ISO14229-1仅规定了应用层的实现,诊断可以基于不同的总线去实施,以基于CAN的UDS最为广泛。本文开始将陆续介绍CAN总线协议的规范与开发。
关联文章:UDS的OSI模型
文章目录
- OSI模型与CAN的关系
- 在各层中CAN定义事项
- CAN总线网络
- ISO11898 和 ISO11519-2 的不同点
- 物理层的主要不同点
- 总结
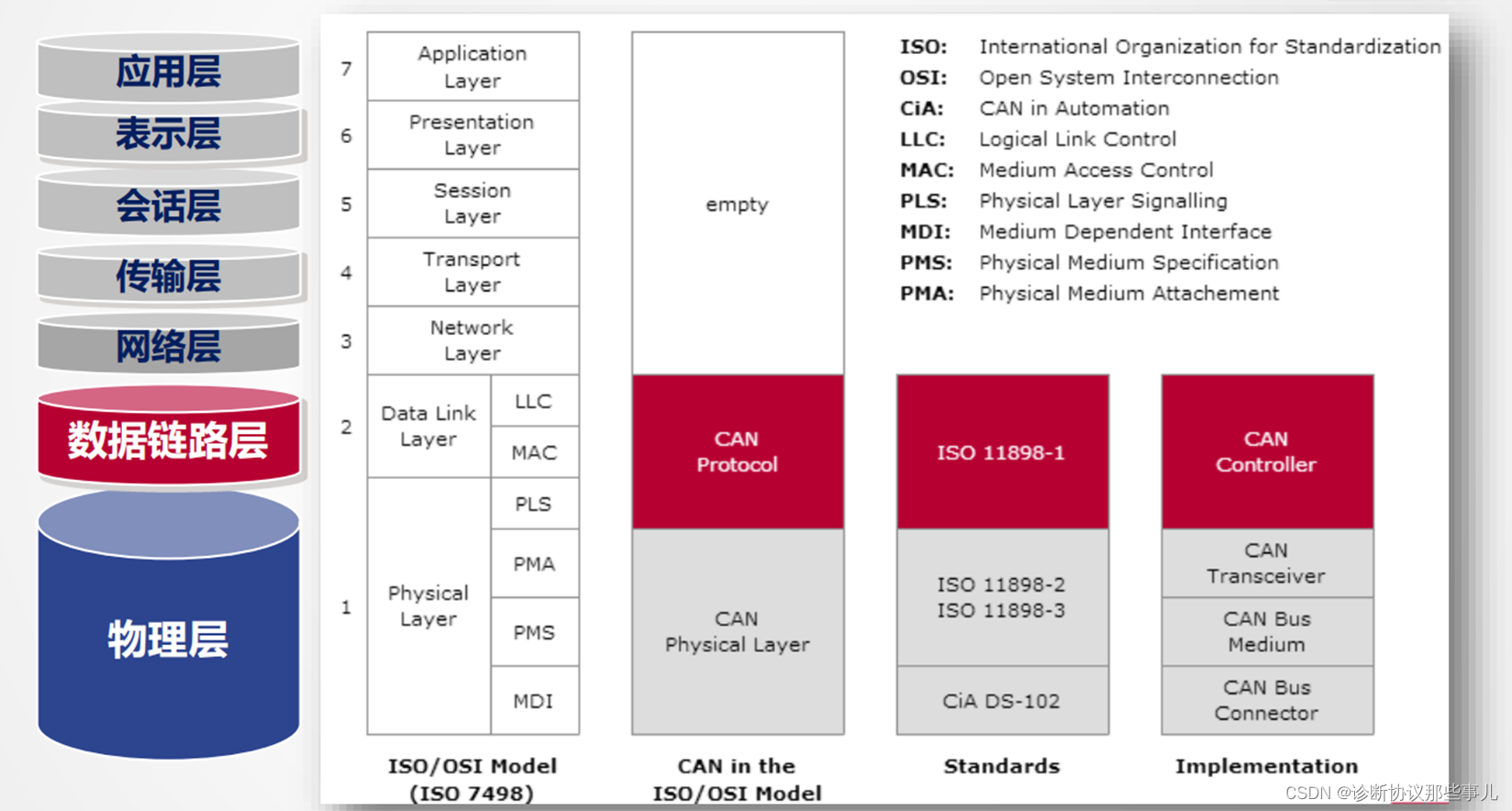
OSI模型与CAN的关系
CAN是控制器局域网:Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信网络。
| ISO/OSI基本参照模型 | 各层定义的主要项目 |
|---|---|
| 7层:应用层 | 由实际应用程序提供可利用的服务 |
