概述
- 首先导入必要的库文件,包括I2C驱动和OLED驱动。
- 在代码中配置I2C接口,并初始化I2C驱动。
- 配置ISL29035传感器,包括配置传感器的工作模式和量程。
- 使用I2C读取ISL29035传感器的数据,并将其存储在变量中。
- 初始化OLED驱动,并在OLED屏幕上显示读取的数据。
请注意,这仅是一个大致的步骤,具体实现可能因硬件和软件环境而异。
对于OLED的配置,可以查看往期的博客。
最近在弄ST和瑞萨的课程,需要样片的可以加群申请:6_15061293 。
硬件准备
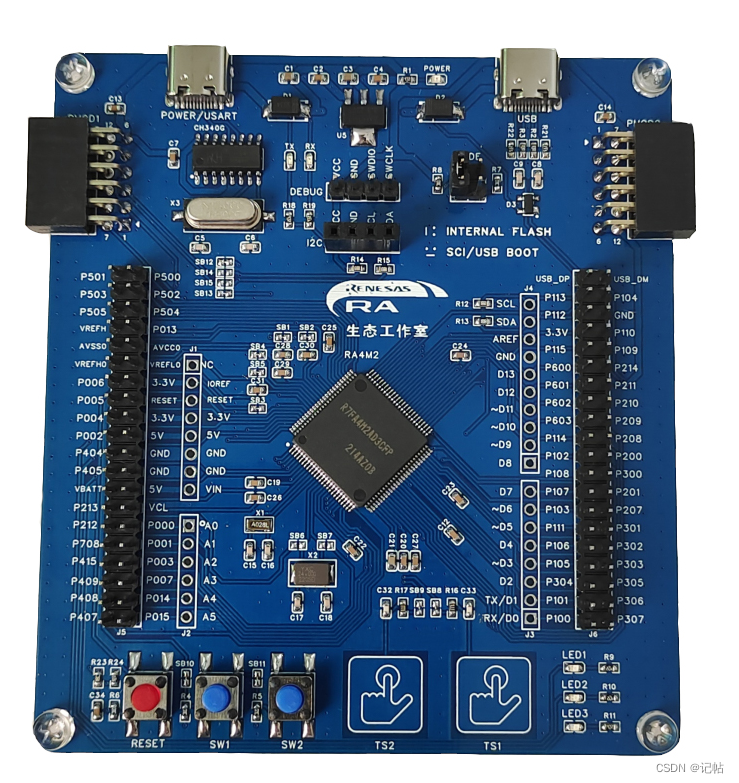
首先需要准备一个开发板,这里我准备的是芯片型号R7FAM2AD3CFP的开发板:
样品申请
https://www.wjx.top/vm/wBbmSFp.aspx#
IIC配置
配置RA4M2的I2C接口,使其作为I2C master进行通信。
对于OLED的IIC配置,可以查看往期的博客。
查看ISL29035说明书,最小电路图如下所示。
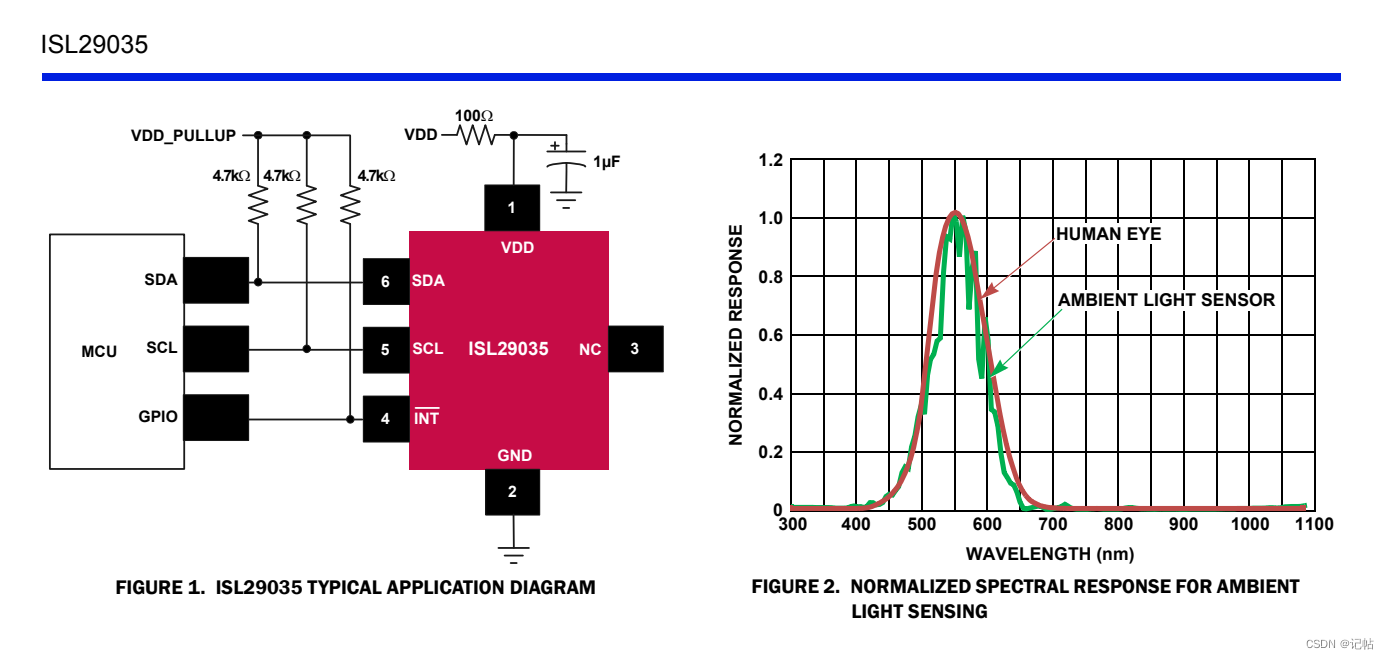
由于需要读取ISL29035数据,需要使用IIC接口,这里使用PMOD2上的接口(P410和P411)。

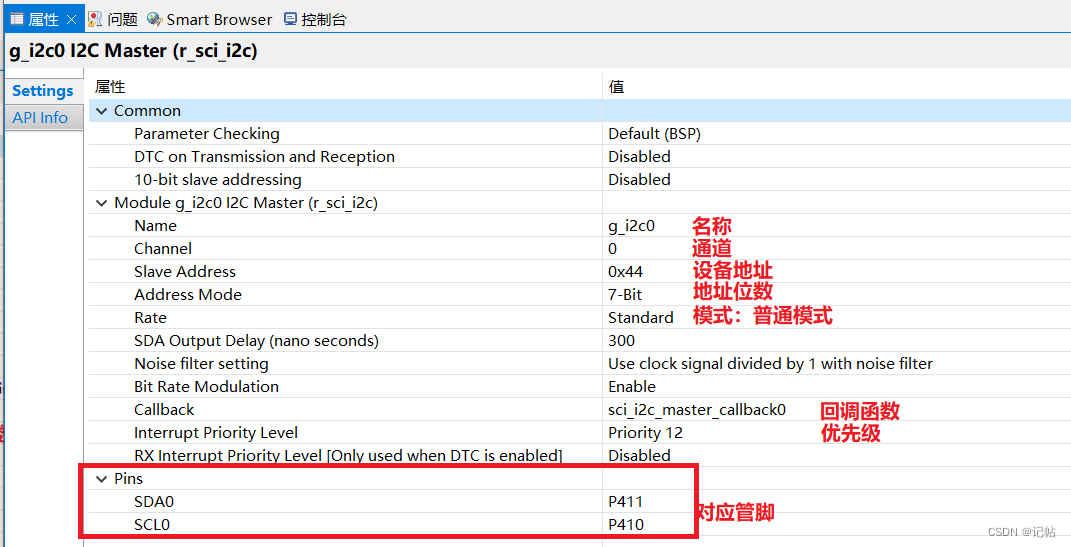
点击Stacks->New Stack->Connectivity -> I2C Master(r_sci_i2c)。

查看说明书可以得知,ISL29035的地址为0x44(1000100)。

设置IIC的配置。
R_SCI_I2C_Open()函数原型

R_SCI_I2C_Open()函数为执行IIC初始化,开启配置如下所示。
/* Initialize the I2C module */
err = R_SCI_I2C_Open(&g_i2c0_ctrl, &g_i2c0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
R_SCI_I2C_Write()函数原型

R_SCI_I2C_Write()函数是向IIC设备中写入数据,写入格式如下所示。
err = R_SCI_I2C_Write(&g_i2c0_ctrl, &g_i2c_tx_buffer[0], I2C_BUFFER_SIZE_BYTES, false);
