原文:https://mp.weixin.qq.com/s/BDHXQHXSzDk-RTi-VNMNEw
1 scipy.optimize简介
该scipy.optimize包提供几种常用的优化算法。
该模块包含:
1、使用多种算法(例如BFGS,Nelder-Mead单形,牛顿共轭梯度,COBYLA或SLSQP)对多元标量函数进行无约束和无约束的最小化(最小化)
2、全局(强力)优化例程(例如,盆地跳动,differential_evolution)
3、最小二乘最小化(least_squares)和曲线拟合(curve_fit)算法
4、标量单变量函数最小化器(minimum_scalar)和根查找器(牛顿)
5、使用多种算法(例如,混合鲍威尔,莱文贝格-马夸特或大型方法,例如牛顿-克里洛夫)的多元方程组求解器(root)。
详见:
https://docs.scipy.org/doc/scipy/reference/optimize.html
# https://docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.minimize.html
from scipy.optimize import minimize
scipy.optimize.minimize(
fun, #可调用的目标函数。
x0, #ndarray,初值。(n,)
args=(), #额外的参数传递给目标函数及其导数
method=None, #类型的解算器。应该是其中之一:
#‘Nelder-Mead’、‘Powell’
#‘CG’、‘BFGS’
#‘Newton-CG’、‘L-BFGS-B’
#‘TNC’、‘COBYLA’
#‘SLSQP’、‘dogleg’
#‘trust-ncg’
jac=None, #目标函数的雅可比矩阵(梯度向量)。
#仅适用于CG, BFGS, Newton-CG,
#L-BFGS-B, TNC, SLSQP, dogleg,
#trust-ncg。如果jac是一个布尔值,
#且为True,则假定fun将随目标函数返回
#梯度。如果为False,则用数值方法估计梯
#度。Jac也可以是返回目标梯度的可调用对
#象。在这种情况下,它必须接受与乐趣相同
#的论点。
hess=None,
hessp=None,#目标函数的Hessian(二阶导数矩阵)或
#目标函数的Hessian乘以任意向量p。
#仅适用于Newton-CG, dogleg,
#trust-ncg。只需要给出一个hessp或
#hess。如果提供了hess,则将忽略
#hessp。如果不提供hess和hessp,则用
#jac上的有限差分来近似Hessian积。
#hessp必须计算Hessian乘以任意向量。
bounds=None, #变量的边界(仅适用于L-BFGS-B,
#TNC和SLSQP)。(min, max)
#对x中的每个元素,定义该参数的
#边界。当在min或max方向上没有边界
#时,使用None表示其中之一。
constraints=(), #约束定义
#(仅适用于COBYLA和SLSQP)
# 类型有: ‘eq’ for equality, ‘ineq’ for inequality
tol=None, #终止的边界。
callback=None,
options=None)
返回值: res : OptimizeResult
#以OptimizeResult对象表示的优化结果。重要的属性有:x是解决方案数组,
#success是一个布尔标志,指示优化器是否成功退出,以及描述终止原因的消息。
2 无约束最小化多元标量函数
2.1 单纯形法:Nelder-Mead
函数Rosenbrock :
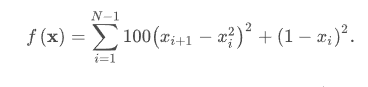
x=1时,取最小值。
def rosen(x):
"""The Rosenbrock function"""
return sum(100.0 * (x[1:] - x[:-1] ** 2.0) ** 2.0 + (1 - x[:-1]) ** 2.0)
求解:
import numpy as np
from scipy.optimize import minimize
# 初始迭代点
x0 = np.array([1.3, 0.7, 0.8, 1.9, 1.2])
# 最小化优化器,方法:Nelder-Mead(单纯形法)
res = minimize(rosen, x0, method='nelder-mead',
options={'xatol': 1e-8, 'disp': True})
print(res.x)
#
Optimization terminated successfully.