| 6层:表示层 | 进行数据表现形式的转换。如:文字设定、数据压缩、加密等的控制 |
| 5层:会话层 | 为建立会话式的通信,控制数据正确地接收和发送 |
| 4层:传输层 | 控制数据传输的顺序、传送错误的恢复等,保证通信的品质。如:错误修正、再传输控制 |
| 3层:网络层 | 进行数据传送的路由选择或中继。如:单元间的数据交换、地址管理 |
| 2层:数据链路层 | 将物理层收到的信号(位序列)组成有意义的数据,提供传输错误控制等数据传输控制流程。如:访问的方法、数据的形式。通信方式、连接控制方式、同步方式、检错方式。应答方式、通信方式、包(帧)的构成。位的调制方式(包括位时序条件) |
| 1层:物理层 | 规定了通信时使用的电缆、连接器等的媒体、电气信号规格等,以实现设备间的信号传送。如:信号电平、收发器、电缆、连接器等的形态 |
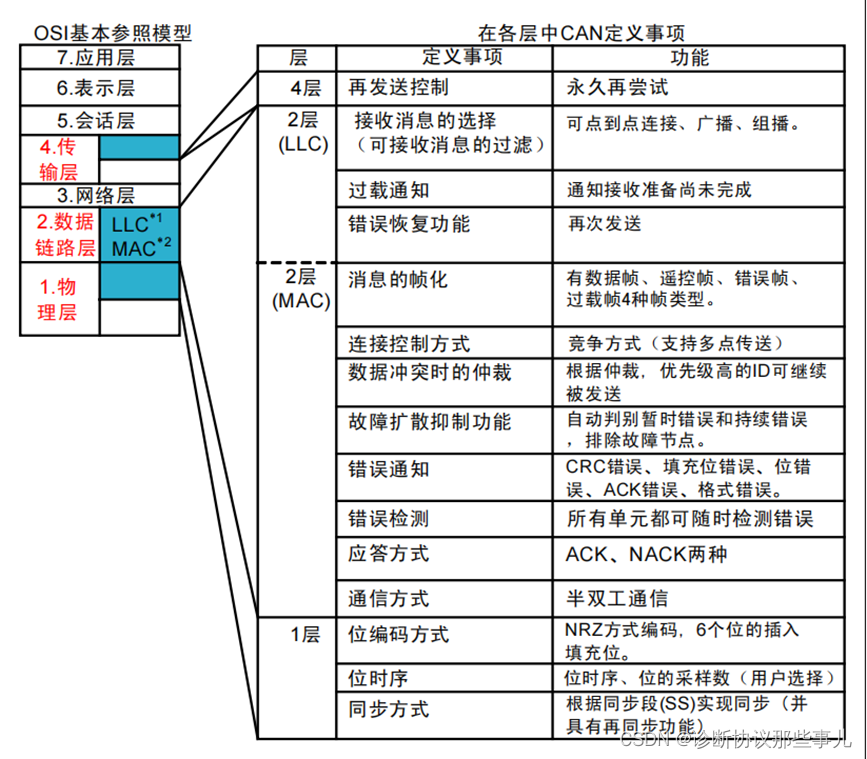
在各层中CAN定义事项
CAN总线网络
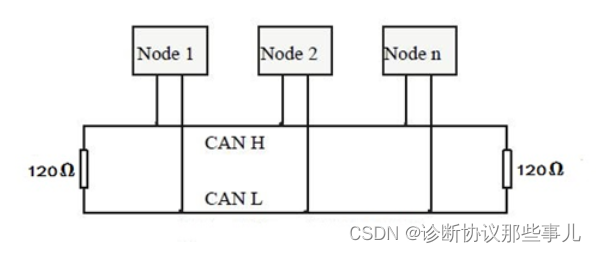
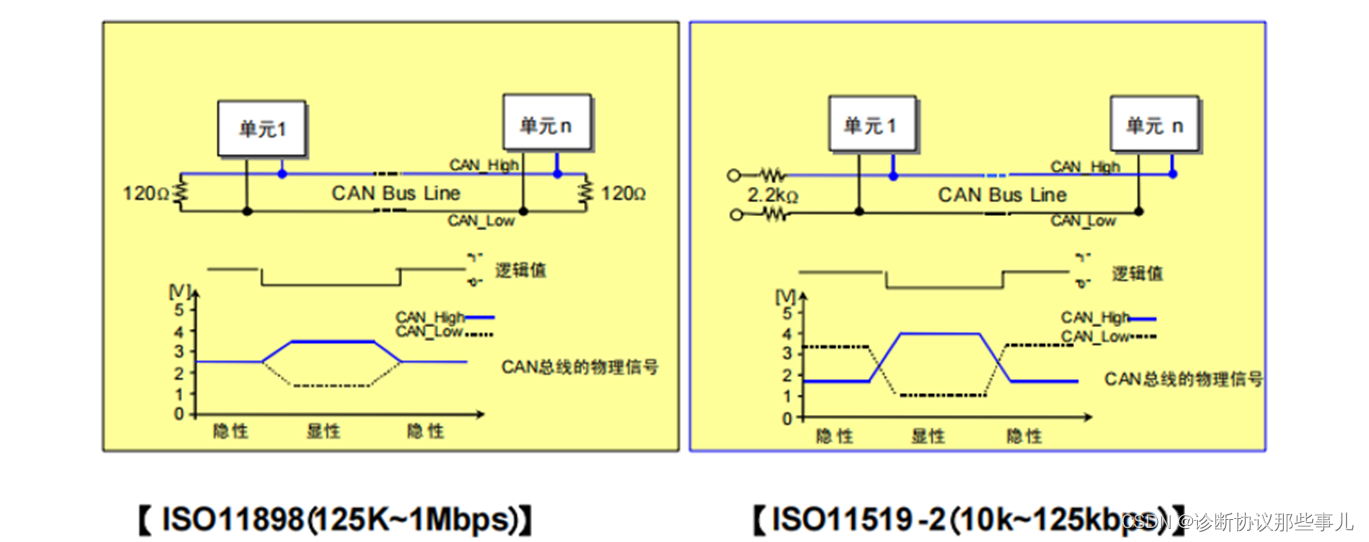
CAN总线网络根据CAN_L和CAN_H上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线。
ISO11898 和 ISO11519-2 的不同点
ISO11898和ISO11519-2,它们之间在数据链路层没什么不同,但是在物理层有些区别。
①ISO 11898-3-2006 道路车辆–控制器局域网络(CAN)-- 第3部分:低速容错专用媒体接口;
