前言
此前出了目标改进算法专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读最新目标检测算法论文,帮助大家解答疑惑。解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注私信我。
一、摘要
针对YOLOv5算法在应用于光学遥感图像舰船目标检测任务时所面临的小目标误检率、漏检率较高的情况,提出一种基于YOLOv5改进的光学遥感图像舰船目标检测方法。首先对路径聚合网络结构进行改进,设计语义信息增强模块提取更富语义信息的浅层特征,增强对小目标特征的表达能力;然后使用Swish函数作为激活函数,提高网络对数据非线性特征的表征能力,加快模型的收敛速度;最后针对舰船目标的尺寸特点优化检测端结构,移除大目标检测头以减少推理计算量。测试集上的实验表明:该方法相较改进前将检测精度提高了5.2%且推理时间有所减少,在保证检测实时性的同时增强了模型的小目标辨别能力。
二、网络模型及核心创新点
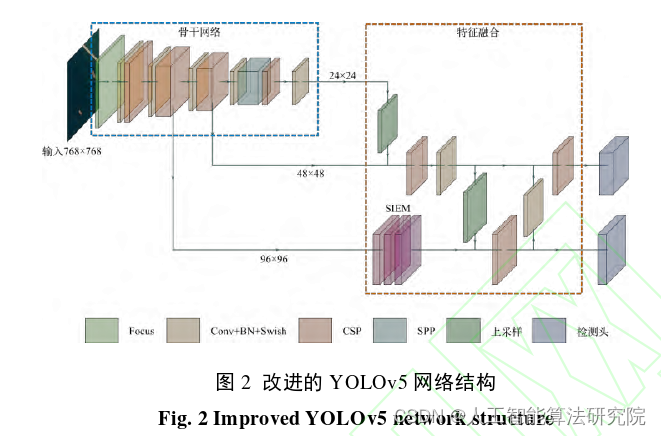
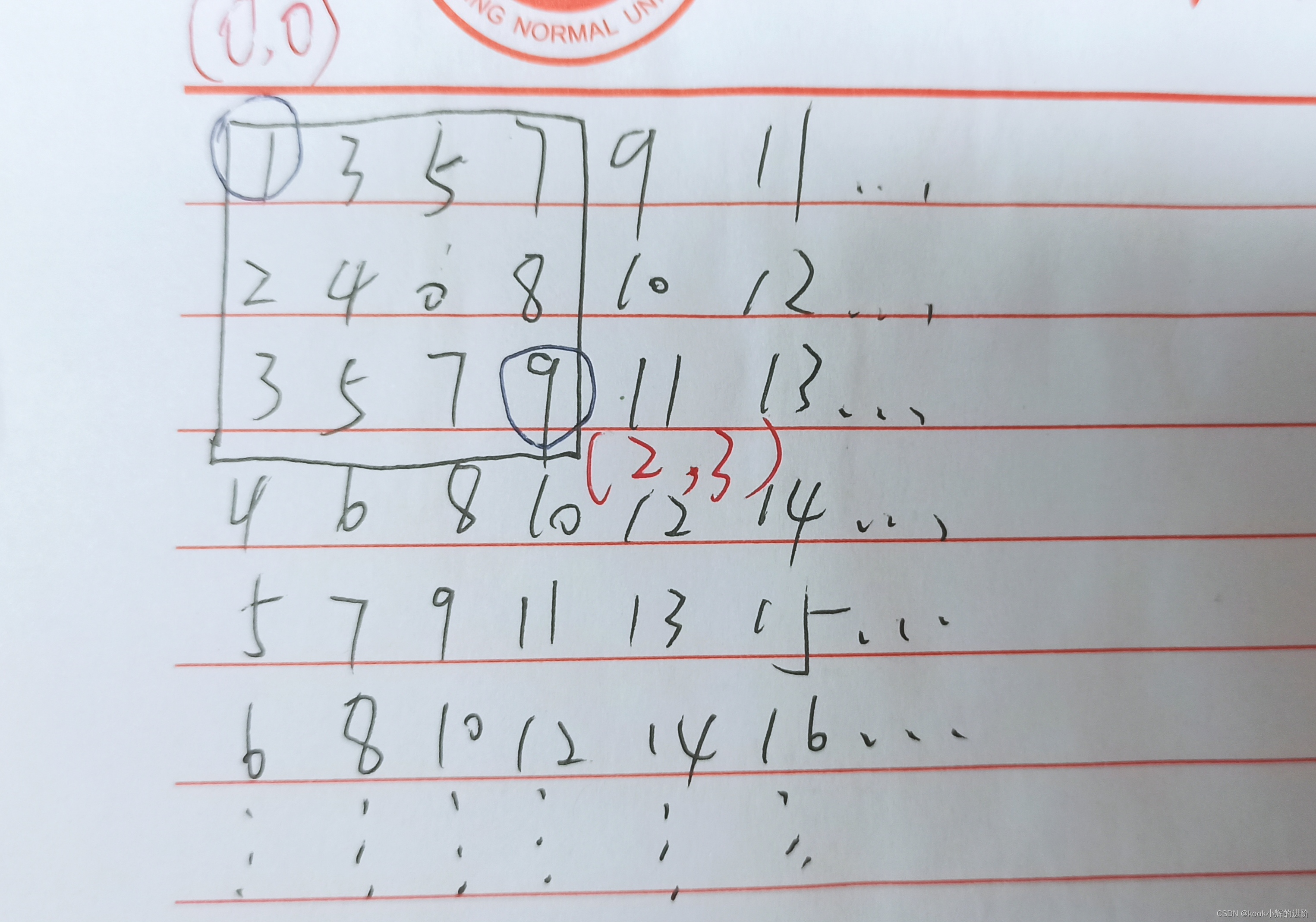
1.语义信息增强模块
2. Swish激活函数
3. 检测端的优化
三、应用数据集
