编程接口

文章目录
- 编程接口
- 3.1利用NVCC编译
- 3.1.1编译流程
- 3.1.1.1 离线编译
- 3.1.1.2 即时编译
- 3.1.2 Binary 兼容性
- 注意:仅桌面支持二进制兼容性。 Tegra 不支持它。 此外,不支持桌面和 Tegra 之间的二进制兼容性。
- 3.1.3 PTX 兼容性
- 3.1.4 应用程序兼容性
- 3.1.5 C++兼容性
- 3.1.6 64位支持
- 3.2 CUDA运行时
- 3.2.1 初始化
- 注意:CUDA接口使用全局状态,在主机程序初始化时初始化,在主机程序终止时销毁。 CUDA 运行时和驱动程序无法检测此状态是否无效,因此在程序启动或 main 后终止期间使用任何这些接口(隐式或显式)将导致未定义的行为。
- 3.2.2 设备存储
- 注意:在计算能力为 5.3 (Maxwell) 及更早版本的设备上,CUDA 驱动程序会创建一个未提交的 40 位虚拟地址预留,以确保内存分配(指针)在支持的范围内。 此预留显示为预留虚拟内存,但在程序实际分配内存之前不会占用任何物理内存。
- 注意:为避免分配过多内存从而影响系统范围的性能,请根据问题大小向用户请求分配参数。 如果分配失败,您可以回退到其他较慢的内存类型(cudaMallocHost()、cudaHostRegister() 等),或者返回一个错误,告诉用户需要多少内存被拒绝。 如果您的应用程序由于某种原因无法请求分配参数,我们建议对支持它的平台使用 cudaMallocManaged()。
- 3.2.3 L2级设备内存管理
- 3.2.3.1 为持久访问预留L2缓存
- 3.2.3.2 L2持久化访问策略
- 3.2.3.3 L2访问属性
- 3.2.3.4 L2持久性示例
- 3.2.3.5 将L2 Access重置为Normal
- 3.2.3.6 管理L2预留缓存的利用率
- 3.2.3.7 查询L2缓存属性
- 3.2.3.8 控制L2缓存预留大小用于持久内存访问
- 3.2.4共享内存
- 3.2.5 Page-Locked主机内存
- 注意:页面锁定的主机内存不会缓存在非 I/O 一致的 Tegra 设备上。 此外,非 I/O 一致的 Tegra 设备不支持 cudaHostRegister()。
- 3.2.5.1 Portable Memory
- 3.2.5.2 写合并内存
- 3.2.5.3 Mapped Memory
- 3.2.6 异步并发执行
- 3.2.6.1 主机和设备之间的并发执行
- 3.2.6.2 并行执行内核
- 3.2.6.3 数据传输和内核执行的重叠
- 3.2.6.4 并行数据传输
- 3.2.6.5 流
- 3.2.6.5.1 创建与销毁
- 3.2.6.5.2 默认流
- 注意:当代码由 nvcc 编译时,`#define CUDA_API_PER_THREAD_DEFAULT_STREAM 1` 不能用于启用此行为,因为 nvcc 在翻译单元的顶部隐式包含 cuda_runtime.h。在这种情况下,需要使用 `--default-stream` 每个线程编译标志,或者需要使用 `-DCUDA_API_PER_THREAD_DEFAULT_STREAM=1` 编译器标志定义 `CUDA_API_PER_THREAD_DEFAULT_STREAM` 宏。
- 3.2.6.5.3 显式同步
- 3.2.6.5.4 隐式同步
- 3.2.6.5.5 重叠行为
- 3.2.6.5.6 Host函数(回调)
- 3.2.6.5.7 流优先级
- 3.2.6.6 CUDA图
- 3.2.6.6.1图架构
- 3.2.6.6.1.1 节点类型
- 3.2.6.6.2利用API创建图
- 3.2.6.6.3 使用流捕获创建图
- 3.2.6.6.3.1 跨流依赖性和事件
- 注意:当流退出捕获模式时,流中的下一个未捕获项(如果有)仍将依赖于最近的先前未捕获项,尽管已删除中间项。
- 3.2.6.6.3.2 禁止和未处理的操作
- 注意:作为一般规则,当依赖关系将捕获的内容与未捕获的内容联系起来并排队执行时,CUDA 更喜欢返回错误而不是忽略依赖关系。将流放入或退出捕获模式时会出现异常;这切断了在模式转换之前和之后添加到流中的项目之间的依赖关系。
- 3.2.6.6.3.3失效
- 3.2.6.6.4 更新实例化图
- 3.2.6.6.4.1 图更新限制
- 3.2.6.6.4.2全图更新
- 3.2.6.6.4.3 单个节点更新
- 3.2.6.6.5 使用图API
- 3.2.6.7 事件
- 3.2.6.7.1 创建和销毁
- 3.2.6.7.2 计算时间
- 3.2.6.8同步调用
- 3.2.7 多设备系统
- 3.2.7.1设备枚举
- 3.2.7.2 设备选择
- 3.2.7.3 流和事件行为
- 3.2.7.4 Peer-to-Peer的内存访问
- 3.2.7.4.1 Linux上的IOMMU
- 3.2.7.5 Peer-to-Peer内存拷贝
- 统一虚拟地址空间
- 3.2.9 进程间通信
- 注意:自 CUDA 11.5 起,L4T 和具有计算能力 7.x 及更高版本的嵌入式 Linux Tegra 设备仅支持事件共享 IPC API。 Tegra 平台仍然不支持内存共享 IPC API。
- 3.2.10 错误检查
- 3.2.11 调用栈
- 3.2.12 纹理内存和表面内存(surface memory)
- 3.2.12.1纹理内存
- 3.2.12.1.1 纹理对象API
- 3.2.12.1.2 [[已弃用]] 纹理引用 API
- 3.2.12.1.3 16位浮点类型纹理
- 3.2.12.1.4 分层纹理
- 3.2.12.1.5 立方体纹理(Cubemap Textures)
- 3.2.12.1.6 分层的立方体纹理内存(Cubemap Layered Textures)
- 3.2.12.1.7 纹理收集(Texture Gather)
- 3.2.12.2 表面内存(Surface Memory)
- 3.2.12.2.1 表面内存对象API
- 3.2.12.2.3 立方体表面内存
- 3.2.12.2.4 立方体分层表面内存
- 3.2.12.3 CUDA Array
- 3.2.12.4 读写一致性
- 3.2.13图形一致性
- 3.2.13.1. OpenGL 一致性
- 请注意:当 OpenGL 纹理设置为无绑定时(例如,通过使用 `glGetTextureHandle*/glGetImageHandle*` API 请求图像或纹理句柄),它不能在 CUDA 中注册。应用程序需要在请求图像或纹理句柄之前注册纹理以进行互操作。
- 3.2.13.2. Direct3D 一致性
- 3.2.13.3 SLI一致性
- 3.2.14 扩展资源一致性
- 3.2.15 CUDA用户对象
- 3.3 版本和兼容性
- 3.4 Compute Modes
- 3.5 模式切换
- 3.6 在Windows上的Tesla计算集群
CUDA C++ 为熟悉 C++ 编程语言的用户提供了一种简单的途径,可以轻松编写由设备执行的程序。
它由c++语言的最小扩展集和运行时库组成。
编程模型中引入了核心语言扩展。它们允许程序员将内核定义为 C++ 函数,并在每次调用函数时使用一些新语法来指定网格和块的维度。所有扩展的完整描述可以在 C++ 语言扩展中找到。任何包含这些扩展名的源文件都必须使用 nvcc 进行编译,如使用NVCC编译中所述。
运行时在 CUDA Runtime 中引入。它提供了在主机上执行的 C 和 C++ 函数,用于分配和释放设备内存、在主机内存和设备内存之间传输数据、管理具有多个设备的系统等。运行时的完整描述可以在 CUDA 参考手册中找到。
运行时构建在较低级别的 C API(即 CUDA 驱动程序 API)之上,应用程序也可以访问该 API。驱动程序 API 通过公开诸如 CUDA 上下文(类似于设备的主机进程)和 CUDA 模块(类似于设备的动态加载库)等较低级别的概念来提供额外的控制级别。大多数应用程序不使用驱动程序 API,因为它们不需要这种额外的控制级别,并且在使用运行时时,上下文和模块管理是隐式的,从而产生更简洁的代码。由于运行时可与驱动程序 API 互操作,因此大多数需要驱动程序 API 功能的应用程序可以默认使用运行时 API,并且仅在需要时使用驱动程序 API。 Driver API 中介绍了驱动API并在参考手册中进行了全面描述。
3.1利用NVCC编译
内核可以使用称为 PTX 的 CUDA 指令集架构来编写,PTX 参考手册中对此进行了描述。 然而,使用高级编程语言(如 C++)通常更有效。 在这两种情况下,内核都必须通过 nvcc 编译成二进制代码才能在设备上执行。
nvcc 是一种编译器驱动程序,可简化编译 C++ 或 PTX 代码:它提供简单且熟悉的命令行选项,并通过调用实现不同编译阶段的工具集合来执行它们。 本节概述了 nvcc 工作流程和命令选项。 完整的描述可以在 nvcc 用户手册中找到。
3.1.1编译流程
3.1.1.1 离线编译
使用 nvcc 编译的源文件可以包含主机代码(即在host上执行的代码)和设备代码(即在device上执行的代码。 nvcc 的基本工作流程包括将设备代码与主机代码分离,然后:
- 将设备代码编译成汇编形式(
PTX代码)或二进制形式(cubin对象) - 并通过CUDA运行时函数的调用来替换 <<<…>>> 语法对主机代码进行修改,以从
PTX代码或cubin对象加载和启动每个编译的内核。
修改后的主机代码要么作为 C++ 代码输出,然后使用另一个工具编译,要么直接作为目标代码输出,方法是让 nvcc 在最后编译阶段调用主机编译器。
然后应用程序可以:
- 链接到已编译的主机代码(这是最常见的情况),
- 或者忽略修改后的主机代码(如果有)并使用 CUDA 驱动程序 API(请参阅驱动程序 API)来加载和执行
PTX代码或cubin对象。
3.1.1.2 即时编译
应用程序在运行时加载的任何 PTX 代码都由设备驱动程序进一步编译为二进制代码。这称为即时编译。即时编译增加了应用程序加载时间,但允许应用程序受益于每个新设备驱动程序带来的任何新编译器改进。它也是应用程序能够运行在编译时不存在的设备上的唯一方式,如应用程序兼容性中所述。
当设备驱动程序为某些应用程序实时编译一些 PTX 代码时,它会自动缓存生成二进制代码的副本,以避免在应用程序的后续调用中重复编译。缓存(称为计算缓存)在设备驱动程序升级时自动失效,因此应用程序可以从设备驱动程序中内置的新即时编译器的改进中受益。
环境变量可用于控制即时编译,如 CUDA 环境变量中所述
作为使用 nvcc 编译 CUDA C++ 设备代码的替代方法,NVRTC 可用于在运行时将 CUDA C++ 设备代码编译为 PTX。 NVRTC 是 CUDA C++ 的运行时编译库;更多信息可以在 NVRTC 用户指南中找到。
3.1.2 Binary 兼容性
二进制代码是特定于体系结构的。 使用指定目标体系结构的编译器选项 -code 生成 cubin 对象:例如,使用 -code=sm_35 编译会为计算能力为 3.5 的设备生成二进制代码。 从一个次要修订版到下一个修订版都保证了二进制兼容性,但不能保证从一个次要修订版到前一个修订版或跨主要修订版。 换句话说,为计算能力 X.y 生成的 cubin 对象只会在计算能力 X.z 且 z≥y 的设备上执行。
注意:仅桌面支持二进制兼容性。 Tegra 不支持它。 此外,不支持桌面和 Tegra 之间的二进制兼容性。
3.1.3 PTX 兼容性
某些 PTX 指令仅在具有更高计算能力的设备上受支持。 例如,Warp Shuffle Functions 仅在计算能力 3.0 及以上的设备上支持。 -arch 编译器选项指定将 C++ 编译为 PTX 代码时假定的计算能力。 因此,例如,包含 warp shuffle 的代码必须使用 -arch=compute_30(或更高版本)进行编译。
为某些特定计算能力生成的 PTX 代码始终可以编译为具有更大或相等计算能力的二进制代码。 请注意,从早期 PTX 版本编译的二进制文件可能无法使用某些硬件功能。 例如,从为计算能力 6.0 (Pascal) 生成的 PTX 编译的计算能力 7.0 (Volta) 的二进制目标设备将不会使用 Tensor Core 指令,因为这些指令在 Pascal 上不可用。 因此,最终二进制文件的性能可能会比使用最新版本的 PTX 生成的二进制文件更差。
3.1.4 应用程序兼容性
要在具有特定计算能力的设备上执行代码,应用程序必须加载与此计算能力兼容的二进制或 PTX 代码,如二进制兼容性和 PTX 兼容性中所述。 特别是,为了能够在具有更高计算能力的未来架构上执行代码(尚无法生成二进制代码),应用程序必须加载将为这些设备实时编译的 PTX 代码(参见即时编译)。
哪些 PTX 和二进制代码嵌入到 CUDA C++ 应用程序中由 -arch 和 -code 编译器选项或 -gencode 编译器选项控制,详见 nvcc 用户手册。 例如:
nvcc x.cu
-gencode arch=compute_50,code=sm_50
-gencode arch=compute_60,code=sm_60
-gencode arch=compute_70,code=\"compute_70,sm_70\"
嵌入与计算能力 5.0 和 6.0(第一和第二-gencode 选项)兼容的二进制代码以及与计算能力 7.0(第三-gencode 选项)兼容的 PTX 和二进制代码。
生成主机代码以在运行时自动选择最合适的代码来加载和执行,在上面的示例中,这些代码将是:
- 具有计算能力 5.0 和 5.2 的设备的 5.0 二进制代码,
- 具有计算能力 6.0 和 6.1 的设备的 6.0 二进制代码,
- 具有计算能力 7.0 和 7.5 的设备的 7.0 二进制代码,
- PTX 代码在运行时编译为具有计算能力 8.0 和 8.6 的设备的二进制代码。
例如,x.cu 可以有一个优化代码的方法,使用 warp shuffle 操作,这些操作仅在计算能力 3.0 及更高版本的设备中受支持。 __CUDA_ARCH__ 宏可用于根据计算能力区分各种代码方案。 它仅为设备代码定义。 例如,当使用 -arch=compute_35 编译时,__CUDA_ARCH__ 等于 350。
使用驱动 API 的应用程序必须编译代码以分离文件并在运行时显式加载和执行最合适的文件。
Volta 架构引入了独立线程调度,它改变了在 GPU 上调度线程的方式。 对于依赖于以前架构中 SIMT 调度的特定行为的代码,独立线程调度可能会改变参与线程的集合,从而导致不正确的结果。 为了在实现独立线程调度中详述的纠正措施的同时帮助迁移,Volta 开发人员可以使用编译器选项组合 -arch=compute_60 -code=sm_70 选择加入 Pascal 的线程调度。
nvcc 用户手册列出了 -arch、-code 和 -gencode 编译器选项的各种简写。 例如,-arch=sm_70 是 -arch=compute_70 -code=compute_70,sm_70 的简写(与 -gencode arch=compute_70,code=\"compute_70,sm_70\" 相同)。
3.1.5 C++兼容性
编译器前端根据 C++ 语法规则处理 CUDA 源文件。 主机代码支持完整的 C++。 但是,设备代码仅完全支持 C++ 的一个子集,如 C++ 语言支持中所述。
3.1.6 64位支持
64 位版本的 nvcc 以 64 位模式编译设备代码(即指针是 64 位的)。 以 64 位模式编译的设备代码仅支持以 64 位模式编译的主机代码。
同样,32 位版本的 nvcc 以 32 位模式编译设备代码,而以 32 位模式编译的设备代码仅支持以 32 位模式编译的主机代码。
32 位版本的 nvcc 也可以使用 -m64 编译器选项以 64 位模式编译设备代码。
64 位版本的 nvcc 也可以使用 -m32 编译器选项以 32 位模式编译设备代码。
3.2 CUDA运行时
运行时在 cudart 库中实现,该库链接到应用程序,可以通过 cudart.lib 或 libcudart.a 静态链接,也可以通过 cudart.dll 或 libcudart.so 动态链接。 需要 cudart.dll 或 cudart.so 进行动态链接的应用程序通常将它们作为应用程序安装包的一部分。 只有在链接到同一 CUDA 运行时实例的组件之间传递 CUDA 运行时符号的地址才是安全的。
它的所有入口都以 cuda 为前缀。
如异构编程中所述,CUDA 编程模型假设系统由主机和设备组成,每个设备都有自己独立的内存。 设备内存概述了用于管理设备内存的运行时函数。
共享内存说明了使用线程层次结构中引入的共享内存来最大化性能。
Page-Locked Host Memory 引入了 page-locked 主机内存,它需要将内核执行与主机设备内存之间的数据传输重叠。
异步并发执行描述了用于在系统的各个级别启用异步并发执行的概念和 API。
多设备系统展示了编程模型如何扩展到具有多个设备连接到同一主机的系统。
错误检查描述了如何正确检查运行时生成的错误。
调用堆栈提到了用于管理 CUDA C++ 调用堆栈的运行时函数。
Texture and Surface Memory 呈现了纹理和表面内存空间,它们提供了另一种访问设备内存的方式;它们还公开了 GPU 纹理硬件的一个子集。
图形互操作性介绍了运行时提供的各种功能,用于与两个主要图形 API(OpenGL 和 Direct3D)进行互操作。
3.2.1 初始化
运行时没有显式的初始化函数;它在第一次调用运行时函数时进行初始化(更具体地说,除了参考手册的错误处理和版本管理部分中的函数之外的任何函数)。在计时运行时函数调用以及将第一次调用的错误代码解释到运行时时,需要牢记这一点。
运行时为系统中的每个设备创建一个 CUDA 上下文(有关 CUDA 上下文的更多详细信息,请参阅上下文)。此context是此设备的主要上下文,并在需要此设备上的活动上下文的第一个运行时函数中初始化。它在应用程序的所有主机线程之间共享。作为此上下文创建的一部分,设备代码会在必要时进行即时编译(请参阅即时编译)并加载到设备内存中。这一切都是透明地发生的。如果需要,例如对于驱动程序 API 互操作性,可以从驱动程序 API 访问设备的主要上下文,如运行时和驱动程序 API 之间的互操作性中所述。
当主机线程调用 cudaDeviceReset() 时,这会破坏主机线程当前操作的设备的主要上下文(即设备选择中定义的当前设备)。 任何将此设备作为当前设备的主机线程进行的下一个运行时函数调用将为该设备创建一个新的主上下文。
注意:CUDA接口使用全局状态,在主机程序初始化时初始化,在主机程序终止时销毁。 CUDA 运行时和驱动程序无法检测此状态是否无效,因此在程序启动或 main 后终止期间使用任何这些接口(隐式或显式)将导致未定义的行为。
3.2.2 设备存储
如异构编程中所述,CUDA 编程模型假设系统由主机和设备组成,每个设备都有自己独立的内存。 内核在设备内存之外运行,因此运行时提供了分配、解除分配和复制设备内存以及在主机内存和设备内存之间传输数据的功能。
设备内存可以分配为线性内存或 CUDA 数组。
CUDA 数组是针对纹理获取优化的不透明内存布局。 它们在纹理和表面内存中有所描述。
线性内存分配在一个统一的地址空间中,这意味着单独分配的实体可以通过指针相互引用,例如在二叉树或链表中。 地址空间的大小取决于主机系统 (CPU) 和所用 GPU 的计算能力:
Table 1. Linear Memory Address Space
| x86_64 (AMD64) | POWER (ppc64le) | ARM64 | |
|---|---|---|---|
| up to compute capability 5.3 (Maxwell) | 40bit | 40bit | 40bit |
| compute capability 6.0 (Pascal) or newer | up to 47bit | up to 49bit | up to 48bit |
注意:在计算能力为 5.3 (Maxwell) 及更早版本的设备上,CUDA 驱动程序会创建一个未提交的 40 位虚拟地址预留,以确保内存分配(指针)在支持的范围内。 此预留显示为预留虚拟内存,但在程序实际分配内存之前不会占用任何物理内存。
线性内存通常使用 cudaMalloc() 分配并使用 cudaFree() 释放,主机内存和设备内存之间的数据传输通常使用 cudaMemcpy() 完成。 在Kernels的向量加法代码示例中,需要将向量从主机内存复制到设备内存:
// Device code
__global__ void VecAdd(float* A, float* B, float* C, int N)
{
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < N)
C[i] = A[i] + B[i];
}
// Host code
int main()
{
int N = ...;
size_t size = N * sizeof(float);
// Allocate input vectors h_A and h_B in host memory
float* h_A = (float*)malloc(size);
float* h_B = (float*)malloc(size);
float* h_C = (float*)malloc(size);
// Initialize input vectors
...
