import ctypes
import os
# 获取当前脚本所在的目录
script_dir = os.path.dirname(os.path.abspath(__file__))
# 构建库文件的相对路径
lib_relative_path = os.path.join('dynamic_models', 'UR5e', 'Jb.so')
# 拼接成完整的路径
lib_path = os.path.join(script_dir, lib_relative_path)
try:
fun_grav = ctypes.CDLL(lib_path)
print("库文件加载成功!")
except OSError as e:
print(f"加载库文件时出错: {e}")<mujoco model="ur5">
<compiler angle="radian" meshdir="ur5/collision/" />
<size njmax="500" nconmax="100" />
<asset>
<mesh name="base" file="base.stl" />
<mesh name="shoulder" file="shoulder.stl" />
<mesh name="upperarm" file="upperarm.stl" />
<mesh name="forearm" file="forearm.stl" />
<mesh name="wrist1" file="wrist1.stl" />
<mesh name="wrist2" file="wrist2.stl" />
<mesh name="wrist3" file="wrist3.stl" />
</asset>
<worldbody>
<geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="base" />
<geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="base" />
<body name="shoulder_link" pos="0 0 0.089159">
<inertial pos="0 0 0" mass="3.7" diaginertia="0.0102675 0.0102675 0.00666" />
<joint name="shoulder_pan_joint" pos="0 0 0" axis="0 0 1" limited="true" range="-3.14159 3.14159" />
<geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="shoulder" />
<geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="shoulder" />
<body name="upper_arm_link" pos="0 0.13585 0" quat="0.707107 0 0.707107 0">
<inertial pos="0 0 0.28" mass="8.393" diaginertia="0.226891 0.226891 0.0151074" />
<joint name="shoulder_lift_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" />
<geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="upperarm" />
<geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="upperarm" />
<body name="forearm_link" pos="0 -0.1197 0.425">
<inertial pos="0 0 0.196125" mass="2.275" diaginertia="0.0312168 0.0312168 0.004095" />
<joint name="elbow_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" />
<geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="forearm" />
<geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="forearm" />
<body name="wrist_1_link" pos="0 0 0.39225" quat="0.707107 0 0.707107 0">
<inertial pos="0 0.093 0" mass="1.219" diaginertia="0.0025599 0.0025599 0.0021942" />
<joint name="wrist_1_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" />
<geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="wrist1" />
<geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="wrist1" />
<body name="wrist_2_link" pos="0 0.093 0">
<inertial pos="0 0 0.09465" mass="1.219" diaginertia="0.0025599 0.0025599 0.0021942" />
<joint name="wrist_2_joint" pos="0 0 0" axis="0 0 1" limited="true" range="-3.14159 3.14159" />
<geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="wrist2" />
<geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="wrist2" />
<body name="wrist_3_link" pos="0 0 0.09465">
<inertial pos="0 0.06505 0" quat="1.73123e-12 0.707107 -0.707107 1.73123e-12" mass="0.1879" diaginertia="0.000132117 8.46959e-05 8.46959e-05" />
<joint name="wrist_3_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" />
<geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="wrist3" />
<geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="wrist3" />
<site name="ee" pos="0 0 0" rgba="1 0 0 1" size="0.01" type="sphere"/>
</body>
</body>
</body>
</body>
</body>
</body>
</worldbody>
<actuator>
<motor name='motor1' ctrllimited="true" ctrlrange="-100 100" joint='shoulder_pan_joint' gear="1"/>
<motor name='motor2' ctrllimited="true" ctrlrange="-100 100" joint='shoulder_lift_joint' gear="1"/>
<motor name='motor3' ctrllimited="true" ctrlrange="-100 100" joint='elbow_joint' gear="1"/>
<motor name='motor4' ctrllimited="true" ctrlrange="-100 100" joint='wrist_1_joint' gear="1"/>
<motor name='motor5' ctrllimited="true" ctrlrange="-100 100" joint='wrist_2_joint' gear="1"/>
<motor name='motor6' ctrllimited="true" ctrlrange="-100 100" joint='wrist_3_joint' gear="1"/>
</actuator>
</mujoco>雅克比
from dm_control.mujoco.wrapper import mjbindings
import numpy as np
mjlib = mjbindings.mjlib
def get_site_jac(model, data, site_id):
"""Return the Jacobian' translational component of the end-effector of
the corresponding site id.
