来源:投稿 作者:蓬蓬奇
编辑:学姐
BiSeNet v1说明:
文章链接:https://arxiv.org/abs/1808.00897
官方开源代码:https://github.com/CoinCheung/BiSeNet (本文未使用)
文章标题:BiSeNet: Bilateral Segmentation Network for Real-time Semantic Segmentation
标题翻译:BiSeNet: 用于实时语义分割的双边分割网络
作者:ChangqianYu, JingboWang, ChaoPeng, Changxin Gao, GangYu, NongSan
单位:旷视科技
发表会议及时间:ECCV-2018
数据集:Cityscapes、CamVid、和COCO-Stuff
原论文的实验部分,在各种数据集上做对比,还做了很多消融实验,论文班的老师说,一篇好的论文应该做大量实验,投稿命中可能性更高,而这篇文章实验部分写的很好,想投论文的同学可以参考一下。
本文是论文班优秀学员的学习笔记~认真阅读很有帮助!
目录:
-
1 论文模型概述
1.1 引言
1.2 模型详解 -
2 代码详解(pytorch)
2.1 导入包
2.2 卷积模块
2.3 空间分支模块
2.4 ARM模块
2.5 FFM模块
2.6 上下文分支模块
2.7 BiSeNet模型
2.8 if 「name」 == '「main」
1、论文模型概述
1.1 引言
实时语义分割应用场景:可以广泛应用于增强现实设备(augmented reality devices)、自动驾驶(autonomous driving)和视频监控领域(video surveillance) 。这些应用对快速交互或响应的高效推理速度有很高的要求。
实时语义分割的算法[1, 17, 25, 39]表明,主要有三种方法来加速该模型:
-
[34, 39]尝试通过裁剪或调整输入大小以降低计算复杂度。虽然该方法简单有效,但是空间细节的丢失破坏了预测,尤其是在边界周围,导致指标和可视化的准确性下降。(不提倡,效果很差)
-
有些算法不是调整输入图像的大小,而是进行通道剪枝来提高推理速度[1, 8, 25],尤其是在骨干模型的早期阶段。然而,它会丢失空间信息。(推荐试一试)
-
对于最后一种情况,ENet[25]提出丢弃模型的最后一个阶段,以追求一个极其紧凑的框架。该方法的缺点也很明显:由于ENet抛弃了最后阶段的下采样,模型的感受野不足以涵盖大物体,导致判别能力较差。
总的来说,上述所有方法都在用精度换速度,这在实践中是不利的。下图1(a)给出了说明。
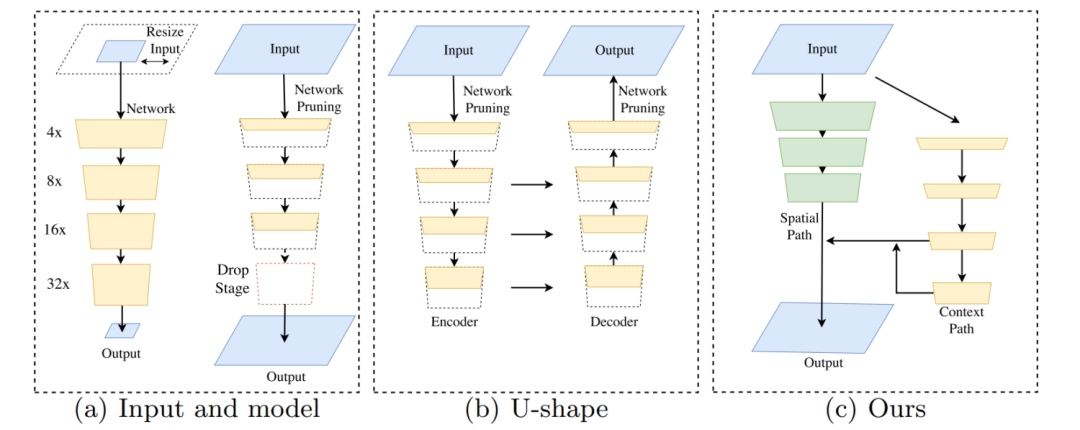
图1:语义分割加速的方法和本文提出的方法。
(a)左图表示对输入图像裁剪或调整大小,右图表示通过通道剪枝或丢弃模块得到的轻量化模型。
(b)表示U-shape结构。
(c)展示了本文中提出的双边分割网络(BiSeNet)。 黑色虚线表示破坏空间信息,而红色虚线表示减小感受野。绿色块是本文中提出的空间路径(SP)。
在网络部分,每个块代表不同下采样大小的特征图,并且块的长度代表空间分辨率,而厚度代表通道的数量。
为了弥补上述提到的空间细节的损失,研究人员广泛使用U-shape结构[1, 25, 35]。U-shape结构逐渐增加了空间分辨率(通过上采样),通过融合主干网络(backbone)的层次特征(hierarchical features),填充了一些缺失的细节。然而,这种技术有两个缺点:
-
完整的U-shape结构在高分辨率特征图上引入额外的计算,会降低模型速度。
-
更重要的是,通过裁减尺寸和剪枝丢失掉的空间信息无法简单的通过引入浅层信息修复,如图1(b)所示,因此性价比不高。换句话说,U-shape结构最好被视为一种缓解(relief),而不是一种基本的解决方案(essential solution)。
基于以上观察,我们提出的双边分割网络(Bilateral Segmentation Network,BiSeNet) 由两部分组成:空间路径(Spatial Path,SP)和上下文路径(Context Path,CP)。顾名思义,这两个组件被设计分别应对空间信息的丢失和感受野的减小。图1(c)显示了这两个组件的结构。
为了在不损失速度的情况下获得更好的准确率,我们还研究了两条路径的融合和最终预测的细化,分别提出了特征融合模块(Feature Fusion Module, FFM)和注意力细化模块(Attention Refinement Module, ARM)。
我们的主要贡献总结如下:
-
提出了一种新的方法,将保留空间信息和提供感受野的功能分离为两条路径。具体地说,我们提出了一个具有空间路径(SP)和上下文路径(CP)的双边分割网络。
-