// Allocate vectors in device memory
float* d_A;
cudaMalloc(&d_A, size);
float* d_B;
cudaMalloc(&d_B, size);
float* d_C;
cudaMalloc(&d_C, size);
// Copy vectors from host memory to device memory
cudaMemcpy(d_A, h_A, size, cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, size, cudaMemcpyHostToDevice);
// Invoke kernel
int threadsPerBlock = 256;
int blocksPerGrid =
(N + threadsPerBlock - 1) / threadsPerBlock;
VecAdd<<<blocksPerGrid, threadsPerBlock>>>(d_A, d_B, d_C, N);
// Copy result from device memory to host memory
// h_C contains the result in host memory
cudaMemcpy(h_C, d_C, size, cudaMemcpyDeviceToHost);
// Free device memory
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
// Free host memory
...
}
线性内存也可以通过 cudaMallocPitch() 和 cudaMalloc3D() 分配。 建议将这些函数用于 2D 或 3D 数组的分配,因为它确保分配被适当地填充以满足设备内存访问中描述的对齐要求,从而确保在访问行地址或在 2D 数组和其他区域设备内存之间执行复制时获得最佳性能(使用 cudaMemcpy2D() 和 cudaMemcpy3D() 函数)。 返回的间距(或步幅)必须用于访问数组元素。 以下代码示例分配一个width x height的2D浮点数组,并显示如何在设备代码中循环遍历数组元素:
// Host code
int width = 64, height = 64;
float* devPtr;
size_t pitch;
cudaMallocPitch(&devPtr, &pitch,
width * sizeof(float), height);
MyKernel<<<100, 512>>>(devPtr, pitch, width, height);
// Device code
__global__ void MyKernel(float* devPtr,
size_t pitch, int width, int height)
{
for (int r = 0; r < height; ++r) {
float* row = (float*)((char*)devPtr + r * pitch);
for (int c = 0; c < width; ++c) {
float element = row[c];
}
}
}
以下代码示例分配了一个width x height x depth 的3D浮点数组,并展示了如何在设备代码中循环遍历数组元素:
// Host code
int width = 64, height = 64, depth = 64;
cudaExtent extent = make_cudaExtent(width * sizeof(float),
height, depth);
cudaPitchedPtr devPitchedPtr;
cudaMalloc3D(&devPitchedPtr, extent);
MyKernel<<<100, 512>>>(devPitchedPtr, width, height, depth);
// Device code
__global__ void MyKernel(cudaPitchedPtr devPitchedPtr,
int width, int height, int depth)
{
char* devPtr = devPitchedPtr.ptr;
size_t pitch = devPitchedPtr.pitch;
size_t slicePitch = pitch * height;
for (int z = 0; z < depth; ++z) {
char* slice = devPtr + z * slicePitch;
for (int y = 0; y < height; ++y) {
float* row = (float*)(slice + y * pitch);
for (int x = 0; x < width; ++x) {
float element = row[x];
}
}
}
}
注意:为避免分配过多内存从而影响系统范围的性能,请根据问题大小向用户请求分配参数。 如果分配失败,您可以回退到其他较慢的内存类型(cudaMallocHost()、cudaHostRegister() 等),或者返回一个错误,告诉用户需要多少内存被拒绝。 如果您的应用程序由于某种原因无法请求分配参数,我们建议对支持它的平台使用 cudaMallocManaged()。
参考手册列出了用于在使用 cudaMalloc() 分配的线性内存、使用 cudaMallocPitch() 或 cudaMalloc3D() 分配的线性内存、CUDA 数组以及为在全局或常量内存空间中声明的变量分配的内存之间复制内存的所有各种函数。
以下代码示例说明了通过运行时 API 访问全局变量的各种方法:
__constant__ float constData[256];
float data[256];
cudaMemcpyToSymbol(constData, data, sizeof(data));
cudaMemcpyFromSymbol(data, constData, sizeof(data));
__device__ float devData;
float value = 3.14f;
cudaMemcpyToSymbol(devData, &value, sizeof(float));
__device__ float* devPointer;
float* ptr;
cudaMalloc(&ptr, 256 * sizeof(float));
cudaMemcpyToSymbol(devPointer, &ptr, sizeof(ptr));
cudaGetSymbolAddress() 用于检索指向为全局内存空间中声明的变量分配的内存的地址。 分配内存的大小是通过 cudaGetSymbolSize() 获得的。
3.2.3 L2级设备内存管理
当一个 CUDA 内核重复访问全局内存中的一个数据区域时,这种数据访问可以被认为是持久化的。 另一方面,如果数据只被访问一次,那么这种数据访问可以被认为是流式的。
从 CUDA 11.0 开始,计算能力 8.0 及以上的设备能够影响 L2 缓存中数据的持久性,从而可能提供对全局内存的更高带宽和更低延迟的访问。
3.2.3.1 为持久访问预留L2缓存
可以留出一部分 L2 缓存用于持久化对全局内存的数据访问。 持久访问优先使用 L2 缓存的这个预留部分,而对全局内存的正常访问或流式访问只能在持久访问未使用 L2 的这一部分使用。
可以在以下限制内调整用于持久访问的 L2 缓存预留大小:
cudaGetDeviceProperties(&prop, device_id);
size_t size = min(int(prop.l2CacheSize * 0.75), prop.persistingL2CacheMaxSize);
cudaDeviceSetLimit(cudaLimitPersistingL2CacheSize, size); /* set-aside 3/4 of L2 cache for persisting accesses or the max allowed*/
在多实例 GPU (MIG) 模式下配置 GPU 时,L2 缓存预留功能被禁用。
使用多进程服务 (MPS) 时,cudaDeviceSetLimit 无法更改 L2 缓存预留大小。 相反,只能在 MPS 服务器启动时通过环境变量 CUDA_DEVICE_DEFAULT_PERSISTING_L2_CACHE_PERCENTAGE_LIMIT 指定预留大小。
3.2.3.2 L2持久化访问策略
访问策略窗口指定全局内存的连续区域和L2缓存中的持久性属性,用于该区域内的访问。
下面的代码示例显示了如何使用 CUDA 流设置L2持久访问窗口。
cudaStreamAttrValue stream_attribute; // Stream level attributes data structure
stream_attribute.accessPolicyWindow.base_ptr = reinterpret_cast<void*>(ptr); // Global Memory data pointer
stream_attribute.accessPolicyWindow.num_bytes = num_bytes; // Number of bytes for persistence access.
// (Must be less than cudaDeviceProp::accessPolicyMaxWindowSize)
stream_attribute.accessPolicyWindow.hitRatio = 0.6; // Hint for cache hit ratio
stream_attribute.accessPolicyWindow.hitProp = cudaAccessPropertyPersisting; // Type of access property on cache hit
stream_attribute.accessPolicyWindow.missProp = cudaAccessPropertyStreaming; // Type of access property on cache miss.
//Set the attributes to a CUDA stream of type cudaStream_t
cudaStreamSetAttribute(stream, cudaStreamAttributeAccessPolicyWindow, &stream_attribute);
当内核随后在 CUDA 流中执行时,全局内存范围 [ptr…ptr+num_bytes) 内的内存访问比对其他全局内存位置的访问更有可能保留在 L2 缓存中。
也可以为 CUDA Graph Kernel Node节点设置 L2 持久性,如下例所示:
cudaKernelNodeAttrValue node_attribute; // Kernel level attributes data structure
node_attribute.accessPolicyWindow.base_ptr = reinterpret_cast<void*>(ptr); // Global Memory data pointer
node_attribute.accessPolicyWindow.num_bytes = num_bytes; // Number of bytes for persistence access.
// (Must be less than cudaDeviceProp::accessPolicyMaxWindowSize)
node_attribute.accessPolicyWindow.hitRatio = 0.6; // Hint for cache hit ratio
node_attribute.accessPolicyWindow.hitProp = cudaAccessPropertyPersisting; // Type of access property on cache hit
node_attribute.accessPolicyWindow.missProp = cudaAccessPropertyStreaming; // Type of access property on cache miss.
//Set the attributes to a CUDA Graph Kernel node of type cudaGraphNode_t
cudaGraphKernelNodeSetAttribute(node, cudaKernelNodeAttributeAccessPolicyWindow, &node_attribute);
hitRatio 参数可用于指定接收 hitProp 属性的访问比例。 在上面的两个示例中,全局内存区域 [ptr…ptr+num_bytes) 中 60% 的内存访问具有持久属性,40% 的内存访问具有流属性。 哪些特定的内存访问被归类为持久(hitProp)是随机的,概率大约为 hitRatio; 概率分布取决于硬件架构和内存范围。
例如,如果 L2 预留缓存大小为 16KB,而 accessPolicyWindow 中的 num_bytes 为 32KB:
hitRatio为 0.5 时,硬件将随机选择 32KB 窗口中的 16KB 指定为持久化并缓存在预留的 L2 缓存区域中。hitRatio为 1.0 时,硬件将尝试在预留的 L2 缓存区域中缓存整个 32KB 窗口。 由于预留区域小于窗口,缓存行将被逐出以将 32KB 数据中最近使用的 16KB 保留在 L2 缓存的预留部分中。
因此,hitRatio 可用于避免缓存的破坏,并总体减少移入和移出 L2 高速缓存的数据量。
低于 1.0 的 hitRatio 值可用于手动控制来自并发 CUDA 流的不同 accessPolicyWindows 可以缓存在 L2 中的数据量。 例如,让 L2 预留缓存大小为 16KB; 两个不同 CUDA 流中的两个并发内核,每个都有一个 16KB 的 accessPolicyWindow,并且两者的 hitRatio 值都为 1.0,在竞争共享 L2 资源时,可能会驱逐彼此的缓存。 但是,如果两个 accessPolicyWindows 的 hitRatio 值都为 0.5,则它们将不太可能逐出自己或彼此的持久缓存。
3.2.3.3 L2访问属性
为不同的全局内存数据访问定义了三种类型的访问属性:
cudaAccessPropertyStreaming:使用流属性发生的内存访问不太可能在 L2 缓存中持续存在,因为这些访问优先被驱逐。cudaAccessPropertyPersisting:使用持久属性发生的内存访问更有可能保留在 L2 缓存中,因为这些访问优先保留在 L2 缓存的预留部分中。cudaAccessPropertyNormal:此访问属性强制将先前应用的持久访问属性重置为正常状态。来自先前 CUDA 内核的具有持久性属性的内存访问可能会在其预期用途之后很长时间保留在 L2 缓存中。这种使用后的持久性减少了不使用持久性属性的后续内核可用的 L2 缓存量。使用cudaAccessPropertyNormal属性重置访问属性窗口会删除先前访问的持久(优先保留)状态,就像先前访问没有访问属性一样。
3.2.3.4 L2持久性示例
以下示例显示如何为持久访问预留 L2 缓存,通过 CUDA Stream 在 CUDA 内核中使用预留的 L2 缓存,然后重置 L2 缓存。
cudaStream_t stream;
cudaStreamCreate(&stream); // Create CUDA stream
cudaDeviceProp prop; // CUDA device properties variable
cudaGetDeviceProperties( &prop, device_id); // Query GPU properties
size_t size = min( int(prop.l2CacheSize * 0.75) , prop.persistingL2CacheMaxSize );
cudaDeviceSetLimit( cudaLimitPersistingL2CacheSize, size); // set-aside 3/4 of L2 cache for persisting accesses or the max allowed
size_t window_size = min(prop.accessPolicyMaxWindowSize, num_bytes); // Select minimum of user defined num_bytes and max window size.
cudaStreamAttrValue stream_attribute; // Stream level attributes data structure
stream_attribute.accessPolicyWindow.base_ptr = reinterpret_cast<void*>(data1); // Global Memory data pointer
stream_attribute.accessPolicyWindow.num_bytes = window_size; // Number of bytes for persistence access
stream_attribute.accessPolicyWindow.hitRatio = 0.6; // Hint for cache hit ratio
stream_attribute.accessPolicyWindow.hitProp = cudaAccessPropertyPersisting; // Persistence Property
stream_attribute.accessPolicyWindow.missProp = cudaAccessPropertyStreaming; // Type of access property on cache miss
cudaStreamSetAttribute(stream, cudaStreamAttributeAccessPolicyWindow, &stream_attribute); // Set the attributes to a CUDA Stream
for(int i = 0; i < 10; i++) {
cuda_kernelA<<<grid_size,block_size,0,stream>>>(data1); // This data1 is used by a kernel multiple times
} // [data1 + num_bytes) benefits from L2 persistence
cuda_kernelB<<<grid_size,block_size,0,stream>>>(data1); // A different kernel in the same stream can also benefit
// from the persistence of data1
stream_attribute.accessPolicyWindow.num_bytes = 0; // Setting the window size to 0 disable it
cudaStreamSetAttribute(stream, cudaStreamAttributeAccessPolicyWindow, &stream_attribute); // Overwrite the access policy attribute to a CUDA Stream
cudaCtxResetPersistingL2Cache(); // Remove any persistent lines in L2
cuda_kernelC<<<grid_size,block_size,0,stream>>>(data2); // data2 can now benefit from full L2 in normal mode
3.2.3.5 将L2 Access重置为Normal
来自之前CUDA内核的L2缓存在被使用后可能会长期保存在L2中。因此,L2缓存重设为正常状态对于流或正常内存访问很重要,以便以正常优先级使用L2缓存。有三种方法可以将持久访问重置为正常状态。
- 使用访问属性
cudaAccessPropertyNormal重置之前的持久化内存区域。 - 通过调用
cudaCtxResetPersistingL2Cache()将所有持久L2缓存线重置为正常。 - 最终,未触及的空间会自动重置为正常。对自动复位的依赖性很强
3.2.3.6 管理L2预留缓存的利用率
在不同 CUDA 流中同时执行的多个 CUDA 内核可能具有分配给它们的流的不同访问策略窗口。 但是,L2 预留缓存部分在所有这些并发 CUDA 内核之间共享。 因此,这个预留缓存部分的净利用率是所有并发内核单独使用的总和。 将内存访问指定为持久访问的好处会随着持久访问的数量超过预留的 L2 缓存容量而减少。
要管理预留 L2 缓存部分的利用率,应用程序必须考虑以下事项:
- L2 预留缓存的大小。
- 可以同时执行的 CUDA 内核。
- 可以同时执行的所有 CUDA 内核的访问策略窗口。
- 何时以及如何需要 L2 重置以允许正常或流式访问以同等优先级利用先前预留的 L2 缓存。
3.2.3.7 查询L2缓存属性
与 L2 缓存相关的属性是 cudaDeviceProp 结构的一部分,可以使用 CUDA 运行时 API cudaGetDeviceProperties 进行查询
CUDA 设备属性包括:
l2CacheSize:GPU 上可用的二级缓存数量。persistingL2CacheMaxSize:可以为持久内存访问留出的 L2 缓存的最大数量。accessPolicyMaxWindowSize:访问策略窗口的最大尺寸。
3.2.3.8 控制L2缓存预留大小用于持久内存访问
使用 CUDA 运行时 API cudaDeviceGetLimit 查询用于持久内存访问的 L2 预留缓存大小,并使用 CUDA 运行时 API cudaDeviceSetLimit 作为 cudaLimit 进行设置。 设置此限制的最大值是 cudaDeviceProp::persistingL2CacheMaxSize。
enum cudaLimit {
/* other fields not shown */
cudaLimitPersistingL2CacheSize
};
3.2.4共享内存
如可变内存空间说明中所述,共享内存是使用 __shared__ 内存空间说明符分配的。
正如线程层次结构中提到的和共享内存中详述的那样,共享内存预计比全局内存快得多。 它可以用作暂存器内存(或软件管理的缓存),以最大限度地减少来自 CUDA 块的全局内存访问,如下面的矩阵乘法示例所示。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-c2UFxfNl-1676718503924)(matrix-multiplication-without-shared-memory.png)]
以下代码示例是不利用共享内存的矩阵乘法的简单实现。 每个线程读取 A 的一行和 B 的一列,并计算 C 的相应元素,如图所示。因此,从全局内存中读取 A 为 B.width 次,而 B 为读取 A.height 次。
// Matrices are stored in row-major order:
// M(row, col) = *(M.elements + row * M.width + col)
typedef struct {
int width;
int height;
float* elements;
} Matrix;
// Thread block size
#define BLOCK_SIZE 16
// Forward declaration of the matrix multiplication kernel
__global__ void MatMulKernel(const Matrix, const Matrix, Matrix);
// Matrix multiplication - Host code
// Matrix dimensions are assumed to be multiples of BLOCK_SIZE
void MatMul(const Matrix A, const Matrix B, Matrix C)
{
// Load A and B to device memory
Matrix d_A;
d_A.width = A.width; d_A.height = A.height;
size_t size = A.width * A.height * sizeof(float);
cudaMalloc(&d_A.elements, size);
cudaMemcpy(d_A.elements, A.elements, size,
cudaMemcpyHostToDevice);
Matrix d_B;
d_B.width = B.width; d_B.height = B.height;
size = B.width * B.height * sizeof(float);
cudaMalloc(&d_B.elements, size);
cudaMemcpy(d_B.elements, B.elements, size,
cudaMemcpyHostToDevice);
// Allocate C in device memory
Matrix d_C;
d_C.width = C.width; d_C.height = C.height;
size = C.width * C.height * sizeof(float);
cudaMalloc(&d_C.elements, size);
// Invoke kernel
dim3 dimBlock(BLOCK_SIZE, BLOCK_SIZE);
dim3 dimGrid(B.width / dimBlock.x, A.height / dimBlock.y);
MatMulKernel<<<dimGrid, dimBlock>>>(d_A, d_B, d_C);
// Read C from device memory
cudaMemcpy(C.elements, d_C.elements, size,
cudaMemcpyDeviceToHost);
// Free device memory
cudaFree(d_A.elements);
cudaFree(d_B.elements);
cudaFree(d_C.elements);
}
// Matrix multiplication kernel called by MatMul()
__global__ void MatMulKernel(Matrix A, Matrix B, Matrix C)
{
// Each thread computes one element of C
// by accumulating results into Cvalue
float Cvalue = 0;
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
for (int e = 0; e < A.width; ++e)
Cvalue += A.elements[row * A.width + e]
* B.elements[e * B.width + col];
C.elements[row * C.width + col] = Cvalue;
}
以下代码示例是利用共享内存的矩阵乘法实现。在这个实现中,每个线程块负责计算C的一个方形子矩阵Csub,块内的每个线程负责计算Csub的一个元素。如图所示,Csub 等于两个矩形矩阵的乘积:维度 A 的子矩阵 (A.width, block_size) 与 Csub 具有相同的行索引,以及维度 B 的子矩阵(block_size, A.width ) 具有与 Csub 相同的列索引。为了适应设备的资源,这两个矩形矩阵根据需要被分成多个尺寸为 block_size 的方阵,并且 Csub 被计算为这些方阵的乘积之和。这些乘积中的每一个都是通过首先将两个对应的方阵从全局内存加载到共享内存中的,一个线程加载每个矩阵的一个元素,然后让每个线程计算乘积的一个元素。每个线程将这些乘积中的每一个的结果累积到一个寄存器中,并在完成后将结果写入全局内存。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dnyLD8wK-1676718503925)(matrix-multiplication-with-shared-memory.png)]
通过以这种方式将计算分块,我们利用了快速共享内存并节省了大量的全局内存带宽,因为 A 只从全局内存中读取 (B.width / block_size) 次,而 B 被读取 (A.height / block_size) 次.
