未来两年,激光雷达市场高速发展的同时,来自市场的需求也逐渐清晰化。
高工智能汽车研究院预测数据显示,预计2025年前装标配激光雷达交付将有望达到200万颗/年的规模。其中,面向私人消费市场的车型,将主要以1颗前向、2颗盲区配置为主,L3/L4的B端前装则主要以1颗前向、4颗盲区配置为主。
其中补盲激光雷达细分市场成为各家必争之地,前后一周时间内,禾赛、速腾、亮道先后披露了旗下纯固态补盲激光雷达产品的量产进度。
今年5月,亮道智能率先推出全国首款Flash纯固态补盲激光雷达LDSatellite,不久前宣布SPAD芯片已经通过AEC-Q100认证,这款产品已进入客户送样阶段,全自动化智能生产线计划在2023年第一季度进入投产验证阶段。
禾赛推出的纯固态补盲激光雷达FT120时就宣布已经拿到多家主机厂定点,预计将于 2023 年下半年开启量产交付。速腾也表示其最新发布的纯固态补盲激光雷达E1的SOP时间预计在2023年下半年。
接下来,面对车企基于功能和场景的方案配置需求,除了硬件性能与适配方案需要满足车规量产条件,激光雷达供应商还需要有能力协助车企实现系统集成与验证、功能开发与落地,并形成数据闭环等等。
纯固态补盲激光雷达上车的挑战
纯固态flash激光雷达能够实现高FOV,通过高度灵敏的接收器实现对环境周围图像的绘制,对近距离场景细小障碍物的探测精确度也具有明显优势,更适合适用于车身近场的感知补盲。
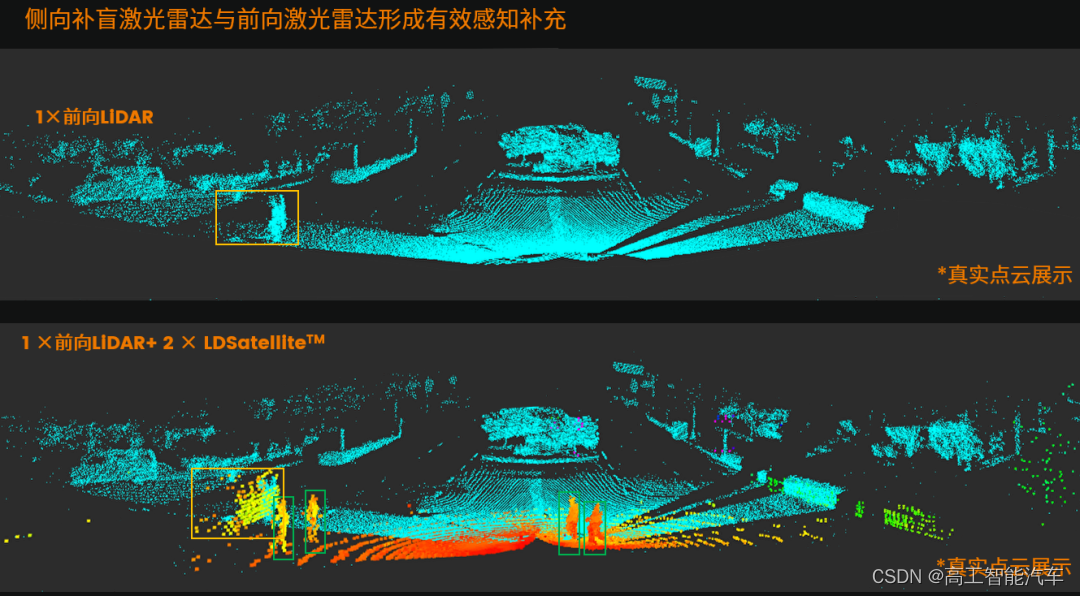 ▲ LDSatellite补盲激光雷达与前向主雷达组合感知
▲ LDSatellite补盲激光雷达与前向主雷达组合感知
此外,这类纯固态激光雷达内部结构采用纯芯片化设计的电子扫描式技术,结构简洁,无任何运动部件,在大幅降低尺寸的同时,具备更高的可靠性与使用寿命,从而更易符合严格的车规要求。
不过目前来看,纯固态补盲激光雷达进入规模量产阶段依旧面临着不少挑战。
纯固态补盲激光雷达硬件同样需要通过系统的车规验证阶段,即使是实现硬件量产交付,同样面临传感器系统验证以及海量系统集成的回归性测试工作。
其中在硬件车规验证阶段,纯固态激光雷达中VCSEL激光发射器和SPAD芯片这两个核心元器件,通过车规元器件产品验证标准,依旧具有较高的门槛与较长的周期。
资料显示,AEC-Q100认证是汽车电子元器件准入必备的车规质量通行证之一,主要针对其可靠性及使用寿命,是适用于车用芯片的综合可靠性测试,也是汽车行业零部件供应商生产的重要指南。
其测试标准与条件极为严苛,需要对产品功能与性能进行加速环境应力测试、加速寿命模拟测试、可靠性测试、密封性测试七大类高达40多项规范测试。
另一方面,要通过AEC-Q100可靠性认证试验条件,需要多轮验证且过程中更多侧重多方协作,因此需要较长的一段周期。
除了以上,在亮道智能CEO剧学铭看来,激光雷达要从产品定义、功能开发与场景需求的核心逻辑上来设计,同时要结合前装量产的条件,而针对补盲的纯固态激光雷达更应该如此。