Current function value: 0.000000
Iterations: 339
Function evaluations: 571
[1. 1. 1. 1. 1.]
求带有参数的 Rosenbrock 函数:

def rosen_with_args(x, a, b):
"""The Rosenbrock function with additional arguments"""
return sum(a*(x[1:]-x[:-1]**2.0)**2.0 + (1-x[:-1])**2.0) + b
res = minimize(rosen_with_args, x0, method='nelder-mead',
args=(0.5, 1.), options={'xatol': 1e-8, 'disp': True})
2.2 拟牛顿法:BFGS算法
介绍:
https://blog.csdn.net/jiang425776024/article/details/87602847
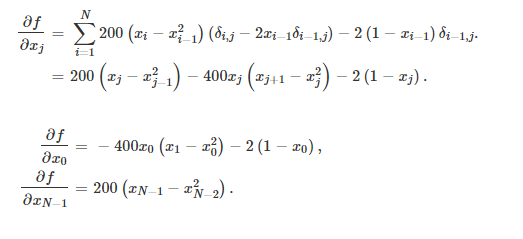
Rosenbrock导数:
def rosen_der(x):
# rosen函数的雅可比矩阵
xm = x[1:-1]
xm_m1 = x[:-2]
xm_p1 = x[2:]
der = np.zeros_like(x)
der[1:-1] = 200 * (xm - xm_m1 ** 2) - 400 * (xm_p1 - xm ** 2) * xm - 2 * (1 - xm)
der[0] = -400 * x[0] * (x[1] - x[0] ** 2) - 2 * (1 - x[0])
der[-1] = 200 * (x[-1] - x[-2] ** 2)
return der
求解:
# 初始迭代点
res = minimize(rosen, x0, method='BFGS', jac=rosen_der,
options={'disp': True})
print(res.x)
提供梯度信息的另一种方法是编写一个返回目标和梯度的函数:这可以通过设置jac=True来表示。在这种情况下,要优化的Python函数必须返回一个元组,其第一个值是目标,第二个值表示梯度。
def rosen_and_der(x):
objective = sum(100.0*(x[1:]-x[:-1]**2.0)**2.0 + (1-x[:-1])**2.0)
xm = x[1:-1]
xm_m1 = x[:-2]
xm_p1 = x[2:]
der = np.zeros_like(x)
der[1:-1] = 200*(xm-xm_m1**2) - 400*(xm_p1 - xm**2)*xm - 2*(1-xm)
der[0] = -400*x[0]*(x[1]-x[0]**2) - 2*(1-x[0])
der[-1] = 200*(x[-1]-x[-2]**2)
return objective, der
res = minimize(rosen_and_der, x0, method='BFGS', jac=True,
options={'disp': True})
2.3 牛顿法:Newton-CG
利用黑塞矩阵和梯度来优化。
介绍:
https://blog.csdn.net/jiang425776024/article/details/87602847
