PyTorch学习笔记(一):PyTorch环境安装
往期学习资料推荐:
1.Pytorch实战笔记_GoAI的博客-CSDN博客
2.Pytorch入门教程_GoAI的博客-CSDN博客
安装参考:
1.视频教程:3分钟深度学习【环境搭建】CUDA +Anaconda 简单粗暴_哔哩哔哩】
2.windows10下CUDA11.1、cuDNN8.0、tensorflow-gpu2.4.1安装教程以及问题解决方法_3.Win10中CUDA、cuDNN的安装与卸载
4.Pytorch详细安装-强推!
1.安装CUDA
- 安装包下载地址(主博客在介绍版本选择的时候也有提到)
官网各种version的CUDA下载地址
官网各种cuDNN下载地址 - 打开“cuda_8.0.44_win10.exe”,此过程会很慢,耐心等待(这也提示我该换电脑了)

选择解压地址(反正是临时的,就C盘吧,问题不大)

开始解压(此过程依然很慢,特别是我的电脑那段时间不知道出了什么问题CPU和内存占用异常高,这个过程也是费了我很多时间)
解压完毕,加在安装程序

- 开始安装


4. 敲黑板了!这里千万不要选默认的精简,这里的精简应该改成全部才对(看下面的小字说明,这就是全家桶),倒不是说安装全家桶不可以,主要是有一个东西的安装会一直导致安装失败
特别是这个visual studio integration千万不能选!

选择以下的安装就够了

就装在C盘吧,之后别的地方路径啥的会方便一点

- 安装成功


- 验证安装成功
(1)环境变量应该已经自动加好

(2)cmd里查看版本信息nvcc -V
(3)进入到路径下后查看GPU运行时的监测界面
(4)运行bandwidthTest.exe(需要先进入到所在目录)

(5)运行deviceQuery.exe(需要先进入到所在目录)

2.安装cuDNN
官网各种cuDNN下载地址
cuDNN称不上安装,只需要将下载下来的压缩包解压后,将对应文件夹的文件放到CUDA安装路径下的对应文件夹里即可

3.卸载
cuDNN本来就只是将文件拷贝进CUDA的安装目录,故删除即可(卸载CUDA后直接删除整个文件夹也可以)
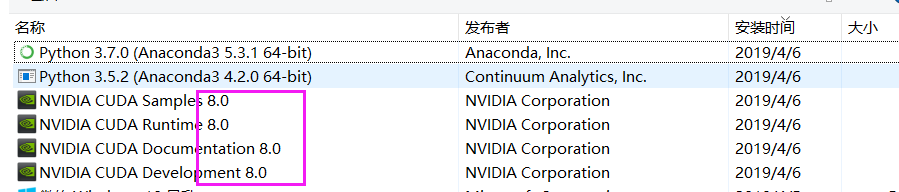
CUDA的卸载:控制面板-卸载程序(不要用360等杀毒软件,找不到对应程序的),按照安装时间排序,最上面这几个带版本号的,就是刚才安装的CUDA了,挨个卸载即可
PyTorch学习笔记(二):PyTorch简介与基础知识
1. PyTorch简介
- 概念:由Facebook人工智能研究小组开发的一种基于Lua编写的Torch库的Python实现的深度学习库
- 优势:简洁、上手快、具有良好的文档和社区支持、项目开源、支持代码调试、丰富的扩展库
2 PyTorch基础知识
2.1张量
- 分类:0维张量(标量)、1维张量(向量)、2维张量(矩阵)、3维张量(时间序列)、4维张量(图像)、5维张量(视频)
- 概念:一个数据容器,可以包含数据、字符串等
import torch
# 创建tensor
x = torch.rand(4, 3)
print(x)
# 构造数据类型为long,数据是0的矩阵
x = torch.zeros(4, 3, dtype=torch.long)
print(x)
tensor([[0.9515, 0.6332, 0.8228],
[0.3508, 0.0493, 0.7606],
[0.7326, 0.7003, 0.1925],
[0.1172, 0.8946, 0.9501]])
tensor([[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0]])
-
常见的构造Tensor的函数:
函数 功能 Tensor(*sizes) 基础构造函数 tensor(data) 类似于np.array ones(*sizes) 全1 zeros(*sizes) 全0 eye(*sizes) 对角为1,其余为0 arange(s,e,step) 从s到e,步长为step linspace(s,e,steps) 从s到e,均匀分成step份 rand/randn(*sizes) rand是[0,1)均匀分布;randn是服从N(0,1)的正态分布 normal(mean,std) 正态分布(均值为mean,标准差是std) randperm(m) 随机排列 -
操作:
- 使用索引表示的变量与原数据共享内存,即修改其中一个,另一个也会被修改
- 使用
torch.view改变tensor的大小 - 广播机制:当对两个形状不同的Tensor按元素运算时,可能会触发广播(broadcasting)机制
# 使用view改变张量的大小
x = torch.randn(5, 4)
y = x.view(20)
z = x.view(-1, 5) # -1是指这一维的维数由其他维度决定
print(x.size(), y.size(), z.size())
torch.Size([5, 4]) torch.Size([20]) torch.Size([4, 5])
x = tensor([[1, 2]])
y = tensor([[1],
[2],
[3]])
x + y = tensor([[2, 3],
[3, 4],
[4, 5]])
2.2 自动求导
autograd包:提供张量上的自动求导机制- 原理:如果设置
.requires_grad为True,那么将会追踪张量的所有操作。当完成计算后,可以通过调用.backward()自动计算所有的梯度。张量的所有梯度将会自动累加到.grad属性 Function:Tensor和Function互相连接生成了一个无环图 (acyclic graph),它编码了完整的计算历史。每个张量都有一个.grad_fn属性,该属性引用了创建Tensor自身的Function
x = torch.ones(2, 2, requires_grad=True)
print(x)
tensor([[1., 1.],
[1., 1.]], requires_grad=True)
y = x ** 2
print(y)
tensor([[1., 1.],
[1., 1.]], grad_fn=<PowBackward0>)
z = y * y * 3
out = z.mean()
print("z = ", z)
print("z mean = ", out)
z = tensor([[3., 3.],
[3., 3.]], grad_fn=<MulBackward0>)
z mean = tensor(3., grad_fn=<MeanBackward0>)
grad的反向传播:运行反向传播,梯度都会累加之前的梯度,所以一般在反向传播之前需把梯度清零
out.backward()
print(x.grad)
tensor([[3., 3.],
[3., 3.]])
# 反向传播累加
out2 = x.sum()
out2.backward()
print(x.grad)
tensor([[4., 4.],
[4., 4.]])
2.3并行计算
-
目的:通过使用多个GPU参与训练,加快训练速度,提高模型学习的效果
-
CUDA:通过使用NVIDIA提供的GPU并行计算框架,采用
cuda()方法,让模型或者数据迁移到GPU中进行计算 -
并行计算方法:
- Network partitioning:将一个模型网络的各部分拆分,分配到不同的GPU中,执行不同的计算任务
- Layer-wise partitioning:将同一层模型拆分,分配到不同的GPU中,训练同一层模型的部分任务
- Data parallelism(主流):将不同的数据分配到不同的GPU中,执行相同的任务
PyTorch学习笔记(三):PyTorch主要组成模块
往期学习资料推荐:
1.Pytorch实战笔记_GoAI的博客-CSDN博客
2.Pytorch入门教程_GoAI的博客-CSDN博客
1 深度学习步骤
(1)数据预处理:通过专门的数据加载,通过批训练提高模型表现,每次训练读取固定数量的样本输入到模型中进行训练
(2)深度神经网络搭建:逐层搭建,实现特定功能的层(如积层、池化层、批正则化层、LSTM层等)
(3)损失函数和优化器的设定:保证反向传播能够在用户定义的模型结构上实现
(4)模型训练:使用并行计算加速训练,将数据按批加载,放入GPU中训练,对损失函数反向传播回网络最前面的层,同时使用优化器调整网络参数
2 基本配置
- 导入相关的包
import os
import numpy as py
import torch
import torch.nn as nn
from torch.utils.data
import Dataset, DataLoader
import torch.optim as optimizer
- 统一设置超参数:batch size、初始学习率、训练次数、GPU配置
# set batch size
batch_size = 16
# 初始学习率
lr = 1e-4
# 训练次数
max_epochs = 100
# 配置GPU
device = torch.device("cuda:1" if torch.cuda.is_available() else "cpu")
device
device(type='cuda', index=1)
3 数据读入
-
读取方式:通过Dataset+DataLoader的方式加载数据,Dataset定义好数据的格式和数据变换形式,DataLoader用iterative的方式不断读入批次数据。
-
自定义Dataset类:实现
__init___、__getitem__、__len__函数 -
torch.utils.data.DataLoader参数:- batch_size:样本是按“批”读入的,表示每次读入的样本数
- num_workers:表示用于读取数据的进程数
- shuffle:是否将读入的数据打乱
- drop_last:对于样本最后一部分没有达到批次数的样本,使其不再参与训练
4 模型构建
4.1 神经网络的构造
通过Module类构造模型,实例化模型之后,可完成模型构造
# 构造多层感知机
class MLP(nn.Module):
def __init__(self, **kwargs):
super(MLP, self).__init__(**kwargs)
self.hidden = nn.Linear(784, 256)
self.act = nn.ReLU()
self.output = nn.Linear(256, 10)
def forward(self, X):
o = self.act(self.hidden(x))
return self.output(o)
x = torch.rand(2, 784)
net = MLP()
print(x)
net(x)
tensor([[0.8924, 0.9624, 0.3262, ..., 0.8376, 0.1889, 0.9060],
[0.3609, 0.8005, 0.5175, ..., 0.6255, 0.1462, 0.9846]])
tensor([[-0.0902, 0.0199, 0.0677, -0.0679, 0.0799, 0.0826, 0.0628, 0.1809,
-0.2387, 0.0366],
[-0.2271, 0.0056, -0.0984, -0.0432, -0.0160, -0.0038, 0.0953, 0.0545,
-0.1530, -0.0214]], grad_fn=<AddmmBackward>)
4.2 神经网络常见的层
- 不含模型参数的层
# 构造一个输入减去均值后输出的层
class MyLayer(nn.Module):
def __init__(self, **kwargs):
super(MyLayer, self).__init__(**kwargs)
def forward(self, x):
return x - x.mean()
x = torch.tensor([0, 5, 10, 15, 20], dtype=torch.float)
layer = MyLayer()
layer(x)
tensor([-10., -5., 0., 5., 10.])