设计了两个特定的模块,特征融合模块(FFM)和注意力细化模块(ARM),在可接受的成本下进一步提高准确率。
-
在Cityscapes、CamVid和COCO-Stuff的基准测试中取得了令人印象深刻的成绩。更具体地说,我们在速度为105 FPS的Cityscapes测试集上获得了68.4%的结果。
1.2 模型详解
算法主要包含三部分:空间分支、上下文分支和特征融合模块。
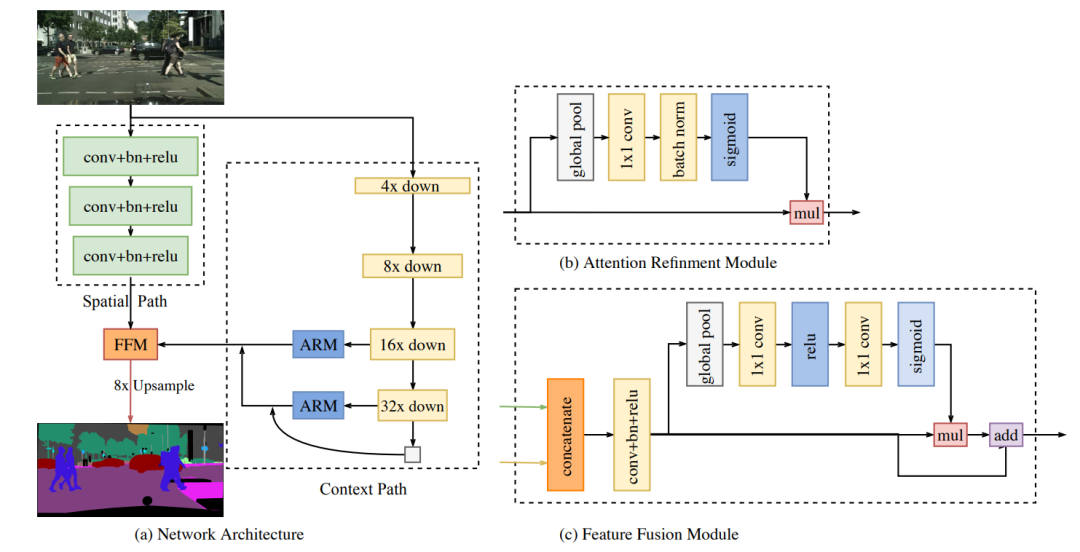
图2。双边分割网络综述。
(a)网络架构。块的长度表示空间(分辨率)大小,厚度表示通道的数量。
(b)注意力细化模块(ARM)的组件。
(c)特征融合模块(FFM)的组成部分。
-
空间分支(Spatial Path,SP):在语义分割的任务中,一些现有的方法[5, 6, 32, 40]试图用空洞卷积在保持输入图像的分辨率基础上编码足够的空间信息,而少数方法[5, 6, 26, 40]试图用金字塔池化模块、ASPP或“大卷积核”来捕获足够大的感受野。这些方法表明,空间信息和感受野是实现高精度的关键。然而,很难同时满足这两个需求,特别是在实时语义分割的情况下。
基于这一观察,我们提出了一种空间路径来保持原始输入图像的空间大小并编码丰富的空间信息。 空间路径包含三层,每一层都包含一个stride=2的3×3卷积,后跟批量归一化BN[15]和ReLU[11]。因此,该路径提取的输出特征图是原始图像的1/8。这种空间尺寸较大的特征图编码了丰富的空间信息。图2(a)显示了该结构的细节。 -
上下文分支(Context Path,CP):在语义分割任务中,感受野对于性能具有重要意义。为了扩大感受野,一些方法利用了金字塔池化模块[40],ASPP[5, 6]或“大卷积核”[26]。然而,这些操作计算量大,内存消耗大,导致速度慢。
为了兼顾感受野的大小和实时性两个因素,上下文分支采用轻量级模型和全局平均池化[5, 6, 21]去提供更大的感受野。轻量级模型可以快速的下采样从而获得更大的感受野,来编码高级特征的上下文信息;然后,使用全局平均池化提供具有全局上下文信息的最大感受野;最后,结合全局池化上采样输出的特征图和轻量级模型的特征图。
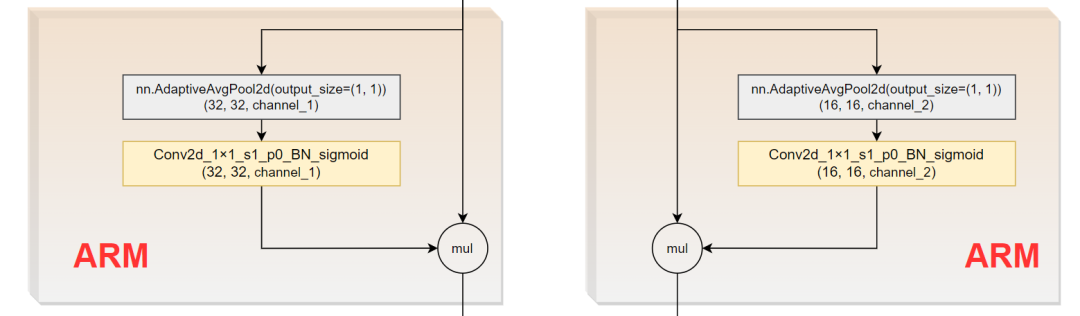
注意力细化模块(Attention refinement module,ARM):在上下文路径中,我们提出了特定的注意力细化模块(ARM)来细化每个阶段的特征,ARM使用全局平均池化去捕捉全局上下文并且计算一个注意力向量去引导特征学习,这个设计可以使特征图更加精细,如图2(b)所示。 -
特征融合模块(Feature Fusion Module,FFM):两个分支所提取的特征是不同level的,所以不能简单的把二者相加。空间分支捕捉空间信息编码更丰富的细节信息,上下文分支主要编码了上下文信息。换句话说,空间分支的特征是低级特征的,而上下文分支的特征是高级特征的,因此,本文提出了专门的特征融合模块。
给定不同level的特征,我们首先在通道维度concate空间路径和上下文路径的输出特征。然后经过BN层[15]进行归一化来平衡特征的尺度。接下来,将特征池化为一个特征向量,并计算一个权重向量,类似于SENet [13]。该权重向量可以对特征重新加权,这相当于特征选择和组合。图2(c)显示了这种设计的细节。
损失函数:在本文中,我们还利用辅助损失(auxiliary loss)函数来监督我们提出的方法的训练。我们使用主损失函数来监控整个网络BiseNet的输出。此外,我们添加了两个特定的辅助损失函数来监督上下文路径的输出,就像深度监督[35]一样。所有损失函数都是Softmax损失,如公式1所示。此外,我们使用参数来平衡主要损失和辅助损失的权重,如公式2所示。本文中
其中是网络的输出预测。
其中是级联输出(concatenated output)的主要损失。
是上下文分支模型第
的输出特征。
是
的辅助损失。在本文中,
。
是联合损失函数。在这里,我们只在训练阶段使用辅助损失。
2 代码详解
代码链接:https://github.com/ooooverflow/BiSeNet(这里CP部分没有使用原文Xception39,而是ResNet18-101)
下述以resnet18为例进行调试。
https://mmbiz.qpic.cn/mmbiz_svg/tqRiaNianNl1lf9WtUzq0kROStQymk9FF84EeWjWzibbBV33vqg9Ju3fTqq85VYqGNDsx0XAkIDMstA2ZmERWZ5B3Pde0oRFcuE/640?wx_fmt=svg&wxfrom=5&wx_lazy=1&wx_co=1
-
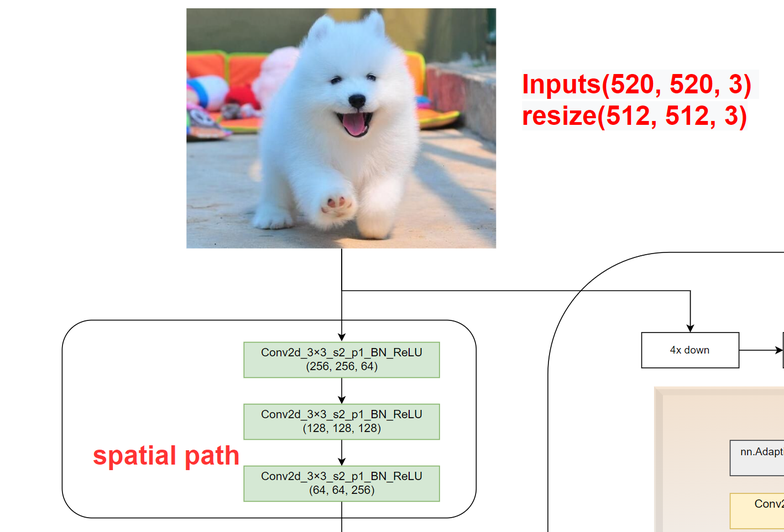
本图中将通道数放在了最后,即(H, W, C),代码调试时为(B, C, H, W)。
