👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
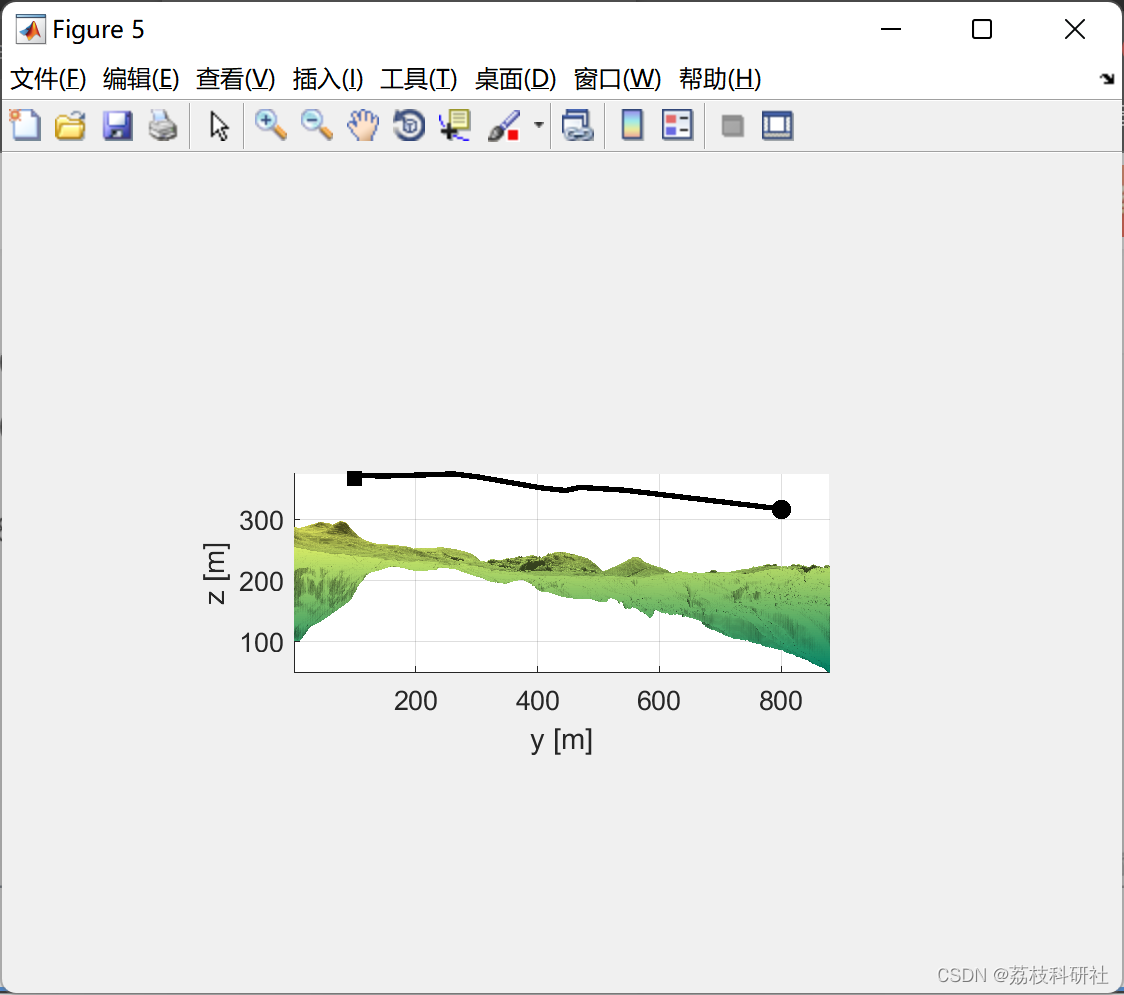
本文基于球向量的粒子群优化(SPSO)算法在无人机路径规划中的实现。目前的实施是用于无人机(UAV)的路径规划。但是,可以对其进行修改以应用于其他优化问题。
文献来源:
Manh Duong Phung, Quang Phuc Ha, "Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization", Journal of Applied soft computing, vol. 107, pp. 107376, 2021.