- 含模型参数的层:如果一个
Tensor是Parameter,那么它会⾃动被添加到模型的参数列表里
# 使用ParameterList定义参数的列表
class MyListDense(nn.Module):
def __init__(self):
super(MyListDense, self).__init__()
self.params = nn.ParameterList(
[nn.Parameter(torch.randn(4, 4)) for i in range(3)])
self.params.append(nn.Parameter(torch.randn(4, 1)))
def forward(self, x):
for i in range(len(self.params)):
x = torch.mm(x, self.params[i])
return x
net = MyListDense()
print(net)
MyListDense(
(params): ParameterList(
(0): Parameter containing: [torch.FloatTensor of size 4x4]
(1): Parameter containing: [torch.FloatTensor of size 4x4]
(2): Parameter containing: [torch.FloatTensor of size 4x4]
(3): Parameter containing: [torch.FloatTensor of size 4x1]
)
)
# 使用ParameterDict定义参数的字典
class MyDictDense(nn.Module):
def __init__(self):
super(MyDictDense, self).__init__()
self.params = nn.ParameterDict({
'linear1': nn.Parameter(torch.randn(4, 4)),
'linear2': nn.Parameter(torch.randn(4, 1))
})
# 新增参数linear3
self.params.update({'linear3': nn.Parameter(torch.randn(4, 2))})
def forward(self, x, choice='linear1'):
return torch.mm(x, self.params[choice])
net = MyDictDense()
print(net)
MyDictDense(
(params): ParameterDict(
(linear1): Parameter containing: [torch.FloatTensor of size 4x4]
(linear2): Parameter containing: [torch.FloatTensor of size 4x1]
(linear3): Parameter containing: [torch.FloatTensor of size 4x2]
)
)
- 二维卷积层:使用
nn.Conv2d类构造,模型参数包括卷积核和标量偏差,在训练模式时,通常先对卷积核随机初始化,再不断迭代卷积核和偏差
# 计算卷积层,对输入和输出做相应的升维和降维
def comp_conv2d(conv2d, X):
# (1, 1)代表批量大小和通道数
X = X.view((1, 1) + X.shape)
Y = conv2d(X)
# 排除不关心的前两维:批量和通道
return Y.view(Y.shape[2:])
# 注意这里是两侧分别填充1⾏或列,所以在两侧一共填充2⾏或列
conv2d = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3,padding=1)
X = torch.rand(8, 8)
comp_conv2d(conv2d, X).shape
torch.Size([8, 8])
- 池化层:直接计算池化窗口内元素的最大值或者平均值,分别叫做最大池化或平均池化
# 二维池化层
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i: i + p_h, j: j + p_w].max()
elif mode == 'avg':
Y[i, j] = X[i: i + p_h, j: j + p_w].mean()
return Y
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]], dtype=torch.float)
pool2d(X, (2, 2), 'max')
tensor([[4., 5.],
[7., 8.]])
pool2d(X, (2, 2), 'avg')
tensor([[2., 3.],
[5., 6.]])
4.3 模型示例
-
神经网络训练过程:
- 定义可学习参数的神经网络
- 在输入数据集上进行迭代训练
- 通过神经网络处理输入数据
- 计算loss(损失值)
- 将梯度反向传播给神经网络参数
- 更新网络参数,使用梯度下降
-
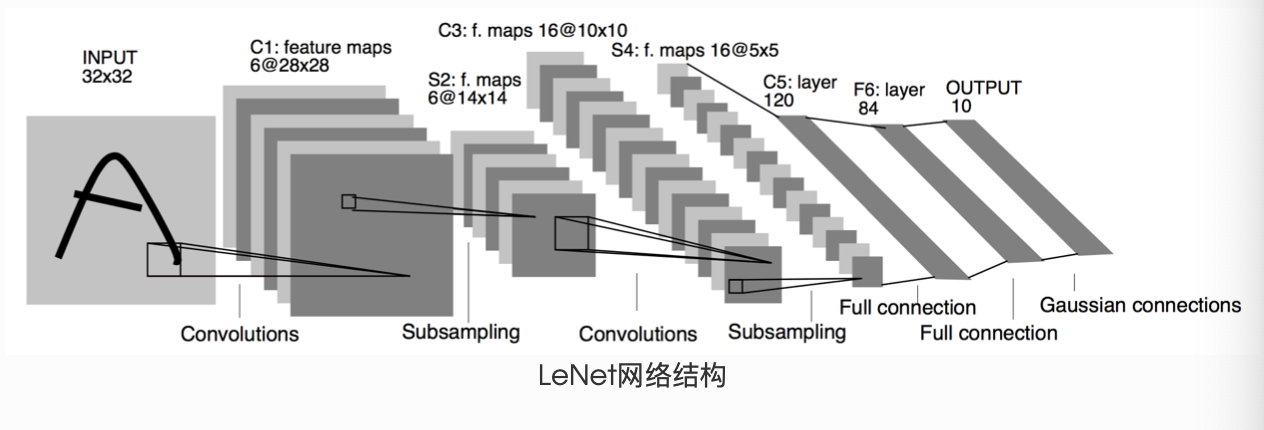
LeNet(前馈神经网络)
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 输入图像channel是1;输出channel是6;5x5卷积核
self.conv1 = nn.Conv2d(1, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
# an affine operation: y = Wx + b
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
# 2x2 Max pooling
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
# 如果是方阵,则可以只使用一个数字进行定义
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
x = x.view(-1, self.num_flat_features(x))
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
def num_flat_features(self, x):
# 除去批处理维度的其他所有维度
size = x.size()[1:]
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
net
Net(
(conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(fc1): Linear(in_features=400, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=10, bias=True)
)
# 假设输入的数据为随机的32x32
input = torch.randn(1, 1, 32, 32)
out = net(input)
print(out)
tensor([[-0.0921, -0.0605, -0.0726, -0.0451, 0.1399, -0.0087, 0.1075, 0.0799,
-0.1472, 0.0288]], grad_fn=<AddmmBackward>)
# 清零所有参数的梯度缓存,然后进行随机梯度的反向传播
net.zero_grad()
out.backward(torch.randn(1, 10))
- AlexNet
class AlexNet(nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.conv = nn.Sequential(
# in_channels, out_channels, kernel_size, stride, padding
nn.Conv2d(1, 96, 11, 4),
nn.ReLU(),
# kernel_size, stride
nn.MaxPool2d(3, 2),
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(3, 2),
# 连续3个卷积层,且使用更小的卷积窗口。
# 除了最后的卷积层外,进一步增大了输出通道数。
# 前两个卷积层后不使用池化层来减小输入的高和宽
nn.Conv2d(256, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 256, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(3, 2)
)
# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合
self.fc = nn.Sequential(
nn.Linear(256*5*5, 4096),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(4096, 4096),
nn.ReLU(),
nn.Dropout(0.5),
# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10),
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
net = AlexNet()
print(net)
AlexNet(
(conv): Sequential(
(0): Conv2d(1, 96, kernel_size=(11, 11), stride=(4, 4))
(1): ReLU()
(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(96, 256, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(4): ReLU()
(5): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(256, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU()
(8): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): ReLU()
(10): Conv2d(384, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU()
(12): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): Linear(in_features=6400, out_features=4096, bias=True)
(1): ReLU()
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU()
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=10, bias=True)
)
)
5 损失函数
- 二分类交叉熵损失函数:
torch.nn.BCELoss,用于计算二分类任务时的交叉熵
m = nn.Sigmoid()
loss = nn.BCELoss()
input = torch.randn(3, requires_grad=True)
target = torch.empty(3).random_(2)
output = loss(m(input), target)
output.backward()
print('BCE损失函数的计算结果:',output)
BCE损失函数的计算结果: tensor(0.9389, grad_fn=<BinaryCrossEntropyBackward>)
- 交叉熵损失函数:
torch.nn.CrossEntropyLoss,用于计算交叉熵
loss = nn.CrossEntropyLoss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.empty(3, dtype=torch.long).random_(5)
output = loss(input, target)
output.backward()
print('CrossEntropy损失函数的计算结果:',output)
CrossEntropy损失函数的计算结果: tensor(2.7367, grad_fn=<NllLossBackward>)
- L1损失函数:
torch.nn.L1Loss,用于计算输出y和真实值target之差的绝对值
loss = nn.L1Loss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)
output = loss(input, target)
output.backward()
print('L1损失函数的计算结果:',output)
L1损失函数的计算结果: tensor(1.0351, grad_fn=<L1LossBackward>)
- MSE损失函数:torch.nn.MSELoss,用于计算输出y和真实值target之差的平方
loss = nn.MSELoss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)
output = loss(input, target)
output.backward()
print('MSE损失函数的计算结果:',output)
MSE损失函数的计算结果: tensor(1.7612, grad_fn=<MseLossBackward>)
- 平滑L1(Smooth L1)损失函数:
torch.nn.SmoothL1Loss,用于计算L1的平滑输出,减轻离群点带来的影响,通过与L1损失的比较,在0点的尖端处,过渡更为平滑
loss = nn.SmoothL1Loss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)
output = loss(input, target)
output.backward()
print('Smooth L1损失函数的计算结果:',output)
Smooth L1损失函数的计算结果: tensor(0.7252, grad_fn=<SmoothL1LossBackward>)
- 目标泊松分布的负对数似然损失:
torch.nn.PoissonNLLLoss
loss = nn.PoissonNLLLoss()
log_input = torch.randn(5, 2, requires_grad=True)
target = torch.randn(5, 2)
output = loss(log_input, target)
output.backward()
print('PoissonNL损失函数的计算结果:',output)
PoissonNL损失函数的计算结果: tensor(1.7593, grad_fn=<MeanBackward0>)
- KL散度:
torch.nn.KLDivLoss,用于连续分布的距离度量,可用在对离散采用的连续输出空间分布的回归场景
inputs = torch.tensor([[0.5, 0.3, 0.2], [0.2, 0.3, 0.5]])
target = torch.tensor([[0.9, 0.05, 0.05], [0.1, 0.7, 0.2]], dtype=torch.float)
loss = nn.KLDivLoss(reduction='batchmean')
output = loss(inputs,target)
print('KLDiv损失函数的计算结果:',output)
KLDiv损失函数的计算结果: tensor(-1.0006)
- MarginRankingLoss:
torch.nn.MarginRankingLoss,用于计算两组数据之间的差异(相似度),可使用在排序任务的场景
= nn.MarginRankingLoss() = torch.randn(3, requires_grad=True) = torch.randn(3, requires_grad=True) = torch.randn(3).sign() = loss(input1, input2, target).backward()('MarginRanking损失函数的计算结果:',output)
MarginRanking损失函数的计算结果: tensor(1.1762, grad_fn=<MeanBackward0>)
- 多标签边界损失函数:
torch.nn.MultiLabelMarginLoss,用于计算多标签分类问题的损失
loss = nn.MarginRankingLoss()
input1 = torch.randn(3, requires_grad=True)
input2 = torch.randn(3, requires_grad=True)
target = torch.randn(3).sign()
output = loss(input1, input2, target)
output.backward()
print('MarginRanking损失函数的计算结果:',output)
MultiLabelMargin损失函数的计算结果: tensor(0.4500)
- 二分类损失函数:
torch.nn.SoftMarginLoss,用于计算二分类的logistic损失