-
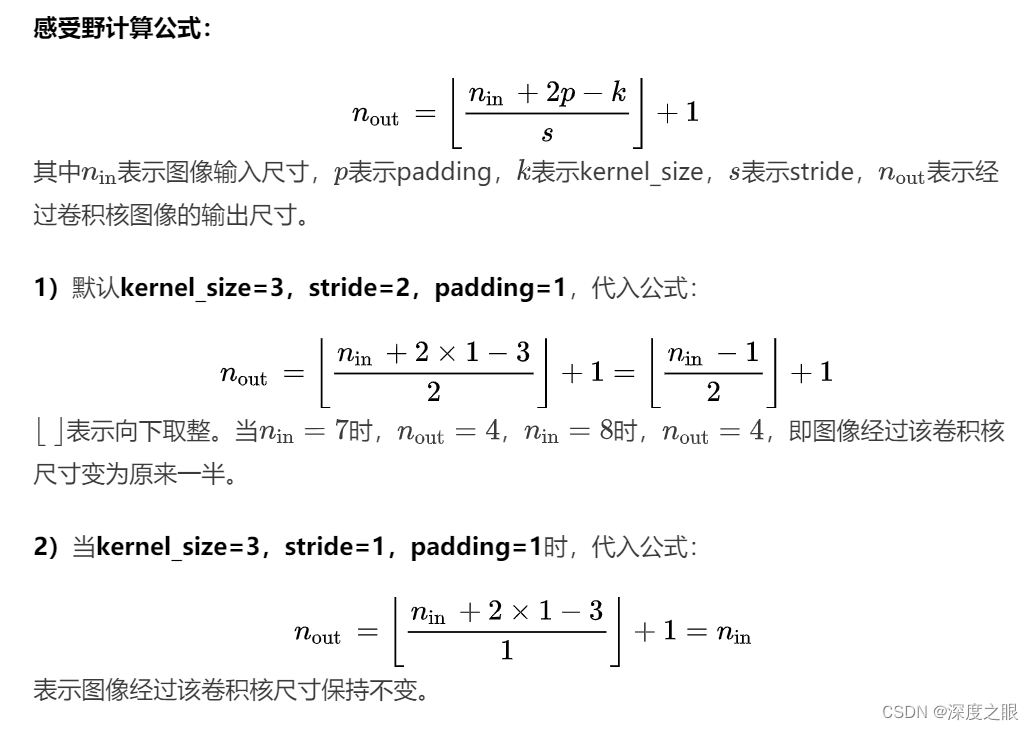
Conv2d_3×3_s2_p1_BN_ReLU (256, 256, 64)含义:卷积核kernel_size=3×3,stride=2,padding=1,后接BN层和ReLU激活函数。经过该卷积核后图像尺寸为(256, 256, 64)。
2.1 导入包
import torch
from torch import nn
from torchvision import models
import warnings
warnings.filterwarnings(action='ignore')
2.2 卷积模块
将Conv2d+BN+ReLU层封装为一个类,便于后续调用。
class ConvBlock(torch.nn.Module):
def __init__(self, in_channels, out_channels,
kernel_size=3, stride=2, padding=1):
super().__init__()
self.conv1 = nn.Conv2d(in_channels,
out_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding,
bias=False)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU()
def forward(self, input):
x = self.conv1(input)
return self.relu(self.bn(x))
2.3 空间分支模块
class Spatial_path(torch.nn.Module):
def __init__(self):
super().__init__()
self.convblock1 = ConvBlock(in_channels=3, out_channels=64)
self.convblock2 = ConvBlock(in_channels=64, out_channels=128)
self.convblock3 = ConvBlock(in_channels=128, out_channels=256)
def forward(self, input):
x = self.convblock1(input)
x = self.convblock2(x)
x = self.convblock3(x)
return x
可以看出空间分支就是三层卷积,调用上述ConvBlock类,只传入输入输出通道,图像尺寸每经过一层卷积变为原来一半,最后变为原来的1/8。通道数由3->64->128->256。
2.4 ARM模块
class AttentionRefinementModule(torch.nn.Module):
def __init__(self, in_channels, out_channels):
super().__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
self.bn = nn.BatchNorm2d(out_channels)
self.sigmoid = nn.Sigmoid()
self.in_channels = in_channels
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
def forward(self, input): # input.shape=(16, 256, 32, 32)
# global average pooling
x = self.avgpool(input) # x.shape=(16, 256, 1, 1)
assert self.in_channels == x.size(1), 'in_channels and out_channels should all be {}'.format(x.size(1))
x = self.conv(x) # x.shape=(16, 256, 1, 1)
# x = self.sigmoid(self.bn(x))
x = self.sigmoid(x) # x.shape=(16, 256, 1, 1)
# channels of input and x should be same
x = torch.mul(input, x) # x.shape=(16, 256, 32, 32)
return x
这里使用的是Conv2d+bn+sigmoid。可以看出,初始化类只需要传入输入通道和输出通道两个参数即可,二者一般数值相同。resnet18和resnet101差了四倍,具体见class BiSeNet(torch.nn.Module)模块:
