文章目录
- 4.1 概述
- 4.2 有穷状态机
- 4.3 Petri网
- 4.4 Z语言
- 按照形式化程度,可以把软件工程使用的方法划分成非形式化、半形式化、形式化三类
- 非形式化方法:使用自然语言描述需求规格说明
- 半形式化方法:使用数据流图或实体-联系图建立模型
- 形式化方法:描述系统性质的基于数学的技术,即有坚实的数学基础的方法就是形式化方法
4.1 概述
- 非形式化方法的缺点
- (1)矛盾,一组相互冲突的描述;
- (2)二义性,读者可有不同的理解;
- (3)含糊性,说明不清楚;
- (4)不完整性;
- (5)抽象层次混乱,非常抽象的陈述中有关于细节的低层陈述。
- 【注意】用自然语言描述需求规格说明,是典型的非形式化方法。
- 形式化方法的优点
- (1)能保证规格说明中尽可能没有矛盾、二义性、含糊性和不完整性。
- (2)可以在不同的软件工程活动之间平滑地过渡。
- (3)提供了高层确认的手段,可以使用数学方法进行证明验证。
- 形式化方法的缺点
- (1)难于表示问题的时序、控制和行为等方面的需求。
- (2)相比欠形式化方法,它更难学习,培训的投资过大。
- 【注意】如果一种方法有坚实的数学基础,那么它就是形式化的。
- 应用形式化方法的准则
- (1)应该选用适当的表示方法。
- (2)应该形式化,但不要过分形式化。
- (3)应该估算成本。
- (4)应该有形式化方法顾问随时提供咨询。
- (5)不应该放弃传统的开发方法。
- (6)应该建立详尽的文档。
- (7)不应该放弃质量标准。
- (8)不应该盲目依赖形式化方法。
- (9)应该测试、测试再测试。
- (10)应该重用。
4.2 有穷状态机
- 概念
- (1)定义
- 有穷状态机是表达规格说明的一种形式化方法。
- (2)构成
- 一个有穷状态机包括下述5个部分:状态集J、输入集K、由当前状态和当前输入确定下一个状态(次态)的转换函数T、初始态S和终态集F。一个有穷状态机可以表示为一个5元组(J,K,T,S,F)。其中:J是一个有穷的非空状态集;K是一个有穷的非空输入集;T是一个从(J-F)×K到J的转换函数;S∈J,是一个初始状态;F⊆J,是终态集。
- (3)状态转换形式
- 当前状态[菜单]+事件[所选择的项]⇒下个状态
- (4)谓词集P
- ① 谓词集P把有穷状态机扩展为一个6元组,其中每个谓词都是系统全局状态Y的函数。
- ② 加入谓词集后转换规则形式为:当前状态[菜单]+事件[所选择的项]+谓词⇒下个状态。
- (1)定义
- 评价
- (1)优点
- ① 采用易于书写、易于验证的格式来描述规格说明,能容易地把规格说明转变成设计或程序代码。
- ② 比数据流图技术更精确且易于理解。
- (2)缺点
- ① 在开发一个大系统时,三元组(即状态、事件、谓词)的数量会迅速增长。
- ② 形式化的有穷状态机方法没有处理定时需求。
- (1)优点
4.3 Petri网
- 概念
- (1)构成
- ① 一般构成
- Petri网包含4种元素:一组位置P、一组转换T、输入函数I,以及输出函数O。如图4-1为Petri网的实例。
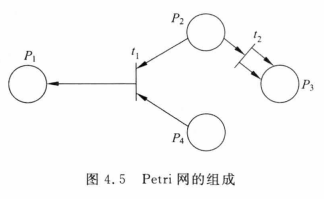
- a.一组位置P为{P1,P2,P3,P4},在图中用圆圈代表位置。
- b.一组转换T为{T1,T2},在图中用短直线表示转换。
- c.两个用于转换的输入函数,用由位置指向转换的箭头表示,它们是:
- I(t1)={P2,P4}
- I(t2)={P2}
- d.两个用于转换的输出函数,用由转换指向位置的箭头表示,它们是:
- O(t1)={P1}
- O(t2)={P3,P3}
- 【注意】输出函数O(t2)中有两个P3,是因为有两个箭头由t2指向P3。
- ② 形式化的Petri网
- 更形式化的Petri网结构是一个四元组:
- C=(P,T,I,O)
- 其中:
- a.P={P1,…,Pn}是一个有穷位置集,n≥0。
- b.T={t1,…,tm}是一个有穷转换集,m≥0,且T和P不相交。
- c.I:T→P^∞为输入函数,是由转换到位置无序单位组(bags)的映射。
- d.O:T→P^∞为输出函数,是由转换到位置无序单位组的映射。
- ① 一般构成
- (2)作用
- 用于确定系统中隐含的定时问题,可以有效地描述并发活动。
4.4 Z语言
- 组成部分
- (1)给定的集合;
- (2)状态定义;
- (3)初始状态;
- (4)操作。
- 优点
- (1)可以比较容易地发现用Z写的规格说明的错误;
- (2)使用Z写规格说明时对精确性要求高,减少了模糊性、不一致性和遗漏;
- (3)可以降低软件开发费用;
- 用Z写规格说明,更加清楚和正确。