电子技术——反馈系统概述

许多物理系统都会形成反馈系统。但是有趣的是,负反馈系统理论却是由电子工程师所完善的。自从1928年第一个负反馈放大器诞生开始,负反馈系统从此登上历史的舞台,现在负反馈系统不光只用在电子工程上,而且还渗透到各个学科上,例如生物学。
反馈系统可以分为 负反馈 和 正反馈 。在放大器设计中,使用负反馈的主要原因是:
- 稳定增益:让放大器的增益尽量稳定,减少对外界因素的依赖,例如温度。
- 减少非线性失真:让放大器的输出正比于输入。
- 减少噪声影响:减少输出中无关信号的产生。
- 控制输入和输出阻抗:通过选择不同的反馈网络的拓扑结构,增加或减少输入和输出阻抗。
- 扩大放大器带宽。
反馈网络实现上述所有特性的代价就是减小了增益系数。减小的倍数我们称为 反馈因子 ,实际上反馈因子还出现在其他特性上,例如带宽增大了反馈因子倍。总之,负反馈的核心思想就是在各种特性中进行折中。本章我们学习反馈系统的分析、设计和特性。
在一些特定的条件下,负反馈放大器可能变成正反馈以及引起不必要的震荡。实际上,我们将会在之后的章节学习正反馈实现的震荡电路和双稳态电路。在本章,我们只关心稳态放大器,我们将会学习放大器的问题问题以及如何抑制不必要的震荡。
信号流程图
下图展示了一个基本的负反馈放大器:
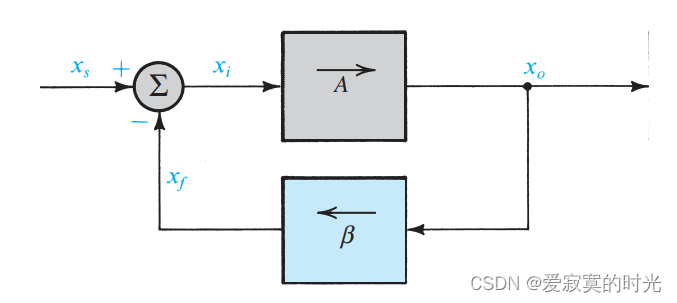
为了一般化表示,我们不使用电流量或者电压量这种具体的物理量表示,而是使用代数 量
x
x
x 表示。该放大器是单边的,增益为
A
A
A ,称为 开环增益 ,输出为:
x o = A x i x_o = Ax_i xo=Axi
图片下面的 反馈网络 对输出量进行测量或采样,提供一个负反馈信号 x f x_f xf :
x f = β x o x_f = \beta x_o xf=βxo
这里的 β \beta β 称为 反馈因子 。
现在我们假设连接到输出端的反馈网络不会改变放大器的增益或是 x o x_o xo 。也就是反馈网络不会重写放大器的输出。并且,放大器是单边的。
负反馈信号从源信号 x s x_s xs 中减去得到输入信号:
x i = x s − x f x_i = x_s - x_f xi=xs−xf
这里我们注意到减法操作使得反馈是负反馈,负反馈减小了输入量的强度。这里我们建设,负反馈信号和源信号通过减法器或是差分输入到放大器中,即反馈网络不会重写放大器的输入。
闭环增益
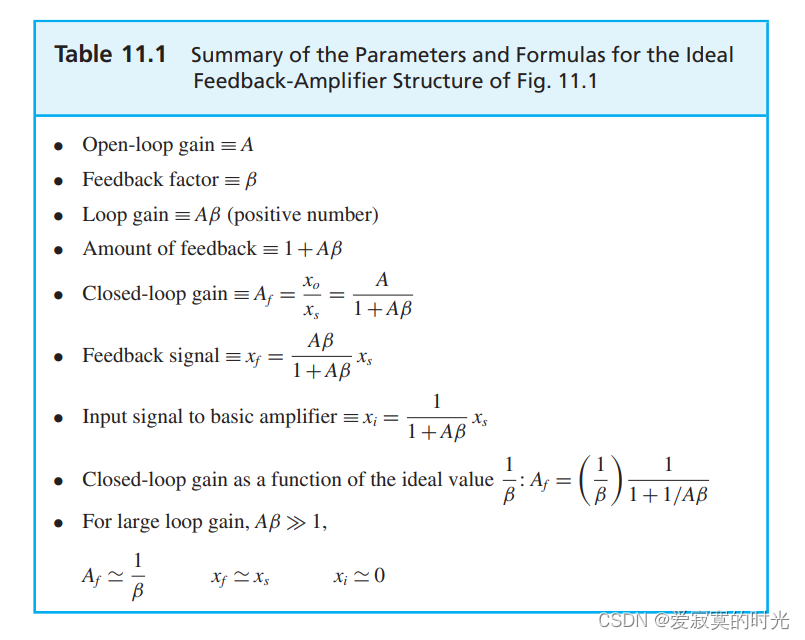
负反馈放大器的增益,称为 闭环增益 或是负反馈增益,记为 A f A_f Af ,定义为:
A f ≡ x o x s A_f \equiv \frac{x_o}{x_s} Af≡xsxo
带入上面的表达式我们得到:
A f = A 1 + A β A_f = \frac{A}{1 + A\beta} Af=1+AβA
我们称 A β A\beta Aβ 为 环路增益 ,若反馈是负反馈,则 A β A\beta Aβ 一定是一个正数,也就是说, x s x_s xs 必须和 x f x_f xf 同号,这样才能产生一个更小的 x i x_i xi 。上式表示,闭环增益是开环增益的 1 1 + A β \frac{1}{1 + A\beta} 1+Aβ1 倍,我们称 1 1 + A β \frac{1}{1 + A\beta} 1+Aβ1 为 反馈量 。
对于一些电路, A β ≫ 1 A\beta \gg 1 Aβ≫1 此时闭环增益可以近似为:
A f ≃ 1 β A_f \simeq \frac{1}{\beta} Af≃β1