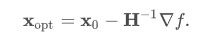
构造目标函数的近似二次型(泰勒展开):

利用黑塞矩阵H和梯度做迭代:
黑塞矩阵:
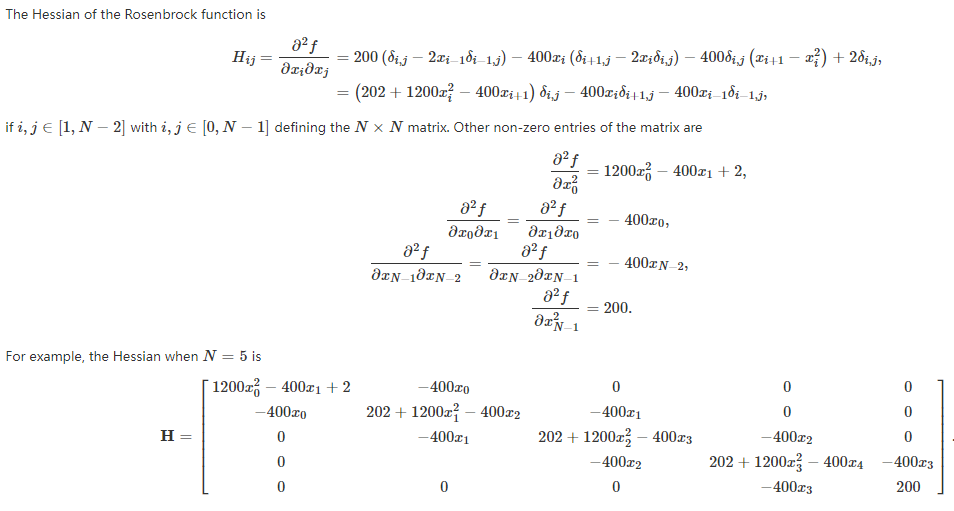
def rosen_hess(x):
x = np.asarray(x)
H = np.diag(-400*x[:-1],1) - np.diag(400*x[:-1],-1)
diagonal = np.zeros_like(x)
diagonal[0] = 1200*x[0]**2-400*x[1]+2
diagonal[-1] = 200
diagonal[1:-1] = 202 + 1200*x[1:-1]**2 - 400*x[2:]
H = H + np.diag(diagonal)
return H
res = minimize(rosen, x0, method='Newton-CG',
jac=rosen_der, hess=rosen_hess,
options={'xtol': 1e-8, 'disp': True})
res.x
# array([1., 1., 1., 1., 1.])
对于较大的最小化问题,存储整个Hessian矩阵会消耗大量的时间和内存。可将矩阵写成目标函数的形式:
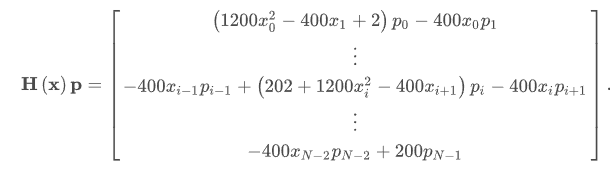
def rosen_hess_p(x, p):
x = np.asarray(x)
Hp = np.zeros_like(x)
Hp[0] = (1200*x[0]**2 - 400*x[1] + 2)*p[0] - 400*x[0]*p[1]
Hp[1:-1] = -400*x[:-2]*p[:-2]+(202+1200*x[1:-1]**2-400*x[2:])*p[1:-1] \
-400*x[1:-1]*p[2:]
Hp[-1] = -400*x[-2]*p[-2] + 200*p[-1]
return Hp
res = minimize(rosen, x0, method='Newton-CG',
jac=rosen_der, hessp=rosen_hess_p,
options={'xtol': 1e-8, 'disp': True})
res.x
# array([1., 1., 1., 1., 1.])
当Hessian条件不佳时,Newton-CG算法可能是低效的,因为在这些情况下,该方法提供的搜索方向质量很差。trust-ncg方法可以更有效地处理这种有问题的情况,下面将对此进行描述。
2.4 共轭梯度算法:trust-krylov
与trust-ncg方法类似,trust-krylov方法是一种适用于大规模问题的方法,因为它只使用hessian作为线性算子,通过矩阵-向量乘积。它比trust-ncg方法更准确地解决了二次子问题。
Newton-CG方法是一种直线搜索方法:它找到一个搜索方向,使函数的二次逼近最小化,然后使用直线搜索算法找到该方向(接近)的最佳步长。另一种方法是,首先固定步长限制,然后通过求解以下二次问题在给定信任半径内找到最优步长:
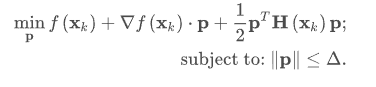
根据二次模型与实函数的一致程度,更新解 x k + 1 = x k + p x_{k+1}=x_k+p xk+1=xk+p,调整信任半径 Δ \Delta Δ。这类方法称为信任域方法(trust-region methods)。trust-ncg算法是一种利用共轭梯度算法求解信任域子问题的信任域方法。