assert(FSP_SUCCESS == err);
R_SCI_I2C_Read()函数原型
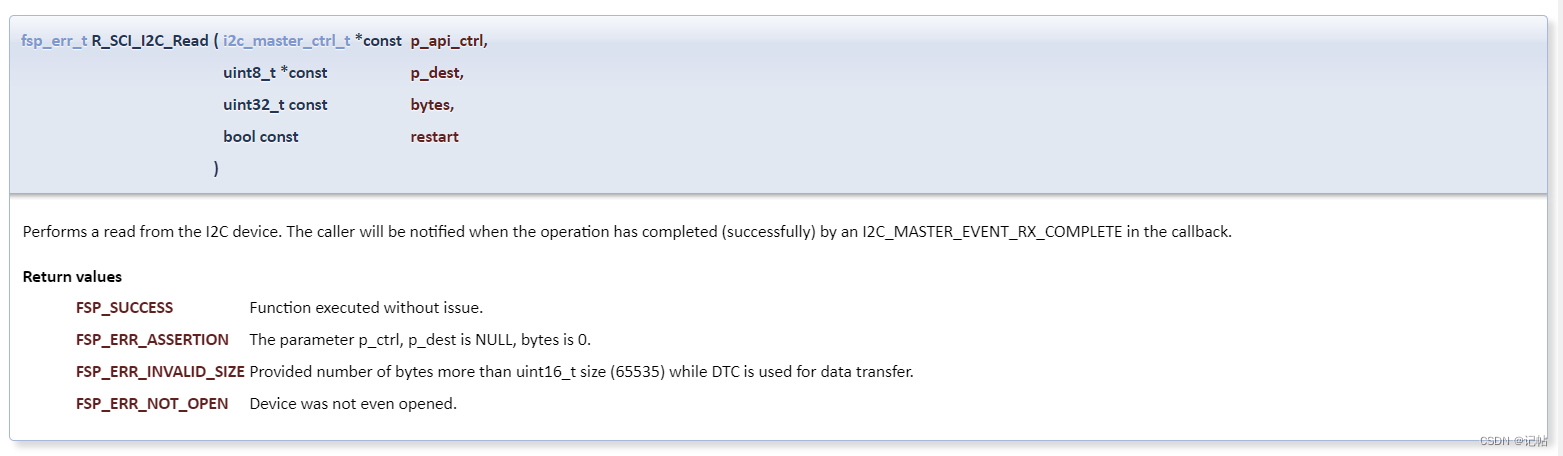
R_SCI_I2C_Read()函数是向IIC设备中读取数据,读取格式如下所示。
err = R_SCI_I2C_Write(&g_i2c0_ctrl, &g_i2c_tx_buffer[0], I2C_BUFFER_SIZE_BYTES, false);
assert(FSP_SUCCESS == err);
sci_i2c_master_callback()回调函数
对于数据是否发送完毕,可以查看是否获取到I2C_MASTER_EVENT_TX_COMPLETE字段。

/* Callback function */
i2c_master_event_t i2c_event1 = I2C_MASTER_EVENT_ABORTED;
void sci_i2c_master_callback0(i2c_master_callback_args_t *p_args)
{
/* TODO: add your own code here */
i2c_event1 = I2C_MASTER_EVENT_ABORTED;
if (NULL != p_args)
{
/* capture callback event for validating the i2c transfer event*/
i2c_event1 = p_args->event;
}
}
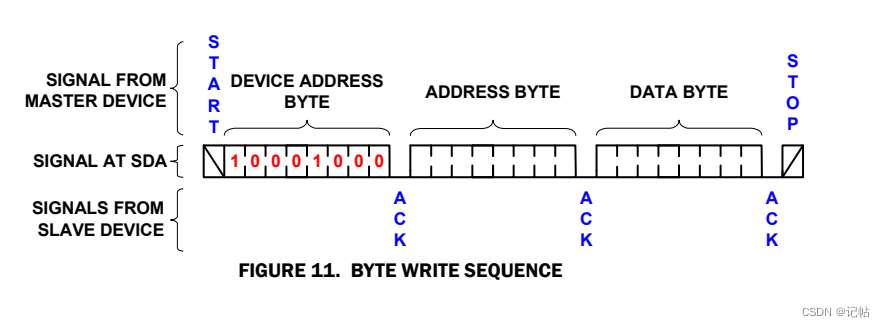
ISL29035写数据
对于ISL29035写数据,手册上的操作方式如下所示。
设备地址+操作地址+数据
初始化程序如下所示。
void DigitalLightISL29035_writeRegister( int reg_address, uint8_t val) {
uint8_t ii[2]={0x00,0x00};
ii[0] = reg_address;
ii[1] = val;
err = R_SCI_I2C_Write(&g_i2c0_ctrl, ii, 0x02, false);
assert(FSP_SUCCESS == err);
/* Since there is nothing else to do, block until Callback triggers*/
