真正的大师,永远都怀着一颗学徒的心!
一、项目简介
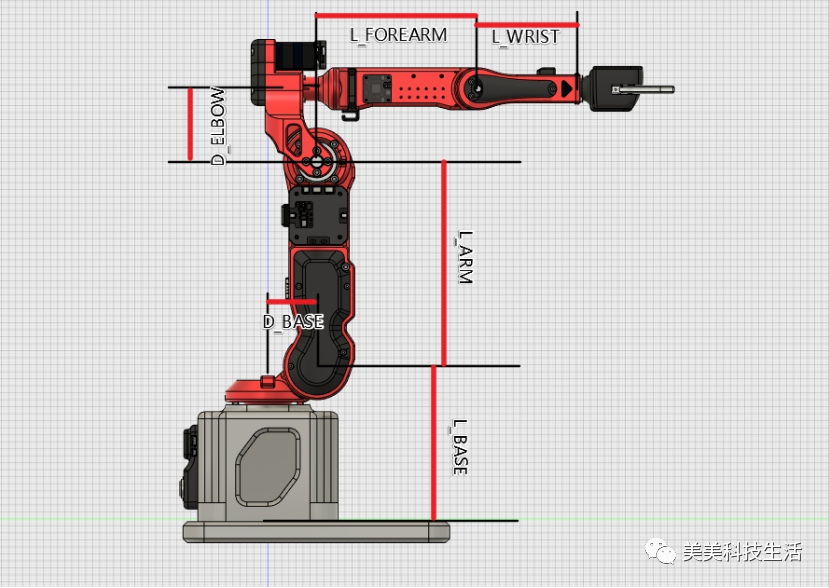
超迷你机械臂机器人,YYDS
核心板:
-
REF核心板
-
REF底板(机械臂底座里面的控制器电路板)
-
步进电机驱动
-
Peak示教器
文件:
-
3D模型设计源文件。
-
20步进电机驱动器硬件工程
-
42/20步进电机驱动的固件源代码
-
命令行调试工具reftool(基于odrivetool框架)
-
便携手提箱的模型文件
-
夹爪硬件设计文件和LED灯环PCB
-
无线空间定位控制器PCB文件
-
无线示教器Peak软硬件工程(作为submodule)
-
REF的硬件设计文件
-
DummyStudio上位机
-
Dummy核心控制器的固件源代码(使用说明见后文)
-
42步进电机驱动器硬件工程
二、实现功能
-
顺序指令
-
实时指令
-
轨迹跟踪
三、技术选型
-
c
四、界面展示



五、源码地址
私信回复:机械臂