if context_path == 'resnet101':
self.attention_refinement_module1 = AttentionRefinementModule(1024, 1024)
self.attention_refinement_module2 = AttentionRefinementModule(2048, 2048)
elif context_path == 'resnet18':
# build attention refinement module for resnet 18
self.attention_refinement_module1 = AttentionRefinementModule(256, 256)
self.attention_refinement_module2 = AttentionRefinementModule(512, 512)
2.5 FFM模块

class FeatureFusionModule(torch.nn.Module):
def __init__(self, num_classes, in_channels):
super().__init__()
# self.in_channels = input_1.channels + input_2.channels
# resnet101 3328 = 256(from context path) + 1024(from spatial path) + 2048(from spatial path)
# resnet18 1024 = 256(from context path) + 256(from spatial path) + 512(from spatial path)
self.in_channels = in_channels
self.convblock = ConvBlock(in_channels=self.in_channels, out_channels=num_classes, stride=1)
self.conv1 = nn.Conv2d(num_classes, num_classes, kernel_size=1)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(num_classes, num_classes, kernel_size=1)
self.sigmoid = nn.Sigmoid()
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
def forward(self, input_1, input_2): # input_1.shape=(16, 256, 64, 64) input_2.shape=(16, 768, 64, 64)
x = torch.cat((input_1, input_2), dim=1) # x.shape=(16, 1024, 64, 64)
assert self.in_channels == x.size(1), 'in_channels of ConvBlock should be {}'.format(x.size(1))
feature = self.convblock(x) # feature.shape=(16, 10, 64, 64)
x = self.avgpool(feature) # x.shape=(16, 10, 1, 1)
x = self.relu(self.conv1(x)) # x.shape=(16, 10, 1, 1)
x = self.sigmoid(self.conv2(x)) # x.shape=(16, 10, 1, 1)
x = torch.mul(feature, x) # x.shape=(16, 10, 64, 64)
x = torch.add(x, feature) # x.shape=(16, 10, 64, 64)
return x
初始化类只需要传入类别数和输入通道数两个参数即可。resnet18和resnet101不一样,具体见class BiSeNet(torch.nn.Module)模块:
if context_path == 'resnet101':
self.attention_refinement_module1 = AttentionRefinementModule(1024, 1024)
self.attention_refinement_module2 = AttentionRefinementModule(2048, 2048)
...
# build feature fusion module, 1024+2048+256=3328, 256为上下文分支通道数
self.feature_fusion_module = FeatureFusionModule(num_classes, 3328)