loss = nn.MultiLabelMarginLoss()
x = torch.FloatTensor([[0.9, 0.2, 0.4, 0.8]])
# 真实的分类是,第3类和第0类
y = torch.LongTensor([[3, 0, -1, 1]])
output = loss(x, y)
print('MultiLabelMargin损失函数的计算结果:',output)
SoftMargin损失函数的计算结果: tensor(0.6764)
- 多分类的折页损失函数:
torch.nn.MultiMarginLoss,用于计算多分类问题的折页损失
inputs = torch.tensor([[0.3, 0.7], [0.5, 0.5]])
target = torch.tensor([0, 1], dtype=torch.long)
loss_f = nn.MultiMarginLoss()
output = loss_f(inputs, target)
print('MultiMargin损失函数的计算结果:',output)
MultiMargin损失函数的计算结果: tensor(0.6000)
- 三元组损失函数:
torch.nn.TripletMarginLoss,用于处理<实体1,关系,实体2>类型的数据,计算该类型数据的损失
triplet_loss = nn.TripletMarginLoss(margin=1.0, p=2)
anchor = torch.randn(100, 128, requires_grad=True)
positive = torch.randn(100, 128, requires_grad=True)
negative = torch.randn(100, 128, requires_grad=True)
output = triplet_loss(anchor, positive, negative)
output.backward()
print('TripletMargin损失函数的计算结果:',output)
TripletMargin损失函数的计算结果: tensor(1.1507, grad_fn=<MeanBackward0>)
- HingEmbeddingLoss:
torch.nn.HingeEmbeddingLoss,用于计算输出的embedding结果的Hing损失
loss_f = nn.HingeEmbeddingLoss()
inputs = torch.tensor([[1., 0.8, 0.5]])
target = torch.tensor([[1, 1, -1]])
output = loss_f(inputs,target)
print('HingEmbedding损失函数的计算结果:',output)
HingEmbedding损失函数的计算结果: tensor(0.7667)
- 余弦相似度:
torch.nn.CosineEmbeddingLoss,用于计算两个向量的余弦相似度,如果两个向量距离近,则损失函数值小,反之亦然
loss_f = nn.CosineEmbeddingLoss()
inputs_1 = torch.tensor([[0.3, 0.5, 0.7], [0.3, 0.5, 0.7]])
inputs_2 = torch.tensor([[0.1, 0.3, 0.5], [0.1, 0.3, 0.5]])
target = torch.tensor([1, -1], dtype=torch.float)
output = loss_f(inputs_1,inputs_2,target)
print('CosineEmbedding损失函数的计算结果:',output)
CosineEmbedding损失函数的计算结果: tensor(0.5000)
- CTC损失函数:
torch.nn.CTCLoss,用于处理时序数据的分类问题,计算连续时间序列和目标序列之间的损失
# Target are to be padded
# 序列长度
T = 50
# 类别数(包括空类)
C = 20
# batch size
N = 16
# Target sequence length of longest target in batch (padding length)
S = 30
# Minimum target length, for demonstration purposes
S_min = 10
input = torch.randn(T, N, C).log_softmax(2).detach().requires_grad_()
# 初始化target(0 = blank, 1:C = classes)
target = torch.randint(low=1, high=C, size=(N, S), dtype=torch.long)
input_lengths = torch.full(size=(N,), fill_value=T, dtype=torch.long)
target_lengths = torch.randint(low=S_min, high=S, size=(N,), dtype=torch.long)
ctc_loss = nn.CTCLoss()
loss = ctc_loss(input, target, input_lengths, target_lengths)
loss.backward()
print('CTC损失函数的计算结果:',loss)
CTC损失函数的计算结果: tensor(6.1333, grad_fn=<MeanBackward0>)
6 优化器
6.1 Optimizer的属性和方法
-
使用方向:为了使求解参数过程更快,使用BP+优化器逼近求解
-
Optimizer的属性:
defaults:优化器的超参数state:参数的缓存param_groups:参数组,顺序是params,lr,momentum,dampening,weight_decay,nesterov
-
Optimizer的方法:
zero_grad():清空所管理参数的梯度step():执行一步梯度更新add_param_group():添加参数组load_state_dict():加载状态参数字典,可以用来进行模型的断点续训练,继续上次的参数进行训练state_dict():获取优化器当前状态信息字典
6.2 基本操作
# 设置权重,服从正态分布 --> 2 x 2
weight = torch.randn((2, 2), requires_grad=True)
# 设置梯度为全1矩阵 --> 2 x 2
weight.grad = torch.ones((2, 2))
# 输出现有的weight和data
print("The data of weight before step:\n{}".format(weight.data))
print("The grad of weight before step:\n{}".format(weight.grad))
The data of weight before step:
tensor([[-0.5871, -1.1311],
[-1.0446, 0.2656]])
The grad of weight before step:
tensor([[1., 1.],
[1., 1.]])
# 实例化优化器
optimizer = torch.optim.SGD([weight], lr=0.1, momentum=0.9)
# 进行一步操作
optimizer.step()
# 查看进行一步后的值,梯度
print("The data of weight after step:\n{}".format(weight.data))
print("The grad of weight after step:\n{}".format(weight.grad))
The data of weight after step:
tensor([[-0.6871, -1.2311],
[-1.1446, 0.1656]])
The grad of weight after step:
tensor([[1., 1.],
[1., 1.]])
# 权重清零
optimizer.zero_grad()
# 检验权重是否为0
print("The grad of weight after optimizer.zero_grad():\n{}".format(weight.grad))
The grad of weight after optimizer.zero_grad():
tensor([[0., 0.],
[0., 0.]])
# 添加参数:weight2
weight2 = torch.randn((3, 3), requires_grad=True)
optimizer.add_param_group({"params": weight2, 'lr': 0.0001, 'nesterov': True})
# 查看现有的参数
print("optimizer.param_groups is\n{}".format(optimizer.param_groups))
# 查看当前状态信息
opt_state_dict = optimizer.state_dict()
print("state_dict before step:\n", opt_state_dict)
optimizer.param_groups is
[{'params': [tensor([[-0.6871, -1.2311],
[-1.1446, 0.1656]], requires_grad=True)], 'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False}, {'params': [tensor([[ 0.0411, -0.6569, 0.7445],
[-0.7056, 1.1146, -0.4409],
[-0.2302, -1.1507, -1.3807]], requires_grad=True)], 'lr': 0.0001, 'nesterov': True, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0}]
state_dict before step:
{'state': {0: {'momentum_buffer': tensor([[1., 1.],
[1., 1.]])}}, 'param_groups': [{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params': [0]}, {'lr': 0.0001, 'nesterov': True, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'params': [1]}]}
# 进行5次step操作
for _ in range(50):
optimizer.step()
# 输出现有状态信息
print("state_dict after step:\n", optimizer.state_dict())
state_dict after step:
{'state': {0: {'momentum_buffer': tensor([[0.0052, 0.0052],
[0.0052, 0.0052]])}}, 'param_groups': [{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params': [0]}, {'lr': 0.0001, 'nesterov': True, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'params': [1]}]}
7 训练与评估
def train(epoch):
# 设置训练状态
model.train()
train_loss = 0
# 循环读取DataLoader中的全部数据
for data, label in train_loader:
# 将数据放到GPU用于后续计算
data, label = data.cuda(), label.cuda()
# 将优化器的梯度清0
optimizer.zero_grad()
# 将数据输入给模型
output = model(data)
# 设置损失函数
loss = criterion(label, output)
# 将loss反向传播给网络
loss.backward()
# 使用优化器更新模型参数
optimizer.step()
# 累加训练损失
train_loss += loss.item()*data.size(0)
train_loss = train_loss/len(train_loader.dataset)
print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, train_loss))
def val(epoch):
# 设置验证状态
model.eval()
val_loss = 0
# 不设置梯度
with torch.no_grad():
for data, label in val_loader:
data, label = data.cuda(), label.cuda()
output = model(data)
preds = torch.argmax(output, 1)
loss = criterion(output, label)
val_loss += loss.item()*data.size(0)
# 计算准确率
running_accu += torch.sum(preds == label.data)
val_loss = val_loss/len(val_loader.dataset)
print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, val_loss))
PyTorch学习笔记(四):PyTorch基础实战
通过一个基础实战案例,结合前面所涉及的PyTorch入门知识。本次任务是对10个类别的“时装”图像进行分类,使用FashionMNIST数据集(fashion-mnist/data/fashion at master · zalandoresearch/fashion-mnist · GitHub
FashionMNIST数据集中包含已经预先划分好的训练集和测试集,其中训练集共60,000张图像,测试集共10,000张图像。每张图像均为单通道黑白图像,大小为32*32pixel,分属10个类别。
1.导入必要****的包
import os
import numpy as np
import pandas as pd
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import Dataset, DataLoader
2 配置训练环境和超参数
# 配置GPU,这里有两种方式
## 方案一:使用os.environ
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
# 方案二:使用“device”,后续对要使用GPU的变量用.to(device)即可
#device = torch.device("cuda:1" if torch.cuda.is_available() else "cpu")
## 配置其他超参数,如batch_size, num_workers, learning rate, 以及总的epochs
batch_size = 256
num_workers = 4 # 对于Windows用户,这里应设置为0,否则会出现多线程错误
lr = 1e-4
epochs = 20
3 数据读取和加载
这里同时展示两种方式:
- 下载并使用PyTorch提供的内置数据集
- 从网站下载以csv格式存储的数据,读入并转成预期的格式
第一种数据读入方式只适用于常见的数据集,如MNIST,CIFAR10等,PyTorch官方提供了数据下载。这种方式往往适用于快速测试方法(比如测试下某个idea在MNIST数据集上是否有效)
第二种数据读入方式需要自己构建Dataset,这对于PyTorch应用于自己的工作中十分重要
同时,还需要对数据进行必要的变换,比如说需要将图片统一为一致的大小,以便后续能够输入网络训练;需要将数据格式转为Tensor类,等等。
from torchvision import transforms
# 设置数据变换
image_size = 28
data_transform = transforms.Compose([
transforms.ToPILImage(), # 这一步取决于后续的数据读取方式,如果使用内置数据集则不需要
transforms.Resize(image_size),
transforms.ToTensor()
])
## 读取方式一:使用torchvision自带数据集,下载可能需要一段时间
from torchvision import datasets
train_data = datasets.FashionMNIST(root='./', train=True, download=True, transform=data_transform)
test_data = datasets.FashionMNIST(root='./', train=False, download=True, transform=data_transform)
## 读取方式二:读入csv格式的数据,自行构建Dataset类,即自定义数据集
# csv数据下载链接:https://www.kaggle.com/zalando-research/fashionmnist
class FMDataset(Dataset):