②ISO 11519由以下部分组成,总称“道路车辆—低速串行数据通信”:
Part 1:General and definitions 概述和定义
Part 2:Low-speed controller area network (CAN) 低速控制器局域网(CAN)
ISO 11519-2-1994 道路车辆–低速系列数据通信–第二部分:低速控制器区域网络;
Part 3:Part 3: Vehicle area network (VAN) 车辆局域网(VAN)
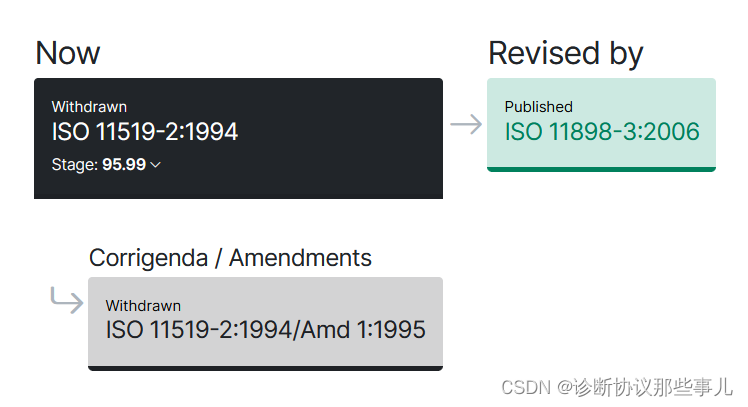
标准ISO 11519-2-1994已经在2006年被ISO 11898-3-2006代替了(参考链接:https://www.iso.org/standard/19470.html),就是说符合标准ISO 11898-3的产品也是支持符合ISO 11519-2标准的产品
