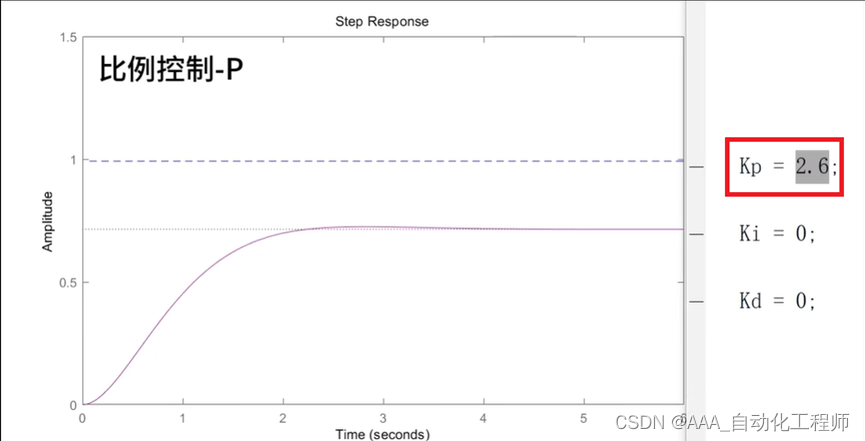
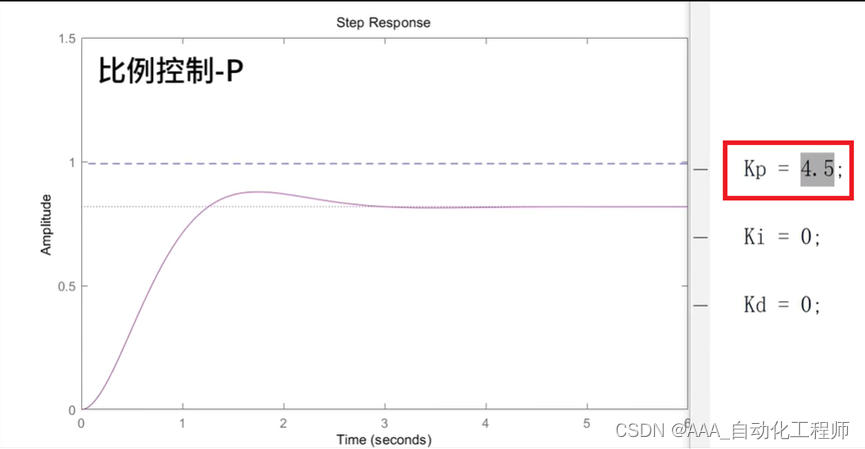
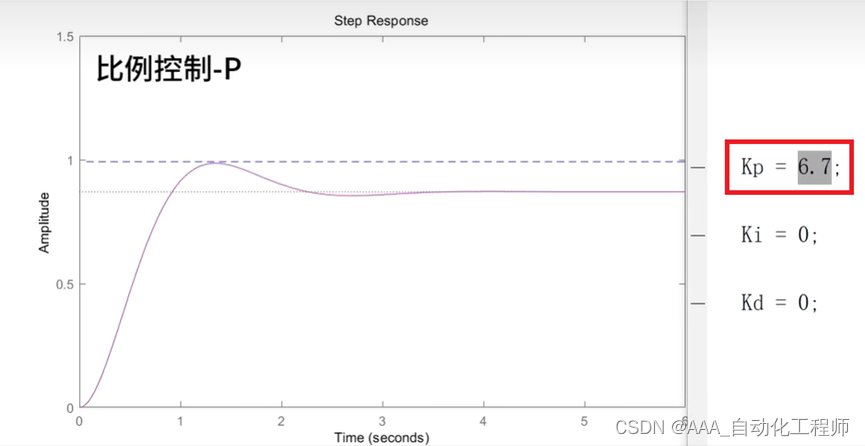
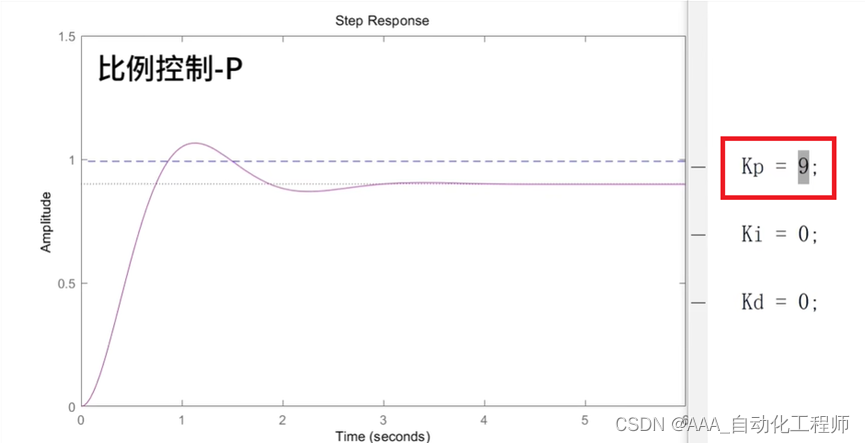
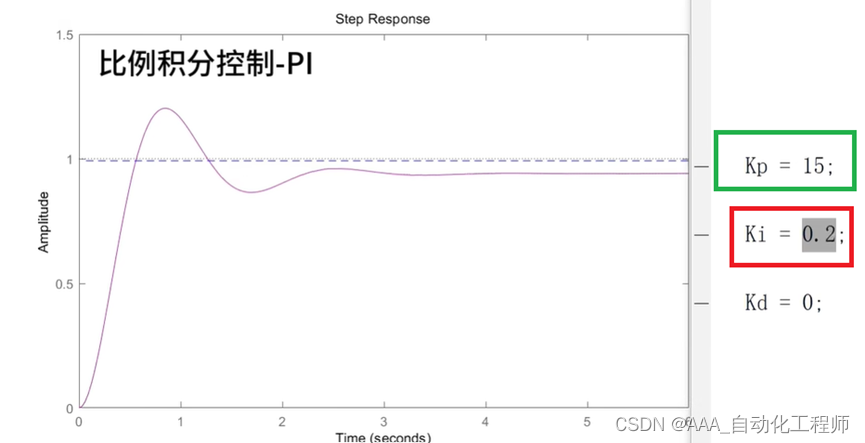
PID控制原理基本介绍(图解)
news2026/2/12 19:13:22

