R
O
S
1
{\rm ROS1}
ROS1的基础及应用,基于古月的课,各位可以去看,基于
h
a
w
k
b
o
t
{\rm hawkbot}
hawkbot机器人进行实际操作。
R
O
S
{\rm ROS}
ROS版本:
R
O
S
1
{\rm ROS1}
ROS1的
M
e
l
o
d
i
c
{\rm Melodic}
Melodic;实际机器人:
H
a
w
k
b
o
t
{\rm Hawkbot}
Hawkbot;
1.机器人必备条件
-
硬件要求
- 差分轮式机器人,使用
T
w
i
s
t
{\rm Twist}
Twist速度指令控制
- l i n e a r {\rm linear} linear: X Y Z {\rm XYZ} XYZ方向上的线速度,单位: m / s {\rm m/s} m/s;
- a n g u l a r {\rm angular} angular: X Y Z {\rm XYZ} XYZ方向上的角速度,单位: r a d / s {\rm rad/s} rad/s;
- 机器人必须安装激光雷达等测距设备,可以获取环境深度信息;
- 最好使用正方形和圆形的机器人,其他外形的机器人效果可能不佳;
- 差分轮式机器人,使用
T
w
i
s
t
{\rm Twist}
Twist速度指令控制
-
深度信息
rosmsg show sensor_msgs/LaserScan =========================================================================== angle_min:可检测范围的起始角度; angle_max:可检测范围的终止角度,与angle_min组成激光雷达可检测范围; angle_increment:相邻数据帧之间的角度步长; time_increment:采集到相邻数据帧之间的时间步长,当传感器处于相对运动状态时进行补偿使用; scan_time:采集一帧数据所需要的时间; range_min:最近可检测深度的阈值; range_max:最远可检测深度的阈值; ranges:一帧深度数据的存储数组; =========================================================================== -
里程计信息
- p o s e {\rm pose} pose:机器人当前位置坐标,包括机器人的 X Y Z {\rm XYZ} XYZ三轴位置与方向参数,及用于校正误差的协方差矩阵;
- t w i s t {\rm twist} twist:机器人当前的运动状态,包括 X Y Z {\rm XYZ} XYZ三轴的线速度与角速度,及用于校正误差的协方差矩阵;
-
仿真环境
# 创建仿真环境 roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
2.ROS SLAM功能包应用方法
-
g m a p p i n g {\rm gmapping} gmapping功能包概述
- 基于激光雷达;
- R a o − B l a c k w e l l i z e d {\rm Rao-Blackwellized} Rao−Blackwellized粒子滤波算法;
- 二维栅格地图;
- 需要机器人提供里程计信息;
- O p e n S l a m {\rm OpenSlam} OpenSlam开源算法;
- 输出地图话题: n a v _ m s g s / O c c u p a n c y G r i d {\rm nav\_msgs/OccupancyGrid} nav_msgs/OccupancyGrid;
-
g m a p p i n g {\rm gmapping} gmapping功能包总体框架

-
安装 g m a p p i n g {\rm gmapping} gmapping功能包
# 安装gmapping sudo apt-get install ros-melodic-gmapping
-
栅格地图取值原理