前面代码示例中的 Matrix 类型增加了一个 stride 字段,因此子矩阵可以用相同的类型有效地表示。 __device__ 函数用于获取和设置元素并从矩阵构建任何子矩阵。
// Matrices are stored in row-major order:
// M(row, col) = *(M.elements + row * M.stride + col)
typedef struct {
int width;
int height;
int stride;
float* elements;
} Matrix;
// Get a matrix element
__device__ float GetElement(const Matrix A, int row, int col)
{
return A.elements[row * A.stride + col];
}
// Set a matrix element
__device__ void SetElement(Matrix A, int row, int col,
float value)
{
A.elements[row * A.stride + col] = value;
}
// Get the BLOCK_SIZExBLOCK_SIZE sub-matrix Asub of A that is
// located col sub-matrices to the right and row sub-matrices down
// from the upper-left corner of A
__device__ Matrix GetSubMatrix(Matrix A, int row, int col)
{
Matrix Asub;
Asub.width = BLOCK_SIZE;
Asub.height = BLOCK_SIZE;
Asub.stride = A.stride;
Asub.elements = &A.elements[A.stride * BLOCK_SIZE * row
+ BLOCK_SIZE * col];
return Asub;
}
// Thread block size
#define BLOCK_SIZE 16
// Forward declaration of the matrix multiplication kernel
__global__ void MatMulKernel(const Matrix, const Matrix, Matrix);
// Matrix multiplication - Host code
// Matrix dimensions are assumed to be multiples of BLOCK_SIZE
void MatMul(const Matrix A, const Matrix B, Matrix C)
{
// Load A and B to device memory
Matrix d_A;
d_A.width = d_A.stride = A.width; d_A.height = A.height;
size_t size = A.width * A.height * sizeof(float);
cudaMalloc(&d_A.elements, size);
cudaMemcpy(d_A.elements, A.elements, size,
cudaMemcpyHostToDevice);
Matrix d_B;
d_B.width = d_B.stride = B.width; d_B.height = B.height;
size = B.width * B.height * sizeof(float);
cudaMalloc(&d_B.elements, size);
cudaMemcpy(d_B.elements, B.elements, size,
cudaMemcpyHostToDevice);
// Allocate C in device memory
Matrix d_C;
d_C.width = d_C.stride = C.width; d_C.height = C.height;
size = C.width * C.height * sizeof(float);
cudaMalloc(&d_C.elements, size);
// Invoke kernel
dim3 dimBlock(BLOCK_SIZE, BLOCK_SIZE);
dim3 dimGrid(B.width / dimBlock.x, A.height / dimBlock.y);
MatMulKernel<<<dimGrid, dimBlock>>>(d_A, d_B, d_C);
// Read C from device memory
cudaMemcpy(C.elements, d_C.elements, size,
cudaMemcpyDeviceToHost);
// Free device memory
cudaFree(d_A.elements);
cudaFree(d_B.elements);
cudaFree(d_C.elements);
}
// Matrix multiplication kernel called by MatMul()
__global__ void MatMulKernel(Matrix A, Matrix B, Matrix C)
{
// Block row and column
int blockRow = blockIdx.y;
int blockCol = blockIdx.x;
// Each thread block computes one sub-matrix Csub of C
Matrix Csub = GetSubMatrix(C, blockRow, blockCol);
// Each thread computes one element of Csub
// by accumulating results into Cvalue
float Cvalue = 0;
// Thread row and column within Csub
int row = threadIdx.y;
int col = threadIdx.x;
// Loop over all the sub-matrices of A and B that are
// required to compute Csub
// Multiply each pair of sub-matrices together
// and accumulate the results
for (int m = 0; m < (A.width / BLOCK_SIZE); ++m) {
// Get sub-matrix Asub of A
Matrix Asub = GetSubMatrix(A, blockRow, m);
// Get sub-matrix Bsub of B
Matrix Bsub = GetSubMatrix(B, m, blockCol);
// Shared memory used to store Asub and Bsub respectively
__shared__ float As[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float Bs[BLOCK_SIZE][BLOCK_SIZE];
// Load Asub and Bsub from device memory to shared memory
// Each thread loads one element of each sub-matrix
As[row][col] = GetElement(Asub, row, col);
Bs[row][col] = GetElement(Bsub, row, col);
// Synchronize to make sure the sub-matrices are loaded
// before starting the computation
__syncthreads();
// Multiply Asub and Bsub together
for (int e = 0; e < BLOCK_SIZE; ++e)
Cvalue += As[row][e] * Bs[e][col];
// Synchronize to make sure that the preceding
// computation is done before loading two new
// sub-matrices of A and B in the next iteration
__syncthreads();
}
// Write Csub to device memory
// Each thread writes one element
SetElement(Csub, row, col, Cvalue);
}
3.2.5 Page-Locked主机内存
运行时提供的函数允许使用锁页(也称为固定)主机内存(与 malloc() 分配的常规可分页主机内存相反):
cudaHostAlloc()和cudaFreeHost()分配和释放锁页主机内存;cudaHostRegister()将malloc()分配的内存范围变为锁页内存(有关限制,请参阅参考手册)。
使用页面锁定的主机内存有几个好处:
- 锁页主机内存和设备内存之间的复制可以与异步并发执行中提到的某些设备的内核执行同时执行。
- 在某些设备上,锁页主机内存可以映射到设备的地址空间,从而无需将其复制到设备内存或从设备内存复制,如映射内存中所述。
- 在具有前端总线的系统上,如果主机内存被分配为页锁定,则主机内存和设备内存之间的带宽更高,如果另外分配为合并访存,则它甚至更高,如合并写入内存中所述。
然而,锁页主机内存是一种稀缺资源,因此锁页内存中的分配将在可分页内存中分配之前很久就开始失败。 此外,通过减少操作系统可用于分页的物理内存量,消耗过多的页面锁定内存会降低整体系统性能。
注意:页面锁定的主机内存不会缓存在非 I/O 一致的 Tegra 设备上。 此外,非 I/O 一致的 Tegra 设备不支持 cudaHostRegister()。
简单的零拷贝 CUDA 示例附带关于页面锁定内存 API 的详细文档。
3.2.5.1 Portable Memory
一块锁页内存可以与系统中的任何设备一起使用(有关多设备系统的更多详细信息,请参阅多设备系统),但默认情况下,使用上述锁页内存的好处只是与分配块时当前的设备一起可用(并且所有设备共享相同的统一地址空间,如果有,如统一虚拟地址空间中所述)。块需要通过将标志cudaHostAllocPortable传递给cudaHostAlloc()来分配,或者通过将标志cudaHostRegisterPortable传递给cudaHostRegister()来锁定页面。
3.2.5.2 写合并内存
默认情况下,锁页主机内存被分配为可缓存的。它可以选择分配为写组合,而不是通过将标志 cudaHostAllocWriteCombined 传递给 cudaHostAlloc()。 写入组合内存释放了主机的 L1 和 L2 缓存资源,为应用程序的其余部分提供更多缓存。 此外,在通过 PCI Express 总线的传输过程中,写入组合内存不会被窥探,这可以将传输性能提高多达 40%。
从主机读取写组合内存非常慢,因此写组合内存通常应用于仅主机写入的内存。
应避免在 WC 内存上使用 CPU 原子指令,因为并非所有 CPU 实现都能保证该功能。
3.2.5.3 Mapped Memory
通过将标志 cudaHostAllocMapped 传递给 cudaHostAlloc() 或通过将标志 cudaHostRegisterMapped 传递给 cudaHostRegister(),也可以将锁页主机内存块映射到设备的地址空间。因此,这样的块通常有两个地址:一个在主机内存中,由 cudaHostAlloc() 或 malloc() 返回,另一个在设备内存中,可以使用 cudaHostGetDevicePointer() 检索,然后用于从内核中访问该块。唯一的例外是使用 cudaHostAlloc() 分配的指针,以及统一虚拟地址空间中提到的主机和设备使用统一地址空间。
直接从内核中访问主机内存不会提供与设备内存相同的带宽,但确实有一些优势:
- 无需在设备内存中分配一个块,并在该块和主机内存中的块之间复制数据;数据传输是根据内核的需要隐式执行的;
- 无需使用流(请参阅并发数据传输)将数据传输与内核执行重叠;内核发起的数据传输自动与内核执行重叠。
然而,由于映射的锁页内存在主机和设备之间共享,因此应用程序必须使用流或事件同步内存访问(请参阅异步并发执行)以避免任何潜在的 read-after-write、write-after-read 或 write-after-write危险。
为了能够检索到任何映射的锁页内存的设备指针,必须在执行任何其他 CUDA 调用之前通过使用 cudaDeviceMapHost 标志调用 cudaSetDeviceFlags() 来启用页面锁定内存映射。否则, cudaHostGetDevicePointer() 将返回错误。
如果设备不支持映射的锁页主机内存,cudaHostGetDevicePointer() 也会返回错误。应用程序可以通过检查 canMapHostMemory 设备属性(请参阅[设备枚举](https://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#device-enumeration)来查询此功能,对于支持映射锁页主机内存的设备,该属性等于 1。
请注意,从主机或其他设备的角度来看,在映射的锁页内存上运行的原子函数(请参阅原子函数)不是原子的。
另请注意,CUDA 运行时要求从主机和其他设备的角度来看,从设备启动到主机内存的 1 字节、2 字节、4 字节和 8 字节自然对齐的加载和存储保留为单一访问设备。在某些平台上,内存的原子操作可能会被硬件分解为单独的加载和存储操作。这些组件加载和存储操作对保留自然对齐的访问具有相同的要求。例如,CUDA 运行时不支持 PCI Express 总线拓扑,其中 PCI Express 桥将 8 字节自然对齐的写入拆分为设备和主机之间的两个 4 字节写入。
3.2.6 异步并发执行
CUDA 将以下操作公开为可以彼此同时操作的独立任务:
- 在主机上计算;
- 设备上的计算;
- 从主机到设备的内存传输;
- 从设备到主机的内存传输;
- 在给定设备的内存中进行内存传输;
- 设备之间的内存传输。
这些操作之间实现的并发级别将取决于设备的功能和计算能力,如下所述。
3.2.6.1 主机和设备之间的并发执行
在设备完成请求的任务之前,异步库函数将控制权返回给宿主线程,从而促进了主机的并发执行。使用异步调用,许多设备操作可以在适当的设备资源可用时排队,由CUDA驱动程序执行。这减轻了主机线程管理设备的大部分责任,让它自由地执行其他任务。以下设备操作对主机是异步的:
- 内核启动;
- 内存复制在单个设备的内存中;
- 从主机到设备内存拷贝的内存块大小不超过64kb的;
- 由带有Async后缀的函数执行的内存拷贝;
- 内存设置函数调用。
程序员可以通过将CUDA_LAUNCH_BLOCKING环境变量设置为1来全局禁用系统上运行的所有CUDA应用程序的内核启动的异步性。此特性仅用于调试目的,不应用作使生产软件可靠运行的一种方法。
如果通过分析器(Nsight、Visual Profiler)收集硬件计数器,则内核启动是同步的,除非启用了并发内核分析。如果异步内存复制涉及非页面锁定的主机内存,它们也将是同步的。
3.2.6.2 并行执行内核
某些计算能力 2.x 及更高版本的设备可以同时执行多个内核。 应用程序可以通过检查 concurrentKernels 设备属性(请参阅设备枚举)来查询此功能,对于支持它的设备,该属性等于 1。
设备可以同时执行的内核启动的最大数量取决于其计算能力,并在表15 中列出。
来自一个 CUDA 上下文的内核不能与来自另一个 CUDA 上下文的内核同时执行。
使用许多纹理或大量本地内存的内核不太可能与其他内核同时执
3.2.6.3 数据传输和内核执行的重叠
一些设备可以在内核执行的同时执行与 GPU 之间的异步内存复制。 应用程序可以通过检查 asyncEngineCount 设备属性(请参阅设备枚举)来查询此功能,对于支持它的设备,该属性大于零。 如果复制中涉及主机内存,则它必须是页锁定的。
还可以与内核执行(在支持 concurrentKernels 设备属性的设备上)或与设备之间的拷贝(对于支持 asyncEngineCount 属性的设备)同时执行设备内复制。 使用标准内存复制功能启动设备内复制,目标地址和源地址位于同一设备上。
3.2.6.4 并行数据传输
某些计算能力为 2.x 及更高版本的设备可以重叠设备之间的数据拷贝。 应用程序可以通过检查 asyncEngineCount 设备属性(请参阅设备枚举)来查询此功能,对于支持它的设备,该属性等于 2。 为了重叠,传输中涉及的任何主机内存都必须是页面锁定的。
3.2.6.5 流
应用程序通过流管理上述并发操作。 流是按顺序执行的命令序列(可能由不同的主机线程发出)。 另一方面,不同的流可能会彼此乱序或同时执行它们的命令; 不能保证此行为,因此不应依赖其正确性(例如,内核间通信未定义)。 当满足命令的所有依赖项时,可以执行在流上发出的命令。 依赖关系可以是先前在同一流上启动的命令或来自其他流的依赖关系。 同步调用的成功完成保证了所有启动的命令都完成了。
3.2.6.5.1 创建与销毁
流是通过创建一个流对象并将其指定为一系列内核启动和主机 <-> 设备内存拷贝的流参数来定义的。 以下代码示例创建两个流并在锁页内存中分配一个浮点数组 hostPtr。
cudaStream_t stream[2];
for (int i = 0; i < 2; ++i)
cudaStreamCreate(&stream[i]);
float* hostPtr;
cudaMallocHost(&hostPtr, 2 * size);
这些流中的每一个都由以下代码示例定义为从主机到设备的一次内存复制、一次内核启动和从设备到主机的一次内存复制的序列:
for (int i = 0; i < 2; ++i) {
cudaMemcpyAsync(inputDevPtr + i * size, hostPtr + i * size,
size, cudaMemcpyHostToDevice, stream[i]);
MyKernel <<<100, 512, 0, stream[i]>>>
(outputDevPtr + i * size, inputDevPtr + i * size, size);
cudaMemcpyAsync(hostPtr + i * size, outputDevPtr + i * size,
size, cudaMemcpyDeviceToHost, stream[i]);
}
每个流将其输入数组 hostPtr 的部分复制到设备内存中的数组 inputDevPtr,通过调用 MyKernel() 处理设备上的 inputDevPtr,并将结果 outputDevPtr 复制回 hostPtr 的同一部分。 重叠行为描述了此示例中的流如何根据设备的功能重叠。 请注意,hostPtr 必须指向锁页主机内存才能发生重叠。
通过调用 cudaStreamDestroy() 释放流:
for (int i = 0; i < 2; ++i)
cudaStreamDestroy(stream[i]);
如果调用 cudaStreamDestroy() 时设备仍在流中工作,则该函数将立即返回,并且一旦设备完成流中的所有工作,与流关联的资源将自动释放。
3.2.6.5.2 默认流
未指定任何流参数或等效地将流参数设置为零的内核启动和主机 <-> 设备内存拷贝将发布到默认流。因此它们按顺序执行。
对于使用 --default-stream per-thread 编译标志编译的代码(或在包含 CUDA 头文件(cuda.h 和 cuda_runtime.h)之前定义 CUDA_API_PER_THREAD_DEFAULT_STREAM 宏),默认流是常规流,并且每个主机线程有自己的默认流。
注意:当代码由 nvcc 编译时,#define CUDA_API_PER_THREAD_DEFAULT_STREAM 1 不能用于启用此行为,因为 nvcc 在翻译单元的顶部隐式包含 cuda_runtime.h。在这种情况下,需要使用 --default-stream 每个线程编译标志,或者需要使用 -DCUDA_API_PER_THREAD_DEFAULT_STREAM=1 编译器标志定义 CUDA_API_PER_THREAD_DEFAULT_STREAM 宏。
对于使用 --default-stream legacy 编译标志编译的代码,默认流是称为 NULL 流的特殊流,每个设备都有一个用于所有主机线程的 NULL 流。 NULL 流很特殊,因为它会导致隐式同步,如隐式同步中所述。
对于在没有指定 --default-stream 编译标志的情况下编译的代码, --default-stream legacy 被假定为默认值。
3.2.6.5.3 显式同步
有多种方法可以显式地同步流。
cudaDeviceSynchronize() 一直等待,直到所有主机线程的所有流中的所有先前命令都完成。
cudaStreamSynchronize() 将流作为参数并等待,直到给定流中的所有先前命令都已完成。 它可用于将主机与特定流同步,允许其他流继续在设备上执行。
cudaStreamWaitEvent() 将流和事件作为参数(有关事件的描述,请参阅事件),并在调用 cudaStreamWaitEvent() 后使添加到给定流的所有命令延迟执行,直到给定事件完成。
cudaStreamQuery() 为应用程序提供了一种方法来了解流中所有前面的命令是否已完成。
3.2.6.5.4 隐式同步
如果主机线程在它们之间发出以下任一操作,则来自不同流的两个命令不能同时运行:
- 页面锁定的主机内存分配,
- 设备内存分配,
- 设备内存设置,
- 两个地址之间的内存拷贝到同一设备内存,
- 对 NULL 流的任何 CUDA 命令,
- 计算能力 3.x 和计算能力 7.x 中描述的 L1/共享内存配置之间的切换。
对于支持并发内核执行且计算能力为 3.0 或更低的设备,任何需要依赖项检查以查看流内核启动是否完成的操作:
- 仅当从 CUDA 上下文中的任何流启动的所有先前内核的所有线程块都已开始执行时,才能开始执行;
- 阻止所有以后从 CUDA 上下文中的任何流启动内核,直到检查内核启动完成。
需要依赖检查的操作包括与正在检查的启动相同的流中的任何其他命令以及对该流的任何 cudaStreamQuery() 调用。 因此,应用程序应遵循以下准则来提高并发内核执行的潜力:
- 所有独立操作都应该在依赖操作之前发出,
- 任何类型的同步都应该尽可能地延迟。
3.2.6.5.5 重叠行为
两个流之间的执行重叠量取决于向每个流发出命令的顺序以及设备是否支持数据传输和内核执行的重叠(请参阅数据传输和内核执行的重叠)、并发内核执行( 请参阅并发内核执行)和并发数据传输(请参阅并发数据传输)。
例如,在设备不支持并行数据传输,这两个流的代码示例创建和销毁不重叠,因为由stream[1]发起的内存复制会在stream[0]发起的内存复制之后执行。如果代码以以下方式重写(并且假设设备支持数据传输和内核执行的重叠)
for (int i = 0; i < 2; ++i)
cudaMemcpyAsync(inputDevPtr + i * size, hostPtr + i * size,
size, cudaMemcpyHostToDevice, stream[i]);
for (int i = 0; i < 2; ++i)
MyKernel<<<100, 512, 0, stream[i]>>>
(outputDevPtr + i * size, inputDevPtr + i * size, size);
for (int i = 0; i < 2; ++i)
cudaMemcpyAsync(hostPtr + i * size, outputDevPtr + i * size,
size, cudaMemcpyDeviceToHost, stream[i]);
那么在stream[1]上从主机到设备的内存复制 与stream[0]上内核启动重叠。
在支持并发数据传输的设备上,Creation 和 Destruction 的代码示例的两个流确实重叠:在stream[1]上从主机到设备的内存复制 与在stream[0]上从设备到主机的内存复制甚至在stream[0]上内核启动(假设设备支持数据传输和内核执行的重叠)。但是,对于计算能力为 3.0 或更低的设备,内核执行不可能重叠,因为在stream[0]上从设备到主机的内存复制之后,第二次在stream[1]上内核启动,因此它被阻塞,直到根据隐式同步,在stream[0]上第一个内核启动已完成。如果代码如上重写,内核执行重叠(假设设备支持并发内核执行),因为在stream[0]上从设备到主机的内存复制之前,第二次在stream[1]上内核启动被。但是,在这种情况下,根据隐式同步,在stream[0]上从设备到主机的内存复制仅与在stream[1]上内核启动的最后一个线程块重叠,这只能代表总数的一小部分内核的执行时间。
3.2.6.5.6 Host函数(回调)
运行时提供了一种通过 cudaLaunchHostFunc() 在任何点将 CPU 函数调用插入到流中的方法。 在回调之前向流发出的所有命令都完成后,在主机上执行提供的函数。
以下代码示例在向每个流发出主机到设备内存副本、内核启动和设备到主机内存副本后,将主机函数 MyCallback 添加到两个流中的每一个。 每个设备到主机的内存复制完成后,该函数将在主机上开始执行。
void CUDART_CB MyCallback(cudaStream_t stream, cudaError_t status, void *data){
printf("Inside callback %d\n", (size_t)data);
}
...