def __init__(self, df, transform=None):
self.df = df
self.transform = transform
self.images = df.iloc[:,1:].values.astype(np.uint8)
self.labels = df.iloc[:, 0].values
def __len__(self):
return len(self.images)
def __getitem__(self, idx):
image = self.images[idx].reshape(28,28,1)
label = int(self.labels[idx])
if self.transform is not None:
image = self.transform(image)
else:
image = torch.tensor(image/255., dtype=torch.float)
label = torch.tensor(label, dtype=torch.long)
return image, label
train_df = pd.read_csv("./FashionMNIST/fashion-mnist_train.csv")
test_df = pd.read_csv("./FashionMNIST/fashion-mnist_test.csv")
train_data = FMDataset(train_df, data_transform)
test_data = FMDataset(test_df, data_transform)
在构建训练和测试数据集完成后,需要定义DataLoader类,以便在训练和测试时加载数据
train_loader = DataLoader(train_data, batch_size=batch_size, shuffle=True, num_workers=num_workers, drop_last=True)
test_loader = DataLoader(test_data, batch_size=batch_size, shuffle=False, num_workers=num_workers)
读入后,我们可以做一些数据可视化操作,主要是验证我们读入的数据是否正确
import matplotlib.pyplot as plt
image, label = next(iter(train_loader))
print(image.shape, label.shape)
plt.imshow(image[0][0], cmap="gray")
torch.Size([256, 1, 28, 28]) torch.Size([256])
<matplotlib.image.AxesImage at 0x1b39b49fcc8>

4.模型设计
# 使用CNN
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 32, 5),
nn.ReLU(),
nn.MaxPool2d(2, stride=2),
nn.Dropout(0.3),
nn.Conv2d(32, 64, 5),
nn.ReLU(),
nn.MaxPool2d(2, stride=2),
nn.Dropout(0.3)
)
self.fc = nn.Sequential(
nn.Linear(64*4*4, 512),
nn.ReLU(),
nn.Linear(512, 10)
)
def forward(self, x):
x = self.conv(x)
x = x.view(-1, 64*4*4)
x = self.fc(x)
# x = nn.functional.normalize(x)
return x
model = Net()
model = model.cuda()
5 设置损失函数和优化器
使用torch.nn模块自带的CrossEntropy损失。
PyTorch会自动把整数型的label转为one-hot型,用于计算CE loss
这里需要确保label是从0开始的,同时模型不加softmax层(使用logits计算),这也说明了PyTorch训练中各个部分不是独立的,需要通盘考虑。
# 使用交叉熵损失函数
criterion = nn.CrossEntropyLoss()
# 使用Adam优化器
optimizer = optim.Adam(model.parameters(), lr=0.001)
6.训练与测试
各自封装成函数,方便后续调用
关注两者的主要区别:
- 模型状态设置
- 是否需要初始化优化器
- 是否需要将loss传回到网络
- 是否需要每步更新optimizer
此外,对于测试或验证过程,可以计算分类准确率。
训练:
def train(epoch):
# 设置训练状态
model.train()
train_loss = 0
# 循环读取DataLoader中的全部数据
for data, label in train_loader:
# 将数据放到GPU用于后续计算
data, label = data.cuda(), label.cuda()
# 将优化器的梯度清0
optimizer.zero_grad()
# 将数据输入给模型
output = model(data)
# 设置损失函数
loss = criterion(output, label)
# 将loss反向传播给网络
loss.backward()
# 使用优化器更新模型参数
optimizer.step()
# 累加训练损失
train_loss += loss.item() * data.size(0)
train_loss = train_loss/len(train_loader.dataset)
print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, train_loss))
验证:
def val(epoch):
# 设置验证状态
model.eval()
val_loss = 0
gt_labels = []
pred_labels = []
# 不设置梯度
with torch.no_grad():
for data, label in test_loader:
data, label = data.cuda(), label.cuda()
output = model(data)
preds = torch.argmax(output, 1)
gt_labels.append(label.cpu().data.numpy())
pred_labels.append(preds.cpu().data.numpy())
loss = criterion(output, label)
val_loss += loss.item()*data.size(0)
# 计算验证集的平均损失
val_loss = val_loss/len(test_loader.dataset)
gt_labels, pred_labels = np.concatenate(gt_labels), np.concatenate(pred_labels)
# 计算准确率
acc = np.sum(gt_labels==pred_labels)/len(pred_labels)
print('Epoch: {} \tValidation Loss: {:.6f}, Accuracy: {:6f}'.format(epoch, val_loss, acc))
for epoch in range(1, epochs+1):
train(epoch)
val(epoch)
Epoch: 1 Training Loss: 0.664049
Epoch: 1 Validation Loss: 0.421500, Accuracy: 0.852400
Epoch: 2 Training Loss: 0.417311
Epoch: 2 Validation Loss: 0.349790, Accuracy: 0.871200
Epoch: 3 Training Loss: 0.355448
Epoch: 3 Validation Loss: 0.318987, Accuracy: 0.879500
Epoch: 4 Training Loss: 0.323644
Epoch: 4 Validation Loss: 0.290521, Accuracy: 0.893800
Epoch: 5 Training Loss: 0.301900
Epoch: 5 Validation Loss: 0.266420, Accuracy: 0.901300
Epoch: 6 Training Loss: 0.286696
Epoch: 6 Validation Loss: 0.246448, Accuracy: 0.909700
Epoch: 7 Training Loss: 0.271441
Epoch: 7 Validation Loss: 0.241845, Accuracy: 0.911200
Epoch: 8 Training Loss: 0.260185
Epoch: 8 Validation Loss: 0.243311, Accuracy: 0.910800
Epoch: 9 Training Loss: 0.247986
Epoch: 9 Validation Loss: 0.225896, Accuracy: 0.916200
Epoch: 10 Training Loss: 0.240718
Epoch: 10 Validation Loss: 0.227848, Accuracy: 0.914700
Epoch: 11 Training Loss: 0.232358
Epoch: 11 Validation Loss: 0.220180, Accuracy: 0.917500
Epoch: 12 Training Loss: 0.223933
Epoch: 12 Validation Loss: 0.215308, Accuracy: 0.919400
Epoch: 13 Training Loss: 0.218354
Epoch: 13 Validation Loss: 0.211890, Accuracy: 0.919300
Epoch: 14 Training Loss: 0.210027
Epoch: 14 Validation Loss: 0.209707, Accuracy: 0.922700
Epoch: 15 Training Loss: 0.203024
Epoch: 15 Validation Loss: 0.208233, Accuracy: 0.925600
Epoch: 16 Training Loss: 0.196965
Epoch: 16 Validation Loss: 0.208209, Accuracy: 0.921900
Epoch: 17 Training Loss: 0.193155
Epoch: 17 Validation Loss: 0.200000, Accuracy: 0.926100
Epoch: 18 Training Loss: 0.184376
Epoch: 18 Validation Loss: 0.197259, Accuracy: 0.926200
Epoch: 19 Training Loss: 0.184272
Epoch: 19 Validation Loss: 0.200259, Accuracy: 0.926000
Epoch: 20 Training Loss: 0.172641
Epoch: 20 Validation Loss: 0.200177, Accuracy: 0.927100
7.模型保存
训练完成后,可以使用torch.save保存模型参数或者整个模型,也可以在训练过程中保存模型
save_path = "./FahionModel.pkl"
torch.save(model, save_path)
PyTorch学习笔记(五):模型定义、修改、保存
一、PyTorch模型定义的方式
- Module 类是 torch.nn 模块里提供的一个模型构造类 (nn.Module),是所有神经⽹网络模块的基类,我们可以继承它来定义我们想要的模型;
- PyTorch模型定义应包括两个主要部分:各个部分的初始化(_init_);数据流向定义(forward)
基于nn.Module,可以通过Sequential,ModuleList和ModuleDict三种方式定义PyTorch模型。
1.Sequential
对应模块为nn.Sequential()。
当模型的前向计算为简单串联各个层的计算时, Sequential 类可以通过更加简单的方式定义模型。它可以接收一个子模块的有序字典(OrderedDict) 或者一系列子模块作为参数来逐一添加 Module 的实例,⽽模型的前向计算就是将这些实例按添加的顺序逐⼀计算。我们结合Sequential和定义方式加以理解:
class MySequential(nn.Module):
from collections import OrderedDict
def __init__(self, *args):
super(MySequential, self).__init__()
if len(args) == 1 and isinstance(args[0], OrderedDict): # 如果传入的是一个OrderedDict
for key, module in args[0].items():
self.add_module(key, module) # add_module方法会将module添加进self._modules(一个OrderedDict)
else: # 传入的是一些Module
for idx, module in enumerate(args):
self.add_module(str(idx), module)
def forward(self, input):
# self._modules返回一个 OrderedDict,保证会按照成员添加时的顺序遍历成
for module in self._modules.values():
input = module(input)
return input
下面来看下如何使用Sequential来定义模型。只需要将模型的层按序排列起来即可,根据层名的不同,排列的时候有两种方式:
import torch.nn as nn
net = nn.Sequential(
nn.Linear(784, 256),
nn.ReLU(),
nn.Linear(256, 10),
)
print(net)
Sequential(
(0): Linear(in_features=784, out_features=256, bias=True)
(1): ReLU()
(2): Linear(in_features=256, out_features=10, bias=True)
)
import collections
import torch.nn as nn
net2 = nn.Sequential(collections.OrderedDict([
('fc1', nn.Linear(784, 256)),
('relu1', nn.ReLU()),
('fc2', nn.Linear(256, 10))
]))
print(net2)
Sequential(
(fc1): Linear(in_features=784, out_features=256, bias=True)
(relu1): ReLU()
(fc2): Linear(in_features=256, out_features=10, bias=True)
)
可以看到,使用Sequential定义模型的好处在于简单、易读,同时使用Sequential定义的模型不需要再写forward,因为顺序已经定义好了。但使用Sequential也会使得模型定义丧失灵活性,比如需要在模型中间加入一个外部输入时就不适合用Sequential的方式实现。使用时需根据实际需求加以选择。
2.ModuleList
对应模块为nn.ModuleList()。
ModuleList 接收一个子模块(或层,需属于nn.Module类)的列表作为输入,然后也可以类似List那样进行append和extend操作。同时,子模块或层的权重也会自动添加到网络中来。
net = nn.ModuleList([nn.Linear(784, 256), nn.ReLU()])
net.append(nn.Linear(256, 10)) # # 类似List的append操作
print(net[-1]) # 类似List的索引访问
print(net)
Linear(in_features=256, out_features=10, bias=True)
ModuleList(
(0): Linear(in_features=784, out_features=256, bias=True)
(1): ReLU()
(2): Linear(in_features=256, out_features=10, bias=True)
)
要特别注意的是,nn.ModuleList 并没有定义一个网络,它只是将不同的模块储存在一起。ModuleList中元素的先后顺序并不代表其在网络中的真实位置顺序,需要经过forward函数指定各个层的先后顺序后才算完成了模型的定义。具体实现时用for循环即可完成:
class model(nn.Module):
def __init__(self, ...):
self.modulelist = ...