ISO11519 是通信速度为 125kbps 以下的 CAN 低速通信标准。
ISO11519-2 是 ISO11519-1 追加新规约后的版本。
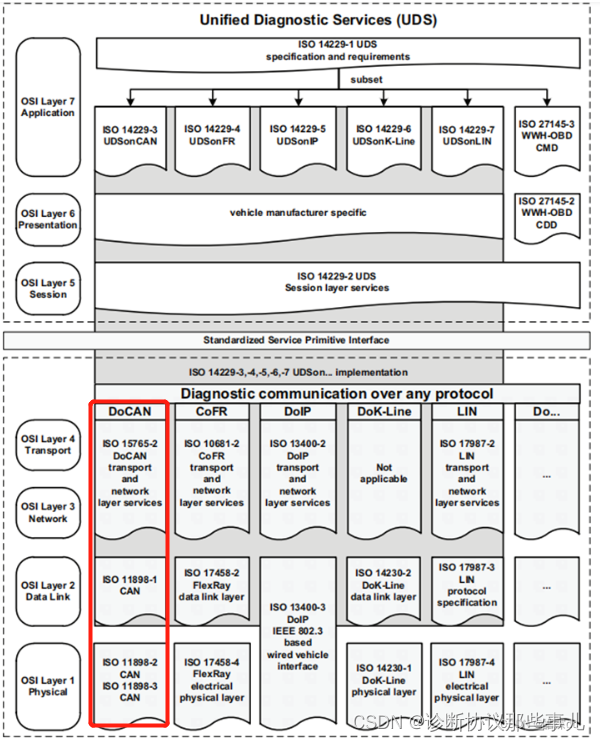
下图表示 CAN 协议和 ISO11898 及 ISO11519-2 标准的范围。
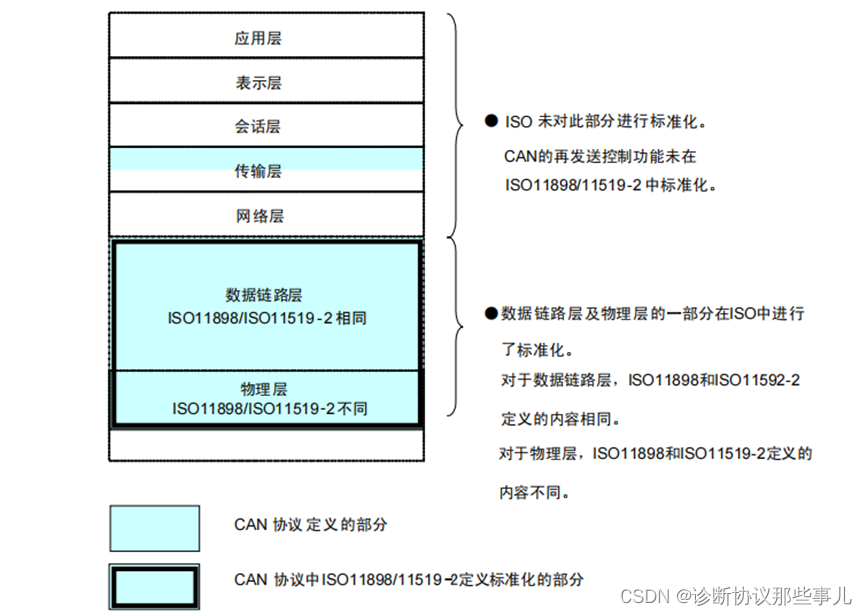
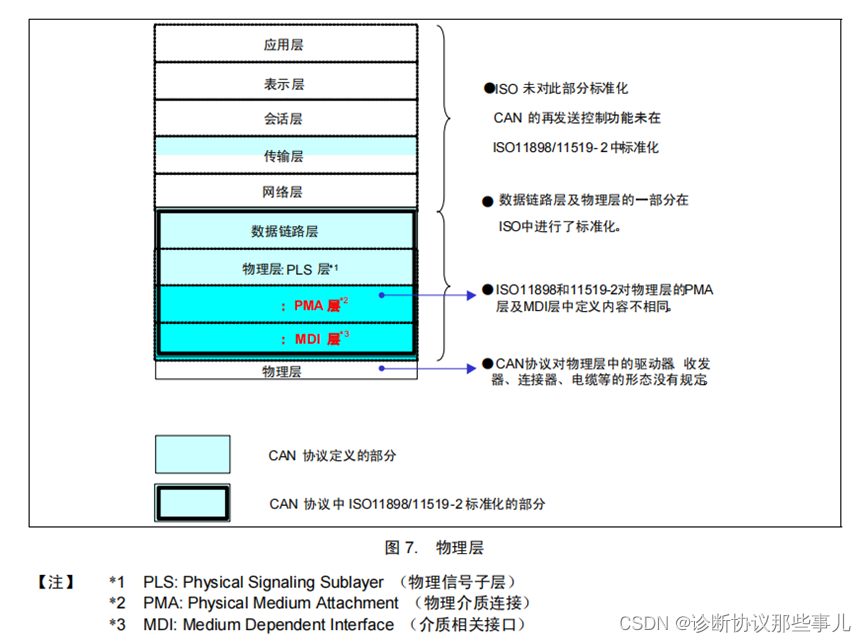
如上图所示, ISO11898 和 ISO11519-2 在 CAN 协议中物理层的标准有所不同。 CAN 协议的物理层如下图所示,定义了三个子层, ISO11898 和 ISO11519-2 在物理层中的 PMA 层和 MDI 层有所不同。