//while ((I2C_MASTER_EVENT_TX_COMPLETE != i2c_event) && timeout_ms)
while ((I2C_MASTER_EVENT_TX_COMPLETE != i2c_event1) && timeout_ms1>0)
{
R_BSP_SoftwareDelay(1U, BSP_DELAY_UNITS_MICROSECONDS);
timeout_ms1--;
}
if (I2C_MASTER_EVENT_ABORTED == i2c_event1)
{
__BKPT(0);
}
/* Read data back from the I2C slave */
i2c_event1 = I2C_MASTER_EVENT_ABORTED;
timeout_ms1 = 100000;
}
ISL29035读数据
对于ISL29035读数据,手册上的操作方式如下所示。
设备地址+操作地址+设备地址+数据读取
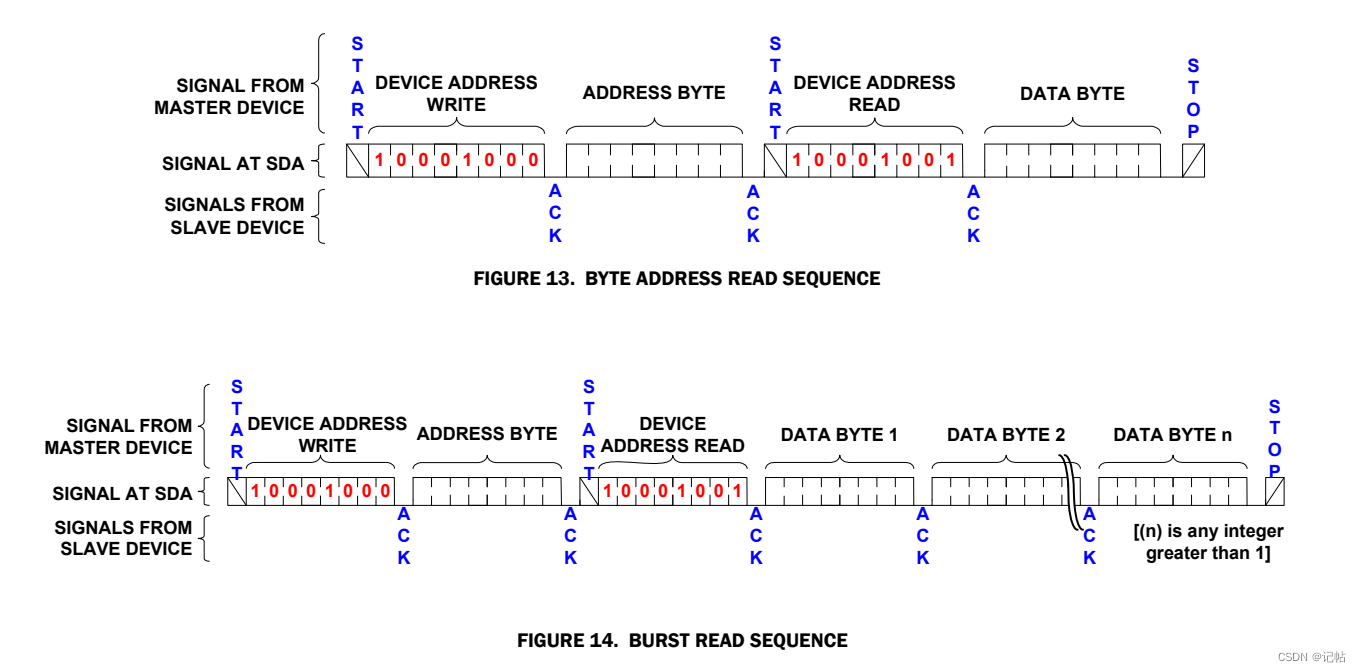
读取操作函数如下所示,先发送操作地址,在进行读取。
uint8_t DigitalLightISL29035_readRegister(uint8_t reg_address) {
uint8_t value;
err = R_SCI_I2C_Write(&g_i2c0_ctrl, ®_address, 0x01, false);
assert(FSP_SUCCESS == err);
/* Since there is nothing else to do, block until Callback triggers*/
while ((I2C_MASTER_EVENT_TX_COMPLETE != i2c_event1) && timeout_ms1>0)
{
R_BSP_SoftwareDelay(1U, BSP_DELAY_UNITS_MICROSECONDS);
timeout_ms1--;
}
if (I2C_MASTER_EVENT_ABORTED == i2c_event1)
{
__BKPT(0);
}
/* Read data back from the I2C slave */
i2c_event1 = I2C_MASTER_EVENT_ABORTED;
timeout_ms1 = 100000;