elif context_path == 'resnet18':
# build attention refinement module for resnet 18
self.attention_refinement_module1 = AttentionRefinementModule(256, 256)
self.attention_refinement_module2 = AttentionRefinementModule(512, 512)
....
# build feature fusion module, 256+512+256=1024, 256为上下文分支通道数
self.feature_fusion_module = FeatureFusionModule(num_classes, 1024)
2.6 上下文分支模块

这里可以选择使用resnet18还是resnet101,调用torchvision中models库模型。可加载预训练权重。可以看出resnet18和resnet101区别在于layer1-4层通道数扩大了四倍。
class resnet18(torch.nn.Module):
def __init__(self, path_model=None):
super().__init__()
resnet18_model = models.resnet18()
if path_model:
resnet18_model.load_state_dict(torch.load(path_model, map_location="cpu"))
print("load pretrained model , done!! ")
self.features = resnet18_model
self.conv1 = self.features.conv1
self.bn1 = self.features.bn1
self.relu = self.features.relu
self.maxpool1 = self.features.maxpool
self.layer1 = self.features.layer1
self.layer2 = self.features.layer2
self.layer3 = self.features.layer3
self.layer4 = self.features.layer4
def forward(self, input): # input.shape=(16, 3, 512, 512)
x = self.conv1(input) # x.shape=(16, 64, 256, 256)
x = self.relu(self.bn1(x)) # x.shape=(16, 64, 256, 256)
x = self.maxpool1(x) # x.shape=(16, 64, 128, 128)
feature1 = self.layer1(x) # 1 / 4 # feature1.shape=(16, 64, 128, 128)
feature2 = self.layer2(feature1) # 1 / 8 # feature2.shape=(16, 128, 64, 64)
feature3 = self.layer3(feature2) # 1 / 16 # feature3.shape=(16, 256, 32, 32)
feature4 = self.layer4(feature3) # 1 / 32 # feature4.shape=(16, 512, 16, 16)
# global average pooling to build tail
tail = torch.mean(feature4, 3, keepdim=True) # tail.shape=(16, 512, 16, 1)
tail = torch.mean(tail, 2, keepdim=True) # tail.shape=(16, 512, 1, 1)
return feature3, feature4, tail
class resnet101(torch.nn.Module):
def __init__(self, path_model=None):
super().__init__()
resnet101_model = models.resnet101()
if path_model:
resnet101_model.load_state_dict(torch.load(path_model, map_location="cpu"))
self.features = resnet101_model
