认识线程
线程是一个执行流(运行代码,处理数据)
1.操作系统使用pcb来描述一个程序的运行-------pcb就是进程
2.linux下通过pcb模拟实现线程,因此linux下的线程是一个轻量级进程
3.这个轻量级进程因为公用大部分进程资源;相较于传统进程更加轻量化
进程是资源分配的基本单位----因为程序运行时资源分配给整个线程组(线程是cpu调度的基本单位-----因为linux pcb是线程)
线程之间资源的独有与共享:
独有:栈, 寄存器(自己的上下文数据[上文:处理过的数据;正文:正在处理的数据;下文:即将处理的数据]), 信号屏蔽字(那个线程拿到时间片就会处理信号,若不想让该线程处理某信号,则在该线程信号屏蔽),errno(每个线程都有自己的errno,防止errno改正后,统一被修改),线程ID,调度优先级
共享:共享虚拟地址空间(共享代码段和数据段),文件描述符表(一个线程打开文件获取文件描述符可以直接传给另一个线程,另一个线程直接进行文件操作),当前工作路径,信号处理方式(信号处理方式一致,但是具体哪一个进程去处理是不一定的),用户id/组id
多进程与多线程的优缺点分析
多线程处理任务的优点:
- 线程间通信特别方便,除了进程间的通信方式,还可以通过全局变量/传参(共享资源)
- 创建和销毁一个线程的成本相比于进程要更低
- 线程间调度相较于进程要更低
多线程处理任务的缺点:
- 线程之间缺乏访问控制,有些系统调用/异常针对的是整个进程;稳定性相比于进程更低。场景:比如创建shell这种对主程序稳定安全性要求较高的程序,就需要用多进程,让子程序来背锅
线程控制
线程创建/线程终止/线程等待/线程分离
由于linux下操作系统并没有提供线程的控制系统调用接口,封装了一个线程控制接口库。使用库函数实现创建的线程我们称之为用户态线程,这个用户态线程在内核中使用一个轻量级进程实现调度。
POSIX线程库
- 与线程有关的函数构成了一个完整的系列,绝大多数函数的名字都是以“pthread_”打头的
- 要使用这些库函数,要通过引入头文件<pthread.h>
- 链接这些线程函数库时,要使用编译器命令的"-lpthread"选项
linux下的线程:用户态线程+轻量级进程
线程创建
//int pthread_create(pthread_t * thread,const pthread_attr_t *attr,
//void* (start_routine)(void*) ,void* args);
//thread:用来获取线程id
//attr:用来设置进程属性以及栈的大小,通常置为NULL;
//start_routine:线程的入口函数
//arg:传递给进程入口函数的参数
//返回值:0表示成功,!0表示不成功
#include <stdio.h>
2 #include <unistd.h>
3 #include <pthread.h>
4
5 //线程创建,体会每个线程都是执行流
6 void* thr_entry(void* arg)
7 {
8 while(1)
9 {
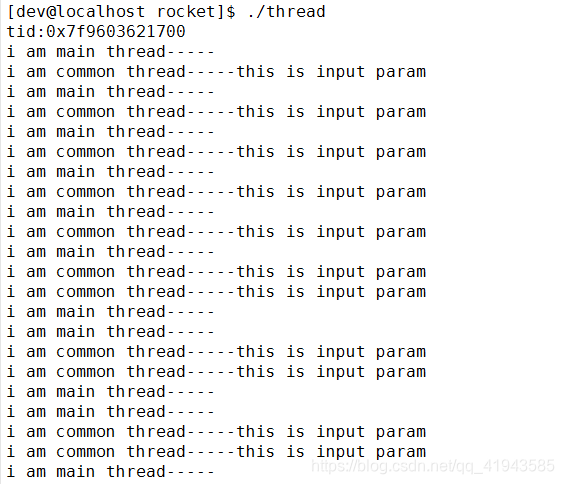
10 printf("i am common thread-----%s\n",(char*)arg);
11 sleep(1);
12 }
13 return NULL;
14 }
15
16 int main()
17 {
18 //int pthread_create(pthread_t *thread,const pthread_attr_t *attr,
19 //void* (*start_routine)(void*),void* args)
20 pthread_t tid;
W> 21 char* param = "this is input param";
22 int ret = pthread_create(&tid,NULL,thr_entry,(void*)param);
23 if(ret != 0)
24 {
25 printf("pthread create error\n");
26 return -1;
27 }
W> 28 printf("tid:%p\n",tid);