"""
jacp = np.zeros((3, model.nv))
jacr = np.zeros((3, model.nv))
mjlib.mj_jacSite(model, data, jacp, jacr, site_id)
jac = np.vstack([jacp, jacr])
return jac
def get_fullM(model, data):
M = np.zeros((model.nv, model.nv))
mjlib.mj_fullM(model, M, data.qM)
return M任务空间惯量矩阵
def task_space_inertia_matrix(M, J, threshold=1e-3):
"""Generate the task-space inertia matrix
Parameters
----------
M: np.array
the generalized coordinates inertia matrix
J: np.array
the task space Jacobian
threshold: scalar, optional (Default: 1e-3)
singular value threshold, if the detminant of Mx_inv is less than
this value then Mx is calculated using the pseudo-inverse function
and all singular values < threshold * .1 are set = 0
"""
# calculate the inertia matrix in task space
M_inv = np.linalg.inv(M)
Mx_inv = np.dot(J, np.dot(M_inv, J.T))
if abs(np.linalg.det(Mx_inv)) >= threshold:
# do the linalg inverse if matrix is non-singular
# because it's faster and more accurate
Mx = np.linalg.inv(Mx_inv)
else:
# using the rcond to set singular values < thresh to 0
# singular values < (rcond * max(singular_values)) set to 0
Mx = np.linalg.pinv(Mx_inv, rcond=threshold * 0.1)
return Mx, M_invdef set_state(model, data, qpos, qvel):
assert qpos.shape == (model.nq, ) and qvel.shape == (model.nv, )
# old_state = data.get_state()
# new_state = mujoco.MjSimState(old_state.time, qpos, qvel, old_state.act,
# old_state.udd_state)
# data.set_state(new_state)
# model.forward()
data.qpos[:] = qpos
data.qvel[:] = qvel
def get_contact_force(mj_model, mj_data, body_name):
bodyId = mujoco.mj_name2id(mj_model, MJ_BODY_OBJ, body_name)
force_com = mj_data.cfrc_ext[bodyId, :]
trn_force = force_com.copy()
return np.hstack((trn_force[3:], trn_force[:3]))
def get_geom_pose(model, geom_name):
"""Return the geom pose (relative to parent body).
:param mujoco_py.MjModel model:
:param str geom_name:
:return: position, quaternion
:rtype: tuple(np.array(3), np.array(4))
"""
geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)
pos = model.geom_pos[geom_id, :]
quat = model.geom_quat[geom_id, :]
return pos, quat
def get_geom_size(model, geom_name):
"""Return the geom size.