仅从硬件层面来看,纯固态激光雷达中两大最核心的芯片:SPAD芯片和VCSEL芯片二者间的驱动和控制逻辑非常关键,但传统的SPAD和VCSEL半导体供应商对于车载补盲激光雷达的应用场景以及功能需求逻辑等等并不清晰。
这就需要激光雷达供应商经过长期的探索与实践,来定义一款符合最终产品功能需求芯片的产品,实现车规认证、功能开发、系统验证等完整的验证流程。
还需要同步开发感知软件,并完成软件的系统测试,以确保激光雷达上车的安全性符合车规级要求。补盲激光雷达产品才能更好的配合长距激光雷达形成融合感知方案,实现真正的功能释放。
可以说,补盲激光雷达产品要实现上车量产,除了在性能、尺寸、车规方面满足量产上车的条件,对激光雷达供应商来说,帮助补盲激光雷达快速“上车”的系统集成能力同样重要。
助力补盲激光雷达快速上车
早在2019年,亮道智能便开始接触激光雷达硬件相关技术,其中就包括最前沿的纯固态激光雷达技术。随后在2020年年末,亮道智能正式组建硬件团队,开发纯固态激光雷达。
多年来,亮道智能坚持深耕激光雷达功能开发,同时积极布局自动驾驶与智慧交通领域。打磨出了成熟的智能驾驶感知系统与路侧感知产品,并以此获得了长城汽车、大众集团、宝马集团、梅赛德斯-奔驰等国内和欧洲知名头部车企的项目合作。
也正是基于在车辆感知功能开发的多年积累,其可以领先一步,基于场景与功能的细分需求,推出了全国首款补盲激光雷达产品。
资料显示LDSatellite™拥有120°×75°超大视场角, 高度集成实现了体积纤巧轻量,外露窗口仅48mm×88mm,大小与常见的信用卡尺寸相当。

该产品支持多种集成方案,可根据客户整车开发需求,灵活嵌入车身,前保险杠两侧、左右翼子板、车顶两侧、后保险杠等位置。
为了更好的配合激光雷达上车,亮道智能自研了满足功能安全的激光雷达感知算法,可以高效处理激光雷达点云数据,高精度识别汽车、卡车、货车、自行车和行人等不同类别交通参与者,探测车道线、路牌标识、隧道、高速出入口等静态目标物,提高激光雷达系统感知的可靠性、检测率和准确度。
亮道智能感知算法可横向兼容多种主流激光雷达硬件产品技术,适配不同车企差异化开发需求,实现基于主流算力平台的算法集成。
基于软硬一体化的能力,其可以为客户不同车型功能开发需求,定制软硬一体化激光雷达解决方案。
除了以上, 亮道智能的优势还在于面向车规量产的系统化整体解决方案能力,这不仅包括激光雷达方案的硬件配置与集成,感知算法研发,还有测试验证服务、以及激光雷达系统上车后的数据服务。
目前,亮道智能自有杭州智能工厂全自动化智能产线正在紧锣密鼓地建设,首期产线设计产能50万台/年,全自动化产线计划在2023年进入投产验证。
以上来看,亮道智能这类少数具备全栈式系统解决方案的激光雷达Tier 1,将能更快更好的帮助主机厂更快更好实现功能量产,助力激光雷达产品快速实现大规模化量产。