29 while(1)
30 {
31 printf("i am main thread-----\n");
32 sleep(1);
33 }
34 return 0;
35 }
ps -efL //可以查看轻量级进程
线程中的id讨论:
tid : 线程地址空间首地址,方便用户操作线程
pcd->pid 轻量级进程id(LWP)
pcb->tgid 进程(线程组)id,默认等于首线程地址id
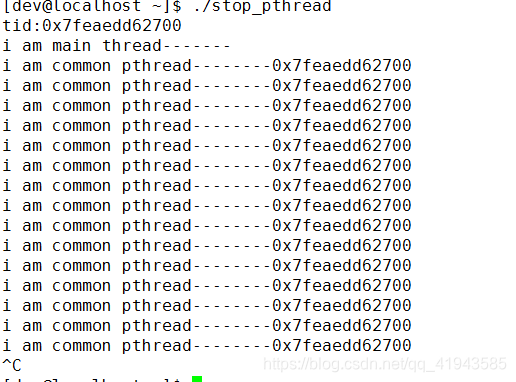
线程终止
//return 不能在main函数中return(退出的是进程-----导致所有线程退出)
//void pthread_exit(void * retval); 退出线程自身,谁调用谁退出
//retval:线程退出的返回值
//int pthread_cancel(pthread_t thread);取消其他线程,让其他线程退出
//thread:要取消的线程ID
//线程退出后,默认不会自动释放资源,(保存自己的退出结果在线程独有的地址空间中),会造成资源泄露
//主线程退出,其他线程依然可以正常运行
1 #include <stdio.h>
2 #include <unistd.h>
3 #include <pthread.h>
4
5 void* thr_entry(void* arg)
6 {
7 //pthread_exit(NULL)退出当前线程
8 pthread_cancel((pthread_t) arg);
9 pthread_t ctid;
10 ctid = pthread_self();
11 while(1){
W> 12 printf("i am common pthread--------%p\n",ctid);
13 sleep(1);
14 }
15 return NULL;
16 }
17 int main()
18 {
19 pthread_t mtid;
20 mtid = pthread_self();//获取本线程的ip地址
21 pthread_t tid;
W> 22 char* param = "this is input param";
23 int ret = pthread_create(&tid,NULL,thr_entry,(void*)mtid);
24 if(ret != 0)
25 {
26 printf("pthread create error\n");
27 return -1;
28 }
W> 29 printf("tid:%p\n",tid);
30 //pthread_cancle(tid); 取消普通线程
31 while(1){
32 printf("i am main thread-------\n");
33 sleep(1);
34 }
35 }
线程等待
概念:等待指定线程退出,获取这个线程的退出返回值,并回收这个线程的资源。
一个线程有默认属性:joinable;处于joinable属性的线程退出后为了保存返回值,因此不会自动释放资源
如果不进行等待会造成内存泄漏(一个线程只有处于joinable状态的时候,才需要被等待)
pthread_join(pthread_t tid,void **retval);
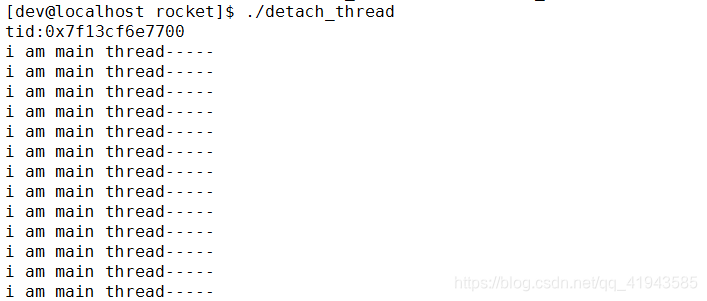
线程分离
是将线程的joinable属性修改为detach属性
线程若处于detach属性,则线程退出后将自动回收资源;并且这个线程不需要等待,因为线程返回值占用的空间已经被回收。
pthread_detach(pthread_t tid)
线程分离的适用场景:
一进入自己的线程就线程等待:pthread_detach(pthread_self());
#include <stdio.h>
2 #include <unistd.h>
3 #include <errno.h>
4 #include <pthread.h>
5
6 //线程等待
7 void* thr_entry(void* arg)
8 {
9 pthread_detach(pthread_self());
10 sleep(3);