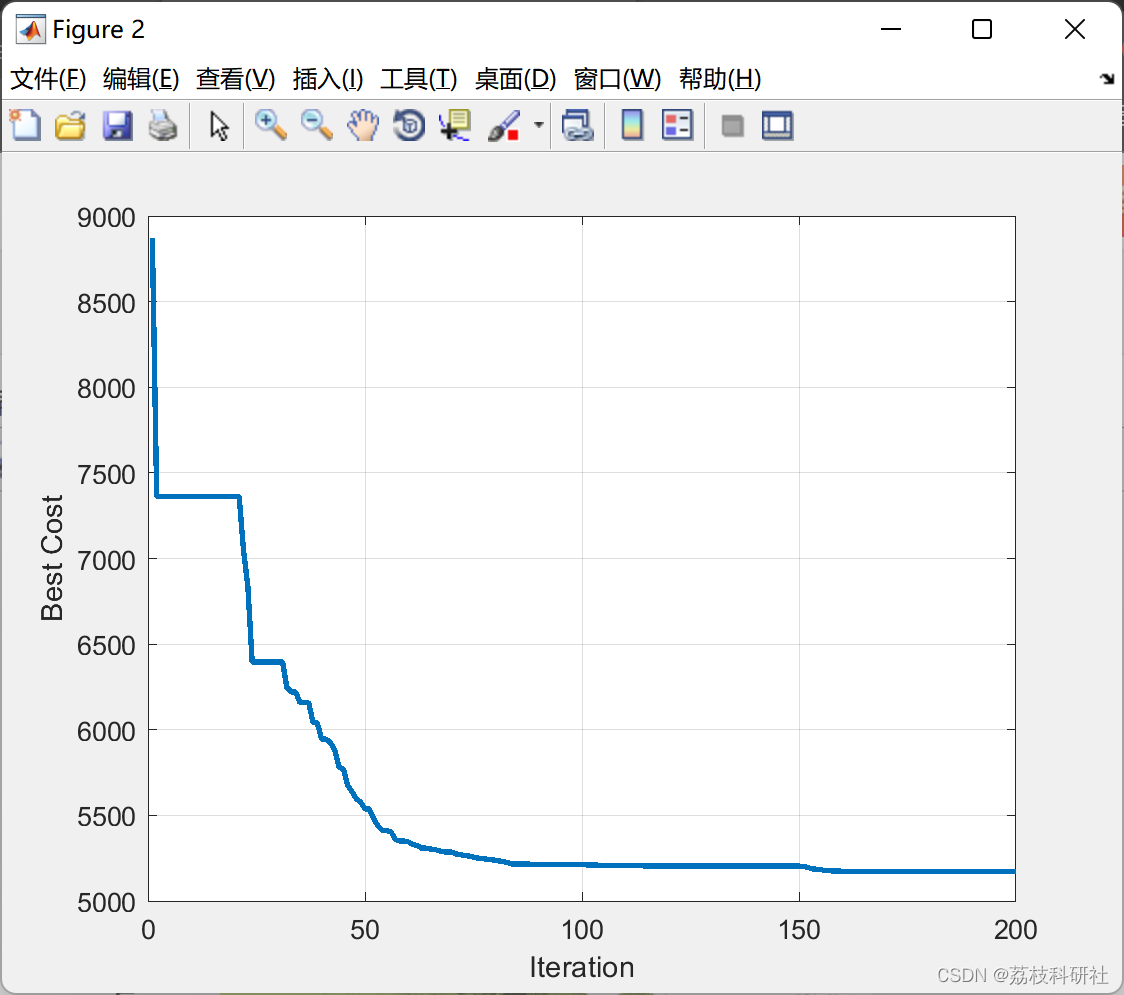
📚2 运行结果


部分代码:
clc;
clear;
close all;
%% Problem Definition
model = CreateModel(); % Create search map and parameters
CostFunction=@(x) MyCost(x,model); % Cost Function
nVar=model.n; % Number of Decision Variables = searching dimension of PSO = number of path nodes
VarSize=[1 nVar]; % Size of Decision Variables Matrix
% Lower and upper Bounds of particles (Variables)
VarMin.x=model.xmin;
VarMax.x=model.xmax;
VarMin.y=model.ymin;
VarMax.y=model.ymax;
VarMin.z=model.zmin;
VarMax.z=model.zmax;
VarMax.r=2*norm(model.start-model.end)/nVar;
VarMin.r=0;
% Inclination (elevation)
AngleRange = pi/4; % Limit the angle range for better solutions
VarMin.psi=-AngleRange;
VarMax.psi=AngleRange;
% Azimuth
% Determine the angle of vector connecting the start and end points
dirVector = model.end - model.start;
phi0 = atan2(dirVector(2),dirVector(1));
VarMin.phi=phi0 - AngleRange;
VarMax.phi=phi0 + AngleRange;
% Lower and upper Bounds of velocity
alpha=0.5;
VelMax.r=alpha*(VarMax.r-VarMin.r);
VelMin.r=-VelMax.r;
VelMax.psi=alpha*(VarMax.psi-VarMin.psi);
VelMin.psi=-VelMax.psi;
VelMax.phi=alpha*(VarMax.phi-VarMin.phi);
VelMin.phi=-VelMax.phi;
%% PSO Parameters
MaxIt=200; % Maximum Number of Iterations
nPop=500; % Population Size (Swarm Size)
w=1; % Inertia Weight
wdamp=0.98; % Inertia Weight Damping Ratio
c1=1.5; % Personal Learning Coefficient
c2=1.5; % Global Learning Coefficient
%% Initialization
% Create Empty Particle Structure
empty_particle.Position=[];
empty_particle.Velocity=[];
empty_particle.Cost=[];
empty_particle.Best.Position=[];
empty_particle.Best.Cost=[];
% Initialize Global Best
GlobalBest.Cost=inf; % Minimization problem
% Create an empty Particles Matrix, each particle is a solution (searching path)
particle=repmat(empty_particle,nPop,1);
% Initialization Loop
isInit = false;
while (~isInit)
disp("Initialising...");
for i=1:nPop
% Initialize Position
particle(i).Position=CreateRandomSolution(VarSize,VarMin,VarMax);
% Initialize Velocity
particle(i).Velocity.r=zeros(VarSize);
particle(i).Velocity.psi=zeros(VarSize);
