FII-CenterNet:关注前景的anchor-free交通场景探测器
- FII-CenterNet
- I. INTRODUCTION
- II. RELATED WORK
- C. Detectors Exploiting Segmentation Information
- III. FII-CENTERNET APPROACH
- A. 前景区域建议网络(Foreground Region Proposal Network)
- 1) 上分支提出前景区域
- 2) 自分支提出前景区域
- B. 损失函数(Loss Function)
- C. 前景分割标签生成(Foreground Segmentation Label Generation)
- D. 中景(Midground)
- E. 前景尺度信息介绍(Introduction of Foreground Scale Information)
- V. CONCLUSION
FII-CenterNet
An Anchor-Free Detector With Foreground Attention for Traffic Object Detection
FII-CenterNet:关注前景的anchor-free交通场景探测器
I. INTRODUCTION
anchor-based模型:它们的检测性能很大程度上依赖于锚点的超参数,如锚点的大小、长宽比和数量。由于仍然没有有效的方法来自主地调整这些超参数,所以它们必须逐个地被手动校准。针对这一问题,人们提出了无锚方法来提高探测器的灵活性,并得到了广泛的关注。
因此我们提出了一种新的无锚方法,通过引入前景信息到中心网络,叫做Foreground Information Introduction CenterNet (FII-CenterNet)
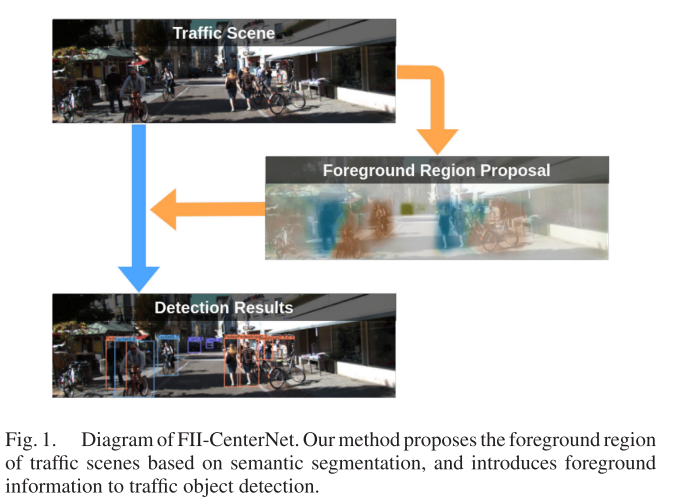
方法如图1所示:该方法提出了基于语义分割的交通场景前景区域,并将前景信息引入到交通目标检测中
综上所述,本文的主要贡献如下:
-