- 致命障碍:栅格值为 254 254 254,障碍物与机器人中心重合,此时机器人必然与障碍物发生碰撞;
- 内切障碍:栅格值为 253 253 253,障碍物处于机器人轮廓的内切圆内,此时机器人也必然与障碍物发生碰撞;
- 外切障碍:栅格值为 252 ~ 128 252~128 252~128,障碍物处于机器人轮廓的外切圆内,此时机器人与障碍物临界接触,不一定发生碰撞;
- 非自由空间:栅格值为 128 ~ 0 128~0 128~0,障碍物附近区域,一旦机器人进入该区域,将有较大概率发生碰撞,属于危险警戒区,机器人应该尽量避免进入;
- 自由区域:栅格值为 0 0 0,此处没有障碍物,机器人可以自由通过;
- 未知区域:栅格值为 255 255 255,此处还没有探知是否有障碍物,机器人可以前往继续建图;
-
配置 g m a p p i n g {\rm gmapping} gmapping功能包
# gmapping.launch文件内容 <launch> <arg name="scan_topic" default="scan" /> <node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" clear_params="true"> <param name="odom_frame" value="odom"/> <param name="map_update_interval" value="5.0"/> <!-- Set maxUrange < actual maximum range of the Laser --> <param name="maxRange" value="5.0"/> <param name="maxUrange" value="4.5"/> <param name="sigma" value="0.05"/> <param name="kernelSize" value="1"/> <param name="lstep" value="0.05"/> <param name="astep" value="0.05"/> <param name="iterations" value="5"/> <param name="lsigma" value="0.075"/> <param name="ogain" value="3.0"/> <param name="lskip" value="0"/> <param name="srr" value="0.01"/> <param name="srt" value="0.02"/> <param name="str" value="0.01"/> <param name="stt" value="0.02"/> <param name="linearUpdate" value="0.5"/> <param name="angularUpdate" value="0.436"/> <param name="temporalUpdate" value="-1.0"/> <param name="resampleThreshold" value="0.5"/> <param name="particles" value="80"/> <param name="xmin" value="-1.0"/> <param name="ymin" value="-1.0"/> <param name="xmax" value="1.0"/> <param name="ymax" value="1.0"/> <param name="delta" value="0.05"/> <param name="llsamplerange" value="0.01"/> <param name="llsamplestep" value="0.01"/> <param name="lasamplerange" value="0.005"/> <param name="lasamplestep" value="0.005"/> <remap from="scan" to="$(arg scan_topic)"/> </node> </launch> -
运行激光雷达建图例程
# 1.启动gmapping演示 roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch roslaunch mbot_navigaztion gmapping_demo.launch roslaunch mbot_teleop mbot_teleop.launch # 2.切换到地图保存目录,保存地图 roscd mbot_navigation/maps/ # rosrun map_server map_saver -f 地图名 rosrun map_server map_saver -f simulink_maps # 注: # 建图效果好坏和很多因素有关,如硬件、算法本身、可调参数等; # 硬件条件不好,建图过程中可能发生移位,导致建图失败;建图效果:

地图的 . p g m {\rm .pgm} .pgm文和 . y a m l {\rm .yaml} .yaml信息:

-
运行 k i n e c t {\rm kinect} kinect建图例程
# 1.启动建图演示 roslaunch mbot_gazebo mbot_kinect_nav_gazebo.launch roslaunch mbot_navigation gmapping_demo.launch roslaunch mbot_teleop mbot_teleop.launch # 2.若运行kinect抛出如下错误 cannot launch node of type [depthimage_to_laserscan/depthimage_to_laserscan]:depthimage_to_laserscan # 解决方案 sudo apt-get install ros-melodic-depthimage-to-laserscan # 注: # 使用摄像头建模,效果好坏和硬件配置很大关系; # 如下图所示,使用虚拟机建图十分卡顿,很容易发生移位; # 如果笔记本的配置不是很好,建议了解建图过程即可; # 如果笔记本配置不是很好,建图过程会直接卡死,想退出也难;没有完全建好的图效果(发生了移位):

-
实际机器人建图实例
# Hawkbot机器人的实际建图过程 # 1.时间同步 # 远程登录移动机器人端,并进行时间同步 ssh ... sudo ntpdate 虚拟机IP # 2.启动建图节点 roslaunch hawbot bringup.launch(机器人端) roslaunch hawkbot teleop_key.launch(机器人或虚拟机端) roslaunch hawkbot gmapping_slam.launch(虚拟机端) # 3.保存地图 roscd hawkbot/maps/ rosrun map_server map_saver -f 地图名称
3.ROS中的导航框架
-
R O S {\rm ROS} ROS的导航框架

-
m o v e _ b a s e {\rm move\_base} move_base

- 全局路径规划
(
g
l
o
b
a
l
p
l
a
n
n
e
r
)
({\rm global\ planner})
(global planner):
- 全局最优路径规划;
- D i j k s t r a {\rm Dijkstra} Dijkstra或 A ∗ A^* A∗算法;
- 本地实时规划
(
l
o
c
a
l
p
l
a
n
n
e
r
)
({\rm local\ planner})
(local planner):
- 规划机器人每个周期内的线速度、角速度,使之尽量符合全局最优路径;
- 实时避障;
- T r a j e c t o r y R o l l o u t {\rm Trajectory\ Rollout} Trajectory Rollout和 D y n a m i c W i n d o w A p p r o a c h e s {\rm Dynamic\ Window\ Approaches} Dynamic Window Approaches算法;
- 搜索躲避和行进的多条路径,综合各评价标准选取最优路径;
- 全局路径规划
(
g
l
o
b
a
l
p
l
a
n
n
e
r
)
({\rm global\ planner})
(global planner):
-
m o v e _ b a s e {\rm move\_base} move_base功能包的话题和服务