# Full Hessian example
res = minimize(rosen, x0, method='trust-ncg',
jac=rosen_der, hess=rosen_hess,
options={'gtol': 1e-8, 'disp': True})
# Hessian product example
res = minimize(rosen, x0, method='trust-ncg',
jac=rosen_der, hessp=rosen_hess_p,
options={'gtol': 1e-8, 'disp': True})
3 约束最小化多元标量函数
最小化函数提供了约束最小化算法,即’trust-constr’, ‘SLSQP’和’COBYLA’。它们要求使用稍微不同的结构来定义约束。
方法’trust-constr’要求将约束定义为线性约束和非线性约束对象的序列。
另一方面,方法’SLSQP’和’COBYLA’要求将约束定义为一个字典序列,包含键type、fun和jac。
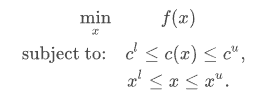
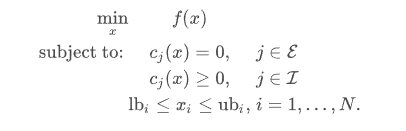
3.1 信任域:trust-constr
信任域约束方法处理的约束最小化问题形式为:
- 定义约束的边界:

from scipy.optimize import Bounds
bounds = Bounds([0, -0.5], [1.0, 2.0])
- 定义线性约束

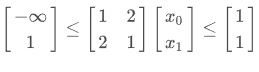
from scipy.optimize import LinearConstraint
linear_constraint = LinearConstraint([[1, 2], [2, 1]], [-np.inf, 1], [1, 1])
- 定义非线性约束
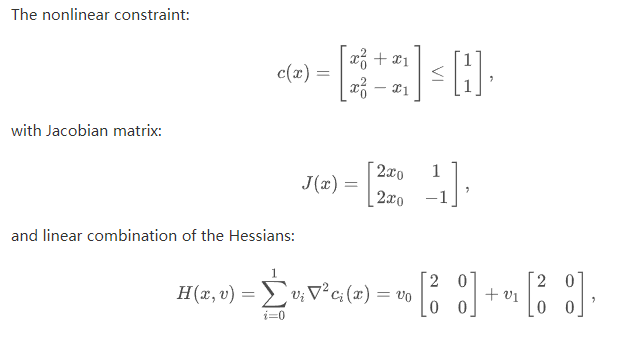
def cons_f(x):
return [x[0]**2 + x[1], x[0]**2 - x[1]]
def cons_J(x):
return [[2*x[0], 1], [2*x[0], -1]]
def cons_H(x, v):
return v[0]*np.array([[2, 0], [0, 0]]) + v[1]*np.array([[2, 0], [0, 0]])
from scipy.optimize import NonlinearConstraint
nonlinear_constraint = NonlinearConstraint(cons_f, -np.inf, 1, jac=cons_J, hess=cons_H)
x0 = np.array([0.5, 0])
res = minimize(rosen, x0, method='trust-constr', jac=rosen_der, hess=rosen_hess,
constraints=[linear_constraint, nonlinear_constraint],
options={'verbose': 1}, bounds=bounds)