针对无锚点检测器,提出了一种基于语义分割的前景区域建议方法。
-
引入中景作为前景与背景的过渡区域,提供了丰富的目标边缘信息。
-
在回归过程中引入前景尺度信息,可以提高交通对象的尺度预测性能。
-
我们的方法在两个公共数据集KITTI和PASCAL VOC上进行了评估。大量的实验结果表明,FII-CenterNet有效地提高了交通目标检测的性能,在准确率和效率上都达到了最佳水平。
II. RELATED WORK
这一节还是挑没见过的看,A,B是关于Anchor-Based和Anchor-Free探测器的介绍,自行了解。
C. Detectors Exploiting Segmentation Information
语义分割是另一个重要的计算机视觉任务,广泛应用于ITS(智慧交通系统)中,如道路检测。我们的前景区域建议方法基于此。
我们使用语义分割特征来获得前景区域信息。位置信息用于生成前景区域特征图,尺度信息用于回归任务。
III. FII-CENTERNET APPROACH
特征提取:FII-CenterNet使用CenterNet中修改的DLA-34提取特征,在DLA上的具体修改:在每个上采样层用3 × 3可变形卷积替换原始卷积。
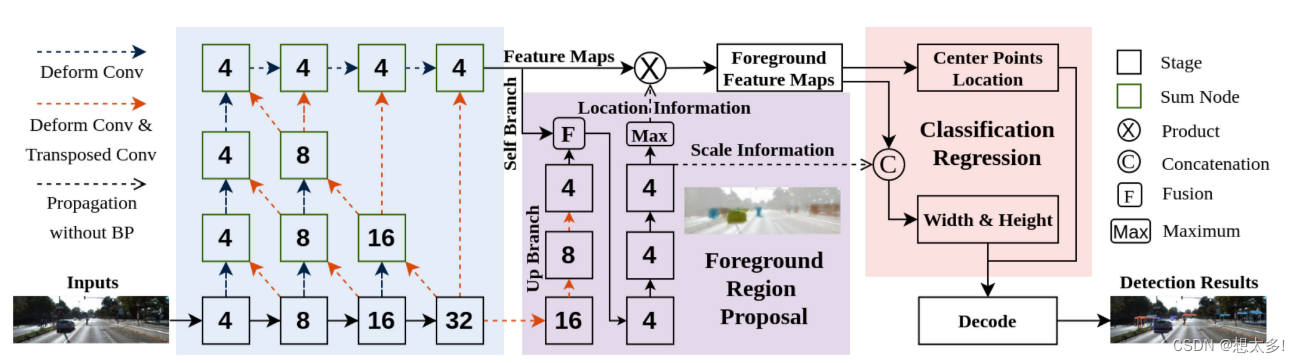
**网络模型:图2 FII-CenterNet,**如下所示:
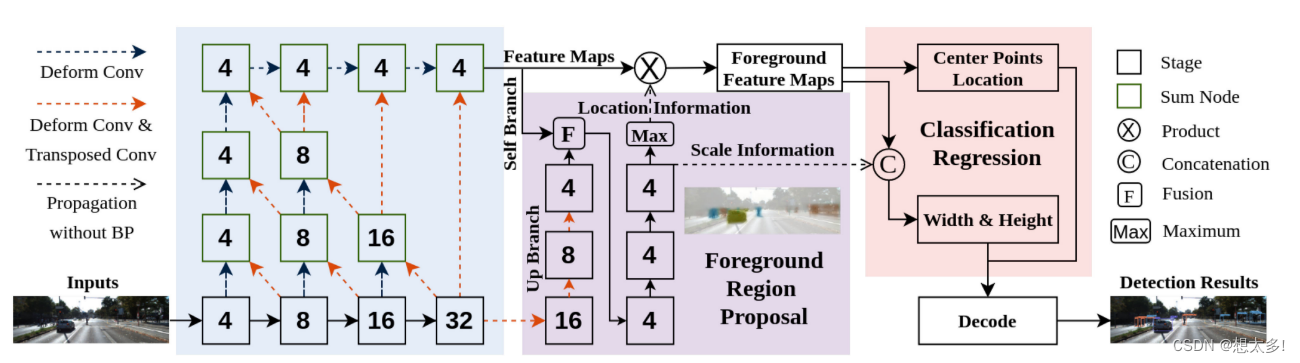
**FII-CenterNet:**前景信息引入CenterNet进行交通目标检测。方框中的数字表示到图像的步幅。在CenterNet中使用改进的DLA-34进行特征提取。它使用可变形卷积来改变通道,并使用转置卷积来对特征图进行上采样。
我们用蓝色虚线箭头表示可变形卷积,用橙子虚线箭头表示这两个步骤。黑色虚线箭头表示没有向后传播的传播。
**前景区域建议网络:**旨在估计前景区域。由DLA-34提取的特征图生成前景特征图。在数学上,设FM为特征图,FFM为前景特征图。
F
F
M
=
F
M
⊙
F
FFM=FM⊙F
FFM=FM⊙F