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/30825.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
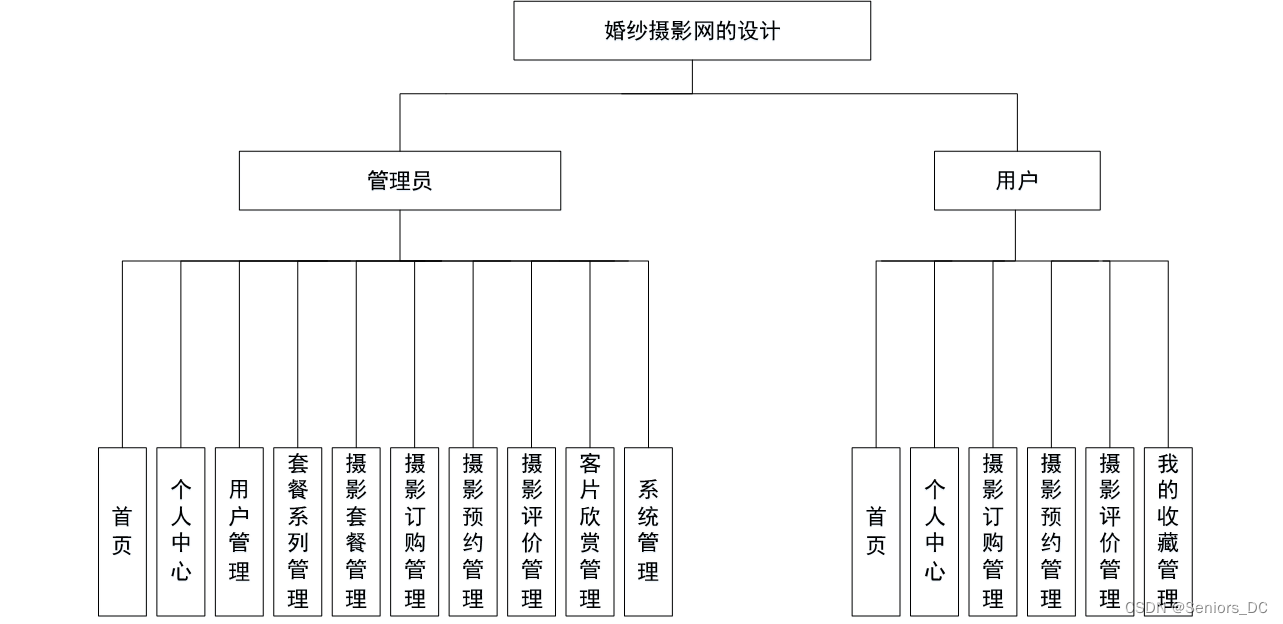
SSM毕设项目 - 基于SSM的婚纱摄影网站(含源码+论文)
文章目录1 项目简介2 实现效果2.1 界面展示3 设计方案3.1 概述3.2 系统流程3.2.1 系统开发流程3.3 系统结构设计4 项目获取1 项目简介
Hi,各位同学好呀,这里是M学姐!
今天向大家分享一个今年(2022)最新完成的毕业设计项目作品,【…