/* Read data from I2C slave */
err = R_SCI_I2C_Read(&g_i2c0_ctrl, &value, 0x01, false);
assert(FSP_SUCCESS == err);
while ((I2C_MASTER_EVENT_RX_COMPLETE != i2c_event1) && timeout_ms1)
{
R_BSP_SoftwareDelay(1U, BSP_DELAY_UNITS_MILLISECONDS);
timeout_ms1--;
}
if (I2C_MASTER_EVENT_ABORTED == i2c_event1)
{
__BKPT(0);
}
i2c_event1 = I2C_MASTER_EVENT_ABORTED;
timeout_ms1 = 100000;
return value;
}
ISL29035初始化
- 读取设备ID,查看是否链接上
- 清除标志位
- 确保芯片处于停止模式
- 设置分辨率
- 设置模式,如单次模式
读取设备ID使用0x0F指令,可以判断DEVICE ID BITS (B3-B5),之后需要对BROWNOUT STATUS BIT - BOUT (B7)清0。

初始化的时候需要确保芯片处于停止模式,需要对0x00指令的OPERATION MODE BITS (B5-B7)写入000。

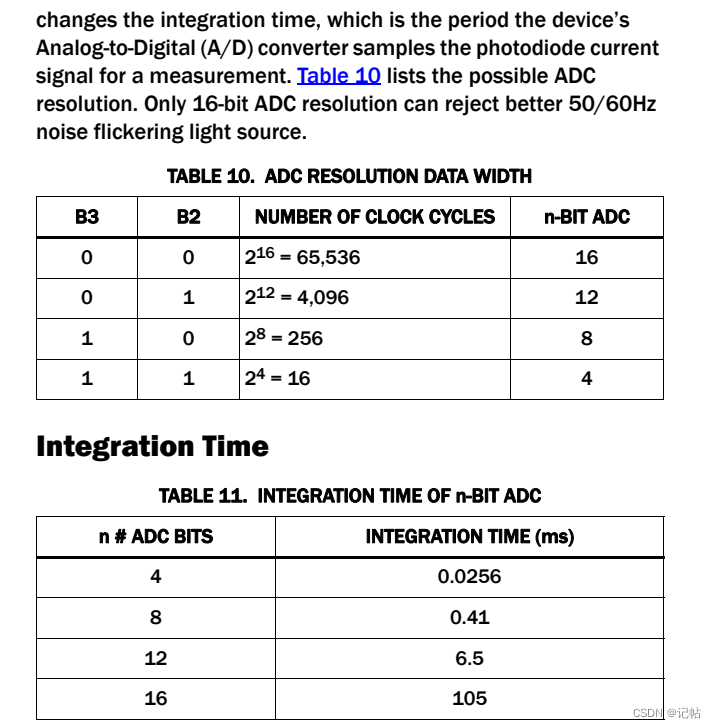
设置分辨率可以通过0x01指令,光照强度有4种模式,1k, 4k, 16k和64k,通过FULL SCALE LUX RANGE (B0-B1)进行设置;ADC分辨率也有4种模式,通过ADC RESOLUTION (B3-B2)进行设置。
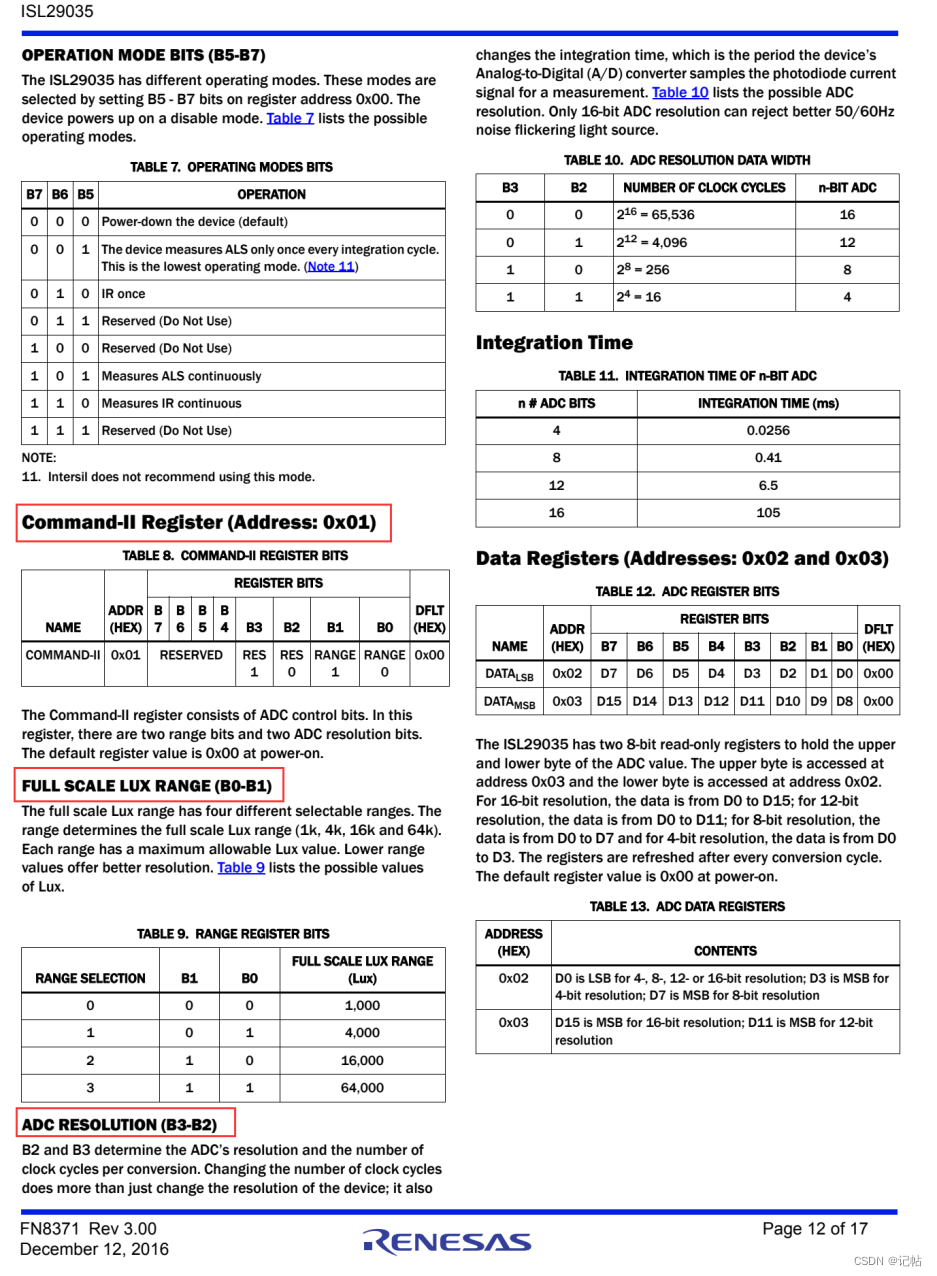
设置采样模式,可以通过0x00指令,对OPERATION MODE BITS (B5-B7)写入010。

int DigitalLightISL29035_init(void) {
uint8_t reg = 0;
reg= DigitalLightISL29035_readRegister( CHIP_ID);//CHIP_ID->0x0f
//Serial.println(reg, HEX);
uint8_t chip_id = (reg >> 3) & 0x7;