其中,F是前景区域建议结果,并且⊙是逐元素乘法。
在推理时,热图(heatmap)中值不小于其8连通邻居的前100个峰值被保持为中心点预测。
在回归过程中产生一个尺度预测图 S 和局部偏移量 O
尺度预测图
S
:
S
∈
R
(
W
/
R
)
×
(
H
/
R
)
×
2
,
中心点为
p
k
,
S
k
=
(
w
k
,
h
k
)
是中心点
p
k
物体的宽高
尺度预测图S:S ∈ R^{(W/R) × (H/R) ×2},中心点为p_k,Sk =(wk,hk)是中心点p_k物体的宽高
尺度预测图S:S∈R(W/R)×(H/R)×2,中心点为pk,Sk=(wk,hk)是中心点pk物体的宽高
局部偏移 O ∈ R ( W / R ) × ( H / R ) × 2 , 中心点为 p k , O k = ( δ k x , δ k y ) 局部偏移O∈ R^{(W/R) × (H/R) ×2},中心点为p_k,O_k =(δ_{kx},δ_{ky} ) 局部偏移O∈R(W/R)×(H/R)×2,中心点为pk,Ok=(δkx,δky)
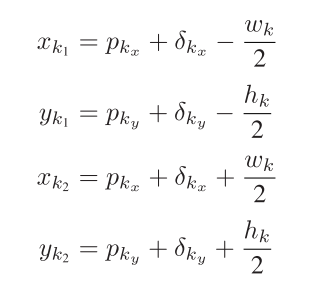
最终的检测结果被描述为边界框:
对于中心点
p
k
,对应的边界框是(
x
k
1
,
y
k
1
,
x
k
2
,
y
k
2
),其利用
p
k
和
S
k
来解码
对于中心点p_k,对应的边界框是(x_{k1},y_{k1},x_{k2},y_{k2}),其利用p_k和S_k来解码
对于中心点pk,对应的边界框是(xk1,yk1,xk2,yk2),其利用pk和Sk来解码
以下各小节的组织方式如下。
- 首先,我们在A节中提出前景区域建议网路。
- 其次,描述了网络的训练方法。损失函数和前景分割标签生成方法分别在B和C节中描述。框诱导标记会丢失物体的一些边缘信息。
- 因此,我们在D节中提出了中景的概念。
- 在E节中,我们将尺度信息引入到回归网络中,以充分利用前景信息。训练图见图3:
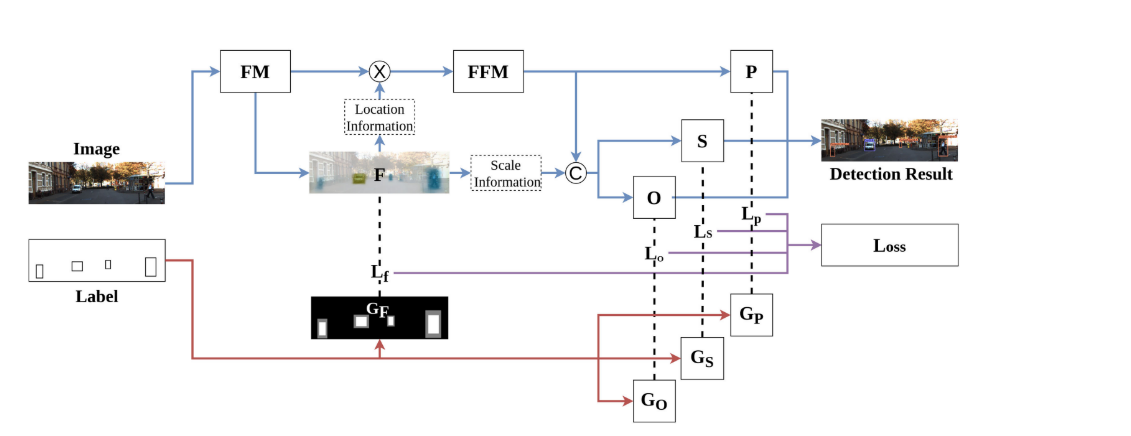
