越来越多的同学们发现北斗三代信号的B1C,B2a信号居然和美国GPS L1,L5处在同样频率上? 为什么美国会允许这样的事情发生?同频率难道不干扰彼此的信号吗?
思博伦卫星导航技术支持文章TED
这事得从2006年联合国成立全球卫星导航系统国际委员会(ICG)说起,这个委员会成立目的就是协调各卫星导航系统的兼容性和互通性促进合作发展。北斗基于该平台积极与各GNSS系统开展合作。因为频率资源有限,国际电联(ITU)规定了卫星导航只能有限的使用在L band内的频率,且先到先得, 北斗相较于GPS 和GLONASS起步较晚,所剩的频段有限。在全球卫星导航系统国际委员会和国际电信联盟的框架下,北斗卫星导航系统实现和全球各GNSS系统的兼容与互操作,让全世界的用户共享来自中国的北斗卫星导航系统技术。
正如中国卫星导航系统管理办公室主任、北斗卫星导航系统发言人冉承其表示:对普通用户来说,在不太增加成本或者基本不增加成本的情况下,可以同时使用北斗和GPS两个卫星导航系统。通过双方系统兼容与互操作合作,不仅解决了干扰问题,还带来更好的应用,实现了“1+1>2”的效果,系统间实现了双赢,广大用户实现了多赢。

我们结合北斗自身实际发展提出兼容(Compatibility)与互操作(Interoperability)的内涵: 兼容是指独立或联合使用多个全球和区域卫星导航系统及其增强系统工作时,不给单个系统的导航服务带来不可接受的影响(有害干扰),彼此间互不干扰;互操作,是指通过使用多个全球和区域卫星导航/增强系统及其开放服务,能在用户层面比单独依赖单个系统的开放信号获得更好的能力,且不显著增加接收机的成本和设计复杂性。兼容是互操作的前提是为保证自主知识产权,开放信号的互操作可以在有各自独特设计的基础上,实现频谱的相似性,同时实现星座互补、时间互操作、坐标相互转换,为用户提供更好的服务。
2017年中国卫星导航系统管理办公室与美国国务院空间和先进技术办公室签署了《北斗与GPS 信号兼容与互操作联合声明》,经过中美代表和专家们三年以来的努力,在民用服务与应用进行广泛讨论研究,终于解决了兼容和互操作技术层面的问题。
图来源:《北斗与GPS信号兼容与互操作联合声明》
B1C是北斗三号最主要的公开服务信号,公开面向全球服务,兼容和互操作体现在B1C信号与GPS L1C , Galileo E1 OS共享频率。
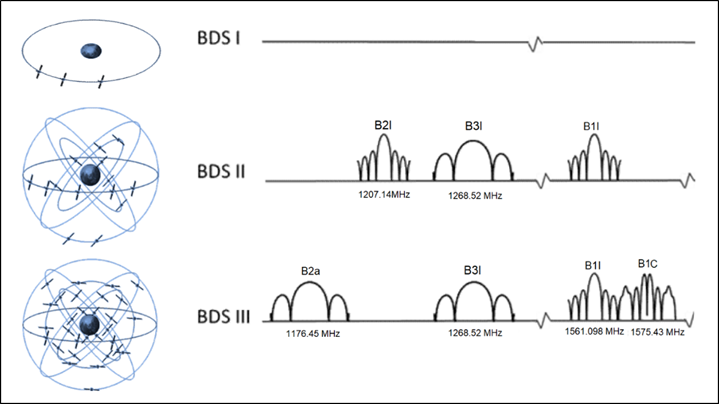
根据北斗官方ICD文件《北斗卫星导航系统空间信号接口控制文件公开服务信号B1C 1.0版》可知, B1C信号以载波1575.42MHz为中心的32.736MHz带宽内信号。B1C只在北斗三号中圆地球轨道(MEO)卫星和倾斜地球同步轨道(IGSO)卫星上播发,地球静止轨道(GEO)卫星不播发B1C信号。
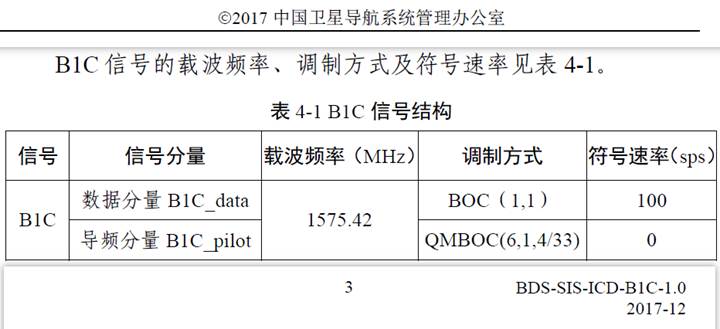
通常情况下,I 与Q信号通道上调制则不同的伪码,对于承载的数据可以相同或者不同甚至一个有,另一个没有任何数据。 调制着数据的信号我们通常称为数据分量Data,没有调制数据的称为导频分量Pilot。 这种设计是GNSS信号普遍的趋势,因为导频信号上无数据,接收机不必考虑使用由数据比特跳变引起的180度载波相变不敏感的Costas锁相环 ,而采用纯锁相环PLL形式降低成本。 且无数据比特跳变则接收机在破获和跟踪是可以采用更长的相干积分时间,提高信号捕获和跟踪灵敏度。
B1C信号和GPS信号能共存共用互不干扰,在技术上原因之一是GPS 采用的码分多址CDMA技术,该技术能使卫星在相同频率传播信号的同时,又不会有相互干扰,同时也允许了接收机同时观测4颗及以上多颗卫星进行同步测距。另外,它们还采用了不同的调制方式来规避相互之间的干扰。 B1C采用的是BOC调制,而GPS采用的是BPSK调制。