if (chip_id != 0x5) {
return -1;
}
//清除BOUT位
DigitalLightISL29035_writeRegister(CHIP_ID, reg & 0x7f);//CHIP_ID->0x0f
//确保芯片处于停止模式
DigitalLightISL29035_writeRegister( COMMAND_I, 0);//COMMAND_I->0x00
//设置分辨率
DigitalLightISL29035_writeRegister(COMMAND_II, full_scale_lux_range | (integration_time << 2) );//COMMAND_2->0x01
//设置为单次模式
DigitalLightISL29035_writeRegister( COMMAND_I, OPMODE_ALS_ONCE);//COMMAND_I->0x00
return 0;
}
ISL29035读取光照强度
设置采样模式,可以通过0x00指令,对OPERATION MODE BITS (B5-B7)写入010。

不同的ADC精度需要等待的时间不同,16位的等待时间最久,需要105ms。
对于读取数据,可以使用Data Registers (Addresses: 0x02 and 0x03),高位字节通过0x03读取,低位字节通过0x02读取,之后进行组合,就是完整的数据。
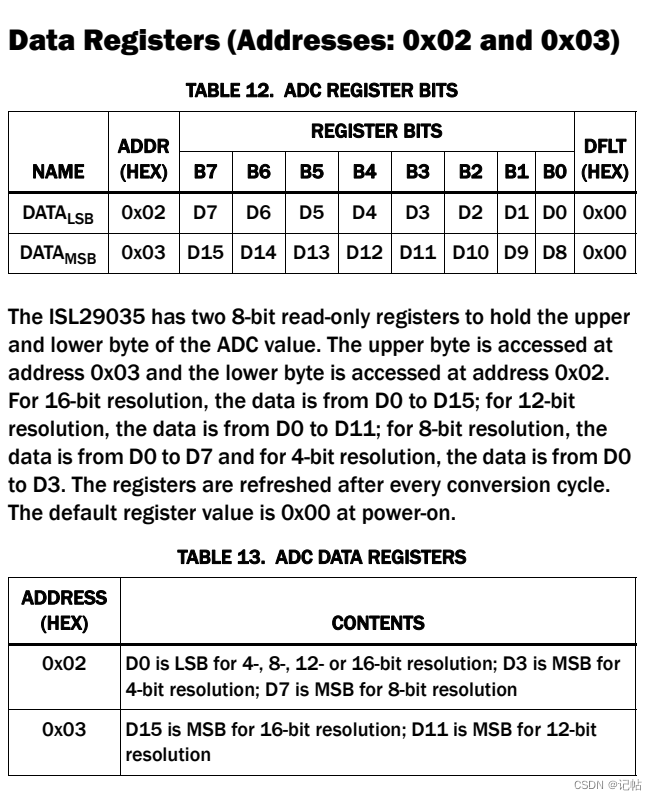
读取到原始数据之后,可以通过下面公式计算光照强度。

uint32_t DigitalLightISL29035_readIRLux(void) {
uint16_t data = 0;
uint8_t l, h;
//设置为单次模式
DigitalLightISL29035_writeRegister( COMMAND_I, OPMODE_ALS_ONCE);
//等待时间
if(integration_time==0)
{
R_BSP_SoftwareDelay(105, BSP_DELAY_UNITS_MILLISECONDS);
}
else if(integration_time==1 || integration_time==2)
{
R_BSP_SoftwareDelay(7, BSP_DELAY_UNITS_MILLISECONDS);
}
else if(integration_time==3)