self.conv1 = self.features.conv1
self.bn1 = self.features.bn1
self.relu = self.features.relu
self.maxpool1 = self.features.maxpool
self.layer1 = self.features.layer1
self.layer2 = self.features.layer2
self.layer3 = self.features.layer3
self.layer4 = self.features.layer4
def forward(self, input): # input.shape=(16, 3, 512, 512)
x = self.conv1(input) # x.shape=(16, 64, 256, 256)
x = self.relu(self.bn1(x)) # x.shape=(16, 64, 256, 256)
x = self.maxpool1(x) # x.shape=(16, 64, 128, 128)
feature1 = self.layer1(x) # 1 / 4 # feature1.shape=(16, 256, 128, 128)
feature2 = self.layer2(feature1) # 1 / 8 # feature2.shape=(16, 512, 64, 64)
feature3 = self.layer3(feature2) # 1 / 16 # feature3.shape=(16, 1024, 32, 32)
feature4 = self.layer4(feature3) # 1 / 32 # feature4.shape=(16, 2048, 16, 16)
# global average pooling to build tail
tail = torch.mean(feature4, 3, keepdim=True) # tail.shape=(16, 2048, 16, 1)
tail = torch.mean(tail, 2, keepdim=True) # tail.shape=(16, 2048, 1, 1)
return feature3, feature4, tail
def build_contextpath(name, path_model=False):
assert name in ["resnet18", "resnet101"], "{} is not support! please use resnet18 or resnet101".format(name)
if name == "resnet18":
model = resnet18(path_model=path_model)
elif name == "resnet101":
model = resnet101(path_model=path_model)
else:
# raise "backbone is not defined!"
pass
return model
两个torch.mean函数与nn.AdaptiveAvgPool2d等价。
tail = torch.mean(feature4, 3, keepdim=True) # tail.shape=(16, 512, 16, 1)
tail = torch.mean(tail, 2, keepdim=True) # tail.shape=(16, 512, 1, 1)
# 与下述代码等价
avgpool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
tail = avgpool(feature4)
打印resnet18的self.features结果如下,这里取出前四层conv1+bn1+relu+maxpool和layer1-4:
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)
2.7 BiSeNet模型
class BiSeNet(torch.nn.Module):
def __init__(self, num_classes, context_path, path_model=None):
super().__init__()
# build spatial path
self.saptial_path = Spatial_path()
# build context path
self.context_path = build_contextpath(name=context_path, path_model=path_model)
# build attention refinement module for resnet 101
if context_path == 'resnet101':