OPNET Modeler 的安装及其相关配置
文章目录前言一、安装包下载1、OPNET Modeler 安装包下载2、Visual Studio 2010 安装包下载二、配置C/C环境变量三、OPNET Modeler 的安装1、安装 modeler_145A_PL1_7116_win2、安装 modeler_docs_28-Jan-2008_win3、安装 models_145A_PL1_27Feb08_win4、安装 OPNET.Modeler.14…

PLC中ST编程的基础知识
程序组织单元,简称POU;完整的PLC程序就是由无数个POU组成的;
FB:功能块,也称函数块,执行时产生一个或多个值,一个功能块可以创建多个实例;
VAR_IN:输入变量,…

java绘制标注框,注册字体
文章目录场景思路步骤1.注册字体2.绘制标注框保存文本3.效果如下:场景 有个项目需要在java的后台将AI算法的标识框,置信度值,画到上传的报警图片上。以前都在算法部分画,但是效率有点低,所以传过来原始的图片(也会用来…

第三章:JVM监控及诊断工具-GUI篇
JVM监控及诊断工具-GUI篇
使用上一章命令行工具或组合能帮您获取目标Java应用性能相关的基础信息,但它们存在下列局限:
无法获取方法级别的分析数据,如方法间的调用关系、各方法的调用次数和调用时间等(这对定位应用性能瓶颈至关重要)。要求用户登录到…

手写一个react,看透react运行机制
适合人群
本文适合0.5~3年的react开发人员的进阶。
讲讲废话:
react的源码,的确是比vue的难度要深一些,本文也是针对初中级,本意让博友们了解整个react的执行过程。
写源码之前的必备知识点
JSX
首先我们需要了解什么是JSX。…

Flutter高仿微信-第19篇-支付-我的零钱
Flutter高仿微信系列共59篇,从Flutter客户端、Kotlin客户端、Web服务器、数据库表结构、Xmpp即时通讯服务器、视频通话服务器、腾讯云服务器全面讲解。
详情请查看 效果图: 实现代码:
/*** Author : wangning* Email : maoning20080809163.…
Unity DOTS学习 前置知识(一)
DOTS是什么
Data-Oriented Technology Stack(面向数据的技术栈)
Unity 使用的5个核心包:
The C# job system 提供快速安全的多线程操作The Burst compiler 优化C#代码的编译器,能够编译生成比mono或者L2CPP更快的代码。可以编译Unity中的任何代码Unit…

解决传统难题,WMS系统实现信息数据实时追踪
随着社会经济的发展,传统仓库的存储和做工难以适应当下市场经济的需求。仓库需要进行转型升级,从而适应当下的环境。在仓库的转型升级过程当中,WMS系统是不可或缺的一部分内容。
而WMS系统的应用会从多方面支持仓库的转型升级,其带…
uniapp之最新获取用户昵称以及头像
前言
在uniapp登录时候最开始想的就是手机号登录之后,就获取用户的昵称以及头像,存储起来,登录的时候直接显示在我的页面,最开始使用的是 uniapp官网自带的uni.getUserProfile的方法,就可以获取用户的头像跟昵称&…

