PID控制的概念
生活中的一些小电器,比如恒温热水器、平衡车,无人机的飞行姿态和飞行速度控制,自动驾驶等等,都有应用到 PID——PID 控制在自动控制原理中是一套比较经典的算法。
为什么需要 PID 控制器呢?
你一定用过恒温热水壶,想让热水壶的水保持在一个恒定的温度,这时候就需要一种算法先将水温加热到目标位置附近,能够“预见”这个水温的变化趋势自动控制加热功率,然后还能根据各种环境影响因素去调节以维持设定目标。
PID算法:就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种常见的“保持稳定”控制算法。
常见的PID控制系统框图:
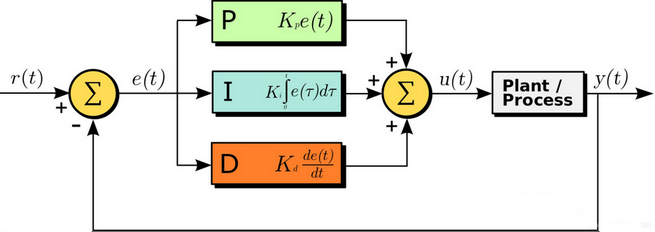
框图可以看出e(t)和u(t)的关系式:

其中:
Kp:比例增益;
Ki:积分增益;
Kd:微分增益;
e:误差=设定值 - 回授值;
t:时间。
简单讲,根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
公式
PID原始公式:

把Kp乘进去得:

令

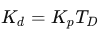
即可得到简化公式:

对于这个式子,其实涵盖了三种控制算法,每一种都可以单独拿出来。
PID算法其实就是三个算法的组合,而且,在数学上面就是简单的代数和!
原理
1.比例控制算法
我们先说PID中最简单的比例控制,抛开其他两个不谈。假设我有一个水缸,最终的控制目的是要保证水缸里的水位永远的维持在1米的高度。假设初始时刻,水缸里的水位是0.2米,那么当前时刻的水位和目标水位之间是存在一个误差的error,且error为0.8。假设一个人通过往缸里加水的方式来控制水位。如果单纯的用比例控制算法,就是指加入的水量u和误差error是成正比的。即
u=kp*error
假设kp取0.5,
那么t=1时(表示第1次加水),u=0.5*0.8=0.4,所以这一次加入的水量会使水位在0.2的基础上上升0.4,达到0.6。
接着,t=2时刻(第2次加水),当前水位是0.6,所以error是0.4。u=0.5*0.4=0.2,会使水位再次上升0.2,达到0.8。
如此这么循环下去,就是比例控制算法的运行方法。
可以预见,最终水位会无限接近我们需要的1米。
但是,单单的比例控制存在着一些不足,其中一点就是:稳态误差。
像上述的例子,根据kp取值不同,系统最后都会达到1米,只不过kp大了到达的快,kp小了到达的慢一些。不会有稳态误差。但是,考虑另外一种情况,假设这个水缸在加水的过程中,存在漏水的情况,假设每次加水的过程,都会漏掉0.1米高度的水。仍然假设kp取0.5,那么会存在着某种情况,假设经过几次加水,水缸中的水位到0.8时,水位将不会再变换!!!因为,水位为0.8,则误差error=0.2。所以每次往水缸中加水的量为u=0.5*0.2=0.1。同时,每次加水,缸里又会流出去0.1米的水!!!加入的水和流出的水相抵消,水位将不再变化!!
也就是说,我的目标是1米,但是最后系统达到0.8米的水位就不再变化了,且系统已经达到稳定。由此产生的误差就是稳态误差了。
(在实际情况中,这种类似水缸漏水的情况往往更加常见,比如控制汽车运动,摩擦阻力就相当于是“漏水”,控制机械臂、无人机的飞行,各类阻力和消耗都可以理解为本例中的“漏水”)
所以,单独的比例控制,在很多时候并不能满足要求。
2.积分控制算法
接着说上面的例子,如果仅仅用比例,可以发现存在暂态误差,最后的水位就卡在0.8了。于是,在控制中,我们再引入一个分量,该分量和误差的积分是正比关系。所以,比例+积分控制算法为:
u=kp*error+ ki∗∫ error
还是用上面的例子来说明,第一次的误差error是0.8,第二次的误差是0.4,第三次的误差是0.2,至此,误差的积分(离散情况下积分其实就是做累加),∫error=0.8+0.4+0.2=1.4。先假设它积分系数为0.1,已知比例控制算法的输入和漏掉的相等,那么这时整个算法只需要看积分控制算法的输出就行了,故积分控制输出1.4*0.1=0.14,很显然,积分控制的加入打破了之前的稳定状态,之前会卡在0.8,现在至少会是0.8+0.14。(计算很随意,不要较真)这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数ki乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差(假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的0.8,由于加入了积分项的存在,会让输入增大,从而使得水缸的水位可以大于0.8,渐渐到达目标的1.0。)这就是积分项的作用。另一方面积分项也加快了整体控制算法的响应速度。
(稳态误差又叫静差:被控量的稳定值和给定值之差,一般用于衡量系统的准确性)静差很难被消除,但是通过积分控制可以尽量去减小,而且积分系数不可太大,太大静差反而更大。
3.微分控制算法
换一个另外的例子,平稳的驾驶车辆,当发现前面有红灯时,为了使得行车平稳,基本上提前几十米就放松油门并踩刹车了。当车辆离停车线非常近的时候,则使劲踩刹车,使车辆停下来。整个过程可以看做一个加入微分的控制策略。
微分,说白了在离散情况下,就是error的差值,就是t时刻和t-1时刻error的差,即u=kd *(error(t)-error(t-1)),其中的kd是一个系数项。可以看到,在刹车过程中,因为error是越来越小的,所以这个微分控制项一定是负数,在控制中加入一个负数项,他存在的作用就是为了防止汽车由于刹车不及时而闯过了线。从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用,就可以理解为刹车,当车离停车线很近并且车速还很快时,这个微分项的绝对值(实际上是一个负数)就会很大,从而表示应该用力踩刹车才能让车停下来。
换到上面给水缸加水的例子,就是当发现水缸里的水快要接近1的时候,加入微分项,可以防止给水缸里的水加到超过1米的高度,说白了就是减少控制过程中的震荡。
从公式上看,微分控制算法如下:

离散情况下,微分就是error的差值,就是当前时刻和上一时刻error的差,error指的是目标值和当前值的差值

①当 当前值<目标值 时:一般在该调节过程中,误差是越来越小的(正实数运算),这也就可以得

对于主要的比例控制而言,此时e(t)>0,二者符号相反,换言之,这里微分控制起到了削减比例控制力度的作用

②当 当前值>目标值 时: 输出过大,需要减小,对于比例控制,e(t)<0,反观微分控制:
符号还是和比例控制相反

最终结论就是微分起到阻尼作用,减小震荡,提高稳定,减小变化趋势,但是也会降低响应速度。
通过下面的动图再直观看一下PID三个控制参数的影响:

从上面的动图可以看出:
1、Kp越大,越能快速接近目标值1.0
2、只调整Kp可能会存在稳定误差
3、加入Ki可以减小稳定误差,但同时也使得系统震荡加剧
4、加入Ki加快了整体的响应速度
5、加入Kd可以减小震荡,但也降低了响应速度(可以通过观察图像什么时间t首次碰到目标1.0)
参考及扩展推荐:
https://blog.csdn.net/m0_38106923/article/details/109545445
https://zhuanlan.zhihu.com/p/32264695
https://www.zhihu.com/question/402289932
https://zhuanlan.zhihu.com/p/39573490
https://blog.csdn.net/kevinshift/article/details/124753170
https://www.woshipm.com/pd/4206858.html