self.attention_refinement_module1 = AttentionRefinementModule(1024, 1024)
self.attention_refinement_module2 = AttentionRefinementModule(2048, 2048)
# supervision block, 用于生成训练过程的辅助损失
self.supervision1 = nn.Conv2d(in_channels=1024, out_channels=num_classes, kernel_size=1)
self.supervision2 = nn.Conv2d(in_channels=2048, out_channels=num_classes, kernel_size=1)
# build feature fusion module
self.feature_fusion_module = FeatureFusionModule(num_classes, 3328)
elif context_path == 'resnet18':
# build attention refinement module for resnet 18
self.attention_refinement_module1 = AttentionRefinementModule(256, 256)
self.attention_refinement_module2 = AttentionRefinementModule(512, 512)
# supervision block, 用于生成训练过程的辅助损失
self.supervision1 = nn.Conv2d(in_channels=256, out_channels=num_classes, kernel_size=1)
self.supervision2 = nn.Conv2d(in_channels=512, out_channels=num_classes, kernel_size=1)
# build feature fusion module
self.feature_fusion_module = FeatureFusionModule(num_classes, 1024)
else:
print('Error: unspport context_path network \n')
# build final convolution
self.conv = nn.Conv2d(in_channels=num_classes, out_channels=num_classes, kernel_size=1)
self.init_weight()
self.mul_lr = []
self.mul_lr.append(self.saptial_path)
self.mul_lr.append(self.attention_refinement_module1)
self.mul_lr.append(self.attention_refinement_module2)
self.mul_lr.append(self.supervision1)
self.mul_lr.append(self.supervision2)
self.mul_lr.append(self.feature_fusion_module)
self.mul_lr.append(self.conv)
def init_weight(self):
for name, m in self.named_modules():
if 'context_path' not in name:
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_in', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
m.eps = 1e-5
m.momentum = 0.1
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, input):
# output of spatial path
sx = self.saptial_path(input)
# output of context path
# cx1.shape=(16, 256, 32, 32), cx2.shape=(16, 512, 16, 16), tail.shape=(16, 512, 1, 1)
cx1, cx2, tail = self.context_path(input)
cx1 = self.attention_refinement_module1(cx1) # cx1.shape=(16, 256, 32, 32)