W> 11 char* ptr = "hello";
12 pthread_exit(ptr);
13 pthread_cancel((pthread_t)arg);
14 while(1)
15 {
16 printf("i am common thread----%s\n",(char*)arg);
17 sleep(1);
18 }
19 }
20
21 int main()
22 {
23 pthread_t mtid;
#include <stdio.h>
2 #include <unistd.h>
3 #include <errno.h>
4 #include <pthread.h>
5
6 //线程等待
7 void* thr_entry(void* arg)
8 {
9 pthread_detach(pthread_self());
10 sleep(3);
W> 11 char* ptr = "hello";
12 pthread_exit(ptr);
13 pthread_cancel((pthread_t)arg);
14 while(1)
15 {
16 printf("i am common thread----%s\n",(char*)arg);
17 sleep(1);
18 }
19 }
20
21 int main()
22 {
23 pthread_t mtid;
线程安全
多个线程同时对临界资源进行访问而不会造成数据二异性
如何实现线程安全:
同步:时序合理性
互斥:对临界资源同一时间的访问唯一性
线程间互斥实现:互斥锁
- 1.定义互斥锁变量
pthread_mutex_t
- 2.对互斥锁变量进行初始化
pthread_mutex_init(mutex,attr);
//mutex : 互斥锁变量
//attr: 初始化互斥锁属性---通常置NULL
- 3.对临界资源操作之前先加锁 [在对临界资源操作之前加锁],若可以加锁则直接修改计数,函数返回;否则挂起等待
pthread_mutex_lock(&mutex);
pthread_mutex_trylock // pthread_mutex_timedlock
- 4.对临界资源操作完毕后进行解锁 [在对临界资源操作之后立即解锁,线程退出之前也要解锁]
pthread_mutex_unlock(&mutex)
5.销毁互斥锁
pthread_mutex_destory(&mutex)
死锁:多个线程对锁资源进行竞争访问,但是因为推进顺序不当导致相互等待,以至于程序无法往下运行
死锁产生的四个必要条件
1.互斥条件:一个锁只有一个线程可以获取
2.不可剥夺条件:我上的锁别人不可以解
3.请求与保持条件:拿着A锁去请求B锁,若获取不到B锁,也不会释放A锁。
4.环路等待条件:A拿着A锁去请求B锁,B拿着B锁去请求A锁。
死锁预防:避免这4个必要条件
死锁避免:死锁检测算法,银行家算法
线程同步
线程同步的实现:等待+唤醒
操作不满足等待条件,别人促使等待条件满足后唤醒等待
条件变量:
条件变量实现同步:用户在对临界资源访问之前,先判断是否能够操作,若可以,线程直接操作;若不能,条件变量提供等待条件,让pcb在等待队列上。其他线程促使操作条件满足,唤醒条件变量等待队列上的线程。
1.定义条件变量:pthread_cond_t cond
2.条件变量初始化:pthread_cond_init(&cond,&attr)
3.用户在判断条件不满足的情况下提供等待功能 pthread_cond_wait(&cond,&mutex);
为什么条件变量要与互斥锁一起使用:线程什么时候等待,需要一个判断条件;这个判断条件也是临界资源(等待了之后,其他线程需要促使这个条件满足(修改临界资源));因此这个临界资源的操作就需要受保护(默认使用互斥锁实现保护)
4..用户在促使条件满足条件后,唤醒等待 pthread_cond_signal (唤醒至少一个线程)
pthread_cond_broadcast(唤醒所有线程)



![[附源码]java毕业设计壹家吃货店网站](https://img-blog.csdnimg.cn/d586f2c9518e43f09e01d5d0c96aeb10.png)