# may vary
# `gtol` termination condition is satisfied.
# Number of iterations: 12, function evaluations: 8, CG iterations: 7,
# optimality: 2.99e-09, constraint violation: 1.11e-16, execution time:
# 0.016 s.
print(res.x)
# [0.41494531 0.17010937]
3.2 顺序最小二乘规划算法:SLSQP
约束形式:
ineq_cons = {'type': 'ineq',
'fun' : lambda x: np.array([1 - x[0] - 2*x[1],
1 - x[0]**2 - x[1],
1 - x[0]**2 + x[1]]),
'jac' : lambda x: np.array([[-1.0, -2.0],
[-2*x[0], -1.0],
[-2*x[0], 1.0]])}
eq_cons = {'type': 'eq',
'fun' : lambda x: np.array([2*x[0] + x[1] - 1]),
'jac' : lambda x: np.array([2.0, 1.0])}
注意这里的不等式是≥0,与pymoo(≤0)相反。
x0 = np.array([0.5, 0])
res = minimize(rosen, x0, method='SLSQP', jac=rosen_der,
constraints=[eq_cons, ineq_cons], options={'ftol': 1e-9, 'disp': True},
bounds=bounds)
# may vary
Optimization terminated successfully. (Exit mode 0)
Current function value: 0.342717574857755
Iterations: 5
Function evaluations: 6
Gradient evaluations: 5
print(res.x)
# [0.41494475 0.1701105 ]
3.3 最小二乘:least_squares
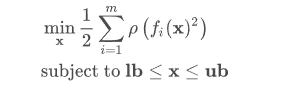
这里的f表示损失函数。
假设其为:

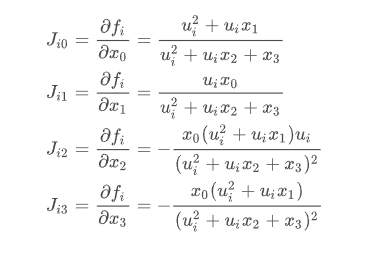
其导数:
约束:

from scipy.optimize import least_squares
def model(x, u):
return x[0] * (u ** 2 + x[1] * u) / (u ** 2 + x[2] * u + x[3])
def fun(x, u, y):
return model(x, u) - y
def jac(x, u, y):
J = np.empty((u.size, x.size))
den = u ** 2 + x[2] * u + x[3]
num = u ** 2 + x[1] * u
J[:, 0] = num / den
J[:, 1] = x[0] * u / den
J[:, 2] = -x[0] * num * u / den ** 2
J[:, 3] = -x[0] * num / den ** 2
return J
u = np.array([4.0, 2.0, 1.0, 5.0e-1, 2.5e-1, 1.67e-1, 1.25e-1, 1.0e-1,
8.33e-2, 7.14e-2, 6.25e-2])
y = np.array([1.957e-1, 1.947e-1, 1.735e-1, 1.6e-1, 8.44e-2, 6.27e-2,
4.56e-2, 3.42e-2, 3.23e-2, 2.35e-2, 2.46e-2])
x0 = np.array([2.5, 3.9, 4.15, 3.9])
res = least_squares(fun, x0, jac=jac, bounds=(0, 100), args=(u, y), verbose=1)
# may vary
`ftol` termination condition is satisfied.
Function evaluations 130, initial cost 4.4383e+00, final cost 1.5375e-04, first-order optimality 4.92e-08.
res.x
# array([ 0.19280596, 0.19130423, 0.12306063, 0.13607247])
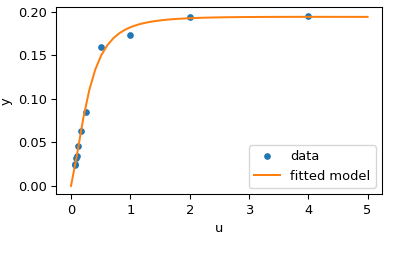
import matplotlib.pyplot as plt
u_test = np.linspace(0, 5)
y_test = model(res.x, u_test)
plt.plot(u, y, 'o', markersize=4, label='data')
plt.plot(u_test, y_test, label='fitted model')
plt.xlabel("u")
plt.ylabel("y")
plt.legend(loc='lower right')
plt.show()
4 单变量函数最小化器
from scipy.optimize import minimize_scalar
f = lambda x: (x - 2) * (x + 1)**2
res = minimize_scalar(f, method='brent')
print(res.x)
# 1.0
5 有界最小化
from scipy.special import j1
res = minimize_scalar(j1, bounds=(4, 7), method='bounded')
res.x
# 5.33144184241
6 自定义最小化器
from scipy.optimize import OptimizeResult
def custmin(fun, x0, args=(), maxfev=None, stepsize=0.1,
maxiter=100, callback=None, **options):
bestx = x0
besty = fun(x0)
funcalls = 1
niter = 0
improved = True
stop = False
while improved and not stop and niter < maxiter:
improved = False
niter += 1
for dim in range(np.size(x0)):
for s in [bestx[dim] - stepsize, bestx[dim] + stepsize]:
testx = np.copy(bestx)
testx[dim] = s
testy = fun(testx, *args)
funcalls += 1
if testy < besty:
besty = testy
bestx = testx
improved = True
if callback is not None:
callback(bestx)
if maxfev is not None and funcalls >= maxfev:
stop = True
break
return OptimizeResult(fun=besty, x=bestx, nit=niter,
nfev=funcalls, success=(niter > 1))
x0 = [1.35, 0.9, 0.8, 1.1, 1.2]
res = minimize(rosen, x0, method=custmin, options=dict(stepsize=0.05))