这是一个有意思的结果,这表明若环路增益较大,那么闭环增益几乎完全取决于负反馈网络。因为反馈网络通常使用被动元件组成,因此可以选用数值更加精确的被动元件,从而获得更加准确、稳定的闭环增益,这也是负反馈放大器的优点之一。换句话说,闭环增益对 A A A 的依赖性非常小,这也是我们所期望的,因为 A A A 是由放大器的设计师或是生产厂商所决定的,具有较大的波动范围。我们已经在运算放大器的章节中体会到了这一点,其中运算放大器的闭环增益完全取决于负反馈网络。一般情况下,我们将 1 / β 1 / \beta 1/β 视为 A f A_f Af 。
同时,我们还能导出 x f x_f xf 和 x s x_s xs 的关系:
x f = A β 1 + A β x s x_f = \frac{A \beta}{1 + A \beta} x_s xf=1+AβAβxs
因为 A β ≫ 1 A \beta \gg 1 Aβ≫1 所以 x f ≃ x s x_f \simeq x_s xf≃xs 这说明输入信号 x i x_i xi 降低至几乎为零。此时 x i x_i xi 被称为 误差信号 。对应的,输入端的差分输入电路被称为 比较电路 。
同时,我们还能导出 x i x_i xi 和 x s x_s xs 的关系:
x i = 1 1 + A β x s x_i = \frac{1}{1 + A\beta}x_s xi=1+Aβ1xs
当 A β A\beta Aβ 非常大的时候,此时 x i x_i xi 非常小,这也是运算放大器在输入端的特性,观察到负反馈网络将输入的信号强度减小了 1 1 + A β \frac{1}{1 + A\beta} 1+Aβ1 倍。在之后我们会发现,这增加了放大器的线性特性。
环路增益
从上述分析中,我们知道环路增益 A β A\beta Aβ 是一个非常重要的量,实际上是负反馈放大器中最重要的参数:
- 环路增益 A β A\beta Aβ 符号决定了反馈的类型。在负反馈放大器中 A β A\beta Aβ 必须是一个正数。
- 环路增益 A β A\beta Aβ 的大小决定了 A f A_f Af 与理想值 1 β \frac{1}{\beta} β1 之间的误差。
- 环路增益 A β A\beta Aβ 的大小决定了反馈量 1 + A β 1 + A\beta 1+Aβ ,反馈量决定了负反馈放大器的各个特性的值。
- 在以后我们会知道,在一些特定的频率下, A β A\beta Aβ 可能会变成负值,这会使得放大器不稳定。设计一个稳定的放大器需要修改放大器的频率特性使得 A β A\beta Aβ 正常工作。
为了确定环路增益,我们可以使用下面的方法:
- 让 x s = 0 x_s = 0 xs=0 。
- 断开反馈网络和输出端的连接。因为反馈网络不重写输出,因此我们可以让增益 A A A 保持不变。
- 在反馈网络的输入端输入一个测试信号 x t x_t xt 并测量放大器的输出信号 x r x_r xr 。
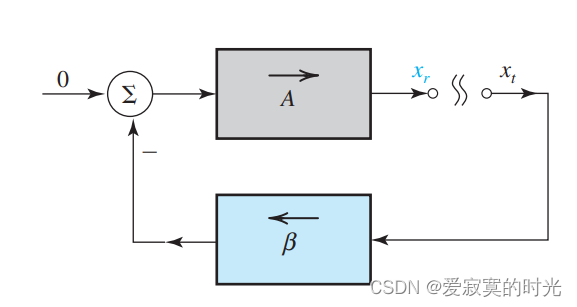
我们可以得出:
x r = − A β x t x_r = -A \beta x_t xr=−Aβxt
则环路增益为:
A β = − x r x t A \beta = - \frac{x_r}{x_t} Aβ=−xtxr
我们注意到,若 A β A \beta Aβ 是正的,那么 x r x_r xr 和 x t x_t xt 必须是反相信号。这个方法也被用来测试反馈放大器的极性。
总结
![推荐系统[三]:粗排算法常用模型汇总(集合选择和精准预估),技术发展历史(向量內积,WideDeep等模型)以及前沿技术](https://img-blog.csdnimg.cn/b935ff75e3e84d7f88de39613bb02bad.png)