{
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS);
}
l=DigitalLightISL29035_readRegister(DATA_L);//DATA_L->0x02
h=DigitalLightISL29035_readRegister(DATA_H);//DATA_H->0x03
data=(h << 8) | l;
uint32_t ranges=0;
if(full_scale_lux_range==0)
ranges=1000;
else if(full_scale_lux_range==1)
ranges=4000;
else if(full_scale_lux_range==2)
ranges=16000;
else if(full_scale_lux_range==3)
ranges=64000;
uint32_t adc_count_max=0;
if(integration_time==0)
adc_count_max=65536;
else if(integration_time==1)
adc_count_max=4096;
else if(integration_time==2)
adc_count_max=256;
else if(integration_time==3)
adc_count_max=16;
return ranges * (uint32_t)data /adc_count_max;
}
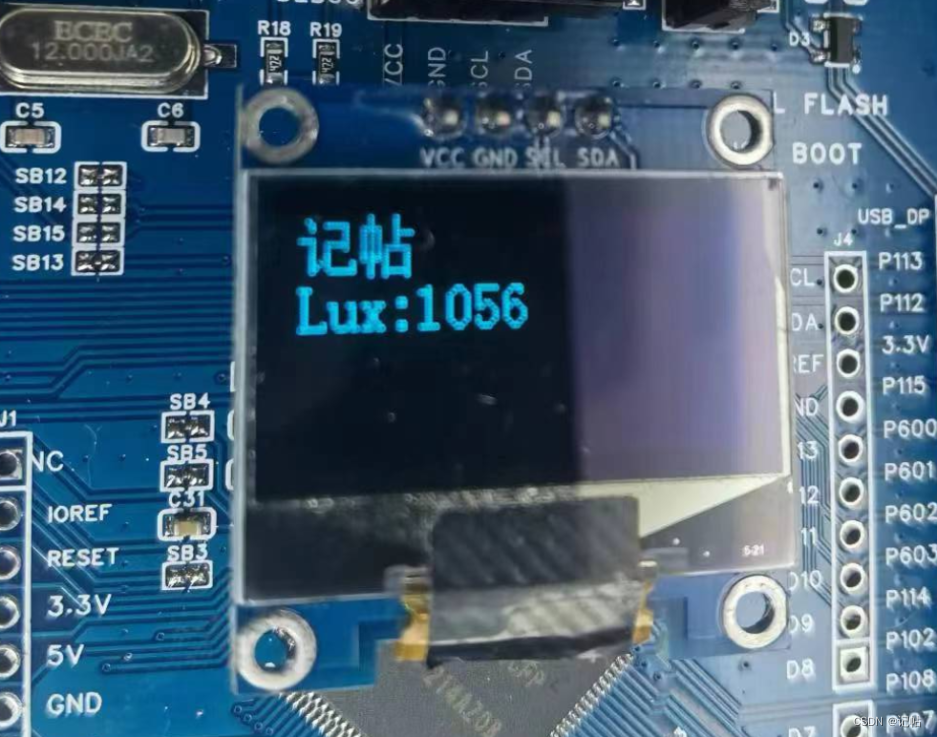
实现效果
正常显示数据。

同时可以通过串口打印数据。

由于设置光照采样为1K,故只能读取到999。

重新设置光照采样范围为4k,就可以读取0-4K的范围了,具体设置需要考虑使用环境。
主程序
#include "hal_data.h"
#include <stdio.h>
#include "Digital_Light_ISL29035.h"
#include "oled.h"
#include "bmp.h"
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
/* Callback function */
void user_uart_callback(uart_callback_args_t *p_args)
{
/* TODO: add your own code here */
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
/* Callback function */
i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED;
void sci_i2c_master_callback(i2c_master_callback_args_t *p_args)
{
i2c_event = I2C_MASTER_EVENT_ABORTED;
if (NULL != p_args)
{
/* capture callback event for validating the i2c transfer event*/
i2c_event = p_args->event;
}
}
/* Callback function */
i2c_master_event_t i2c_event1 = I2C_MASTER_EVENT_ABORTED;
void sci_i2c_master_callback0(i2c_master_callback_args_t *p_args)
{
/* TODO: add your own code here */
i2c_event1 = I2C_MASTER_EVENT_ABORTED;
if (NULL != p_args)
{
/* capture callback event for validating the i2c transfer event*/
i2c_event1 = p_args->event;
}
}
uint32_t timeout_ms = 100000;
uint32_t timeout_ms1 = 100000;
uint32_t lux =0;
/*******************************************************************************************************************//**
* main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function
* is called by main() when no RTOS is used.