-
配置 m o v e _ b a s e {\rm move\_base} move_base节点
# move_base.launch文件内容 <launch> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true"> <rosparam file="$(find mbot_navigation)/config/mbot/costmap_common_params.yaml" command="load" ns="global_costmap" /> <rosparam file="$(find mbot_navigation)/config/mbot/costmap_common_params.yaml" command="load" ns="local_costmap" /> <rosparam file="$(find mbot_navigation)/config/mbot/local_costmap_params.yaml" command="load" /> <rosparam file="$(find mbot_navigation)/config/mbot/global_costmap_params.yaml" command="load" /> <rosparam file="$(find mbot_navigation)/config/mbot/base_local_planner_params.yaml" command="load" /> </node> </launch> -
a m c l {\rm amcl} amcl
- 蒙特卡罗定位方法;
- 二维环境定位;
- 针对已有地图使用粒子滤波器跟踪一个机器人的姿态;
-
a m c l {\rm amcl} amcl功能包的话题和服务

-
a m c l {\rm amcl} amcl定位

- 里程计定位:只通过里程计的数据来处理 / b a s e {\rm /base} /base和 / o d o m {\rm /odom} /odom间的 T F {\rm TF} TF变换;
- a m c l {\rm amcl} amcl定位:估算机器人在地图坐标系 / m a p {\rm /map} /map下的位姿信息,提供 / b a s e 、 / o d o m 、 / m a p {\rm /base、/odom、/map} /base、/odom、/map间的 T F {\rm TF} TF变换;
-
配置 a m c l {\rm amcl} amcl节点
# amcl.launch文件内容 <launch> <arg name="use_map_topic" default="false"/> <arg name="scan_topic" default="scan"/> <node pkg="amcl" type="amcl" name="amcl" clear_params="true"> <param name="use_map_topic" value="$(arg use_map_topic)"/> <!-- Publish scans from best pose at a max of 10 Hz --> <param name="odom_model_type" value="diff"/> <param name="odom_alpha5" value="0.1"/> <param name="gui_publish_rate" value="10.0"/> <param name="laser_max_beams" value="60"/> <param name="laser_max_range" value="12.0"/> <param name="min_particles" value="500"/> <param name="max_particles" value="2000"/> <param name="kld_err" value="0.05"/> <param name="kld_z" value="0.99"/> <param name="odom_alpha1" value="0.2"/> <param name="odom_alpha2" value="0.2"/> <!