Prometheus Operator与kube-prometheus之二-如何监控1.23+ kubeadm集群
简介
系列文章: 标签 - Prometheus - 东风微鸣技术博客 (ewhisper.cn)Prometheus Operator 的上一篇: Prometheus Operator 与 kube-prometheus 之一 - 简介 - 东风微鸣技术博客 (ewhisper.cn)
kube-prometheus-stack捆绑了监控Kubernetes 集群所需的Prometheus Operator、Ex…
Web(二)html5基础-表格基本结构
第1关_网页表格的基本概念 第2关_创建简单的表格
本关任务:创建一个两行两列的表格。 相关知识:为了完成本关任务,你需要掌握:1.表格的结构及对应的标签,2.表格标签的属性。 表格的结构及对应的标签。一个基本的表格是…
Netty系列(二):Netty拆包/沾包问题的解决方案
上一篇说到Netty系列(一):Springboot整合Netty,自定义协议实现,本文聊一些拆包/沾包问题。
拆包/沾包问题
TCP是面向字节流的协议,在发送方发送的若干包数据到接收方接收时,这些数据包可能会被…
JaCoCo增量覆盖率的基本实现原理
什么是增量覆盖率 如图所示,在master分支提交了HelloController,然后从master拉了个新分支test;提交了第1次代码,增加了WorldController;提交了第2次代码,增加了DonController。增量的获取方式有两种&#…
报表工具使用教程-FineReport决策报表导出Plus
前言
通过决策报表导出插件,用户可以将单张决策报表导出为 Excel ,PDF,Word 格式文件。
那么用户如何将决策报表导出为 PPT 或 Image 格式文件呢?如何将多张决策报表合并导出至一个文件呢?
1.实现思路
用户通过安装…
![静态时序分析简明教程(七)]端口延迟](https://img-blog.csdnimg.cn/fbdefe7078d94d7da9697da49cf5730a.png)
静态时序分析简明教程(七)]端口延迟
端口延迟一、写在前面1.1 快速导航链接二、端口延迟2.1 输入有效2.2 输出有效2.3 set_input_delay2.3.1 -clock clock_name2.3.2 -clock_fall2.3.3 -level_sensitive2.3.4 -rise/fall2.3.5 min/max2.3.6 -add_delay2.3.7 时钟延迟2.4 set_output_delay三、总结一、写在前面
一…
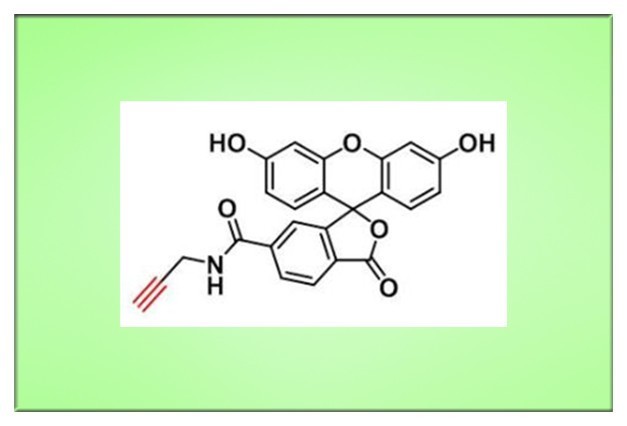
点击化学FAM荧光素:6-FAM-alkyne,FAM alkyne 6-isomer,6-炔基-羧基荧光素
【中文名称】6-炔基-羧基荧光素 【英文名称】 FAM alkyne,6-isomer,6-FAM-alkyne 【CAS】478801-49-9 【分子式】C24H15NO6 【分子量】413.39 【纯度标准】95% 【包装规格】25mg,50mg,100mg 【是否接受定制】可进行定制,定制时间周…

Kubernetes安装可视化界面
安装可视化界面编写配置文件安装kubernetes-dashboard创建访问账号访问可视化界面dashboard是kubernetes官方提供的可视化界面。
https://github.com/kubernetes/dashboard编写配置文件
创建配置文件存放目录并切换到其中:
mkdir /usr/local/kubernetes-dashboard…
java面试强基(10)
Exception 和 Error 有什么区别?
在 Java 中,所有的异常都有一个共同的祖先 java.lang 包中的 Throwable 类。Throwable 类有两个重要的子类:
Exception :程序本身可以处理的异常,可以通过 catch 来进行捕获。Exception 又可以分为 Checke…