**********************************************************************************************************************/
void hal_entry(void)
{
/* TODO: add your own code here */
/* Initialize the I2C module */
err = R_SCI_I2C_Open(&g_i2c3_ctrl, &g_i2c3_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Open the transfer instance with initial configuration. */
fsp_err_t err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
printf("hello world!\n");
/* Initialize the I2C module */
err = R_SCI_I2C_Open(&g_i2c0_ctrl, &g_i2c0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
DigitalLightISL29035_init();
R_BSP_SoftwareDelay(500U, BSP_DELAY_UNITS_MILLISECONDS);
lux = DigitalLightISL29035_readIRLux();
printf("lux=%d\n",lux);
OLED_Init(); //初始化OLED
OLED_Clear() ;
OLED_ShowCHinese(0,0,0);//记
OLED_ShowCHinese(16,0,1);//帖
OLED_ShowString(0,2,"Lux:",16);
OLED_ShowNum(32,2,lux,3,16);
/* Wait for minimum time required between transfers. */
R_BSP_SoftwareDelay(2, BSP_DELAY_UNITS_SECONDS);
while(1)
{
OLED_Clear() ;
OLED_ShowCHinese(0,0,0);//记
OLED_ShowCHinese(16,0,1);//帖
OLED_ShowString(0,2,"Lux:",16);
lux = DigitalLightISL29035_readIRLux();
if(lux<10)
OLED_ShowNum(32,2,lux,1,16);
else if(lux>=10&&lux<100)
OLED_ShowNum(32,2,lux,2,16);
else if(lux>=100&&lux<1000)
OLED_ShowNum(32,2,lux,3,16);
else if(lux>=1000&&lux<10000)
OLED_ShowNum(32,2,lux,4,16);
printf("lux=%d\n",lux);
R_BSP_SoftwareDelay(1000U, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}
Digital_Light_ISL29035.h
/*
* Digital_Light_ISL29035.h
*
* Created on: 2023年2月1日
* Author: a8456
*/
#ifndef DIGITAL_LIGHT_ISL29035_H_
#define DIGITAL_LIGHT_ISL29035_H_
#include "stdint.h"
#define ISL29035_I2C_ADDRESS 0x44 //the 7bits i2c address
#define COMMAND_I 0x00
#define COMMAND_II 0x01
#define DATA_L 0x02
#define DATA_H 0x03
#define INT_LT_L 0x04
#define INT_LT_H 0x05
#define INT_HT_L 0x06
#define INT_HT_H 0x07
#define CHIP_ID 0x0f
#define OPMODE_ALS_ONCE ((0x1)<<5)
#define OPMODE_IR_ONCE ((0x2)<<5)
#define OPMODE_ALS_CONTI ((0x5)<<5)
#define OPMODE_IR_CONTI ((0x6)<<5)
#define FULL_SCALE_LUX_RANGE0 1000
#define FULL_SCALE_LUX_RANGE1 4000
#define FULL_SCALE_LUX_RANGE2 16000
#define FULL_SCALE_LUX_RANGE3 64000
#define DEFAULT_LUX_RANGE_INDEX 1 //should be [0,3]
#define INTEGRATION_TIME3 0.0256 //ms, this also configure the ADC to 4bits
#define INTEGRATION_TIME2 0.41 //ms, this also configure the ADC to 8bits
#define INTEGRATION_TIME1 6.5 //ms, this also configure the ADC to 12bits
#define INTEGRATION_TIME0 105 //ms, this also configure the ADC to 16bits
#define DEFAULT_INTEGRATION_TIME_INDEX 1 //should be [0,3]
uint8_t DigitalLightISL29035_readRegister(uint8_t reg_address);
void DigitalLightISL29035_writeRegister( int reg_address, uint8_t val) ;
int DigitalLightISL29035_init(void) ;
uint32_t DigitalLightISL29035_readIRLux(void);
#endif /* DIGITAL_LIGHT_ISL29035_H_ */
![jstack排查cpu占用高[复习]](https://img-blog.csdnimg.cn/img_convert/90082021a89d218851ab2d74973542d4.png)