for (size_t i = 0; i < 2; ++i) {
cudaMemcpyAsync(devPtrIn[i], hostPtr[i], size, cudaMemcpyHostToDevice, stream[i]);
MyKernel<<<100, 512, 0, stream[i]>>>(devPtrOut[i], devPtrIn[i], size);
cudaMemcpyAsync(hostPtr[i], devPtrOut[i], size, cudaMemcpyDeviceToHost, stream[i]);
cudaLaunchHostFunc(stream[i], MyCallback, (void*)i);
}
在主机函数之后在流中发出的命令不会在函数完成之前开始执行。
在流中的主机函数不得进行 CUDA API 调用(直接或间接),因为如果它进行这样的调用导致死锁,它可能最终会等待自身。
3.2.6.5.7 流优先级
可以在创建时使用 cudaStreamCreateWithPriority() 指定流的相对优先级。 可以使用 cudaDeviceGetStreamPriorityRange() 函数获得允许的优先级范围,按 [最高优先级,最低优先级] 排序。 在运行时,高优先级流中的待处理工作优先于低优先级流中的待处理工作。
以下代码示例获取当前设备允许的优先级范围,并创建具有最高和最低可用优先级的流。
// get the range of stream priorities for this device
int priority_high, priority_low;
cudaDeviceGetStreamPriorityRange(&priority_low, &priority_high);
// create streams with highest and lowest available priorities
cudaStream_t st_high, st_low;
cudaStreamCreateWithPriority(&st_high, cudaStreamNonBlocking, priority_high);
cudaStreamCreateWithPriority(&st_low, cudaStreamNonBlocking, priority_low);
3.2.6.6 CUDA图
CUDA Graphs 为 CUDA 中的工作提交提供了一种新模型。图是一系列操作,例如内核启动,由依赖关系连接,独立于其执行定义。这允许一个图被定义一次,然后重复启动。将图的定义与其执行分开可以实现许多优化:首先,与流相比,CPU 启动成本降低,因为大部分设置都是提前完成的;其次,将整个工作流程呈现给 CUDA 可以实现优化,这可能无法通过流的分段工作提交机制实现。
要查看图形可能的优化,请考虑流中发生的情况:当您将内核放入流中时,主机驱动程序会执行一系列操作,以准备在 GPU 上执行内核。这些设置和启动内核所必需的操作是必须为发布的每个内核支付的间接成本。对于执行时间较短的 GPU 内核,这种开销成本可能是整个端到端执行时间的很大一部分。
使用图的工作提交分为三个不同的阶段:定义、实例化和执行。
- 在定义阶段,程序创建图中操作的描述以及它们之间的依赖关系。
- 实例化获取图模板的快照,对其进行验证,并执行大部分工作的设置和初始化,目的是最大限度地减少启动时需要完成的工作。 生成的实例称为可执行图。
- 可执行图可以启动到流中,类似于任何其他 CUDA 工作。 它可以在不重复实例化的情况下启动任意次数。
3.2.6.6.1图架构
一个操作在图中形成一个节点。 操作之间的依赖关系是边。 这些依赖关系限制了操作的执行顺序。
一个操作可以在它所依赖的节点完成后随时调度。 调度由 CUDA 系统决定。
3.2.6.6.1.1 节点类型
图节点可以是以下之一:
- 核函数
- CPU函数调用
- 内存拷贝
- 内存设置
- 空节点
- 等待事件
- 记录事件
- 发出外部信号量的信号
- 等待外部信号量
- 子图:执行单独的嵌套图。 请参下图。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FwGKwKse-1676718503925)(child-graph.png)]
3.2.6.6.2利用API创建图
可以通过两种机制创建图:显式 API 和流捕获。 以下是创建和执行下图的示例。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GEK0fpwp-1676718503925)(create-a-graph.png)]
// Create the graph - it starts out empty
cudaGraphCreate(&graph, 0);
// For the purpose of this example, we'll create
// the nodes separately from the dependencies to
// demonstrate that it can be done in two stages.
// Note that dependencies can also be specified
// at node creation.
cudaGraphAddKernelNode(&a, graph, NULL, 0, &nodeParams);
cudaGraphAddKernelNode(&b, graph, NULL, 0, &nodeParams);
cudaGraphAddKernelNode(&c, graph, NULL, 0, &nodeParams);
cudaGraphAddKernelNode(&d, graph, NULL, 0, &nodeParams);
// Now set up dependencies on each node
cudaGraphAddDependencies(graph, &a, &b, 1); // A->B
cudaGraphAddDependencies(graph, &a, &c, 1); // A->C
cudaGraphAddDependencies(graph, &b, &d, 1); // B->D
cudaGraphAddDependencies(graph, &c, &d, 1); // C->D
3.2.6.6.3 使用流捕获创建图
流捕获提供了一种从现有的基于流的 API 创建图的机制。 将工作启动到流中的一段代码,包括现有代码,可以等同于用与 cudaStreamBeginCapture() 和 cudaStreamEndCapture() 的调用。
cudaGraph_t graph;
cudaStreamBeginCapture(stream);
kernel_A<<< ..., stream >>>(...);
kernel_B<<< ..., stream >>>(...);
libraryCall(stream);
kernel_C<<< ..., stream >>>(...);
cudaStreamEndCapture(stream, &graph);
对 cudaStreamBeginCapture() 的调用将流置于捕获模式。 捕获流时,启动到流中的工作不会排队执行。 相反,它被附加到正在逐步构建的内部图中。 然后通过调用 cudaStreamEndCapture() 返回此图,这也结束了流的捕获模式。 由流捕获主动构建的图称为捕获图(capture graph)。
流捕获可用于除 cudaStreamLegacy(“NULL 流”)之外的任何 CUDA 流。 请注意,它可以在 cudaStreamPerThread 上使用。 如果程序正在使用legacy stream,则可以将stream 0 重新定义为不更改功能的每线程流。 请参阅默认流。
可以使用 cudaStreamIsCapturing() 查询是否正在捕获流。
3.2.6.6.3.1 跨流依赖性和事件
流捕获可以处理用 cudaEventRecord() 和 cudaStreamWaitEvent() 表示的跨流依赖关系,前提是正在等待的事件被记录到同一个捕获图中。
当事件记录在处于捕获模式的流中时,它会导致捕获事件。捕获的事件表示捕获图中的一组节点。
当流等待捕获的事件时,如果尚未将流置于捕获模式,则它会将流置于捕获模式,并且流中的下一个项目将对捕获事件中的节点具有额外的依赖关系。然后将两个流捕获到同一个捕获图。
当流捕获中存在跨流依赖时,仍然必须在调用 cudaStreamBeginCapture() 的同一流中调用 cudaStreamEndCapture();这是原始流。由于基于事件的依赖关系,被捕获到同一捕获图的任何其他流也必须连接回原始流。如下所示。在 cudaStreamEndCapture() 时,捕获到同一捕获图的所有流都将退出捕获模式。未能重新加入原始流将导致整个捕获操作失败。
// stream1 is the origin stream
cudaStreamBeginCapture(stream1);
kernel_A<<< ..., stream1 >>>(...);
// Fork into stream2
cudaEventRecord(event1, stream1);
cudaStreamWaitEvent(stream2, event1);
kernel_B<<< ..., stream1 >>>(...);
kernel_C<<< ..., stream2 >>>(...);
// Join stream2 back to origin stream (stream1)
cudaEventRecord(event2, stream2);
cudaStreamWaitEvent(stream1, event2);
kernel_D<<< ..., stream1 >>>(...);
// End capture in the origin stream
cudaStreamEndCapture(stream1, &graph);
// stream1 and stream2 no longer in capture mode
上述代码返回的图如图 10 所示。
注意:当流退出捕获模式时,流中的下一个未捕获项(如果有)仍将依赖于最近的先前未捕获项,尽管已删除中间项。
3.2.6.6.3.2 禁止和未处理的操作
同步或查询正在捕获的流或捕获的事件的执行状态是无效的,因为它们不代表计划执行的项目。当任何关联流处于捕获模式时,查询包含活动流捕获的更广泛句柄(例如设备或上下文句柄)的执行状态或同步也是无效的。
当捕获同一上下文中的任何流时,并且它不是使用 cudaStreamNonBlocking 创建的,任何使用旧流的尝试都是无效的。这是因为legacy stream句柄始终包含这些其他流;legacy stream将创建对正在捕获的流的依赖,并且查询它或同步它会查询或同步正在捕获的流。
因此在这种情况下调用同步 API 也是无效的。同步 API,例如 cudaMemcpy(),将工作legacy stream并在返回之前对其进行同步。
注意:作为一般规则,当依赖关系将捕获的内容与未捕获的内容联系起来并排队执行时,CUDA 更喜欢返回错误而不是忽略依赖关系。将流放入或退出捕获模式时会出现异常;这切断了在模式转换之前和之后添加到流中的项目之间的依赖关系。
通过等待来自正在捕获并且与与事件不同的捕获图相关联的流中的捕获事件来合并两个单独的捕获图是无效的。等待正在捕获的流中的未捕获事件是无效的。
图中当前不支持将异步操作排入流的少量 API,如果使用正在捕获的流调用,则会返回错误,例如 cudaStreamAttachMemAsync()。
3.2.6.6.3.3失效
在流捕获期间尝试无效操作时,任何关联的捕获图都将失效。 当捕获图无效时,进一步使用正在捕获的任何流或与该图关联的捕获事件将无效并将返回错误,直到使用 cudaStreamEndCapture() 结束流捕获。 此调用将使关联的流脱离捕获模式,但也会返回错误值和 NULL 图。
3.2.6.6.4 更新实例化图
使用图的工作提交分为三个不同的阶段:定义、实例化和执行。在工作流不改变的情况下,定义和实例化的开销可以分摊到许多执行中,并且图提供了明显优于流的优势。
图是工作流的快照,包括内核、参数和依赖项,以便尽可能快速有效地重放它。在工作流发生变化的情况下,图会过时,必须进行修改。对图结构(例如拓扑或节点类型)的重大更改将需要重新实例化源图,因为必须重新应用各种与拓扑相关的优化技术。
重复实例化的成本会降低图执行带来的整体性能优势,但通常只有节点参数(例如内核参数和 cudaMemcpy 地址)发生变化,而图拓扑保持不变。对于这种情况,CUDA 提供了一种称为“图形更新”的轻量级机制,它允许就地修改某些节点参数,而无需重建整个图形。这比重新实例化要有效得多。
更新将在下次启动图时生效,因此它们不会影响以前的图启动,即使它们在更新时正在运行。一个图可能会被重复更新和重新启动,因此多个更新/启动可以在一个流上排队。
CUDA 提供了两种更新实例化图的机制,全图更新和单个节点更新。整个图更新允许用户提供一个拓扑相同的 cudaGraph_t 对象,其节点包含更新的参数。单个节点更新允许用户显式更新单个节点的参数。当大量节点被更新时,或者当调用者不知道图拓扑时(即,图是由库调用的流捕获产生的),使用更新的 cudaGraph_t 会更方便。当更改的数量很少并且用户拥有需要更新的节点的句柄时,首选使用单个节点更新。单个节点更新跳过未更改节点的拓扑检查和比较,因此在许多情况下它可以更有效。以下部分更详细地解释了每种方法。
3.2.6.6.4.1 图更新限制
内核节点:
- 函数的所属上下文不能改变。
- 其功能最初未使用 CUDA 动态并行性的节点无法更新为使用 CUDA 动态并行性的功能。
cudaMemset 和 cudaMemcpy 节点:
- 操作数分配/映射到的 CUDA 设备不能更改。
- 源/目标内存必须从与原始源/目标内存相同的上下文中分配。
- 只能更改一维 cudaMemset/cudaMemcpy 节点。
额外的 memcpy 节点限制:
- 不支持更改源或目标内存类型(即 cudaPitchedPtr、cudaArray_t 等)或传输类型(即 cudaMemcpyKind)。
外部信号量等待节点和记录节点:
- 不支持更改信号量的数量。
- 对主机节点、事件记录节点或事件等待节点的更新没有限制。
3.2.6.6.4.2全图更新
cudaGraphExecUpdate() 允许使用相同拓扑图(“更新”图)中的参数更新实例化图(“原始图”)。 更新图的拓扑必须与用于实例化 cudaGraphExec_t 的原始图相同。 此外,将节点添加到原始图或从中删除的顺序必须与将节点添加到更新图(或从中删除)的顺序相匹配。 因此,在使用流捕获时,必须以相同的顺序捕获节点,而在使用显式图形节点创建 API 时,必须以相同的顺序添加或删除所有节点。
以下示例显示了如何使用 API 更新实例化图:
cudaGraphExec_t graphExec = NULL;
for (int i = 0; i < 10; i++) {
cudaGraph_t graph;
cudaGraphExecUpdateResult updateResult;
cudaGraphNode_t errorNode;
// In this example we use stream capture to create the graph.