cx2 = self.attention_refinement_module2(cx2) # cx2.shape=(16, 512, 16, 16)
cx2 = torch.mul(cx2, tail) # cx2.shape=(16, 512, 16, 16)
# upsampling, 上采样到与空间模块输出图像尺寸相同
cx1 = torch.nn.functional.interpolate(cx1, size=sx.size()[-2:], mode='bilinear') # cx1.shape=(16, 256, 64, 64)
cx2 = torch.nn.functional.interpolate(cx2, size=sx.size()[-2:], mode='bilinear') # cx2.shape=(16, 512, 64, 64)
cx = torch.cat((cx1, cx2), dim=1) # cx.shape=(16, 768, 64, 64)
if self.training == True: # 训练独有辅助损失 # 注意,这里只进行了卷积计算, 没有接bn和激活函数
cx1_sup = self.supervision1(cx1) # cx1_sup.shape=(16, 10, 64, 64)
cx2_sup = self.supervision2(cx2) # cx2_sup.shape=(16, 10, 64, 64)
cx1_sup = torch.nn.functional.interpolate(cx1_sup, size=input.size()[-2:], mode='bilinear') # cx1_sup.shape=(16, 10, 512, 512)
cx2_sup = torch.nn.functional.interpolate(cx2_sup, size=input.size()[-2:], mode='bilinear') # cx2_sup.shape=(16, 10, 512, 512)
# output of feature fusion module # sx.shape=(16, 256, 64, 64), cx.shape=(16, 768, 64, 64)
result = self.feature_fusion_module(sx, cx) # result.shape=(16, 10, 64, 64)
# upsampling
result = torch.nn.functional.interpolate(result, scale_factor=8, mode='bilinear') # result.shape=(16, 10, 512, 512)
result = self.conv(result) # result.shape=(16, 10, 512, 512)
if self.training == True: # 训练过程
return result, cx1_sup, cx2_sup # shape均为(16, 10, 512, 512)
return result # result.shape=(16, 10, 512, 512)
2.8 if 「name」 == '「main」
if __name__ == '__main__':
# 假设类别数为10, 上下文模块使用resnet18, 不加载预训练权重
model = BiSeNet(num_classes=10, context_path='resnet18')
# 16表示batch_size, 3表示图像的RGB三通道,512表示输入模型的图像尺寸
x = torch.rand(16, 3, 512, 512)
# 注意,训练和测试的输出是不同的,训练会有3个输出
model.train()
outputs, output_sup1, output_sup2 = model(x)
print(outputs.shape)
print(output_sup1.shape)
print(output_sup2.shape)
model.eval()
output = model(x)
print(type(output))
print(output.shape)
输出结果:
torch.Size([16, 10, 512, 512])
torch.Size([16, 10, 512, 512])
torch.Size([16, 10, 512, 512])
<class 'torch.Tensor'>
torch.Size([16, 10, 512, 512])
点击下方卡片关注《学姐带你玩AI》🚀🚀🚀
180+篇AI必读论文讲解视频免费领
码字不易,欢迎大家点赞评论收藏!