从图中可以看出GPS信号BPSK调制位于频谱主瓣的中心零频处,而BOC调制信号频谱偏移至零频左右两侧。这就实现了两个系统共用中心频点的同时,频谱上分离减少干扰。
B1C信号使用的QMBOC(正交复用二进制偏移载波)调制方式则为我国拥有自主知识产权的技术,做到了自主可控,自主创新。QMBOC(6,1,4/44)复合载波由相互正交的BOC(1,1)子载波和BOC(6,1)子载波组合构成,两个分量功率比29:4,将原来的频谱二次搬移到中心频率的两侧去。使得在同一个频点条件下,多个信号灵活地共享频谱。同时规避了其他技术的相关专利,满足了在相同频点上其他信号的射频兼容性技术问题,保证了与GPS L1C和Galileo E1 OS信号有较好的兼容性和互操作性。
目前,思博伦的GSS7000和GSS9000模拟器已经能够提供北斗第三阶段(BDS III)的信号:根据官方ICD文档,思博伦已经实施了B1I、B2I、B1C、B2a 、B2b和B3I
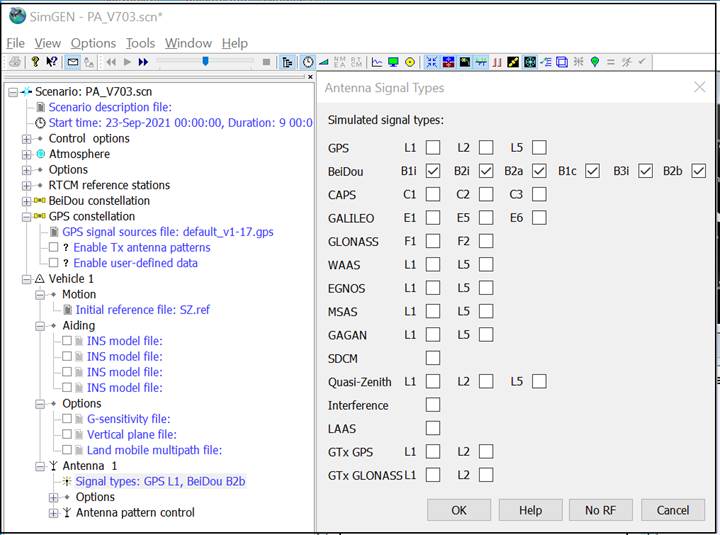
通过在思博伦模拟器上使用全新的BD III信号进行测试,您可以在系统完全投入实际运营之间确保自己的设备/系统能够正常运行,还可以在未来使用健壮性方法继续对其进行测试,同时思博伦也承诺会在新版SIS-ICD修订出现时持续提供校验和更新。
关键词:BDS,GPS,B1I,B2I,B3I,B1C,B2a,B2b,北斗,兼容互操作,BPSK,BOC,










![[OS] vDSO + vvar(频繁调用的处理) | 存储:寄存器(高效)和栈(空间大)| ELF标准包装规范(加速程序加载)](https://i-blog.csdnimg.cn/img_convert/5e9339cb8d1041c1072eb4b1b3906960.png)