// You can also use the Graph API to produce a graph.
cudaStreamBeginCapture(stream, cudaStreamCaptureModeGlobal);
// Call a user-defined, stream based workload, for example
do_cuda_work(stream);
cudaStreamEndCapture(stream, &graph);
// If we've already instantiated the graph, try to update it directly
// and avoid the instantiation overhead
if (graphExec != NULL) {
// If the graph fails to update, errorNode will be set to the
// node causing the failure and updateResult will be set to a
// reason code.
cudaGraphExecUpdate(graphExec, graph, &errorNode, &updateResult);
}
// Instantiate during the first iteration or whenever the update
// fails for any reason
if (graphExec == NULL || updateResult != cudaGraphExecUpdateSuccess) {
// If a previous update failed, destroy the cudaGraphExec_t
// before re-instantiating it
if (graphExec != NULL) {
cudaGraphExecDestroy(graphExec);
}
// Instantiate graphExec from graph. The error node and
// error message parameters are unused here.
cudaGraphInstantiate(&graphExec, graph, NULL, NULL, 0);
}
cudaGraphDestroy(graph);
cudaGraphLaunch(graphExec, stream);
cudaStreamSynchronize(stream);
}
典型的工作流程是使用流捕获或图 API 创建初始 cudaGraph_t。 然后 cudaGraph_t 被实例化并正常启动。 初始启动后,使用与初始图相同的方法创建新的 cudaGraph_t,并调用 cudaGraphExecUpdate()。 如果图更新成功,由上面示例中的 updateResult 参数指示,则启动更新的 cudaGraphExec_t。 如果由于任何原因更新失败,则调用 cudaGraphExecDestroy() 和 cudaGraphInstantiate() 来销毁原始的 cudaGraphExec_t 并实例化一个新的。
也可以直接更新 cudaGraph_t 节点(即,使用 cudaGraphKernelNodeSetParams())并随后更新 cudaGraphExec_t,但是使用下一节中介绍的显式节点更新 API 会更有效。
有关使用情况和当前限制的更多信息,请参阅 Graph API。
3.2.6.6.4.3 单个节点更新
实例化的图节点参数可以直接更新。 这消除了实例化的开销以及创建新 cudaGraph_t 的开销。 如果需要更新的节点数相对于图中的总节点数较小,则最好单独更新节点。 以下方法可用于更新 cudaGraphExec_t 节点:
cudaGraphExecKernelNodeSetParams()cudaGraphExecMemcpyNodeSetParams()cudaGraphExecMemsetNodeSetParams()cudaGraphExecHostNodeSetParams()cudaGraphExecChildGraphNodeSetParams()cudaGraphExecEventRecordNodeSetEvent()cudaGraphExecEventWaitNodeSetEvent()cudaGraphExecExternalSemaphoresSignalNodeSetParams()cudaGraphExecExternalSemaphoresWaitNodeSetParams()
有关使用情况和当前限制的更多信息,请参阅 Graph API。
3.2.6.6.5 使用图API
cudaGraph_t 对象不是线程安全的。 用户有责任确保多个线程不会同时访问同一个 cudaGraph_t。
cudaGraphExec_t 不能与自身同时运行。 cudaGraphExec_t 的启动将在之前启动相同的可执行图之后进行。
图形执行在流中完成,以便与其他异步工作进行排序。 但是,流仅用于排序; 它不限制图的内部并行性,也不影响图节点的执行位置。
请参阅图API。
3.2.6.7 事件
运行时还提供了一种密切监视设备进度以及执行准确计时的方法,方法是让应用程序异步记录程序中任何点的事件,并查询这些事件何时完成。 当事件之前的所有任务(或给定流中的所有命令)都已完成时,事件已完成。 空流中的事件在所有流中的所有先前任务和命令都完成后完成。
3.2.6.7.1 创建和销毁
以下代码示例创建两个事件:
cudaEvent_t start, stop;
cudaEventCreate(&start);
cudaEventCreate(&stop);
它们以这种方式被销毁:
cudaEventDestroy(start);
cudaEventDestroy(stop);
3.2.6.7.2 计算时间
可以用以下方式来计时:
cudaEventRecord(start, 0);
for (int i = 0; i < 2; ++i) {
cudaMemcpyAsync(inputDev + i * size, inputHost + i * size,
size, cudaMemcpyHostToDevice, stream[i]);
MyKernel<<<100, 512, 0, stream[i]>>>
(outputDev + i * size, inputDev + i * size, size);
cudaMemcpyAsync(outputHost + i * size, outputDev + i * size,
size, cudaMemcpyDeviceToHost, stream[i]);
}
cudaEventRecord(stop, 0);
cudaEventSynchronize(stop);
float elapsedTime;
cudaEventElapsedTime(&elapsedTime, start, stop);
3.2.6.8同步调用
调用同步函数时,在设备完成请求的任务之前,控制不会返回给主机线程。 在主机线程执行任何其他 CUDA 调用之前,可以通过调用带有一些特定标志的 cudaSetDeviceFlags() 来指定主机线程是否会产生、阻塞或自旋(有关详细信息,请参阅参考手册)。
3.2.7 多设备系统
3.2.7.1设备枚举
一个主机系统可以有多个设备。 以下代码示例显示了如何枚举这些设备、查询它们的属性并确定启用 CUDA 的设备的数量。
int deviceCount;
cudaGetDeviceCount(&deviceCount);
int device;
for (device = 0; device < deviceCount; ++device) {
cudaDeviceProp deviceProp;
cudaGetDeviceProperties(&deviceProp, device);
printf("Device %d has compute capability %d.%d.\n",
device, deviceProp.major, deviceProp.minor);
}
3.2.7.2 设备选择
主机线程可以通过调用 cudaSetDevice()随时设置它所操作的设备。 设备内存分配和内核启动在当前设置的设备上进行; 流和事件是与当前设置的设备相关联的。 如果未调用 cudaSetDevice(),则当前设备为设备0。
以下代码示例说明了设置当前设备如何影响内存分配和内核执行。
size_t size = 1024 * sizeof(float);
cudaSetDevice(0); // Set device 0 as current
float* p0;
cudaMalloc(&p0, size); // Allocate memory on device 0
MyKernel<<<1000, 128>>>(p0); // Launch kernel on device 0
cudaSetDevice(1); // Set device 1 as current
float* p1;
cudaMalloc(&p1, size); // Allocate memory on device 1
MyKernel<<<1000, 128>>>(p1); // Launch kernel on device 1
3.2.7.3 流和事件行为
如果在与当前设备无关的流上启动内核将失败,如以下代码示例所示。
cudaSetDevice(0); // Set device 0 as current
cudaStream_t s0;
cudaStreamCreate(&s0); // Create stream s0 on device 0
MyKernel<<<100, 64, 0, s0>>>(); // Launch kernel on device 0 in s0
cudaSetDevice(1); // Set device 1 as current
cudaStream_t s1;
cudaStreamCreate(&s1); // Create stream s1 on device 1
MyKernel<<<100, 64, 0, s1>>>(); // Launch kernel on device 1 in s1
// This kernel launch will fail:
MyKernel<<<100, 64, 0, s0>>>(); // Launch kernel on device 1 in s0
即使将内存复制运行在与当前设备无关的流,它也会成功。
如果输入事件和输入流关联到不同的设备,cudaEventRecord() 将失败。
如果两个输入事件关联到不同的设备, cudaEventElapsedTime() 将失败。
即使输入事件关联到与当前设备不同的设备,cudaEventSynchronize() 和 cudaEventQuery() 也会成功。
即使输入流和输入事件关联到不同的设备,cudaStreamWaitEvent() 也会成功。 因此,cudaStreamWaitEvent()可用于使多个设备相互同步。
每个设备都有自己的默认流(请参阅默认流),因此向设备的默认流发出的命令可能会乱序执行或与向任何其他设备的默认流发出的命令同时执行。
3.2.7.4 Peer-to-Peer的内存访问
根据系统属性,特别是 PCIe 或 NVLINK 拓扑结构,设备能够相互寻址对方的内存(即,在一个设备上执行的内核可以取消引用指向另一设备内存的指针)。 如果 cudaDeviceCanAccessPeer() 为这两个设备返回 true,则在两个设备之间支持这种对等内存访问功能。
对等内存访问仅在 64 位应用程序中受支持,并且必须通过调用 cudaDeviceEnablePeerAccess() 在两个设备之间启用,如以下代码示例所示。 在未启用 NVSwitch 的系统上,每个设备最多可支持系统范围内的八个对等连接。
两个设备使用统一的地址空间(请参阅统一虚拟地址空间),因此可以使用相同的指针来寻址两个设备的内存,如下面的代码示例所示。
cudaSetDevice(0); // Set device 0 as current
float* p0;
size_t size = 1024 * sizeof(float);
cudaMalloc(&p0, size); // Allocate memory on device 0
MyKernel<<<1000, 128>>>(p0); // Launch kernel on device 0
cudaSetDevice(1); // Set device 1 as current
cudaDeviceEnablePeerAccess(0, 0); // Enable peer-to-peer access
// with device 0
// Launch kernel on device 1
// This kernel launch can access memory on device 0 at address p0
MyKernel<<<1000, 128>>>(p0);
3.2.7.4.1 Linux上的IOMMU
仅在 Linux 上,CUDA 和显示驱动程序不支持启用 IOMMU 的裸机 PCIe 对等内存复制。 但是,CUDA 和显示驱动程序确实支持通过 VM 传递的 IOMMU。 因此,Linux 上的用户在本机裸机系统上运行时,应禁用 IOMMU。 如启用 IOMMU,将 VFIO 驱动程序用作虚拟机的 PCIe 通道。
在 Windows 上,上述限制不存在。
另请参阅在 64 位平台上分配 DMA 缓冲区。
3.2.7.5 Peer-to-Peer内存拷贝
可以在两个不同设备的内存之间执行内存复制。
当两个设备使用统一地址空间时(请参阅统一虚拟地址空间),这是使用设备内存中提到的常规内存复制功能完成的。
否则,这将使用 cudaMemcpyPeer()、cudaMemcpyPeerAsync()、cudaMemcpy3DPeer() 或 cudaMemcpy3DPeerAsync() 完成,如以下代码示例所示。
cudaSetDevice(0); // Set device 0 as current
float* p0;
size_t size = 1024 * sizeof(float);
cudaMalloc(&p0, size); // Allocate memory on device 0
cudaSetDevice(1); // Set device 1 as current
float* p1;
cudaMalloc(&p1, size); // Allocate memory on device 1
cudaSetDevice(0); // Set device 0 as current
MyKernel<<<1000, 128>>>(p0); // Launch kernel on device 0
cudaSetDevice(1); // Set device 1 as current
cudaMemcpyPeer(p1, 1, p0, 0, size); // Copy p0 to p1
MyKernel<<<1000, 128>>>(p1);
两个不同设备的内存之间的拷贝(在隐式 NULL 流中):
- 直到之前向任一设备发出的所有命令都完成后才会启动,并且
- 在复制到任一设备之后发出的任何命令(请参阅异步并发执行)可以开始之前运行完成。
与流的正常行为一致,两个设备的内存之间的异步拷贝可能与另一个流中的拷贝或内核重叠。
请注意,如果通过 cudaDeviceEnablePeerAccess() 在两个设备之间启用Peer-to-Peer访问,如Peer-to-Peer内存访问中所述,这两个设备之间的Peer-to-Peer内存复制不再需要通过主机, 因此速度更快。
统一虚拟地址空间
当应用程序作为 64 位进程运行时,单个地址空间用于主机和计算能力 2.0 及更高版本的所有设备。通过 CUDA API 调用进行的所有主机内存分配以及受支持设备上的所有设备内存分配都在此虚拟地址范围内。作为结果:
- 通过 CUDA 分配的主机或使用统一地址空间的任何设备上的任何内存的位置都可以使用
cudaPointerGetAttributes()从指针的值中确定。 - 当复制到或从任何使用统一地址空间的设备的内存中复制时,可以将
cudaMemcpy*()的cudaMemcpyKind参数设置为cudaMemcpyDefault以根据指针确定位置。只要当前设备使用统一寻址,这也适用于未通过 CUDA 分配的主机指针。 - 通过
cudaHostAlloc()进行的分配可以在使用统一地址空间的所有设备之间自动移植(请参阅可移植内存),并且 cudaHostAlloc() 返回的指针可以直接在这些设备上运行的内核中使用(即,没有需要通过cudaHostGetDevicePointer()获取设备指针,如映射内存中所述。
应用程序可以通过检查 UnifiedAddressing 设备属性(请参阅设备枚举)是否等于 1 来查询统一地址空间是否用于特定设备。
3.2.9 进程间通信
由主机线程创建的任何设备内存指针或事件句柄都可以被同一进程中的任何其他线程直接引用。然而,它在这个进程之外是无效的,因此不能被属于不同进程的线程直接引用。
要跨进程共享设备内存指针和事件,应用程序必须使用进程间通信 API,参考手册中有详细描述。 IPC API 仅支持 Linux 上的 64 位进程以及计算能力 2.0 及更高版本的设备。请注意,cudaMallocManaged 分配不支持 IPC API。
使用此 API,应用程序可以使用 cudaIpcGetMemHandle() 获取给定设备内存指针的 IPC 句柄,使用标准 IPC 机制(例如,进程间共享内存或文件)将其传递给另一个进程,并使用 cudaIpcOpenMemHandle() 检索设备来自 IPC 句柄的指针,该指针是其他进程中的有效指针。可以使用类似的入口点共享事件句柄。
请注意,出于性能原因,由 cudaMalloc() 进行的分配可能会从更大的内存块中进行子分配。在这种情况下,CUDA IPC API 将共享整个底层内存块,这可能导致其他子分配被共享,这可能导致进程之间的信息泄露。为了防止这种行为,建议仅共享具有 2MiB 对齐大小的分配。
使用 IPC API 的一个示例是单个主进程生成一批输入数据,使数据可用于多个辅助进程,而无需重新生成或复制。
使用 CUDA IPC 相互通信的应用程序应使用相同的 CUDA 驱动程序和运行时进行编译、链接和运行。
注意:自 CUDA 11.5 起,L4T 和具有计算能力 7.x 及更高版本的嵌入式 Linux Tegra 设备仅支持事件共享 IPC API。 Tegra 平台仍然不支持内存共享 IPC API。
3.2.10 错误检查
所有运行时函数都返回错误代码,但对于异步函数(请参阅异步并发执行),此错误代码不可能报告任何可能发生在设备上的异步错误,因为函数在设备完成任务之前返回;错误代码仅报告执行任务之前主机上发生的错误,通常与参数验证有关;如果发生异步错误,会被后续一些不相关的运行时函数调用报告。
因此,在某些异步函数调用之后检查异步错误的唯一方法是在调用之后通过调用 cudaDeviceSynchronize()(或使用异步并发执行中描述的任何其他同步机制)并检查 cudaDeviceSynchronize()。
运行时为每个初始化为 cudaSuccess 的主机线程维护一个错误变量,并在每次发生错误时被错误代码覆盖(无论是参数验证错误还是异步错误)。 cudaPeekAtLastError() 返回此变量。 cudaGetLastError() 返回此变量并将其重置为 cudaSuccess。
内核启动不返回任何错误代码,因此必须在内核启动后立即调用 cudaPeekAtLastError() 或 cudaGetLastError() 以检索任何启动前错误。为了确保 cudaPeekAtLastError() 或 cudaGetLastError() 返回的任何错误不是源自内核启动之前的调用,必须确保在内核启动之前将运行时错误变量设置为 cudaSuccess,例如,通过调用cudaGetLastError() 在内核启动之前。内核启动是异步的,因此要检查异步错误,应用程序必须在内核启动和调用 cudaPeekAtLastError() 或 cudaGetLastError() 之间进行同步。
请注意,cudaStreamQuery() 和 cudaEventQuery() 可能返回的 cudaErrorNotReady 不被视为错误,因此 cudaPeekAtLastError() 或 cudaGetLastError() 不会报告。
3.2.11 调用栈
在计算能力 2.x 及更高版本的设备上,调用堆栈的大小可以使用 cudaDeviceGetLimit() 查询并使用 cudaDeviceSetLimit() 设置。
当调用堆栈溢出时,如果应用程序通过 CUDA 调试器(cuda-gdb、Nsight)运行,内核调用将失败并出现堆栈溢出错误,否则会出现未指定的启动错误。
3.2.12 纹理内存和表面内存(surface memory)
CUDA 支持 GPU 用于图形访问纹理和表面内存的纹理硬件子集。 如设备内存访问中所述,从纹理或表面内存而不是全局内存读取数据可以带来多项性能优势。
有两种不同的 API 可以访问纹理和表面内存:
- 所有设备都支持的纹理引用 API,
- 仅在计算能力 3.x 及更高版本的设备上支持的纹理对象 API。
纹理引用 API 具有纹理对象 API 没有的限制。 它们在 [[DEPRECATED]] 纹理引用 API 中被提及。
3.2.12.1纹理内存
使用纹理函数中描述的设备函数从内核读取纹理内存。 调用这些函数之一读取纹理的过程称为纹理提取。 每个纹理提取指定一个参数,称为纹理对象 API 的纹理对象或纹理引用 API 的纹理引用。
纹理对象或纹理引用指定:
-
纹理,即提取的纹理内存。 纹理对象在运行时创建,并在创建纹理对象时指定纹理,如纹理对象 API 中所述。 纹理引用是在编译时创建的,纹理是在运行时通过 [[DEPRECATED]] Texture Reference API 中描述的运行时函数将纹理引用绑定到纹理来指定的; 几个不同的纹理引用可能绑定到相同的纹理或内存中重叠的纹理。 纹理可以是线性内存的任何区域或 CUDA 数组(在 CUDA 数组中描述)。
-
它的维数指定纹理是使用一个纹理坐标的一维数组、使用两个纹理坐标的二维数组还是使用三个纹理坐标的三维数组。数组的元素称为
texels,是纹理元素的缩写。纹理的宽度、高度和深度是指数组在每个维度上的大小。表 15 列出了取决于设备计算能力的最大纹理宽度、高度和深度。 -
texels的类型,仅限于基本整数和单精度浮点类型以及从基本向量类型派生的内置向量类型中定义的任何 1、2 和 4 分量向量类型整数和单精度浮点类型。 -
读取模式,等同于
cudaReadModeNormalizedFloat或cudaReadModeElementType。如果是cudaReadModeNormalizedFloat并且 texel 的类型是 16 位或 8 位整数类型,则纹理获取返回的值实际上是作为浮点类型返回的,并且整数类型的全范围映射到 [0.0 , 1.0] 表示无符号整数类型,[-1.0, 1.0] 表示有符号整数类型;例如,值为 0xff 的无符号 8 位纹理元素读取为 1。如果是cudaReadModeElementType,则不执行转换。 -