...
def forward(self, x):
for layer in self.modulelist:
x = layer(x)
return x
3.ModuleDict
对应模块为nn.ModuleDict()。
ModuleDict和ModuleList的作用类似,只是ModuleDict能够更方便地为神经网络的层添加名称。
net = nn.ModuleDict({
'linear': nn.Linear(784, 256),
'act': nn.ReLU(),
})
net['output'] = nn.Linear(256, 10) # 添加
print(net['linear']) # 访问
print(net.output)
print(net)
Linear(in_features=784, out_features=256, bias=True)
Linear(in_features=256, out_features=10, bias=True)
ModuleDict(
(act): ReLU()
(linear): Linear(in_features=784, out_features=256, bias=True)
(output): Linear(in_features=256, out_features=10, bias=True)
)
三种方法的比较总结
- Sequential适用于快速验证结果,不需要同时写__init__和forward;
- ModuleList和ModuleDict在某个完全相同的层需要重复出现多次时,非常方便实现,可以”一行顶多行“;
- 当我们需要之前层的信息的时候,比如 ResNets 中的残差计算,当前层的结果需要和之前层中的结果进行融合,一般使用 ModuleList/ModuleDict 比较方便。
二、利用模型块快速搭建复杂网络
模型搭建基本方法:
- 模型块分析
- 模型块实现
- 利用模型块组装模型
以U-Net模型为例,该模型为分割模型,通过残差连接结构解决了模型学习中的退化问题,使得神经网络的深度能够不断扩展。

模型块分析
- 每个子块内部的两次卷积
DoubleConv - 左侧模型块之间的下采样连接
Down,通过Max pooling来实现 - 右侧模型块之间的上采样连接
Up - 输出层的处理
OutConv - 模型块之间的横向连接,输入和U-Net底部的连接等计算,这些单独的操作可以通过forward函数来实现
模型块实现
以U-net为例:
# 两次卷积 conv 3x3, ReLU
class DoubleConv(nn.Module):
"""(convolution => [BN] => ReLU) * 2"""
def __init__(self, in_channels, out_channels, mid_channels=None):
super().__init__()
if not mid_channels:
mid_channels = out_channels
self.double_conv = nn.Sequential(
nn.Conv2d(in_channels, mid_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(mid_channels),
nn.ReLU(inplace=True),
nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.double_conv(x)
# 下采样 max pool 2x2
class Down(nn.Module):
"""Downscaling with maxpool then double conv"""
def __init__(self, in_channels, out_channels):
super().__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2),
DoubleConv(in_channels, out_channels)
)
def forward(self, x):
return self.maxpool_conv(x)
# 上采样 up-conv 2x2
class Up(nn.Module):
"""Upscaling then double conv"""
def __init__(self, in_channels, out_channels, bilinear=True):
super().__init__()
# if bilinear, use the normal convolutions to reduce the number of channels
if bilinear:
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
self.conv = DoubleConv(in_channels, out_channels, in_channels // 2)
else:
self.up = nn.ConvTranspose2d(in_channels, in_channels // 2, kernel_size=2, stride=2)
self.conv = DoubleConv(in_channels, out_channels)
def forward(self, x1, x2):
x1 = self.up(x1)
# input is CHW
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
x = torch.cat([x2, x1], dim=1)
# 输出 conv 1x1
class OutConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)
利用模型块组装U-net模型
class UNet(nn.Module):
def __init__(self, n_channels, n_classes, bilinear=True):
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = DoubleConv(n_channels, 64)
self.down1 = Down(64, 128)
self.down2 = Down(128, 256)
self.down3 = Down(256, 512)
factor = 2 if bilinear else 1
self.down4 = Down(512, 1024 // factor)
self.up1 = Up(1024, 512 // factor, bilinear)
self.up2 = Up(512, 256 // factor, bilinear)
self.up3 = Up(256, 128 // factor, bilinear)
self.up4 = Up(128, 64, bilinear)
self.outc = OutConv(64, n_classes)
def forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits
三、PyTorch修改模型
1.模型层
以pytorch中torchvision库预定义好的模型ResNet50为例,模型参数如下:
import torchvision.models as models
net = models.resnet50()
print(net)
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
..............
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=2048, out_features=1000, bias=True)
)
为了适配ImageNet预训练的权重,因此最后全连接层(fc)的输出节点数是1000。假设我们要用这个resnet模型去做一个10分类的问题,就应该修改模型的fc层,将其输出节点数替换为10。另外,我们觉得一层全连接层可能太少了,想再加一层。
可以做如下修改:
from collections import OrderedDict
classifier = nn.Sequential(OrderedDict([('fc1', nn.Linear(2048, 128)),
('relu1', nn.ReLU()),
('dropout1',nn.Dropout(0.5)),
('fc2', nn.Linear(128, 10)),
('output', nn.Softmax(dim=1))
]))
net.fc = classifier
这里的操作相当于将模型(net)最后名称为“fc”的层替换成了名称为“classifier”的结构,该结构是我们自己定义的。这里使用了Sequential+OrderedDict的模型定义方式,现在的模型就可以去做10分类任务了。
2.添加外部输入
有时候在模型训练中,除了已有模型的输入之外,还需要输入额外的信息。比如在CNN网络中,我们除了输入图像,还需要同时输入图像对应的其他信息,这时候就需要在已有的CNN网络中添加额外的输入变量。基本思路是:将原模型添加输入位置前的部分作为一个整体,同时在forward中定义好原模型不变的部分、添加的输入和后续层之间的连接关系,从而完成模型的修改。
我们以torchvision的resnet50模型为基础,任务还是10分类任务。不同点在于,我们希望利用已有的模型结构,在倒数第二层增加一个额外的输入变量add_variable来辅助预测。具体实现如下:
class Model(nn.Module):
def __init__(self, net):
super(Model, self).__init__()
self.net = net
self.relu = nn.ReLU()
self.dropout = nn.Dropout(0.5)
self.fc_add = nn.Linear(1001, 10, bias=True)
self.output = nn.Softmax(dim=1)
def forward(self, x, add_variable):
x = self.net(x)
x = torch.cat((self.dropout(self.relu(x)), add_variable.unsqueeze(1)),1)
x = self.fc_add(x)
x = self.output(x)
return x
这里的实现要点是通过torch.cat实现了tensor的拼接。torchvision中的resnet50输出是一个1000维的tensor,我们通过修改forward函数(配套定义一些层),先将2048维的tensor通过激活函数层和dropout层,再和外部输入变量"add_variable"拼接,最后通过全连接层映射到指定的输出维度10。
另外这里对外部输入变量"add_variable"进行unsqueeze操作是为了和net输出的tensor保持维度一致,常用于add_variable是单一数值 (scalar) 的情况,此时add_variable的维度是 (batch_size, ),需要在第二维补充维数1,从而可以和tensor进行torch.cat操作。对于unsqueeze操作可以复习下2.1节的内容和配套代码 😃
之后对我们修改好的模型结构进行实例化,就可以使用了:
import torchvision.models as models
net = models.resnet50()
model = Model(net).cuda()
另外别忘了,训练中在输入数据的时候要给两个inputs:
outputs = model(inputs, add_var)
3.添加额外输出
有时候在模型训练中,除了模型最后的输出外,我们需要输出模型某一中间层的结果,以施加额外的监督,获得更好的中间层结果。基本的思路是修改模型定义中forward函数的return变量。
我们依然以resnet50做10分类任务为例,在已经定义好的模型结构上,同时输出1000维的倒数第二层和10维的最后一层结果。具体实现如下:
class Model(nn.Module):
def __init__(self, net):
super(Model, self).__init__()
self.net = net
self.relu = nn.ReLU()
self.dropout = nn.Dropout(0.5)
self.fc1 = nn.Linear(1000, 10, bias=True)
self.output = nn.Softmax(dim=1)
def forward(self, x, add_variable):
x1000 = self.net(x)
x10 = self.dropout(self.relu(x1000))
x10 = self.fc1(x10)
x10 = self.output(x10)
return x10, x1000
之后对我们修改好的模型结构进行实例化,就可以使用了:
import torchvision.models as models
net = models.resnet50()
model = Model(net).cuda()
#另外别忘了,训练中在输入数据后会有两个outputs:
out10, out1000 = model(inputs, add_var)
四、PyTorch模型保存与读取
1.模型存储格式
PyTorch存储模型主要采用pkl,pt,pth三种格式。就使用层面来说没有区别,这里不做具体的讨论。本节最后的参考内容中列出了查阅到的一些资料,感兴趣的读者可以进一步研究,欢迎留言讨论。
3.模型存储内容
一个PyTorch模型主要包含两个部分:模型结构和权重。其中模型是继承nn.Module的类,权重的数据结构是一个字典(key是层名,value是权重向量)。存储也由此分为两种形式:存储整个模型(包括结构和权重),和只存储模型权重。
from torchvision import models
model = models.resnet152(pretrained=True)