res.x
# array([1., 1., 1., 1., 1.])
7 找根
- 单变量
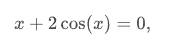
from scipy.optimize import root
def func(x):
return x + 2 * np.cos(x)
sol = root(func, 0.3)
sol.x
# array([-1.02986653])
sol.fun
# array([ -6.66133815e-16])
- 多变量
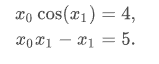
def func2(x):
f = [x[0] * np.cos(x[1]) - 4,
x[1]*x[0] - x[1] - 5]
df = np.array([[np.cos(x[1]), -x[0] * np.sin(x[1])],
[x[1], x[0] - 1]])
return f, df
sol = root(func2, [1, 1], jac=True, method='lm')
sol.x
# array([ 6.50409711, 0.90841421])
8 线性规划
问题:
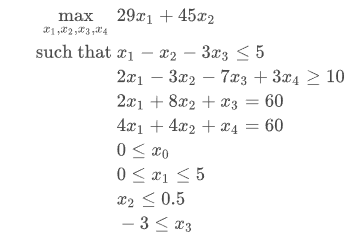
上述是最大小,需要转换成最小化,才可使用求解器linprog。

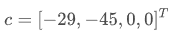
定义 x:
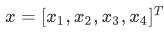
则目标函数的系数为:
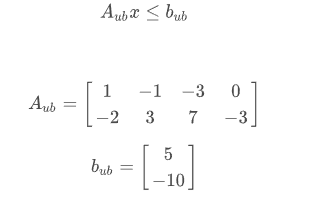
考虑两个不等式约束条件。
第一个是“小于”不等式,所以它已经是linprog所接受的形式。第二个是“大于”不等式,所以需要在两边同时乘以-1,将其转化为“小于”不等式。
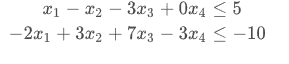
准换成矩阵形式:
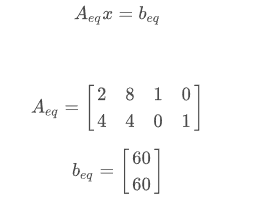
考虑两个等式:
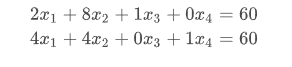
矩阵形式:
from scipy.optimize import linprog
c = np.array([-29.0, -45.0, 0.0, 0.0])
A_ub = np.array([[1.0, -1.0, -3.0, 0.0],
[-2.0, 3.0, 7.0, -3.0]])
b_ub = np.array([5.0, -10.0])
A_eq = np.array([[2.0, 8.0, 1.0, 0.0],
[4.0, 4.0, 0.0, 1.0]])
b_eq = np.array([60.0, 60.0])
x0_bounds = (0, None)
x1_bounds = (0, 5.0)
x2_bounds = (-np.inf, 0.5) # +/- np.inf can be used instead of None
x3_bounds = (-3.0, None)
bounds = [x0_bounds, x1_bounds, x2_bounds, x3_bounds]
result = linprog(c, A_ub=A_ub, b_ub=b_ub, A_eq=A_eq, b_eq=b_eq, bounds=bounds)
print(result)
con: array([15.5361242 , 16.61288005]) # may vary
fun: -370.2321976308326 # may vary
message: 'The algorithm terminated successfully and determined that the problem is infeasible.'