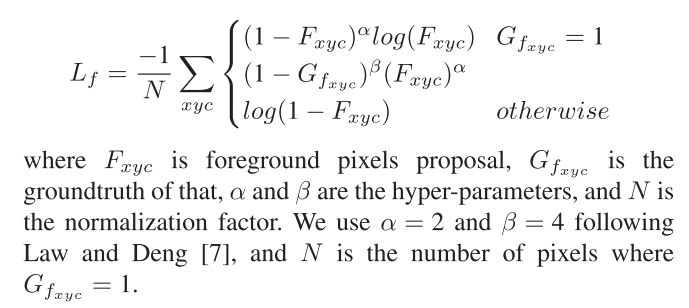
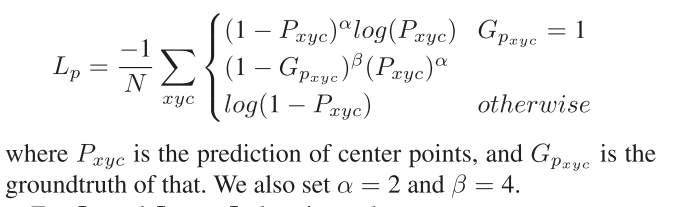
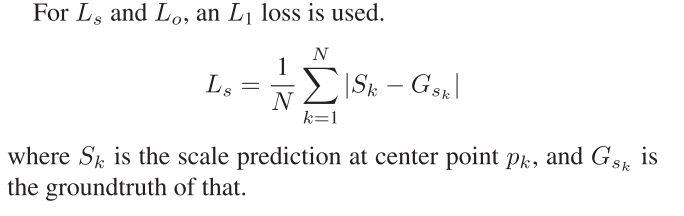
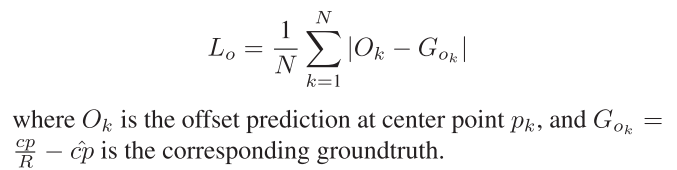
FII-CenterNet训练图。损失函数可以分为四个部分。Lf是前景区域建议网络的损失;Lp为中心点预测网络的损失;Ls为规模预测网络的损失;Lo是偏移预测网络的损耗。
A. 前景区域建议网络(Foreground Region Proposal Network)
为了实现基于语义分割的前景区域建议,有两种可行的实现方法:
-
上分支提出前景区域(Foreground Region Proposal by up Branch)
-
自分支提出前景区域(Foreground Region Proposal by self Branch)
1) 上分支提出前景区域
在该方法中,前景区域建议是基于编码器的结果,如分支在图2所示。它通过一个附加分支执行上采样操作,并使用多次连续卷积获得的结果提出前景区域。在上分支中,使用可变形卷积来改变通道,并且使用转置卷积来对特征图进行上采样。编码器-解码器结构是语义分割网络中常用的结构。
2) 自分支提出前景区域
该方法基于特征图直接执行进一步的卷积运算,如自我分支在图2所示。它直接利用提取的特征图谱,并进一步分析和处理。前景区域建议是通过多个连续旋转获得。
B. 损失函数(Loss Function)
损失函数可分为四部分:
(a)Lf是前景区域建议网络的损失;
(B)Lp是中心点预测网络的损失;
(c)Ls为规模预测网络的损失;
(d)Lo是偏移预测网络的损失。
对于Lf和Lp,使用修改的焦点损失
总损失函数为:
L
=
λ
f
L
f
+
λ
p
L
p
+
λ
s
L
s
+
λ
o
L
o
L = λ_fL_f + λ_pL_p + λ_sL_s + λ_oL_o
L=λfLf+λpLp+λsLs+λoLo
其中λf、λp、λs和λo是四个部分对应的损失权重。