particle(i).Velocity.phi=zeros(VarSize);
% Evaluation
particle(i).Cost= CostFunction(SphericalToCart(particle(i).Position,model));
% Update Personal Best
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
% Update Global Best
if particle(i).Best.Cost < GlobalBest.Cost
GlobalBest=particle(i).Best;
isInit = true;
end
end
end
% Array to Hold Best Cost Values at Each Iteration
BestCost=zeros(MaxIt,1);
%% PSO Main Loop
for it=1:MaxIt
% Update Best Cost Ever Found
BestCost(it)=GlobalBest.Cost;
for i=1:nPop
% r Part
% Update Velocity
particle(i).Velocity.r = w*particle(i).Velocity.r ...
+ c1*rand(VarSize).*(particle(i).Best.Position.r-particle(i).Position.r) ...
+ c2*rand(VarSize).*(GlobalBest.Position.r-particle(i).Position.r);
% Update Velocity Bounds
particle(i).Velocity.r = max(particle(i).Velocity.r,VelMin.r);
particle(i).Velocity.r = min(particle(i).Velocity.r,VelMax.r);
% Update Position
particle(i).Position.r = particle(i).Position.r + particle(i).Velocity.r;
% Velocity Mirroring
% If a particle moves out of the range, it will moves backward next
% time
OutOfTheRange=(particle(i).Position.r<VarMin.r | particle(i).Position.r>VarMax.r);
particle(i).Velocity.r(OutOfTheRange)=-particle(i).Velocity.r(OutOfTheRange);
% Update Position Bounds
particle(i).Position.r = max(particle(i).Position.r,VarMin.r);
particle(i).Position.r = min(particle(i).Position.r,VarMax.r);
% psi Part
% Update Velocity
particle(i).Velocity.psi = w*particle(i).Velocity.psi ...
+ c1*rand(VarSize).*(particle(i).Best.Position.psi-particle(i).Position.psi) ...
+ c2*rand(VarSize).*(GlobalBest.Position.psi-particle(i).Position.psi);
% Update Velocity Bounds
particle(i).Velocity.psi = max(particle(i).Velocity.psi,VelMin.psi);
particle(i).Velocity.psi = min(particle(i).Velocity.psi,VelMax.psi);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
Manh Duong Phung, Quang Phuc Ha, "Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization", Journal of Applied soft computing, vol. 107, pp. 107376, 2021.Redirecting






![[附源码]java毕业设计校园期刊网络投稿系统](https://img-blog.csdnimg.cn/c3661afa3b7d4fc38869d6a5b16d122e.png)