-- translation std dev, m --> <param name="odom_alpha3" value="0.2"/> <param name="odom_alpha4" value="0.2"/> <param name="laser_z_hit" value="0.5"/> <param name="laser_z_short" value="0.05"/> <param name="laser_z_max" value="0.05"/> <param name="laser_z_rand" value="0.5"/> <param name="laser_sigma_hit" value="0.2"/> <param name="laser_lambda_short" value="0.1"/> <param name="laser_model_type" value="likelihood_field"/> <!-- <param name="laser_model_type" value="beam"/> --> <param name="laser_likelihood_max_dist" value="2.0"/> <param name="update_min_d" value="0.25"/> <param name="update_min_a" value="0.2"/> <param name="odom_frame_id" value="odom"/> <param name="resample_interval" value="1"/> <!-- Increase tolerance because the computer can get quite busy --> <param name="transform_tolerance" value="1.0"/> <param name="recovery_alpha_slow" value="0.0"/> <param name="recovery_alpha_fast" value="0.0"/> <remap from="scan" to="$(arg scan_topic)"/> </node> </launch>
4.ROS机器人自主导航
-
导航仿真
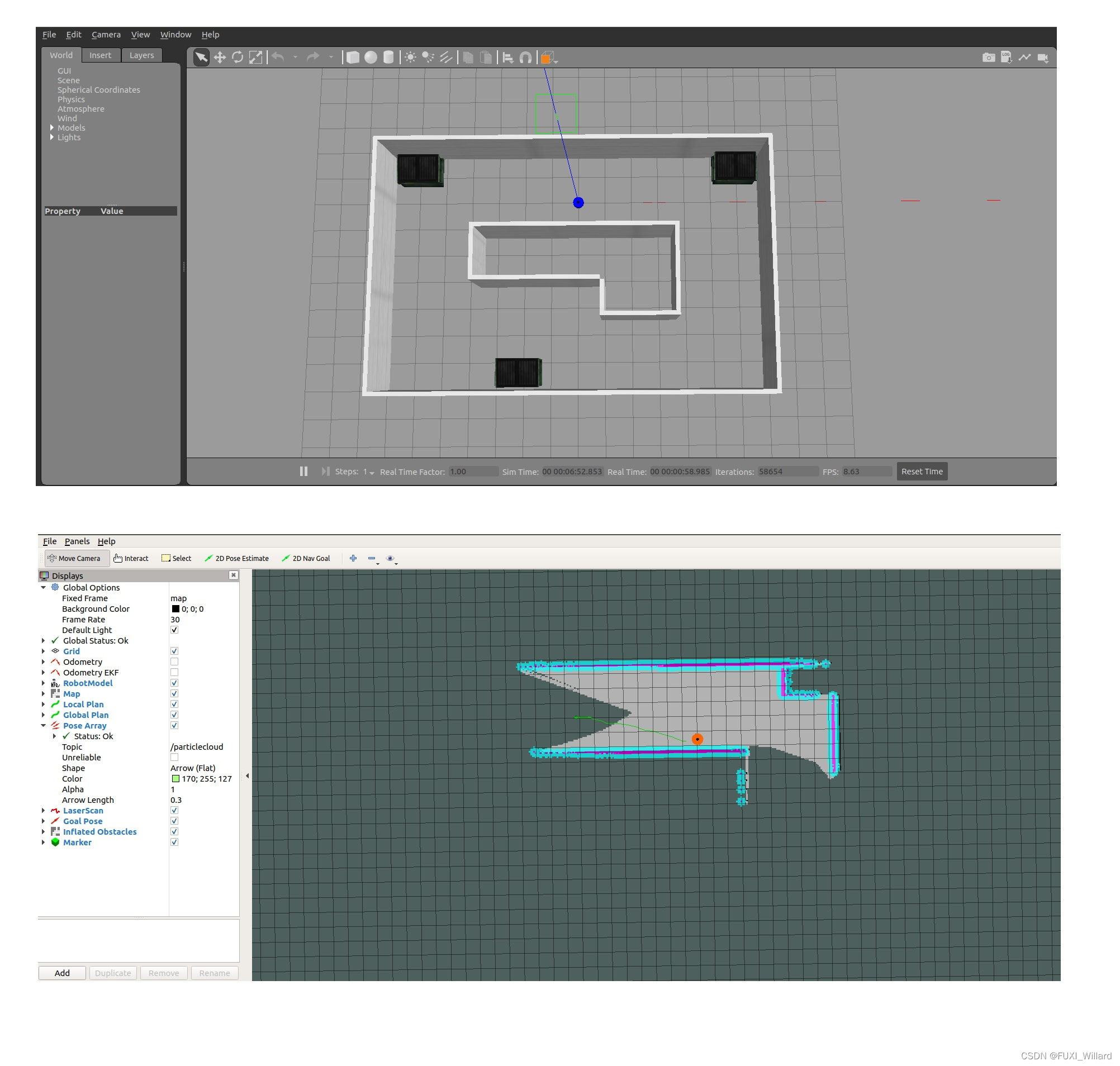
# 1.启动导航仿真包 roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch roslaunch mbot_navigation nav_cloister_demo.launch # 2.导航步骤 # 2.1 若机器人不在建图坐标系原点,先点击"2D Pose Estimate",将地图和雷达数据对上; # 2.2 匹配好机器人初始位置后,点击"2D Nav Goal"发布机器人目标点;
-
导航 S L A M {\rm SLAM} SLAM仿真
# 1.启动相应.launch文件 roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch roslaunch mbot_navigation exploring_slam_demo.launch # 2.通过点击"2D Nav Goal"发布机器人目标点进行建图; # 自主探索SLAM仿真 # 启动相应的.launch文件 roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch roslaunch mbot_navigation exploring_slam_demo.launch rosrun mbot_navigation exploring_slam.py