:param mujoco_py.MjModel model:
:param str geom_name:
:return: (radius, half-length, _) for cylinder geom, and
(X half-size; Y half-size; Z half-size) for box geom
:rtype: np.array(3)
"""
geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)
if model.geom_type[geom_id] == MJ_BOX or model.geom_type[
geom_id] == MJ_CYLINDER:
return model.geom_size[geom_id, :]
else:
return None
def get_geom_friction(model, geom_name):
geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)
return model.geom_friction[geom_id, :]
def get_body_mass(model, body_name):
body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)
return model.body_mass[body_id]
def get_body_pose(model, body_name):
body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)
return model.body_pos[body_id], model.body_quat[body_id]
def get_mesh_vertex_pos(model, geom_name):
geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)
assert model.geom_type[geom_id] == MJ_MESH
mesh_id = model.geom_dataid[geom_id]
first_vertex_id = model.mesh_vertadr[mesh_id]
no_vertex = model.mesh_vertnum[mesh_id]
vertex_pos = model.mesh_vert[first_vertex_id:first_vertex_id + no_vertex]
return vertex_pos
def set_geom_size(model, geom_name, size):
geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)
model.geom_size[geom_id, :] = size
def set_body_mass(model, body_name, mass):
body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)
model.body_mass[body_id] = mass
def set_geom_friction(model, geom_name, friction):
geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)
model.geom_friction[geom_id, :] = friction
def set_body_pose(model, body_name, pos, quat):
body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)
model.body_pos[body_id, :] = pos
model.body_quat[body_id, :] = quat
def set_body_pose_rotm(model, body_name, pos, R):
quat = mat2quat(R)
body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)
model.body_pos[body_id, :] = pos
model.body_quat[body_id, :] = quat
# -------- GEOMETRY TOOLs
def quat_error(q1, q2):
"""Compute the rotation vector (expressed in the base frame), that if follow
in a unit time, will transform a body with orientation `q1` to
orientation `q2`
:param list/np.ndarray q1: Description of parameter `q1`.
:param list/np.ndarray q2: Description of parameter `q2`.
:return: a 3D rotation vector
:rtype: np.ndarray
"""
if isinstance(q1, list):
q1 = np.array(q1)
if isinstance(q2, list):
q2 = np.array(q2)
dtype = q1.dtype
neg_q1 = np.zeros(4, dtype=dtype)
err_rot_quat = np.zeros(4, dtype=dtype)
err_rot = np.zeros(3, dtype=dtype)
if q1.dot(q2) < 0:
q1 = -q1
mujoco.mju_negQuat(neg_q1, q1)
mujoco.mju_mulQuat(err_rot_quat, q2, neg_q1)
mujoco.mju_quat2Vel(err_rot, err_rot_quat, 1)
return err_rot
def quat2mat(q):
"""Tranform a quaternion to rotation amtrix.
:param type q: Description of parameter `q`.
:return: 3x3 rotation matrix
:rtype: np.array
"""
mat = np.zeros(9)
mujoco.mju_quat2Mat(mat, q)
return mat.reshape((3, 3))
def pose_transform(p1, q1, p21, q21):
"""Coordinate transformation between 2 frames
:param np.ndarray p1: position in frame 1
:param np.ndarray q1: orientation (quaternion) in frame 1
:param np.ndarray p21: relative position between frame 1 and 2
:param np.ndarray q21: relative orientation between frame 1 and 2
:return: position and orientation in frame 2
:rtype: type
"""
# quat to rotation matrix
R21 = quat2mat(q21)
p2 = p21 + R21.dot(p1)
q2 = np.zeros_like(q1)
mujoco.mju_mulQuat(q2, q21, q1) # q2 = q21*q1
return p2, q2
def integrate_quat(q, r, dt):
"""Integrate quaternion by a fixed angular velocity over the duration dt.
:param np.array(4) q: quaternion.
:param np.array(3) r: angular velocity.
:param float dt: duration.
:return: result quaternion.
:rtype: np.array(4)
"""
qres = np.zeros(4)
qe = np.zeros(4)
r = r * dt
angle = np.linalg.norm(r)
if angle < 1e-9:
# if angle too small then return current q
return q.copy()
axis = r / angle
mujoco.mju_axisAngle2Quat(qe, axis, angle)
mujoco.mju_mulQuat(qres, qe, q)
return qres
def transform_spatial(v1, q21):
"""Coordinate transformation of a spatial vector. The spatial vector can be either
twist (linear + angular velocity) or wrench (force + torque)
:param type v1: Spatial vector in frame 1
:param type q21: transformation matrix (in terms of quaternion)
:return: Description of returned object.