nit: 6 # may vary
slack: array([ 0.79314989, -1.76308532]) # may vary
status: 2
success: False
x: array([ 6.60059391, 3.97366609, -0.52664076, 1.09007993]) # may vary
结果表明问题是不可行的,这意味着不存在满足所有约束条件的解向量。
这并不一定意味着做错。有些问题确实是行不通的。
假设约束太紧了,可以放松。调整代码x1_bounds =(0,6):
x1_bounds = (0, 6)
bounds = [x0_bounds, x1_bounds, x2_bounds, x3_bounds]
result = linprog(c, A_ub=A_ub, b_ub=b_ub, A_eq=A_eq, b_eq=b_eq, bounds=bounds)
print(result)
con: array([9.78840831e-09, 1.04662945e-08]) # may vary
fun: -505.97435889013434 # may vary
message: 'Optimization terminated successfully.'
nit: 4 # may vary
slack: array([ 6.52747190e-10, -2.26730279e-09]) # may vary
status: 0
success: True
x: array([ 9.41025641, 5.17948718, -0.25641026, 1.64102564]) # may vary
x = np.array(result.x)
print(c @ x)
# -505.97435889013434 # may vary
9 指派问题
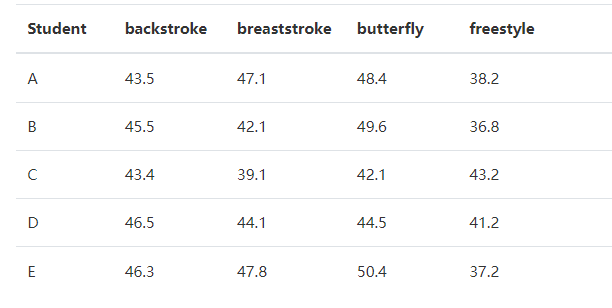
考虑到为游泳混合泳接力队挑选学生的问题。我们有一个表格,列出了五个学生每种泳姿的时间:
解决方案:定义一个成本矩阵C,每行只有一列有值,矩阵和为最终成本
定义目标函数:
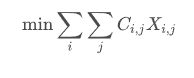
X是一个二值矩阵,当行i被指定到列j时, X i j = 1 X_{ij}=1 Xij=1。
cost = np.array([[43.5, 45.5, 43.4, 46.5, 46.3],
[47.1, 42.1, 39.1, 44.1, 47.8],
[48.4, 49.6, 42.1, 44.5, 50.4],
[38.2, 36.8, 43.2, 41.2, 37.2]])
from scipy.optimize import linear_sum_assignment
row_ind, col_ind = linear_sum_assignment(cost) # 行索引,列索引
row_ind
# array([0, 1, 2, 3])
col_ind
# array([0, 2, 3, 1])
# 最优分配
styles = np.array(["backstroke", "breaststroke", "butterfly", "freestyle"])[row_ind]
students = np.array(["A", "B", "C", "D", "E"])[col_ind]
dict(zip(styles, students))
{'backstroke': 'A', 'breaststroke': 'C', 'butterfly': 'D', 'freestyle': 'B'}
# 最少时间
cost[row_ind, col_ind].sum()
# 163.89999999999998
参考:
https://blog.csdn.net/xu624735206/article/details/117320847
https://blog.csdn.net/jiang425776024/article/details/87885969
https://docs.scipy.org/doc/scipy/tutorial/optimize.html



![[附源码]java毕业设计宿舍管理系统](https://img-blog.csdnimg.cn/6e4f7c7dc8c14d3eb20dc3f898a03a96.png)





![[附源码]java毕业设计研究生管理系统](https://img-blog.csdnimg.cn/83fd3b22199744d78eb2ddd5b51d3396.png)