物理层的主要不同点
在物理层(PMA、MDI),主要不同点如下表:
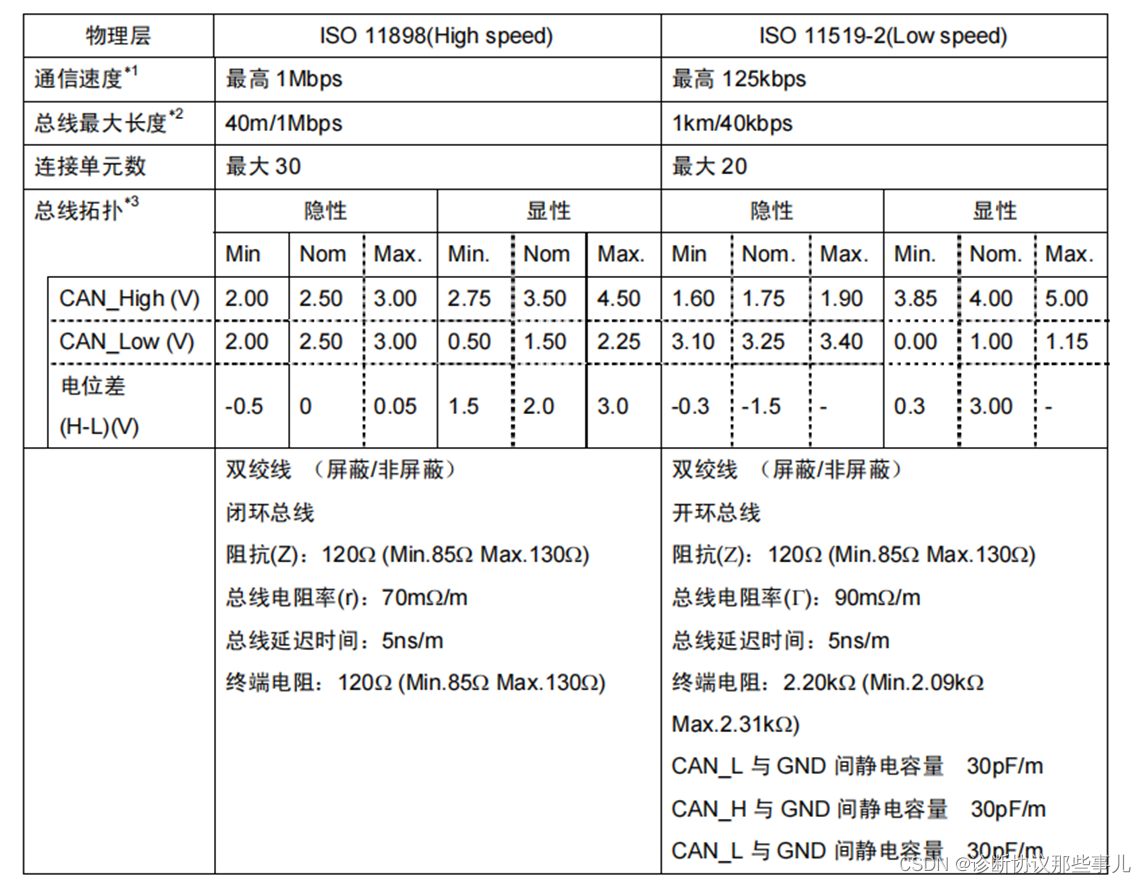
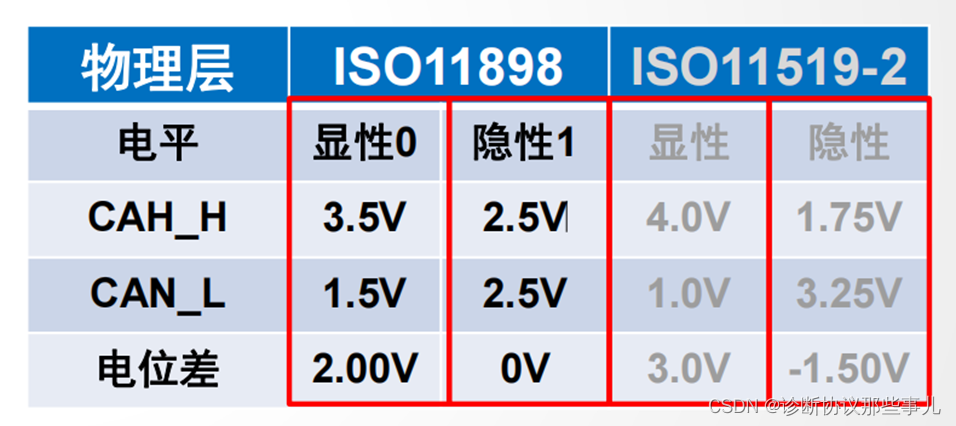
显性电平对应逻辑:0——CAN_H和CAN_L之差为2V左右;
隐性电平对应逻辑:1——CAN_H和CAN_L之差为0V;
显性电平具有优先权,只要有一个单元输出显性电平,总线上即为显性电平。而隐形电平则具有包容的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平。
总结
CAN总线是目前国际上应用最广泛的现场总线之一,欢迎大家对于小编的创造提出宝贵意见,如果觉得有所收获,也请点赞、关注,感谢大家的鼓励。