# 保存整个模型
torch.save(model, save_dir)
# 保存模型权重
torch.save(model.state_dict, save_dir)
对于PyTorch而言,pt, pth和pkl三种数据格式均支持模型权重和整个模型存储,使用上没有差别。
保存+读取整个模型
torch.save(model, save_dir)
loaded_model = torch.load(save_dir)
loaded_model.cuda()
保存+读取模型权重
torch.save(model.state_dict(), save_dir)
loaded_dict = torch.load(save_dir)
loaded_model = models.resnet152() #注意这里需要对模型结构有定义
loaded_model.state_dict = loaded_dict
loaded_model.cuda()
模型保存文章推荐:阿里云登录 - 欢迎登录阿里云,安全稳定的云计算服务平台
PyTorch学习笔记(六):PyTorch进阶训练技巧
import torch
import torch.nn as nn
import torch.nn.functional as F
1 自定义损失函数
-
以函数方式定义:通过输出值和目标值进行计算,返回损失值
-
以类方式定义:通过继承
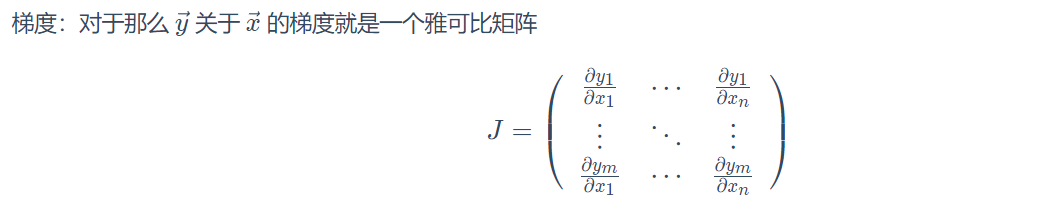
nn.Module,将其当做神经网络的一层来看待
以DiceLoss损失函数为例,定义如下:
DSC = \frac{2|X∩Y|}{|X|+|Y|}DSC=∣X∣+∣Y∣2∣X∩Y∣
class DiceLoss(nn.Module):
def __init__(self, weight=None, size_average=True):
super(DiceLoss,self).__init__()
def forward(self, inputs, targets, smooth=1):
inputs = F.sigmoid(inputs)
inputs = inputs.view(-1)
targets = targets.view(-1)
intersection = (inputs * targets).sum()
dice = (2.*intersection + smooth)/(inputs.sum() + targets.sum() + smooth)
return 1 - dice
2 动态调整学习率
-
Scheduler:学习率衰减策略,解决学习率选择的问题,用于提高精度
-
PyTorch Scheduler策略:
- lr_scheduler.LambdaLR
- lr_scheduler.MultiplicativeLR
- lr_scheduler.StepLR
- lr_scheduler.MultiStepLR
- lr_scheduler.ExponentialLR
- lr_scheduler.CosineAnnealingLR
- lr_scheduler.ReduceLROnPlateau
- lr_scheduler.CyclicLR
- lr_scheduler.OneCycleLR
- lr_scheduler.CosineAnnealingWarmRestarts
-
使用说明:需要将
scheduler.step()放在optimizer.step()后面 -
自定义Scheduler:通过自定义函数对学习率进行修改
3 模型微调
-
概念:找到一个同类已训练好的模型,调整模型参数,使用数据进行训练。
-
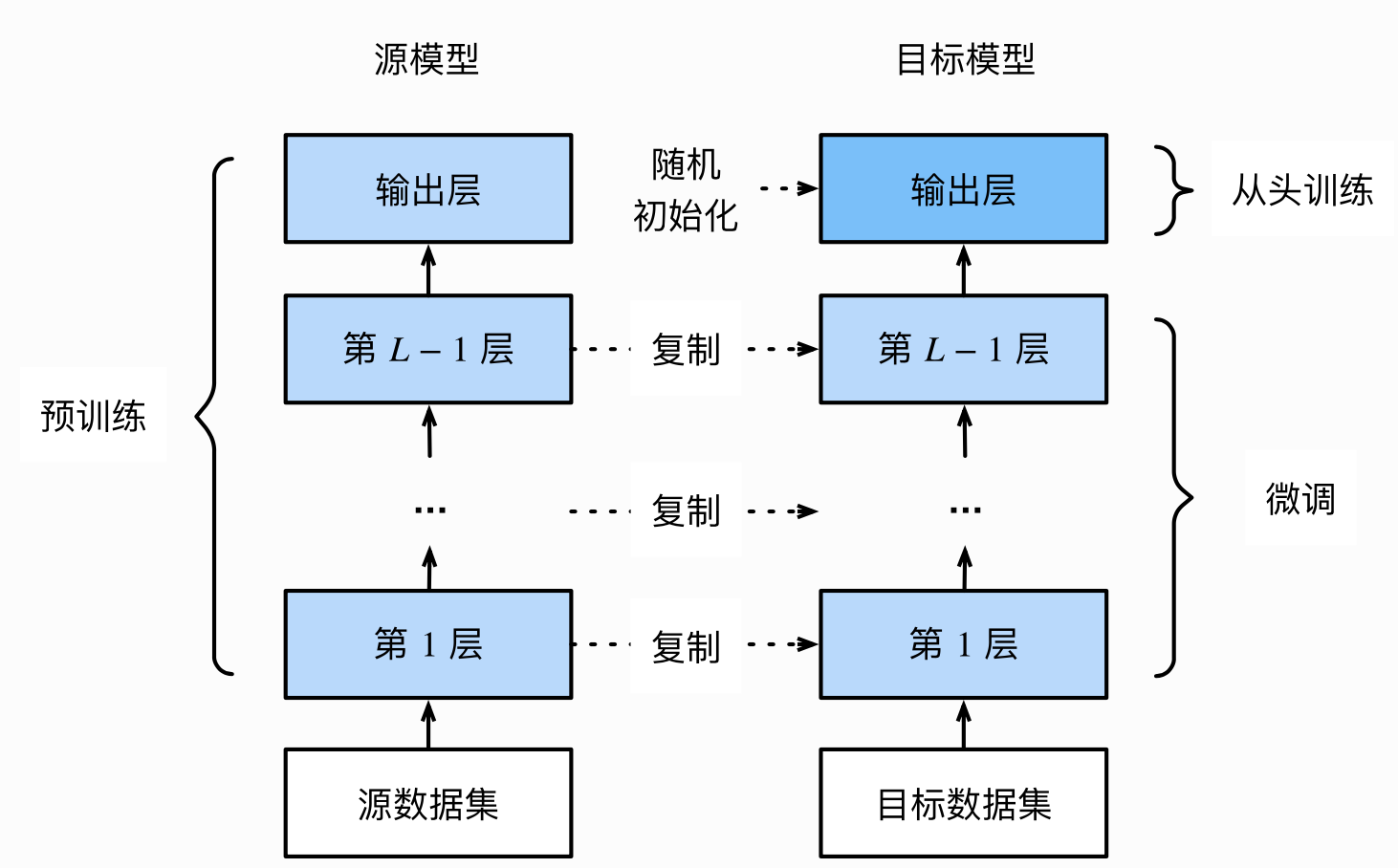
模型微调的流程
- 在源数据集上预训练一个神经网络模型,即源模型
- 创建一个新的神经网络模型,即目标模型,该模型复制了源模型上除输出层外的所有模型设计和参数
- 给目标模型添加一个输出大小为目标数据集类别个数的输出层,并随机初始化改成的模型参数
- 使用目标数据集训练目标模型
-
使用已有模型结构:通过传入
pretrained参数,决定是否使用预训练好的权重 -
训练特定层:使用
requires_grad=False冻结部分网络层,只计算新初始化的层的梯度def set_parameter_requires_grad(model, feature_extracting): if feature_extracting: for param in model.parameters(): param.requires_grad = False
import torchvision.models as models
冻结参数的梯度
feature_extract = True
model = models.resnet50(pretrained=True)
set_parameter_requires_grad(model, feature_extract)
修改模型
num_ftrs = model.fc.in_features
model.fc = nn.Linear(in_features=512, out_features=4, bias=True)
model.fc
Linear(in_features=512, out_features=4, bias=True)
```
注:在训练过程中,model仍会回传梯度,但是参数更新只会发生在`fc`层。
4 半精度训练
-
半精度优势:减少显存占用,提高GPU同时加载的数据量
-
设置半精度训练:
- 导入
torch.cuda.amp的autocast包 - 在模型定义中的
forward函数上,设置autocast装饰器 - 在训练过程中,在数据输入模型之后,添加
with autocast()
- 导入
-
适用范围:适用于数据的size较大的数据集(比如3D图像、视频等)
5 总结
- 自定义损失函数可以通过二种方式:函数方式和类方式,建议全程使用PyTorch提供的张量计算方法。
- 通过使用PyTorch中的scheduler动态调整学习率,也支持自定义scheduler
- 模型微调主要使用已有的预训练模型,调整其中的参数构建目标模型,在目标数据集上训练模型。
- 半精度训练主要适用于数据的size较大的数据集(比如3D图像、视频等)。
PyTorch学习笔记(七):PyTorch可视化_
1 可视化网络结构
- 打印模型基础信息:使用
print()函数,只能打印出基础构件的信息,不能显示每一层的shape和对应参数量的大小
import torchvision.models as models
model = models.resnet18()
print(model)
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)
- 可视化网络结构:使用
torchinfo库进行模型网络的结构输出,可以得到更加详细的信息,包括模块信息(每一层的类型、输出shape和参数量)、模型整体的参数量、模型大小、一次前向或者反向传播需要的内存大小等
import torchvision.models as models
from torchinfo import summary
resnet18 = models.resnet18() # 实例化模型
# 其中batch_size为1,图片的通道数为3,图片的高宽为224
summary(model, (1, 3, 224, 224))
==========================================================================================
Layer (type:depth-idx) Output Shape Param #
==========================================================================================
ResNet -- --
├─Conv2d: 1-1 [1, 64, 112, 112] 9,408
├─BatchNorm2d: 1-2 [1, 64, 112, 112] 128
├─ReLU: 1-3 [1, 64, 112, 112] --
├─MaxPool2d: 1-4 [1, 64, 56, 56] --
├─Sequential: 1-5 [1, 64, 56, 56] --
│ └─BasicBlock: 2-1 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-1 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-2 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-3 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-4 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-5 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-6 [1, 64, 56, 56] --
│ └─BasicBlock: 2-2 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-7 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-8 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-9 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-10 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-11 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-12 [1, 64, 56, 56] --
├─Sequential: 1-6 [1, 128, 28, 28] --
│ └─BasicBlock: 2-3 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-13 [1, 128, 28, 28] 73,728
│ │ └─BatchNorm2d: 3-14 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-15 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-16 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-17 [1, 128, 28, 28] 256
│ │ └─Sequential: 3-18 [1, 128, 28, 28] 8,448
│ │ └─ReLU: 3-19 [1, 128, 28, 28] --
│ └─BasicBlock: 2-4 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-20 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-21 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-22 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-23 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-24 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-25 [1, 128, 28, 28] --
├─Sequential: 1-7 [1, 256, 14, 14] --
│ └─BasicBlock: 2-5 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-26 [1, 256, 14, 14] 294,912
│ │ └─BatchNorm2d: 3-27 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-28 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-29 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-30 [1, 256, 14, 14] 512
│ │ └─Sequential: 3-31 [1, 256, 14, 14] 33,280
│ │ └─ReLU: 3-32 [1, 256, 14, 14] --
│ └─BasicBlock: 2-6 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-33 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-34 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-35 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-36 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-37 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-38 [1, 256, 14, 14] --
├─Sequential: 1-8 [1, 512, 7, 7] --
│ └─BasicBlock: 2-7 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-39 [1, 512, 7, 7] 1,179,648