本文实验数据采用Kaggle平台公开的用于舰船检测的遥感图像数据集,数据集中的舰船目标普遍较小且位置分布随机,同时包含有陆地、港口、海面等背景并受到云雾、雨、雪等多种气候干扰。
四、实验效果(部分展示)
1. 为说明改进模型能够提取到更鲁棒的特征,采用Grad-Cam++[30]方法,在模型的检测端对各检测头的特征图进行加权组合,获得含有类别信息的显著图,即类激活图。下图分别绘制了YOLOv5s原始模型检测端以及改进模型检测端的类激活图。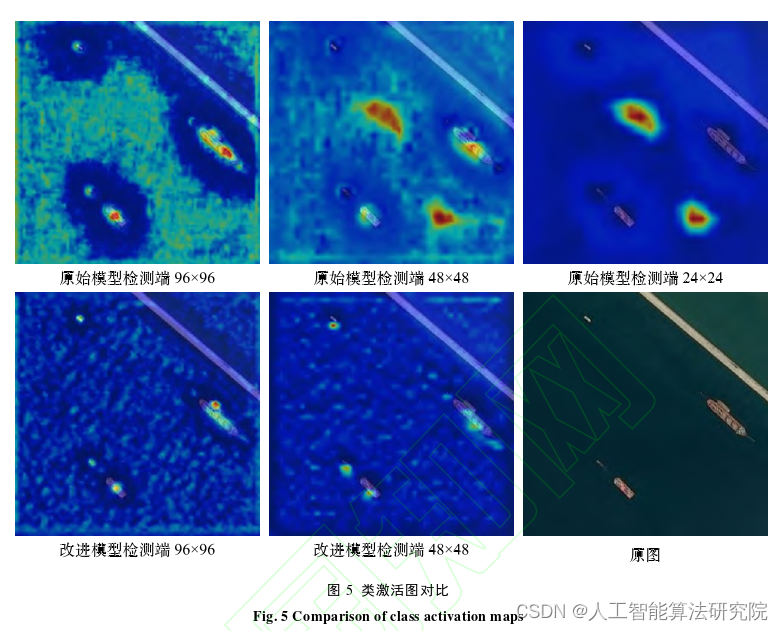
2. 下图展示了改进模型在误检及漏检问题上相较于原始模型的改善,分别选取2张图像说明改进模型在舰船目标大小差异大、目标间位置关系复杂等情况下的检测效果。
五、实验结论
实验表明:改进后的模型在保证实时性的前提下将检测精度AP提高了5.2%,达到了减少小尺寸舰船目标漏检和误检情况的目的。
六、投稿期刊介绍
注:论文原文出自成倩,李佳,杜娟.基于YOLOv5的光学遥感图像舰船目标检测算法[J/OL].系统工程与电子技术.
https://kns.cnki.net/kcms/detail/11.2422.tn.20220712.0940.008.html
解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注下面公众号,私信我。