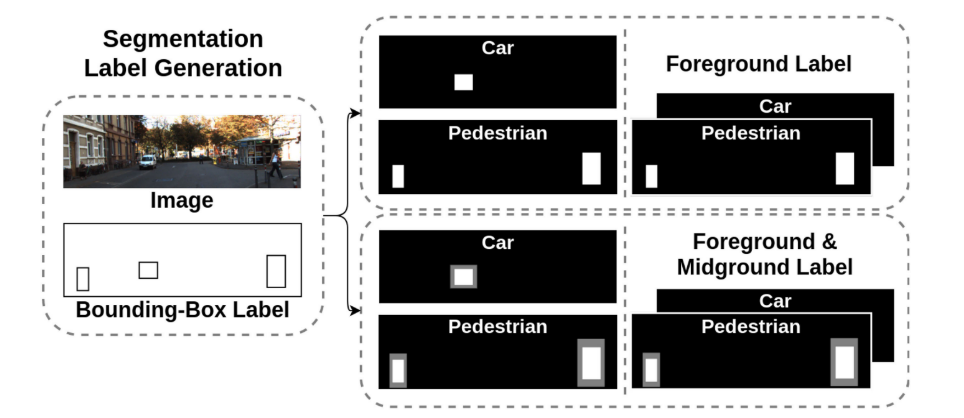
C. 前景分割标签生成(Foreground Segmentation Label Generation)
生成前景分割标签来训练前景区域建议网络,这是一种框诱导的分割标注。
**分割标签生成示意图:**分割标签从边界框标签生成。右上角是前景标签的生成。标签中引入了中景,如右下角所示。
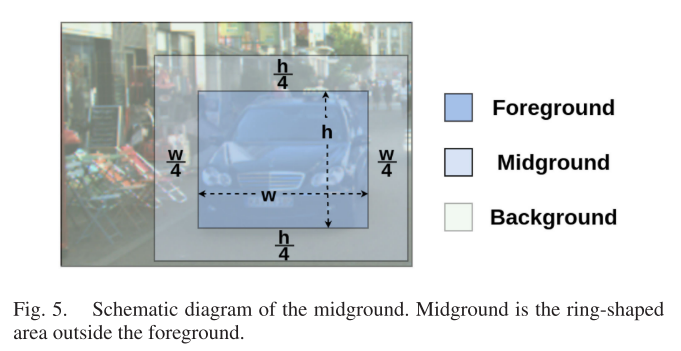
D. 中景(Midground)
值得注意的是,两阶段检测器的RPN中的一些区域既不被分类为前景也不被分类为背景。Faster R-CNN 中的锚根据与任何地面实况对象的重叠进行标记。

中景区域定义为前景区域外的环形区域,如图5所示。在生成分割标签时,中景区域的像素被设置为0.5。
E. 前景尺度信息介绍(Introduction of Foreground Scale Information)
位置信息只是前景信息的一部分。值得注意的是,由于前景区域建议网络是基于类别的,因此每个类别的建议实际上包含了对象的尺度信息。在回归过程中引入前景尺度信息可以辅助尺度预测。因此,不同类别下的前景区域建议与FII-CenterNet中的前景特征图连接作为回归的输入。
V. CONCLUSION
综上所述,为了提高无锚点检测器在交通目标检测中的性能,提出了FII-CenterNet算法,该算法引入前景信息以消除交通场景中复杂背景信息的干扰。前景区域建议网络基于语义分割,其由从边界框标签生成的分割标签监督。引入中景作为前景与背景的过渡,可以提供丰富的目标边缘信息。由于引入了前景位置和尺度信息,有效地提高了检测精度,在KITTI验证集上的实验结果验证了这一点。KITTI基准测试和PASCAL VOC 2007测试结果表明,FII-CenterNet在准确性和效率方面都达到了最先进的水平。
为了以后的研究,可以在网络中加入分割分支来处理交通对象的分割任务,这可以简单地在前景区域的基础上提出。此外,检测结果可以进一步用于其他ITS应用,例如交通拥堵检测。