│ │ └─BatchNorm2d: 3-40 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-41 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-42 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-43 [1, 512, 7, 7] 1,024
│ │ └─Sequential: 3-44 [1, 512, 7, 7] 132,096
│ │ └─ReLU: 3-45 [1, 512, 7, 7] --
│ └─BasicBlock: 2-8 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-46 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-47 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-48 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-49 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-50 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-51 [1, 512, 7, 7] --
├─AdaptiveAvgPool2d: 1-9 [1, 512, 1, 1] --
├─Linear: 1-10 [1, 1000] 513,000
==========================================================================================
Total params: 11,689,512
Trainable params: 11,689,512
Non-trainable params: 0
Total mult-adds (G): 1.81
==========================================================================================
Input size (MB): 0.60
Forward/backward pass size (MB): 39.75
Params size (MB): 46.76
Estimated Total Size (MB): 87.11
==========================================================================================
Copy to clipboardErrorCopied
2 CNN可视化
- CNN卷积核可视化
model = models.vgg11(pretrained=True)
dict(model.features.named_children())
{'0': Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'1': ReLU(inplace=True),
'2': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'3': Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'4': ReLU(inplace=True),
'5': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'6': Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'7': ReLU(inplace=True),
'8': Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'9': ReLU(inplace=True),
'10': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'11': Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'12': ReLU(inplace=True),
'13': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'14': ReLU(inplace=True),
'15': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'16': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'17': ReLU(inplace=True),
'18': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'19': ReLU(inplace=True),
'20': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)}
import matplotlib.pyplot as plt
conv1 = dict(model.features.named_children())['3']
# 得到第3层的卷积层参数
kernel_set = conv1.weight.detach()
num = len(conv1.weight.detach())
print(kernel_set.shape)
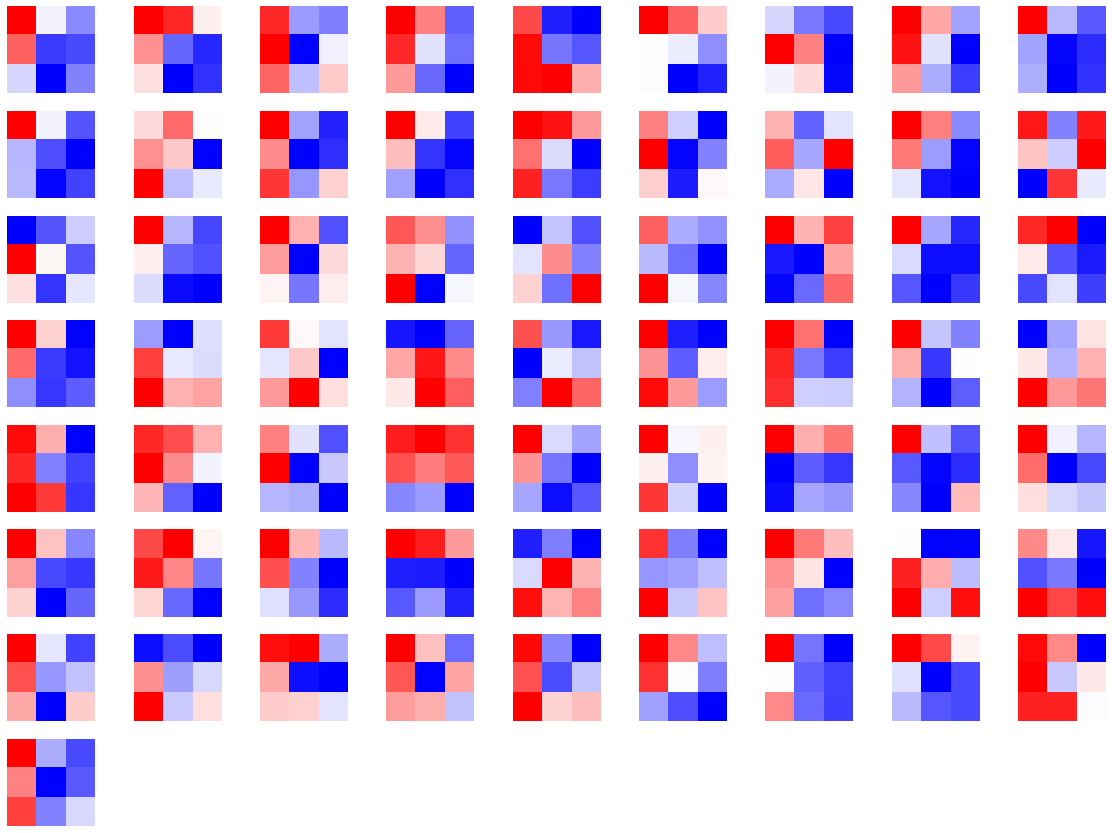
# 该代码仅可视化其中一个维度的卷积核,第3层的卷积核有128*64个
for i in range(0, 1):
i_kernel = kernel_set[i]
plt.figure(figsize=(20, 17))
if (len(i_kernel)) > 1:
for idx, filer in enumerate(i_kernel):
plt.subplot(9, 9, idx+1)
plt.axis('off')
plt.imshow(filer[ :, :].detach(),cmap='bwr')
torch.Size([128, 64, 3, 3])
-
CNN特征图可视化:使用PyTorch提供的hook结构,得到网络在前向传播过程中的特征图。
-
CNN class activation map可视化:用于在CNN可视化场景下,判断图像中哪些像素点对预测结果是重要的,可使用
grad-cam库进行操作 -
使用FlashTorch快速实现CNDD可视化:可以使用
flashtorch库,可视化梯度和卷积核
3 使用TensorBoard可视化训练过程
-
可视化基本逻辑:TensorBoard记录模型每一层的feature map、权重和训练loss等,并保存在用户指定的文件夹中,通过网页形式进行可视化展示
-
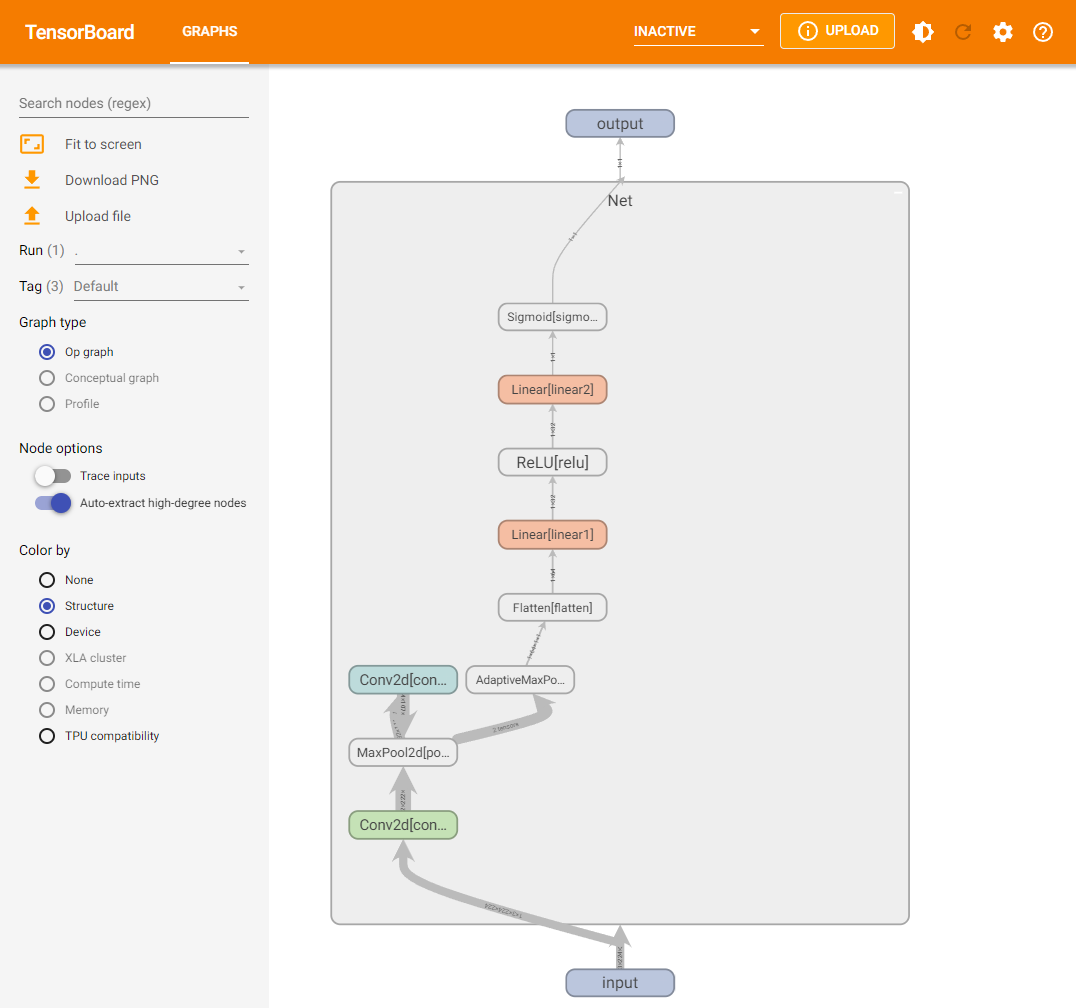
模型结构可视化:使用
add_graph方法,在TensorBoard下展示模型结构
import torch.nn as nn
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3,out_channels=32,kernel_size = 3)
self.pool = nn.MaxPool2d(kernel_size = 2,stride = 2)
self.conv2 = nn.Conv2d(in_channels=32,out_channels=64,kernel_size = 5)
self.adaptive_pool = nn.AdaptiveMaxPool2d((1,1))
self.flatten = nn.Flatten()
self.linear1 = nn.Linear(64,32)
self.relu = nn.ReLU()
self.linear2 = nn.Linear(32,1)
self.sigmoid = nn.Sigmoid()
def forward(self,x):
x = self.conv1(x)
x = self.pool(x)
x = self.conv2(x)
x = self.pool(x)
x = self.adaptive_pool(x)
x = self.flatten(x)
x = self.linear1(x)
x = self.relu(x)
x = self.linear2(x)
y = self.sigmoid(x)
return y
model = Net()
print(model)
Net(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1))
(pool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1))
(adaptive_pool): AdaptiveMaxPool2d(output_size=(1, 1))
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear1): Linear(in_features=64, out_features=32, bias=True)
(relu): ReLU()
(linear2): Linear(in_features=32, out_features=1, bias=True)
(sigmoid): Sigmoid()
)
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter('./runs')
writer.add_graph(model, input_to_model = torch.rand(1, 3, 224, 224))
writer.close()
在当前目录下,执行tensorboard --logdir=./runs命令,打开TensorBoard可视化页面,看到模型网络结构。
-
图像可视化:
- 对于单张图片的显示使用
add_image - 对于多张图片的显示使用
add_images - 有时需要使用
torchvision.utils.make_grid将多张图片拼成一张图片后,用writer.add_image显示
- 对于单张图片的显示使用
-
连续变量可视化:使用
add_scalar方法,对连续变量(或时序变量)的变化过程进行可视化展示
for i in range(500):
x = i
y = x ** 2
writer.add_scalar("x", x, i) #日志中记录x在第step i 的值
writer.add_scalar("y", y, i) #日志中记录y在第step i 的值
writer.close()
Copy to clipboardErrorCopied
- 参数分布可视化:使用
add_histogram方法,对参数(或变量)的分布进行可视化展示
import numpy as np
# 创建正态分布的张量模拟参数矩阵
def norm(mean, std):
t = std * torch.randn((100, 20)) + mean
return t
for step, mean in enumerate(range(-10, 10, 1)):
w = norm(mean, 1)
writer.add_histogram("w", w, step)
writer.flush()
writer.close()
Copy to clipboardErrorCopied
4 总结
本次任务,主要介绍了PyTorch可视化,包括可视化网络结构、CNN卷积层可视化和使用TensorBoard可视化训练过程。
- 使用
torchinfo库,可视化模型网络结构,展示模块信息(每一层的类型、输出shape和参数量)、模型整体的参数量、模型大小、一次前向或者反向传播需要的内存大小等。 - 使用
grad-cam库,可视化重要像素点,能够快速确定重要区域,进行可解释性分析或模型优化改进。 - 通过
TensorBoard工具,调用相关方法创建训练记录,可视化模型结构、图像、连续变量和参数分布等。
PyTorch学习笔记(八):PyTorch生态简介
一、 torchvision(图像)
1.torchvision.datasets:
计算机视觉领域常见的数据集,包括CIFAR、EMNIST、Fashion-MNIST等
torchvision.datasets主要包含了一些我们在计算机视觉中常见的数据集,在0.10.0版本的torchvision下,有以下的数据集:
| Caltech | CelebA | CIFAR | Cityscapes |
|---|---|---|---|
| EMNIST | FakeData | Fashion-MNIST | Flickr |
| ImageNet | Kinetics-400 | KITTI | KMNIST |
| PhotoTour | Places365 | QMNIST | SBD |
| SEMEION | STL10 | SVHN | UCF101 |
| VOC | WIDERFace |
2.torchvision.transforms:
数据预处理方法,可以进行图片数据的放大、缩小、水平或垂直翻转等
from torchvision import transforms
data_transform = transforms.Compose([
transforms.ToPILImage(), # 这一步取决于后续的数据读取方式,如果使用内置数据集则不需要
transforms.Resize(image_size),
transforms.ToTensor()
])
3.torchvision.models:
预训练模型,包括图像分类、语义分割、物体检测、实例分割、人体关键点检测、视频分类等模型