纹理坐标是否标准化。默认情况下,使用 [0, N-1] 范围内的浮点坐标(通过 Texture Functions 的函数)引用纹理,其中 N 是与坐标对应的维度中纹理的大小。例如,大小为 64x32 的纹理将分别使用 x 和 y 维度的 [0, 63] 和 [0, 31] 范围内的坐标进行引用。标准化纹理坐标导致坐标被指定在[0.0,1.0-1/N]范围内,而不是[0,N-1],所以相同的64x32纹理将在x和y维度的[0,1 -1/N]范围内被标准化坐标定位。如果纹理坐标独立于纹理大小,则归一化纹理坐标自然适合某些应用程序的要求。
-
寻址方式。使用超出范围的坐标调用 B.8 节的设备函数是有效的。寻址模式定义了在这种情况下会发生什么。默认寻址模式是将坐标限制在有效范围内:[0, N) 用于非归一化坐标,[0.0, 1.0) 用于归一化坐标。如果指定了边框模式,则纹理坐标超出范围的纹理提取将返回零。对于归一化坐标,还可以使用环绕模式和镜像模式。使用环绕模式时,每个坐标 x 都转换为 frac(x)=x - floor(x),其中 floor(x) 是不大于 x 的最大整数。使用镜像模式时,如果 floor(x) 为偶数,则每个坐标 x 转换为 frac(x),如果 floor(x) 为奇数,则转换为 1-frac(x)。寻址模式被指定为一个大小为 3 的数组,其第一个、第二个和第三个元素分别指定第一个、第二个和第三个纹理坐标的寻址模式;寻址模式为
cudaAddressModeBorder、cudaAddressModeClamp、cudaAddressModeWrap和cudaAddressModeMirror;cudaAddressModeWrap和cudaAddressModeMirror仅支持标准化纹理坐标 -
过滤模式指定如何根据输入纹理坐标计算获取纹理时返回的值。线性纹理过滤只能对配置为返回浮点数据的纹理进行。它在相邻纹素之间执行低精度插值。启用后,将读取纹理提取位置周围的
texels,并根据纹理坐标落在texels之间的位置对纹理提取的返回值进行插值。对一维纹理进行简单线性插值,对二维纹理进行双线性插值,对三维纹理进行三线性插值。 Texture Fetching 提供了有关纹理获取的更多细节。过滤模式等于cudaFilterModePoint或cudaFilterModeLinear。如果是cudaFilterModePoint,则返回值是纹理坐标最接近输入纹理坐标的texel。如果是cudaFilterModeLinear,则返回值是纹理坐标最接近的两个(一维纹理)、四个(二维纹理)或八个(三维纹理)texel的线性插值输入纹理坐标。cudaFilterModeLinear仅对浮点类型的返回值有效。
纹理对象 API 。
[[DEPRECATED]] Texture Reference API
16位浮点纹理解释了如何处理16位浮点纹理。
纹理也可以分层,如分层纹理中所述。
立方体贴图纹理和立方体贴图分层纹理描述了一种特殊类型的纹理,立方体贴图纹理。
Texture Gather 描述了一种特殊的纹理获取,纹理收集。
3.2.12.1.1 纹理对象API
使用 cudaCreateTextureObject() 从指定纹理的 struct cudaResourceDesc 类型的资源描述和定义如下的纹理描述创建纹理对象:
struct cudaTextureDesc
{
enum cudaTextureAddressMode addressMode[3];
enum cudaTextureFilterMode filterMode;
enum cudaTextureReadMode readMode;
int sRGB;
int normalizedCoords;
unsigned int maxAnisotropy;
enum cudaTextureFilterMode mipmapFilterMode;
float mipmapLevelBias;
float minMipmapLevelClamp;
float maxMipmapLevelClamp;
};
addressMode指定寻址模式;filterMode指定过滤模式;readMode指定读取模式;normalizedCoords指定纹理坐标是否被归一化;sRGB、maxAnisotropy、mipmapFilterMode、mipmapLevelBias、minMipmapLevelClamp和maxMipmapLevelClamp请参阅的参考手册。
以下代码示例将一些简单的转换内核应用于纹理。
// Simple transformation kernel
__global__ void transformKernel(float* output,
cudaTextureObject_t texObj,
int width, int height,
float theta)
{
// Calculate normalized texture coordinates
unsigned int x = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y * blockDim.y + threadIdx.y;
float u = x / (float)width;
float v = y / (float)height;
// Transform coordinates
u -= 0.5f;
v -= 0.5f;
float tu = u * cosf(theta) - v * sinf(theta) + 0.5f;
float tv = v * cosf(theta) + u * sinf(theta) + 0.5f;
// Read from texture and write to global memory
output[y * width + x] = tex2D<float>(texObj, tu, tv);
}
// Host code
int main()
{
const int height = 1024;
const int width = 1024;
float angle = 0.5;
// Allocate and set some host data
float *h_data = (float *)std::malloc(sizeof(float) * width * height);
for (int i = 0; i < height * width; ++i)
h_data[i] = i;
// Allocate CUDA array in device memory
cudaChannelFormatDesc channelDesc =
cudaCreateChannelDesc(32, 0, 0, 0, cudaChannelFormatKindFloat);
cudaArray_t cuArray;
cudaMallocArray(&cuArray, &channelDesc, width, height);
// Set pitch of the source (the width in memory in bytes of the 2D array pointed
// to by src, including padding), we dont have any padding
const size_t spitch = width * sizeof(float);
// Copy data located at address h_data in host memory to device memory
cudaMemcpy2DToArray(cuArray, 0, 0, h_data, spitch, width * sizeof(float),
height, cudaMemcpyHostToDevice);
// Specify texture
struct cudaResourceDesc resDesc;
memset(&resDesc, 0, sizeof(resDesc));
resDesc.resType = cudaResourceTypeArray;
resDesc.res.array.array = cuArray;
// Specify texture object parameters
struct cudaTextureDesc texDesc;
memset(&texDesc, 0, sizeof(texDesc));
texDesc.addressMode[0] = cudaAddressModeWrap;
texDesc.addressMode[1] = cudaAddressModeWrap;
texDesc.filterMode = cudaFilterModeLinear;
texDesc.readMode = cudaReadModeElementType;
texDesc.normalizedCoords = 1;
// Create texture object
cudaTextureObject_t texObj = 0;
cudaCreateTextureObject(&texObj, &resDesc, &texDesc, NULL);
// Allocate result of transformation in device memory
float *output;
cudaMalloc(&output, width * height * sizeof(float));
// Invoke kernel
dim3 threadsperBlock(16, 16);
dim3 numBlocks((width + threadsperBlock.x - 1) / threadsperBlock.x,
(height + threadsperBlock.y - 1) / threadsperBlock.y);
transformKernel<<<numBlocks, threadsperBlock>>>(output, texObj, width, height,
angle);
// Copy data from device back to host
cudaMemcpy(h_data, output, width * height * sizeof(float),
cudaMemcpyDeviceToHost);
// Destroy texture object
cudaDestroyTextureObject(texObj);
// Free device memory
cudaFreeArray(cuArray);
cudaFree(output);
// Free host memory
free(h_data);
return 0;
}
3.2.12.1.2 [[已弃用]] 纹理引用 API
纹理参考 API 已弃用。
纹理引用的某些属性是不可变的,必须在编译时知道; 它们是在声明纹理引用时指定的。 纹理引用在文件范围内声明为纹理类型的变量:
texture<DataType, Type, ReadMode> texRef;
DataType指定纹素的类型;Type指定纹理参考的类型,等于cudaTextureType1D、cudaTextureType2D或cudaTextureType3D,分别用于一维、二维或三维纹理,或cudaTextureType1DLayered或cudaTextureType2DLayered用于一维或二维 分别分层纹理;Type是一个可选参数,默认为cudaTextureType1D;ReadMode指定读取模式; 它是一个可选参数,默认为cudaReadModeElementType。
纹理引用只能声明为静态全局变量,不能作为参数传递给函数。
纹理引用的其他属性是可变的,并且可以在运行时通过主机运行时进行更改。 如参考手册中所述,运行时 API 具有低级 C 样式接口和高级 C++ 样式接口。 纹理类型在高级 API 中定义为公开派生自低级 API 中定义的 textureReference 类型的结构,如下所示:
struct textureReference {
int normalized;
enum cudaTextureFilterMode filterMode;
enum cudaTextureAddressMode addressMode[3];
struct cudaChannelFormatDesc channelDesc;
int sRGB;
unsigned int maxAnisotropy;
enum cudaTextureFilterMode mipmapFilterMode;
float mipmapLevelBias;
float minMipmapLevelClamp;
float maxMipmapLevelClamp;
}
normalized指定纹理坐标是否被归一化;filterMode指定过滤模式;addressMode指定寻址模式;channelDesc描述了texel的格式; 它必须匹配纹理引用声明的DataType参数;channelDesc属于以下类型:
struct cudaChannelFormatDesc {
int x, y, z, w;
enum cudaChannelFormatKind f;
};
其中 x、y、z 和 w 等于返回值的每个分量的位数,f 为:
*cudaChannelFormatKindSigned 如果这些组件是有符号整数类型,
*cudaChannelFormatKindUnsigned 如果它们是无符号整数类型,
*cudaChannelFormatKindFloat 如果它们是浮点类型。
sRGB、maxAnisotropy、mipmapFilterMode、mipmapLevelBias、minMipmapLevelClamp 和 maxMipmapLevelClamp请参阅参考手册
normalized、addressMode 和 filterMode 可以直接在主机代码中修改。
在纹理内存中读取之前内核可以使用纹理引用,纹理引用必须绑定到纹理,使用 cudaBindTexture() 或 cudaBindTexture2D() 用于线性内存,或 cudaBindTextureToArray() 用于 CUDA 数组。 cudaUnbindTexture() 用于取消绑定纹理引用。 一旦纹理引用被解除绑定,它可以安全地重新绑定到另一个数组,即使使用之前绑定的纹理的内核还没有完成。 建议使用 cudaMallocPitch() 在线性内存中分配二维纹理,并使用 cudaMallocPitch() 返回的间距作为 cudaBindTexture2D() 的输入参数。
以下代码示例将 2D 纹理引用绑定到 devPtr 指向的线性内存:
- 使用低层次API:
texture<float, cudaTextureType2D,
cudaReadModeElementType> texRef;
textureReference* texRefPtr;
cudaGetTextureReference(&texRefPtr, &texRef);
cudaChannelFormatDesc channelDesc =
cudaCreateChannelDesc<float>();
size_t offset;
cudaBindTexture2D(&offset, texRefPtr, devPtr, &channelDesc,
width, height, pitch);
- 使用高层次API:
texture<float, cudaTextureType2D,
cudaReadModeElementType> texRef;
cudaChannelFormatDesc channelDesc =
cudaCreateChannelDesc<float>();
size_t offset;
cudaBindTexture2D(&offset, texRef, devPtr, channelDesc,
width, height, pitch);
以下代码示例将 2D 纹理引用绑定到 CUDA 数组 cuArray:
- 使用低层次API:
texture<float, cudaTextureType2D,
cudaReadModeElementType> texRef;
textureReference* texRefPtr;
cudaGetTextureReference(&texRefPtr, &texRef);
cudaChannelFormatDesc channelDesc;
cudaGetChannelDesc(&channelDesc, cuArray);
cudaBindTextureToArray(texRef, cuArray, &channelDesc);
- 使用高层次API:
texture<float, cudaTextureType2D,
cudaReadModeElementType> texRef;
cudaBindTextureToArray(texRef, cuArray);
将纹理绑定到纹理引用时指定的格式必须与声明纹理引用时指定的参数匹配; 否则,纹理提取的结果是未定义的。
如表 15 中指定的,可以绑定到内核的纹理数量是有限的。
以下代码示例将一些简单的转换内核应用于纹理。
// 2D float texture
texture<float, cudaTextureType2D, cudaReadModeElementType> texRef;
// Simple transformation kernel
__global__ void transformKernel(float* output,
int width, int height,
float theta)
{
// Calculate normalized texture coordinates
unsigned int x = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y * blockDim.y + threadIdx.y;
float u = x / (float)width;
float v = y / (float)height;
// Transform coordinates
u -= 0.5f;
v -= 0.5f;
float tu = u * cosf(theta) - v * sinf(theta) + 0.5f;
float tv = v * cosf(theta) + u * sinf(theta) + 0.5f;
// Read from texture and write to global memory
output[y * width + x] = tex2D(texRef, tu, tv);
}
// Host code
int main()
{
// Allocate CUDA array in device memory
cudaChannelFormatDesc channelDesc =
cudaCreateChannelDesc(32, 0, 0, 0,
cudaChannelFormatKindFloat);
cudaArray* cuArray;
cudaMallocArray(&cuArray, &channelDesc, width, height);
// Copy to device memory some data located at address h_data
// in host memory
cudaMemcpyToArray(cuArray, 0, 0, h_data, size,
cudaMemcpyHostToDevice);
// Set texture reference parameters
texRef.addressMode[0] = cudaAddressModeWrap;
texRef.addressMode[1] = cudaAddressModeWrap;
texRef.filterMode = cudaFilterModeLinear;
texRef.normalized = true;
// Bind the array to the texture reference
cudaBindTextureToArray(texRef, cuArray, channelDesc);
// Allocate result of transformation in device memory
float* output;
cudaMalloc(&output, width * height * sizeof(float));
// Invoke kernel
dim3 dimBlock(16, 16);
dim3 dimGrid((width + dimBlock.x - 1) / dimBlock.x,
(height + dimBlock.y - 1) / dimBlock.y);
transformKernel<<<dimGrid, dimBlock>>>(output, width, height,
angle);
// Free device memory
cudaFreeArray(cuArray);
cudaFree(output);
return 0;
}
3.2.12.1.3 16位浮点类型纹理
CUDA 数组支持的 16 位浮点或 half 格式与 IEEE 754-2008 binary2 格式相同。
CUDA C++ 不支持匹配的数据类型,但提供了通过 unsigned short 类型与 32 位浮点格式相互转换的内在函数:__float2half_rn(float) 和 __half2float(unsigned short)。 这些功能仅在设备代码中受支持。 例如,主机代码的等效函数可以在 OpenEXR 库中找到。
在执行任何过滤之前,在纹理提取期间,16 位浮点组件被提升为 32 位浮点。
可以通过调用 cudaCreateChannelDescHalf*() 函数来创建 16 位浮点格式的通道描述。
3.2.12.1.4 分层纹理
一维或二维分层纹理(在 Direct3D 中也称为纹理数组,在 OpenGL 中也称为数组纹理)是由一系列层组成的纹理,这些层都是具有相同维度、大小和数据类型的常规纹理.
使用整数索引和浮点纹理坐标来寻址一维分层纹理;索引表示序列中的层,坐标表示该层中的texel。使用整数索引和两个浮点纹理坐标来寻址二维分层纹理;索引表示序列中的层,坐标表示该层中的texel 。
分层纹理只能是一个 CUDA 数组,方法是使用 cudaArrayLayered 标志调用的cudaMalloc3DArray()(一维分层纹理的高度为零)。
使用 tex1DLayered()、tex1DLayered()、tex2DLayered() 和 tex2DLayered() 中描述的设备函数获取分层纹理。纹理过滤(请参阅纹理提取)仅在层内完成,而不是跨层。
分层纹理仅在计算能力 2.0 及更高版本的设备上受支持。
3.2.12.1.5 立方体纹理(Cubemap Textures)
Cubemap Textures是一种特殊类型的二维分层纹理,它有六层代表立方体的面:
- 层的宽度等于它的高度。
- 立方体贴图使用三个纹理坐标 x、y 和 z 进行寻址,这些坐标被解释为从立方体中心发出并指向立方体的一个面和对应于该面的层内的texel的方向矢量。 更具体地说,面部是由具有最大量级 m 的坐标选择的,相应的层使用坐标
(s/m+1)/2和(t/m+1)/2来寻址,其中 s 和 t 在表中定义 .