:rtype: type
"""
R21 = quat2mat(q21)
R = np.block([[R21, np.zeros((3, 3))], [np.zeros((3, 3)), R21]])
return R.dot(v1)
def similarity_transform(A1, q21):
"""Similarity transformation of a matrix from frame 1 to frame 2
A2 = R21 * A1 * R12
:param np.array((3, 3)) A1: 3x3 matrix.
:param np.array(4) q21: quaternion representation.
:return: 3x3 matrix
:rtype: np.array
"""
R21 = quat2mat(q21)
return R21.dot(A1.dot(R21.T))
# NOTE: there are infinite rotation vector solutions for a particular
# orientation, the `ref` is to find the closest solution to a reference.
# Is there another minimal representation that could avoid this?
def quat2vec(q, ref=None):
"""Transform quaternion representation to rotation vector representation"""
r = np.zeros(3)
scale = 1
mujoco.mju_quat2Vel(r, q, scale)
if ref is not None:
if r.dot(ref) < 0:
angle = np.linalg.norm(r)
r = r / angle
angle = angle - 2 * np.pi
r = r * angle
return r
def inverse_frame(p, q):
pi, qi = np.zeros(3), np.zeros(4)
mujoco.mju_negPose(pi, qi, p, q)
return pi, qi
def mat2quat(R):
R = R.flatten()
q = np.zeros(4)
mujoco.mju_mat2Quat(q, R)
return q
def mul_quat(q1, q2):
q = np.zeros(4)
mujoco.mju_mulQuat(q, q1, q2)
return q
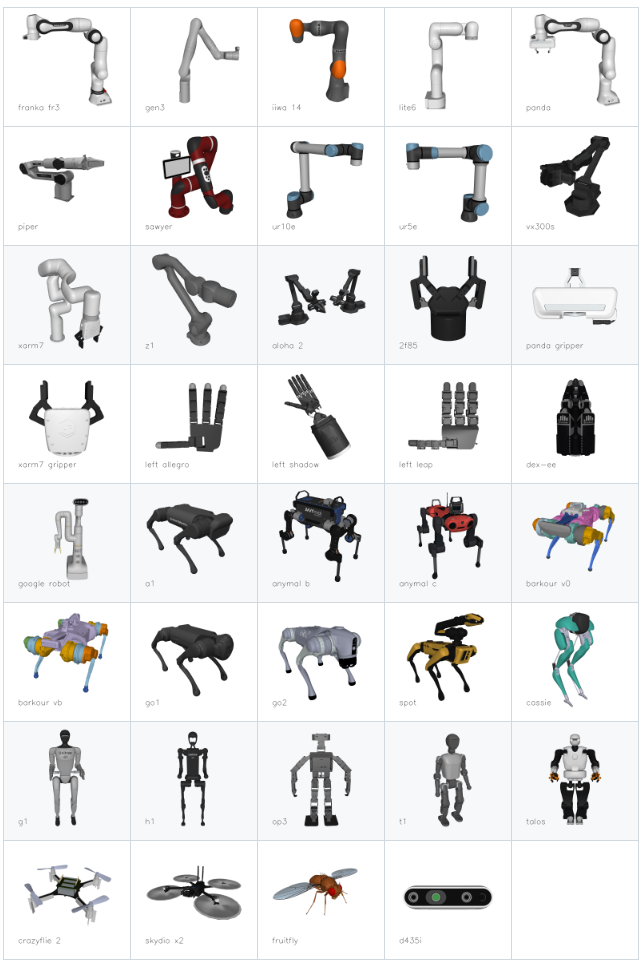
https://github.com/google-deepmind/mujoco_menagerie![]() https://github.com/google-deepmind/mujoco_menagerie
https://github.com/google-deepmind/mujoco_menagerie
https://github.com/ARISE-Initiative/robosuite![]() https://github.com/ARISE-Initiative/robosuite
https://github.com/ARISE-Initiative/robosuite