为了提高训练效率,减少不必要的重复劳动,PyTorch官方也提供了一些预训练好的模型供我们使用,可以点击这里进行查看现在有哪些预训练模型,下面我们将对如何使用这些模型进行详细介绍。 此处我们以torchvision0.10.0 为例,如果希望获取更多的预训练模型,可以使用使用pretrained-models.pytorch仓库。现有预训练好的模型可以分为以下几类:
- Classification
在图像分类里面,PyTorch官方提供了以下模型,并正在不断增多。
| AlexNet | VGG | ResNet | SqueezeNet |
|---|---|---|---|
| DenseNet | Inception v3 | GoogLeNet | ShuffleNet v2 |
| MobileNetV2 | MobileNetV3 | ResNext | Wide ResNet |
| MNASNet | EfficientNet | RegNet | 持续更新 |
这些模型是在ImageNet-1k进行预训练好的,具体的使用我们会在后面进行介绍。除此之外,我们也可以点击这里去查看这些模型在ImageNet-1k的准确率。
- Semantic Segmentation
语义分割的预训练模型是在COCO train2017的子集上进行训练的,提供了20个类别,包括background, aeroplane, bicycle, bird, boat, bottle, bus, car, cat, chair, cow, diningtable, dog, horse, motorbike, person, pottedplant, sheep, sofa,train, tvmonitor。
| FCN ResNet50 | FCN ResNet101 | DeepLabV3 ResNet50 | DeepLabV3 ResNet101 |
|---|---|---|---|
| LR-ASPP MobileNetV3-Large | DeepLabV3 MobileNetV3-Large | 未完待续 |
具体我们可以点击这里进行查看预训练的模型的mean IOU和global pixelwise acc
- Object Detection,instance Segmentation and Keypoint Detection
物体检测,实例分割和人体关键点检测的模型我们同样是在COCO train2017进行训练的,在下方我们提供了实例分割的类别和人体关键点检测类别:
COCO_INSTANCE_CATEGORY_NAMES = [
‘background’, ‘person’, ‘bicycle’, ‘car’, ‘motorcycle’, ‘airplane’, ‘bus’,‘train’, ‘truck’, ‘boat’, ‘traffic light’, ‘fire hydrant’, ‘N/A’, ‘stop sign’, ‘parking meter’, ‘bench’, ‘bird’, ‘cat’, ‘dog’, ‘horse’, ‘sheep’, ‘cow’, ‘elephant’, ‘bear’, ‘zebra’, ‘giraffe’, ‘N/A’, ‘backpack’, ‘umbrella’, ‘N/A’, ‘N/A’,‘handbag’, ‘tie’, ‘suitcase’, ‘frisbee’, ‘skis’, ‘snowboard’, ‘sports ball’,‘kite’, ‘baseball bat’, ‘baseball glove’, ‘skateboard’, ‘surfboard’, ‘tennis racket’,‘bottle’, ‘N/A’, ‘wine glass’, ‘cup’, ‘fork’, ‘knife’, ‘spoon’, ‘bowl’,‘banana’, ‘apple’, ‘sandwich’, ‘orange’, ‘broccoli’, ‘carrot’, ‘hot dog’, ‘pizza’,‘donut’, ‘cake’, ‘chair’, ‘couch’, ‘potted plant’, ‘bed’, ‘N/A’, ‘dining table’,‘N/A’, ‘N/A’, ‘toilet’, ‘N/A’, ‘tv’, ‘laptop’, ‘mouse’, ‘remote’, ‘keyboard’, ‘cell phone’,‘microwave’, ‘oven’, ‘toaster’, ‘sink’, ‘refrigerator’, ‘N/A’, ‘book’,‘clock’, ‘vase’, ‘scissors’, ‘teddy bear’, ‘hair drier’, ‘toothbrush’]
COCO_PERSON_KEYPOINT_NAMES =[‘nose’,‘left_eye’,‘right_eye’,‘left_ear’,‘right_ear’,‘left_shoulder’,‘right_shoulder’,‘left_elbow’,‘right_elbow’,‘left_wrist’,‘right_wrist’,‘left_hip’,‘right_hip’,‘left_knee’,‘right_knee’,‘left_ankle’,‘right_ankle’]
| Faster R-CNN | Mask R-CNN | RetinaNet | SSDlite |
|---|---|---|---|
| SSD | 未完待续 |
同样的,我们可以点击这里查看这些模型在COCO train 2017上的box AP,keypoint AP,mask AP
- Video classification
视频分类模型是在 Kinetics-400上进行预训练的
| ResNet 3D 18 | ResNet MC 18 | ResNet (2+1) D |
|---|---|---|
| 未完待续 |
同样我们也可以点击这里查看这些模型的。
4.torchvision.io:
视频、图片和文件的IO操作,包括读取、写入、编解码处理等
5.torchvision.ops:
计算机视觉的特定操作,包括但不仅限于NMS,RoIAlign(MASK R-CNN中应用的一种方法),RoIPool(Fast R-CNN中用到的一种方法)
6.torchvision.utils:
图片拼接、可视化检测和分割等操作
torchvision.utils 为我们提供了一些可视化的方法,可以帮助我们将若干张图片拼接在一起、可视化检测和分割的效果。具体方法可以点击这里进行查看。
总的来说,torchvision的出现帮助我们解决了常见的计算机视觉中一些重复且耗时的工作,并在数据集的获取、数据增强、模型预训练等方面大大降低了我们的工作难度,可以让我们更加快速上手一些计算机视觉任务。
2 PyTorchVideo(视频)
-
简介:PyTorchVideo是一个专注于视频理解工作的深度学习库,提供加速视频理解研究所需的可重用、模块化和高效的组件,使用PyTorch开发,支持不同的深度学习视频组件,如视频模型、视频数据集和视频特定转换。
-
特点:基于PyTorch,提供Model Zoo,支持数据预处理和常见数据,采用模块化设计,支持多模态,优化移动端部署
-
使用方式:TochHub、PySlowFast、PyTorch Lightning
3 torchtext(文本)
torchtext的主要组成部分
torchtext可以方便的对文本进行预处理,例如截断补长、构建词表等。torchtext主要包含了以下的主要组成部分:
- 数据处理工具 torchtext.data.functional、torchtext.data.utils
- 数据集 torchtext.data.datasets
- 词表工具 torchtext.vocab
- 评测指标 torchtext.metrics
-
简介:torchtext是PyTorch的自然语言处理(NLP)的工具包,可对文本进行预处理,例如截断补长、构建词表等操作
-
构建数据集:使用
Field类定义不同类型的数据 -
评测指标:使用
torchtext.data.metrics下的方法,对NLP任务进行评测
本节参考
- torchtext官方文档
- atnlp/torchtext-summary
transforms实战
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as plt
%matplotlib inline
# 加载原始图片
img = Image.open("./lenna.jpg")
print(img.size)
plt.imshow(img)
## transforms.CenterCrop(size)
# 对给定图片进行沿中心切割
# 对图片沿中心放大切割,超出图片大小的部分填0
img_centercrop1 = transforms.CenterCrop((500,500))(img)
print(img_centercrop1.size)
# 对图片沿中心缩小切割,超出期望大小的部分剔除
img_centercrop2 = transforms.CenterCrop((224,224))(img)
print(img_centercrop2.size)
plt.subplot(1,3,1),plt.imshow(img),plt.title("Original")
plt.subplot(1,3,2),plt.imshow(img_centercrop1),plt.title("500 * 500")
plt.subplot(1,3,3),plt.imshow(img_centercrop2),plt.title("224 * 224")
plt.show()
## transforms.ColorJitter(brightness=0, contrast=0, saturation=0, hue=0)
# 对图片的亮度,对比度,饱和度,色调进行改变
img_CJ = transforms.ColorJitter(brightness=1,contrast=0.5,saturation=0.5,hue=0.5)(img)
print(img_CJ.size)
plt.imshow(img_CJ)
## transforms.Grayscale(num_output_channels)
img_grey_c3 = transforms.Grayscale(num_output_channels=3)(img)
img_grey_c1 = transforms.Grayscale(num_output_channels=1)(img)
plt.subplot(1,2,1),plt.imshow(img_grey_c3),plt.title("channels=3")
plt.subplot(1,2,2),plt.imshow(img_grey_c1),plt.title("channels=1")
plt.show()
## transforms.Resize
# 等比缩放
img_resize = transforms.Resize(224)(img)
print(img_resize.size)
plt.imshow(img_resize)
## transforms.Scale
# 等比缩放 不推荐使用此转换以支持调整大小
img_scale = transforms.Scale(224)(img)
print(img_scale.size)
plt.imshow(img_scale)
## transforms.RandomCrop
# 随机裁剪成指定大小
# 设立随机种子
import torch
torch.manual_seed(31)
# 随机裁剪
img_randowm_crop1 = transforms.RandomCrop(224)(img)
img_randowm_crop2 = transforms.RandomCrop(224)(img)
print(img_randowm_crop1.size)
plt.subplot(1,2,1),plt.imshow(img_randowm_crop1)
plt.subplot(1,2,2),plt.imshow(img_randowm_crop2)
plt.show()
## transforms.RandomHorizontalFlip
# 随机左右旋转
# 设立随机种子,可能不旋转
import torch
torch.manual_seed(31)
img_random_H = transforms.RandomHorizontalFlip()(img)
print(img_random_H.size)
plt.imshow(img_random_H)
## transforms.RandomVerticalFlip
# 随机垂直方向旋转
img_random_V = transforms.RandomVerticalFlip()(img)
print(img_random_V.size)
plt.imshow(img_random_V)
## transforms.RandomResizedCrop
# 随机裁剪成指定大小
img_random_resizecrop = transforms.RandomResizedCrop(224,scale=(0.5,0.5))(img)
print(img_random_resizecrop.size)
plt.imshow(img_random_resizecrop)
## 对图片进行组合变化 tranforms.Compose()
# 对一张图片的操作可能是多种的,我们使用transforms.Compose()将他们组装起来
transformer = transforms.Compose([
transforms.Resize(256),
transforms.transforms.RandomResizedCrop((224), scale = (0.5,1.0)),
transforms.RandomVerticalFlip(),
])
img_transform = transformer(img)
plt.imshow(img_transform)