| face | m | s | t | ||
|---|---|---|---|---|---|
| |x| > |y| and |x| > |z| | x > 0 | 0 | x | -z | -y |
| |x| > |y| and |x| > |z| | x < 0 | 1 | -x | z | -y |
| |y| > |x| and |y| > |z| | y > 0 | 2 | y | x | z |
| |y| > |x| and |y| > |z| | y < 0 | 3 | -y | x | -z |
| |z| > |x| and |z| > |y| | z > 0 | 4 | z | x | -y |
| |z| > |x| and |z| > |y| | z < 0 | 5 | -z | -x | -y |
通过使用 cudaArrayCubemap 标志调用 cudaMalloc3DArray(),立方体贴图纹理只能是 CUDA 数组。
立方体贴图纹理是使用 texCubemap()和 texCubemap() 中描述的设备函数获取的。
Cubemap 纹理仅在计算能力 2.0 及更高版本的设备上受支持。
3.2.12.1.6 分层的立方体纹理内存(Cubemap Layered Textures)
立方体贴图分层纹理是一种分层纹理,其层是相同维度的立方体贴图。
使用整数索引和三个浮点纹理坐标来处理立方体贴图分层纹理; 索引表示序列中的立方体贴图,坐标表示该立方体贴图中的纹理元素。
通过使用 cudaArrayLayered 和 cudaArrayCubemap 标志调用的 cudaMalloc3DArray(),立方体贴图分层纹理只能是 CUDA 数组。
立方体贴图分层纹理是使用 texCubemapLayered() 和 texCubemapLayered() 中描述的设备函数获取的。 纹理过滤(请参阅纹理提取)仅在层内完成,而不是跨层。
Cubemap 分层纹理仅在计算能力 2.0 及更高版本的设备上受支持。
3.2.12.1.7 纹理收集(Texture Gather)
纹理聚集是一种特殊的纹理提取,仅适用于二维纹理。它由 tex2Dgather() 函数执行,该函数具有与 tex2D() 相同的参数,外加一个等于 0、1、2 或 3 的附加 comp 参数(参见 tex2Dgather() 和 tex2Dgather())。它返回四个 32 位数字,对应于在常规纹理提取期间用于双线性过滤的四个texel中每一个的分量 comp 的值。例如,如果这些纹理像素的值是 (253, 20, 31, 255), (250, 25, 29, 254), (249, 16, 37, 253), (251, 22, 30, 250),并且comp 为 2,tex2Dgather() 返回 (31, 29, 37, 30)。
请注意,纹理坐标仅使用 8 位小数精度计算。因此,对于 tex2D() 将使用 1.0 作为其权重之一(α 或 β,请参阅线性过滤)的情况,tex2Dgather() 可能会返回意外结果。例如,x 纹理坐标为 2.49805:xB=x-0.5=1.99805,但是 xB 的小数部分以 8 位定点格式存储。由于 0.99805 比 255.f/256.f 更接近 256.f/256.f,因此 xB 的值为 2。因此,在这种情况下,tex2Dgather() 将返回 x 中的索引 2 和 3,而不是索引1 和 2。
纹理收集仅支持使用 cudaArrayTextureGather 标志创建的 CUDA 数组,其宽度和高度小于表 15 中为纹理收集指定的最大值,该最大值小于常规纹理提取。
纹理收集仅在计算能力 2.0 及更高版本的设备上受支持。
3.2.12.2 表面内存(Surface Memory)
对于计算能力 2.0 及更高版本的设备,可以使用 Surface Functions 中描述的函数通过表面对象或表面引用来读取和写入使用 cudaArraySurfaceLoadStore 标志创建的 CUDA 数组(在 Cubemap Surfaces 中描述)。
表 15 列出了最大表面宽度、高度和深度,具体取决于设备的计算能力。
3.2.12.2.1 表面内存对象API
使用 cudaCreateSurfaceObject() 从 struct cudaResourceDesc 类型的资源描述中创建表面内存对象。
以下代码示例将一些简单的转换内核应用于纹理。
// Simple copy kernel
__global__ void copyKernel(cudaSurfaceObject_t inputSurfObj,
cudaSurfaceObject_t outputSurfObj,
int width, int height)
{
// Calculate surface coordinates
unsigned int x = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y * blockDim.y + threadIdx.y;
if (x < width && y < height) {
uchar4 data;
// Read from input surface
surf2Dread(&data, inputSurfObj, x * 4, y);
// Write to output surface
surf2Dwrite(data, outputSurfObj, x * 4, y);
}
}
// Host code
int main()
{
const int height = 1024;
const int width = 1024;
// Allocate and set some host data
unsigned char *h_data =
(unsigned char *)std::malloc(sizeof(unsigned char) * width * height * 4);
for (int i = 0; i < height * width * 4; ++i)
h_data[i] = i;
// Allocate CUDA arrays in device memory
cudaChannelFormatDesc channelDesc =
cudaCreateChannelDesc(8, 8, 8, 8, cudaChannelFormatKindUnsigned);
cudaArray_t cuInputArray;
cudaMallocArray(&cuInputArray, &channelDesc, width, height,
cudaArraySurfaceLoadStore);
cudaArray_t cuOutputArray;
cudaMallocArray(&cuOutputArray, &channelDesc, width, height,
cudaArraySurfaceLoadStore);
// Set pitch of the source (the width in memory in bytes of the 2D array
// pointed to by src, including padding), we dont have any padding
const size_t spitch = 4 * width * sizeof(unsigned char);
// Copy data located at address h_data in host memory to device memory
cudaMemcpy2DToArray(cuInputArray, 0, 0, h_data, spitch,
4 * width * sizeof(unsigned char), height,
cudaMemcpyHostToDevice);
// Specify surface
struct cudaResourceDesc resDesc;
memset(&resDesc, 0, sizeof(resDesc));
resDesc.resType = cudaResourceTypeArray;
// Create the surface objects
resDesc.res.array.array = cuInputArray;
cudaSurfaceObject_t inputSurfObj = 0;
cudaCreateSurfaceObject(&inputSurfObj, &resDesc);
resDesc.res.array.array = cuOutputArray;
cudaSurfaceObject_t outputSurfObj = 0;
cudaCreateSurfaceObject(&outputSurfObj, &resDesc);
// Invoke kernel
dim3 threadsperBlock(16, 16);
dim3 numBlocks((width + threadsperBlock.x - 1) / threadsperBlock.x,
(height + threadsperBlock.y - 1) / threadsperBlock.y);
copyKernel<<<numBlocks, threadsperBlock>>>(inputSurfObj, outputSurfObj, width,
height);
// Copy data from device back to host
cudaMemcpy2DFromArray(h_data, spitch, cuOutputArray, 0, 0,
4 * width * sizeof(unsigned char), height,
cudaMemcpyDeviceToHost);
// Destroy surface objects
cudaDestroySurfaceObject(inputSurfObj);
cudaDestroySurfaceObject(outputSurfObj);
// Free device memory
cudaFreeArray(cuInputArray);
cudaFreeArray(cuOutputArray);
// Free host memory
free(h_data);
return 0;
}
3.2.12.2.3 立方体表面内存
使用 surfCubemapread() 和 surfCubemapwrite()(surfCubemapread 和 surfCubemapwrite)作为二维分层表面来访问立方体贴图表面内存,即,使用表示面的整数索引和寻址对应于该面的层内的纹素的两个浮点纹理坐标 . 面的顺序如表 2所示。
3.2.12.2.4 立方体分层表面内存
使用 surfCubemapLayeredread() 和 surfCubemapLayeredwrite()(surfCubemapLayeredread() 和 surfCubemapLayeredwrite())作为二维分层表面来访问立方体贴图分层表面,即,使用表示立方体贴图之一的面和两个浮点纹理的整数索引 坐标寻址对应于该面的层内的纹理元素。 面的顺序如表 2 所示,因此例如 index ((2 * 6) + 3) 会访问第三个立方体贴图的第四个面。
3.2.12.3 CUDA Array
CUDA Array是针对纹理获取优化的不透明内存布局。 它们是一维、二维或三维,由元素组成,每个元素有 1、2 或 4 个分量,可以是有符号或无符号 8 位、16 位或 32 位整数、16 位浮点数、 或 32 位浮点数。 CUDA Array只能由内核通过纹理内存中描述的纹理获取或表面内存中描述的表面读取和写入来访问。
3.2.12.4 读写一致性
纹理和表面内存被缓存(请参阅设备内存访问),并且在同一个内核调用中,缓存在全局内存写入和表面内存写入方面并不保持一致,因此任何纹理获取或表面内存读取到一个地址 ,在同一个内核调用中通过全局写入或表面写入写入会返回未定义的数据。 换句话说,线程可以安全地读取某个纹理或表面内存位置,前提是该内存位置已被先前的内核调用或内存拷贝更新,但如果它先前已由同一个线程或来自同一线程的另一个线程更新,则不能内核调用。
3.2.13图形一致性
来自 OpenGL 和 Direct3D 的一些资源可能会映射到 CUDA 的地址空间中,以使 CUDA 能够读取 OpenGL 或 Direct3D 写入的数据,或者使 CUDA 能够写入数据以供 OpenGL 或 Direct3D 使用。
资源必须先注册到 CUDA,然后才能使用 OpenGL 互操作和 Direct3D 互操作中提到的函数进行映射。这些函数返回一个指向 struct cudaGraphicsResource 类型的 CUDA 图形资源的指针。注册资源可能会产生高开销,因此通常每个资源只调用一次。使用 cudaGraphicsUnregisterResource() 取消注册 CUDA 图形资源。每个打算使用该资源的 CUDA 上下文都需要单独注册它。
将资源注册到 CUDA 后,可以根据需要使用 cudaGraphicsMapResources() 和 cudaGraphicsUnmapResources() 多次映射和取消映射。可以调用 cudaGraphicsResourceSetMapFlags() 来指定 CUDA 驱动程序可以用来优化资源管理的使用提示(只写、只读)。
内核可以使用 cudaGraphicsResourceGetMappedPointer() 返回的设备内存地址来读取或写入映射的资源,对于缓冲区,使用 cudaGraphicsSubResourceGetMappedArray() 的 CUDA 数组。
在映射时通过 OpenGL、Direct3D 或其他 CUDA 上下文访问资源会产生未定义的结果。 OpenGL 互操作和 Direct3D 互操作为每个图形 API 和一些代码示例提供了细节。 SLI 互操作给出了系统何时处于 SLI 模式的细节。
3.2.13.1. OpenGL 一致性
可以映射到 CUDA 地址空间的 OpenGL 资源是 OpenGL 缓冲区、纹理和渲染缓冲区对象。
使用 cudaGraphicsGLRegisterBuffer() 注册缓冲区对象。在 CUDA 中,它显示为设备指针,因此可以由内核或通过 cudaMemcpy() 调用读取和写入。
使用 cudaGraphicsGLRegisterImage() 注册纹理或渲染缓冲区对象。在 CUDA 中,它显示为 CUDA 数组。内核可以通过将数组绑定到纹理或表面引用来读取数组。如果资源已使用 cudaGraphicsRegisterFlagsSurfaceLoadStore 标志注册,他们还可以通过表面写入函数对其进行写入。该数组也可以通过 cudaMemcpy2D() 调用来读取和写入。 cudaGraphicsGLRegisterImage() 支持具有 1、2 或 4 个分量和内部浮点类型(例如,GL_RGBA_FLOAT32)、标准化整数(例如,GL_RGBA8、GL_INTENSITY16)和非标准化整数(例如,GL_RGBA8UI)的所有纹理格式(请注意,由于非标准化整数格式需要 OpenGL 3.0,它们只能由着色器编写,而不是固定函数管道)。
正在共享资源的 OpenGL 上下文对于进行任何 OpenGL 互操作性 API 调用的主机线程来说必须是最新的。
请注意:当 OpenGL 纹理设置为无绑定时(例如,通过使用 glGetTextureHandle*/glGetImageHandle* API 请求图像或纹理句柄),它不能在 CUDA 中注册。应用程序需要在请求图像或纹理句柄之前注册纹理以进行互操作。
以下代码示例使用内核动态修改存储在顶点缓冲区对象中的 2D width x height 网格:
GLuint positionsVBO;
struct cudaGraphicsResource* positionsVBO_CUDA;
int main()
{
// Initialize OpenGL and GLUT for device 0
// and make the OpenGL context current
...
glutDisplayFunc(display);
// Explicitly set device 0
cudaSetDevice(0);
// Create buffer object and register it with CUDA
glGenBuffers(1, &positionsVBO);
glBindBuffer(GL_ARRAY_BUFFER, positionsVBO);
unsigned int size = width * height * 4 * sizeof(float);
glBufferData(GL_ARRAY_BUFFER, size, 0, GL_DYNAMIC_DRAW);
glBindBuffer(GL_ARRAY_BUFFER, 0);
cudaGraphicsGLRegisterBuffer(&positionsVBO_CUDA,
positionsVBO,
cudaGraphicsMapFlagsWriteDiscard);
// Launch rendering loop
glutMainLoop();
...
}
void display()
{
// Map buffer object for writing from CUDA
float4* positions;
cudaGraphicsMapResources(1, &positionsVBO_CUDA, 0);
size_t num_bytes;
cudaGraphicsResourceGetMappedPointer((void**)&positions,
&num_bytes,
positionsVBO_CUDA));
// Execute kernel
dim3 dimBlock(16, 16, 1);
dim3 dimGrid(width / dimBlock.x, height / dimBlock.y, 1);
createVertices<<<dimGrid, dimBlock>>>(positions, time,
width, height);
// Unmap buffer object
cudaGraphicsUnmapResources(1, &positionsVBO_CUDA, 0);
// Render from buffer object
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glBindBuffer(GL_ARRAY_BUFFER, positionsVBO);
glVertexPointer(4, GL_FLOAT, 0, 0);
glEnableClientState(GL_VERTEX_ARRAY);
glDrawArrays(GL_POINTS, 0, width * height);
glDisableClientState(GL_VERTEX_ARRAY);
// Swap buffers
glutSwapBuffers();
glutPostRedisplay();
}
void deleteVBO()
{
cudaGraphicsUnregisterResource(positionsVBO_CUDA);
glDeleteBuffers(1, &positionsVBO);
}
__global__ void createVertices(float4* positions, float time,
unsigned int width, unsigned int height)
{
unsigned int x = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y * blockDim.y + threadIdx.y;
// Calculate uv coordinates
float u = x / (float)width;
float v = y / (float)height;
u = u * 2.0f - 1.0f;
v = v * 2.0f - 1.0f;
// calculate simple sine wave pattern
float freq = 4.0f;
float w = sinf(u * freq + time)
* cosf(v * freq + time) * 0.5f;
// Write positions
positions[y * width + x] = make_float4(u, w, v, 1.0f);
}
在 Windows 和 Quadro GPU 上,cudaWGLGetDevice() 可用于检索与 wglEnumGpusNV() 返回的句柄关联的 CUDA 设备。 Quadro GPU 在多 GPU 配置中提供比 GeForce 和 Tesla GPU 更高性能的 OpenGL 互操作性,其中 OpenGL 渲染在 Quadro GPU 上执行,CUDA 计算在系统中的其他 GPU 上执行。
3.2.13.2. Direct3D 一致性
Direct3D 9Ex、Direct3D 10 和 Direct3D 11 支持 Direct3D 互操作性。
CUDA 上下文只能与满足以下条件的 Direct3D 设备互操作: Direct3D 9Ex 设备必须使用设置为 D3DDEVTYPE_HAL 的 DeviceType 和使用 D3DCREATE_HARDWARE_VERTEXPROCESSING 标志的 BehaviorFlags 创建; Direct3D 10 和 Direct3D 11 设备必须在 DriverType 设置为 D3D_DRIVER_TYPE_HARDWARE 的情况下创建。
可以映射到 CUDA 地址空间的 Direct3D 资源是 Direct3D 缓冲区、纹理和表面。 这些资源使用 cudaGraphicsD3D9RegisterResource()、cudaGraphicsD3D10RegisterResource() 和 cudaGraphicsD3D11RegisterResource() 注册。
以下代码示例使用内核动态修改存储在顶点缓冲区对象中的 2D width x height网格。
Direct3D 9 Version:
IDirect3D9* D3D;
IDirect3DDevice9* device;
struct CUSTOMVERTEX {
FLOAT x, y, z;
DWORD color;
};
IDirect3DVertexBuffer9* positionsVB;
struct cudaGraphicsResource* positionsVB_CUDA;
int main()
{
int dev;
// Initialize Direct3D
D3D = Direct3DCreate9Ex(D3D_SDK_VERSION);
// Get a CUDA-enabled adapter
unsigned int adapter = 0;
for (; adapter < g_pD3D->GetAdapterCount(); adapter++) {
D3DADAPTER_IDENTIFIER9 adapterId;
g_pD3D->GetAdapterIdentifier(adapter, 0, &adapterId);
if (cudaD3D9GetDevice(&dev, adapterId.DeviceName)
== cudaSuccess)
break;
}
// Create device
...
D3D->CreateDeviceEx(adapter, D3DDEVTYPE_HAL, hWnd,
D3DCREATE_HARDWARE_VERTEXPROCESSING,
¶ms, NULL, &device);
// Use the same device
cudaSetDevice(dev);
// Create vertex buffer and register it with CUDA
unsigned int size = width * height * sizeof(CUSTOMVERTEX);
device->CreateVertexBuffer(size, 0, D3DFVF_CUSTOMVERTEX,
D3DPOOL_DEFAULT, &positionsVB, 0);
cudaGraphicsD3D9RegisterResource(&positionsVB_CUDA,
positionsVB,
cudaGraphicsRegisterFlagsNone);
cudaGraphicsResourceSetMapFlags(positionsVB_CUDA,
cudaGraphicsMapFlagsWriteDiscard);
// Launch rendering loop
while (...) {
...
Render();
...
}
...
}
void Render()
{
// Map vertex buffer for writing from CUDA
float4* positions;
cudaGraphicsMapResources(1, &positionsVB_CUDA, 0);
size_t num_bytes;
cudaGraphicsResourceGetMappedPointer((void**)&positions,
&num_bytes,
positionsVB_CUDA));
// Execute kernel
dim3 dimBlock(16, 16, 1);
dim3 dimGrid(width / dimBlock.x, height / dimBlock.y, 1);
createVertices<<<dimGrid, dimBlock>>>(positions, time,
width, height);
// Unmap vertex buffer
cudaGraphicsUnmapResources(1, &positionsVB_CUDA, 0);
// Draw and present
...
}
void releaseVB()
{
cudaGraphicsUnregisterResource(positionsVB_CUDA);
positionsVB->Release();
}
__global__ void createVertices(float4* positions, float time,
unsigned int width, unsigned int height)
{
unsigned int x = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y * blockDim.y + threadIdx.y;
// Calculate uv coordinates
float u = x / (float)width;
float v = y / (float)height;
u = u * 2.0f - 1.0f;
v = v * 2.0f - 1.0f;
// Calculate simple sine wave pattern
float freq = 4.0f;
float w = sinf(u * freq + time)
* cosf(v * freq + time) * 0.5f;
// Write positions
positions[y * width + x] =
make_float4(u, w, v, __int_as_float(0xff00ff00));
}
Direct3D 10 Version
ID3D10Device* device;
struct CUSTOMVERTEX {
FLOAT x, y, z;
DWORD color;
};
ID3D10Buffer* positionsVB;
struct cudaGraphicsResource* positionsVB_CUDA;
int main()
{
int dev;
// Get a CUDA-enabled adapter
IDXGIFactory* factory;
CreateDXGIFactory(__uuidof(IDXGIFactory), (void**)&factory);
IDXGIAdapter* adapter = 0;
for (unsigned int i = 0; !adapter; ++i) {
if (FAILED(factory->EnumAdapters(i, &adapter))
break;
if (cudaD3D10GetDevice(&dev, adapter) == cudaSuccess)
break;
adapter->Release();
}
factory->Release();
// Create swap chain and device
...
D3D10CreateDeviceAndSwapChain(adapter,
D3D10_DRIVER_TYPE_HARDWARE, 0,
D3D10_CREATE_DEVICE_DEBUG,
D3D10_SDK_VERSION,
&swapChainDesc, &swapChain,
&device);
adapter->Release();
// Use the same device
cudaSetDevice(dev);
// Create vertex buffer and register it with CUDA
unsigned int size = width * height * sizeof(CUSTOMVERTEX);
D3D10_BUFFER_DESC bufferDesc;
bufferDesc.Usage = D3D10_USAGE_DEFAULT;
bufferDesc.ByteWidth = size;
bufferDesc.BindFlags = D3D10_BIND_VERTEX_BUFFER;
bufferDesc.CPUAccessFlags = 0;
bufferDesc.MiscFlags = 0;
device->CreateBuffer(&bufferDesc, 0, &positionsVB);
cudaGraphicsD3D10RegisterResource(&positionsVB_CUDA,
positionsVB,
cudaGraphicsRegisterFlagsNone);
cudaGraphicsResourceSetMapFlags(positionsVB_CUDA,
cudaGraphicsMapFlagsWriteDiscard);
// Launch rendering loop
while (...) {
...
Render();
...
}
...
}
void Render()
{
// Map vertex buffer for writing from CUDA
float4* positions;
cudaGraphicsMapResources(1, &positionsVB_CUDA, 0);
size_t num_bytes;
cudaGraphicsResourceGetMappedPointer((void**)&positions,
&num_bytes,
positionsVB_CUDA));
// Execute kernel
dim3 dimBlock(16, 16, 1);
dim3 dimGrid(width / dimBlock.x, height / dimBlock.y, 1);
createVertices<<<dimGrid, dimBlock>>>(positions, time,
width, height);
// Unmap vertex buffer
cudaGraphicsUnmapResources(1, &positionsVB_CUDA, 0);
// Draw and present
...
}
void releaseVB()
{
cudaGraphicsUnregisterResource(positionsVB_CUDA);
positionsVB->Release();
}
__global__ void createVertices(float4* positions, float time,
unsigned int width, unsigned int height)
{
unsigned int x = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y * blockDim.y + threadIdx.y;
// Calculate uv coordinates
float u = x / (float)width;
float v = y / (float)height;
u = u * 2.0f - 1.0f;
v = v * 2.0f - 1.0f;
// Calculate simple sine wave pattern
float freq = 4.0f;
float w = sinf(u * freq + time)
* cosf(v * freq + time) * 0.5f;
// Write positions
positions[y * width + x] =
make_float4(u, w, v, __int_as_float(0xff00ff00));
}
Direct3D 11 Version
ID3D11Device* device;
struct CUSTOMVERTEX {
FLOAT x, y, z;
DWORD color;
};
ID3D11Buffer* positionsVB;
struct cudaGraphicsResource* positionsVB_CUDA;
int main()
{
int dev;
// Get a CUDA-enabled adapter
IDXGIFactory* factory;
CreateDXGIFactory(__uuidof(IDXGIFactory), (void**)&factory);
IDXGIAdapter* adapter = 0;
for (unsigned int i = 0; !adapter; ++i) {
if (FAILED(factory->EnumAdapters(i, &adapter))
break;
if (cudaD3D11GetDevice(&dev, adapter) == cudaSuccess)
break;
adapter->Release();
}
factory->Release();
// Create swap chain and device
...
sFnPtr_D3D11CreateDeviceAndSwapChain(adapter,
D3D11_DRIVER_TYPE_HARDWARE,
0,
D3D11_CREATE_DEVICE_DEBUG,
featureLevels, 3,
D3D11_SDK_VERSION,
&swapChainDesc, &swapChain,
&device,
&featureLevel,
&deviceContext);
adapter->Release();
// Use the same device
cudaSetDevice(dev);
// Create vertex buffer and register it with CUDA
unsigned int size = width * height * sizeof(CUSTOMVERTEX);
D3D11_BUFFER_DESC bufferDesc;
bufferDesc.Usage = D3D11_USAGE_DEFAULT;
bufferDesc.ByteWidth = size;
bufferDesc.BindFlags = D3D11_BIND_VERTEX_BUFFER;
bufferDesc.CPUAccessFlags = 0;
bufferDesc.MiscFlags = 0;
device->CreateBuffer(&bufferDesc, 0, &positionsVB);
cudaGraphicsD3D11RegisterResource(&positionsVB_CUDA,
positionsVB,
cudaGraphicsRegisterFlagsNone);
cudaGraphicsResourceSetMapFlags(positionsVB_CUDA,
cudaGraphicsMapFlagsWriteDiscard);
// Launch rendering loop
while (...) {
...
Render();
...
}
...
}
void Render()
{
// Map vertex buffer for writing from CUDA
float4* positions;
cudaGraphicsMapResources(1, &positionsVB_CUDA, 0);
size_t num_bytes;
cudaGraphicsResourceGetMappedPointer((void**)&positions,
&num_bytes,
positionsVB_CUDA));
// Execute kernel
dim3 dimBlock(16, 16, 1);
dim3 dimGrid(width / dimBlock.x, height / dimBlock.y, 1);
createVertices<<<dimGrid, dimBlock>>>(positions, time,
width, height);
// Unmap vertex buffer
cudaGraphicsUnmapResources(1, &positionsVB_CUDA, 0);
// Draw and present
...
}
void releaseVB()
{
cudaGraphicsUnregisterResource(positionsVB_CUDA);
positionsVB->Release();
}
__global__ void createVertices(float4* positions, float time,
unsigned int width, unsigned int height)
{
unsigned int x = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y * blockDim.y + threadIdx.y;
// Calculate uv coordinates
float u = x / (float)width;
float v = y / (float)height;
u = u * 2.0f - 1.0f;
v = v * 2.0f - 1.0f;
// Calculate simple sine wave pattern
float freq = 4.0f;
float w = sinf(u * freq + time)
* cosf(v * freq + time) * 0.5f;
// Write positions
positions[y * width + x] =
make_float4(u, w, v, __int_as_float(0xff00ff00));
}
3.2.13.3 SLI一致性
在具有多个 GPU 的系统中,所有支持 CUDA 的 GPU 都可以通过 CUDA 驱动程序和运行时作为单独的设备进行访问。然而,当系统处于 SLI 模式时,有如下所述的特殊注意事项。
首先,在一个 GPU 上的一个 CUDA 设备中的分配将消耗其他 GPU 上的内存,这些 GPU 是 Direct3D 或 OpenGL 设备的 SLI 配置的一部分。因此,分配可能会比预期的更早失败。
其次,应用程序应该创建多个 CUDA 上下文,一个用于 SLI 配置中的每个 GPU。虽然这不是严格要求,但它避免了设备之间不必要的数据传输。应用程序可以将 cudaD3D[9|10|11]GetDevices() 用于 Direct3D 和 cudaGLGetDevices() 用于 OpenGL 调用,以识别当前执行渲染的设备的 CUDA 设备句柄和下一帧。鉴于此信息,应用程序通常会选择适当的设备并将 Direct3D 或 OpenGL 资源映射到由 cudaD3D[9|10|11]GetDevices() 或当 deviceList 参数设置为 cudaD3D[9|10 |11]DeviceListCurrentFrame 或 cudaGLDeviceListCurrentFrame。
请注意,从 cudaGraphicsD9D[9|10|11]RegisterResource 和 cudaGraphicsGLRegister[Buffer|Image] 返回的资源只能在发生注册的设备上使用。因此,在 SLI 配置中,当在不同的 CUDA 设备上计算不同帧的数据时,有必要分别为每个设备注册资源。
有关 CUDA 运行时如何分别与 Direct3D 和 OpenGL 互操作的详细信息,请参阅 Direct3D 互操作性和 OpenGL 互操作性。
3.2.14 扩展资源一致性
这里待定(实际上是作者不熟悉)
3.2.15 CUDA用户对象
CUDA 用户对象可用于帮助管理 CUDA 中异步工作所使用的资源的生命周期。 特别是,此功能对于 CUDA 图和流捕获非常有用。
各种资源管理方案与 CUDA 图不兼容。 例如,考虑基于事件的池或同步创建、异步销毁方案。
// Library API with pool allocation
void libraryWork(cudaStream_t stream) {
auto &resource = pool.claimTemporaryResource();
resource.waitOnReadyEventInStream(stream);
launchWork(stream, resource);
resource.recordReadyEvent(stream);
}
// Library API with asynchronous resource deletion
void libraryWork(cudaStream_t stream) {
Resource *resource = new Resource(...);
launchWork(stream, resource);
cudaStreamAddCallback(
stream,
[](cudaStream_t, cudaError_t, void *resource) {
delete static_cast<Resource *>(resource);
},
resource,
0);
// Error handling considerations not shown
}
由于需要间接或图更新的资源的非固定指针或句柄,以及每次提交工作时需要同步 CPU 代码,这些方案对于 CUDA 图来说是困难的。如果这些注意事项对库的调用者隐藏,并且由于在捕获期间使用了不允许的 API,它们也不适用于流捕获。存在各种解决方案,例如将资源暴露给调用者。 CUDA 用户对象提供了另一种方法。
CUDA 用户对象将用户指定的析构函数回调与内部引用计数相关联,类似于 C++ shared_ptr。引用可能归 CPU 上的用户代码和 CUDA 图所有。请注意,对于用户拥有的引用,与 C++ 智能指针不同,没有代表引用的对象;用户必须手动跟踪用户拥有的引用。一个典型的用例是在创建用户对象后立即将唯一的用户拥有的引用移动到 CUDA 图。
当引用关联到 CUDA 图时,CUDA 将自动管理图操作。克隆的 cudaGraph_t 保留源 cudaGraph_t 拥有的每个引用的副本,具有相同的多重性。实例化的 cudaGraphExec_t 保留源 cudaGraph_t 中每个引用的副本。当 cudaGraphExec_t 在未同步的情况下被销毁时,引用将保留到执行完成。
这是一个示例用法。
cudaGraph_t graph; // Preexisting graph
Object *object = new Object; // C++ object with possibly nontrivial destructor
cudaUserObject_t cuObject;
cudaUserObjectCreate(
&cuObject,
object, // Here we use a CUDA-provided template wrapper for this API,
// which supplies a callback to delete the C++ object pointer
1, // Initial refcount
cudaUserObjectNoDestructorSync // Acknowledge that the callback cannot be
// waited on via CUDA
);
cudaGraphRetainUserObject(
graph,
cuObject,
1, // Number of references
cudaGraphUserObjectMove // Transfer a reference owned by the caller (do
// not modify the total reference count)
);
// No more references owned by this thread; no need to call release API
cudaGraphExec_t graphExec;
cudaGraphInstantiate(&graphExec, graph, nullptr, nullptr, 0); // Will retain a
// new reference
cudaGraphDestroy(graph); // graphExec still owns a reference
cudaGraphLaunch(graphExec, 0); // Async launch has access to the user objects
cudaGraphExecDestroy(graphExec); // Launch is not synchronized; the release
// will be deferred if needed
cudaStreamSynchronize(0); // After the launch is synchronized, the remaining
// reference is released and the destructor will
// execute. Note this happens asynchronously.
// If the destructor callback had signaled a synchronization object, it would
// be safe to wait on it at this point.
子图节点中的图所拥有的引用与子图相关联,而不是与父图相关联。如果更新或删除子图,则引用会相应更改。如果使用 cudaGraphExecUpdate 或 cudaGraphExecChildGraphNodeSetParams 更新可执行图或子图,则会克隆新源图中的引用并替换目标图中的引用。在任何一种情况下,如果先前的启动不同步,则将保留任何将被释放的引用,直到启动完成执行。
目前没有通过 CUDA API 等待用户对象析构函数的机制。用户可以从析构代码中手动发出同步对象的信号。另外,从析构函数调用 CUDA API 是不合法的,类似于对 cudaLaunchHostFunc 的限制。这是为了避免阻塞 CUDA 内部共享线程并阻止前进。如果依赖是一种方式并且执行调用的线程不能阻止 CUDA 工作的前进进度,则向另一个线程发出执行 API 调用的信号是合法的。
用户对象是使用 cudaUserObjectCreate 创建的,这是浏览相关 API 的一个很好的起点。
3.3 版本和兼容性
开发人员在开发 CUDA 应用程序时应该关注两个版本号:描述计算设备的一般规范和特性的计算能力(请参阅计算能力)和描述受支持的特性的 CUDA 驱动程序 API 的版本。驱动程序 API 和运行时。
驱动程序 API 的版本在驱动程序头文件中定义为 CUDA_VERSION。它允许开发人员检查他们的应用程序是否需要比当前安装的设备驱动程序更新的设备驱动程序。这很重要,因为驱动 API 是向后兼容的,这意味着针对特定版本的驱动 API 编译的应用程序、插件和库(包括 CUDA 运行时)将继续在后续的设备驱动版本上工作,如下图所示. 驱动 API 不向前兼容,这意味着针对特定版本的驱动 API 编译的应用程序、插件和库(包括 CUDA 运行时)将不适用于以前版本的设备驱动。
需要注意的是,支持的版本的混合和匹配存在限制:
- 由于系统上一次只能安装一个版本的 CUDA 驱动程序,因此安装的驱动程序必须与必须在已建成的系统其上运行的任何应用程序、插件或库所依据的最大驱动程序 API 版本相同或更高版本 。
- 应用程序使用的所有插件和库必须使用相同版本的 CUDA 运行时,除非它们静态链接到运行时,在这种情况下,运行时的多个版本可以共存于同一进程空间中。 请注意,如果使用 nvcc 链接应用程序,则默认使用静态版本的 CUDA Runtime 库,并且所有 CUDA Toolkit 库都针对 CUDA Runtime 静态链接。
- 应用程序使用的所有插件和库必须使用与使用运行时的任何库(例如 cuFFT、cuBLAS…)相同的版本,除非静态链接到这些库。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DqGP4Rts-1676718503926)(compatibility-of-cuda-versions.png)]
对于 Tesla GPU 产品,CUDA 10 为 CUDA 驱动程序的用户模式组件引入了新的向前兼容升级路径。 此功能在 CUDA 兼容性中进行了描述。 此处描述的对 CUDA 驱动程序版本的要求适用于用户模式组件的版本。
3.4 Compute Modes
在运行 Windows Server 2008 及更高版本或 Linux 的 Tesla 解决方案上,可以使用 NVIDIA 的系统管理接口 (nvidia-smi) 将系统中的任何设备设置为以下三种模式之一,这是作为驱动程序一部分分发的工具:
- 默认计算模式:多个主机线程可以同时使用该设备(通过在此设备上调用
cudaSetDevice(),当使用运行时 API 时,或通过使 current 成为与设备关联的上下文,当使用驱动程序 API 时)。 - 独占进程计算模式:在设备上只能在系统中的所有进程中创建一个 CUDA 上下文。 在创建该上下文的进程中,该上下文可以是当前任意数量的线程。
- 禁止的计算模式:不能在设备上创建 CUDA 上下文。
这尤其意味着,如果设备 0 处于禁止模式或独占进程模式并被另一个设备使用,则使用运行时 API 而不显式调用 cudaSetDevice() 的主机线程可能与设备 0 以外的设备相关联过程。 cudaSetValidDevices() 可用于从设备的优先级列表中设置设备。
另请注意,对于采用 Pascal 架构(具有主要修订号 6 及更高版本的计算能力)的设备,存在对计算抢占的支持。这允许计算任务在指令级粒度上被抢占,而不是像以前的 Maxwell 和 Kepler GPU 架构中那样以线程块粒度进行抢占,其好处是可以防止具有长时间运行内核的应用程序垄断系统或超时。但是,将存在与计算抢占相关的上下文切换开销,它会在支持的设备上自动启用。具有属性 cudaDevAttrComputePreemptionSupported 的单个属性查询函数 cudaDeviceGetAttribute() 可用于确定正在使用的设备是否支持计算抢占。希望避免与不同进程相关的上下文切换开销的用户可以通过选择独占进程模式来确保在 GPU 上只有一个进程处于活动状态。
应用程序可以通过检查 computeMode 设备属性来查询设备的计算模式(请参阅设备枚举)。
3.5 模式切换
具有显示输出的 GPU 将一些 DRAM 内存专用于所谓的主画面,用于刷新用户查看其输出的显示设备。当用户通过更改显示器的分辨率或位深度(使用 NVIDIA 控制面板或 Windows 上的显示控制面板)来启动显示器的模式切换时,主表面所需的内存量会发生变化。例如,如果用户将显示分辨率从 1280x1024x32 位更改为 1600x1200x32 位,则系统必须将 7.68 MB 专用于主画面,而不是 5.24 MB。 (在启用抗锯齿的情况下运行的全屏图形应用程序可能需要更多的主画面显示内存。)在 Windows 上,可能会启动显示模式切换的其他事件包括启动全屏 DirectX 应用程序,按 Alt+Tab 来完成任务从全屏 DirectX 应用程序切换,或按 Ctrl+Alt+Del 锁定计算机。
如果模式切换增加了主画面所需的内存量,系统可能不得不蚕食专用于 CUDA 应用程序的内存分配。因此,模式切换会导致对 CUDA 运行时的任何调用失败并返回无效的上下文错误。
3.6 在Windows上的Tesla计算集群
使用 NVIDIA 的系统管理界面 (nvidia-smi),可以将 Windows 设备驱动程序置于 Tesla 和 Quadro 系列设备的 TCC(Tesla Compute Cluster)模式。
TCC 模式不支持任何图形功能。
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561
![【QA】[Vue/复选框全选] v-model绑定每一项的赋初值问题](https://img-blog.csdnimg.cn/10086f660a0846f5996d1e7923705b0e.png)




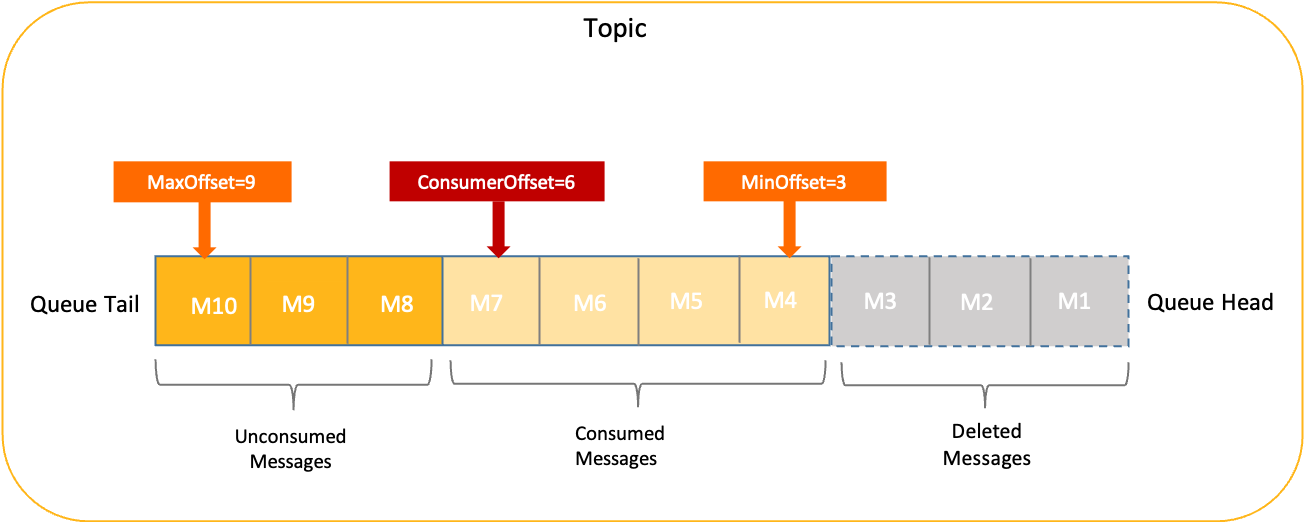
![[AI生成图片] 效果最好的Midjourney 的介绍和使用](https://img-blog.csdnimg.cn/2b15ac6ad13043f2a0671a7630de957c.png)