串口通信-Hal库实现不定长度收发,DMA+USART
- DMA
- 串口
- STM32CUBEMX配置(工程创建)
- 基础配置
- 时钟配置
- 工程配置
- 代码编写
- 现象
DMA
在正式配置之前,我们先来一起简单了解一下DMA。
DMA(Direct Memory Access,直接内存访问)是一种用于处理器和外设之间传输数据的技术,通过DMA,外设可以直接访问内存中的数据,而不需要处理器的干预,从而提高数据传输的效率。
举个例子:
我是元始天尊,我把灵珠给太乙真人,然后通过太乙真人把灵珠给殷夫人,这是常规情况的数据传输,太乙真人就是CPU,灵珠就是数据,这样做会占用太乙真人的精力(消耗CPU的资源)。
然而实际上,太乙真人在这中间仅仅只是充当了一个大自然的搬运工,这样太大材小用了,像太乙真人这样的十二金仙,有捍卫人间正道,斩妖除魔的大事儿要处理,哪儿能天天当快递员呀。
于是,伟大的元始天尊(也就是我),想了一个办法,我直接用法术,把灵珠传送到殷夫人肚子里面,这就是DMA了。灵珠就是数据,法术就相当于是DMA通道,这样不但太乙真人可以去干大事儿了,灵珠也能更快到达殷夫人肚子里面了,两全其美,皆大欢喜。

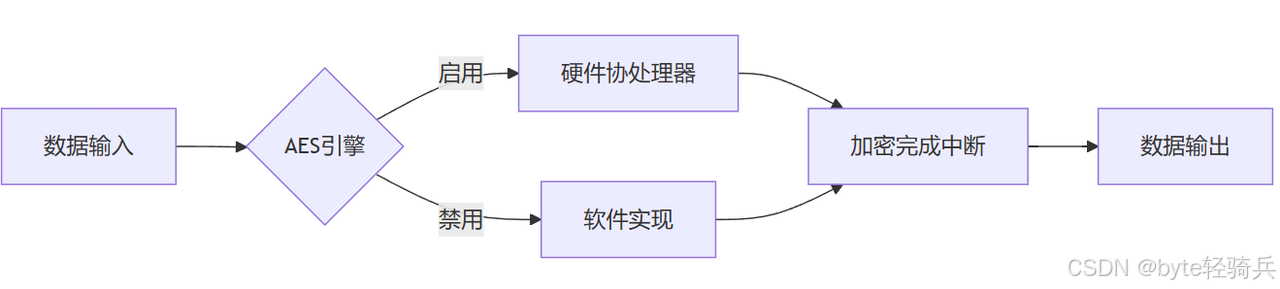
这张图就是我上面描述的过程,有细心的小伙伴可能发现了,我这里用的是双向箭头,因为这里的数据传输,也是双向的,殷夫人收到灵珠了,但是她不会用呀,那她也可以通过DMA通道,找我要使用说明书;太乙真人那边同理啊,太乙真人就相当于一个客服,他可以把殷夫人的问题转述给我。所以这里数据传输是双向的,因为他只是一个通道,这个通道双方都可以使用。


串口
串口可参考我之前写的,这里不过多阐述
STM32CUBEMX配置(工程创建)
基础配置
首先打开STM32CUBEMX,选择我们的芯片(我这里用的是STM32F103C8T6)


配置GPIO:

注意,原理图用到谁,配置谁,不用的不配置,因为会浪费资源。
比如,**我现在要配置PA10、PA9,你想想你是要什么功能?是串口通讯还是普通的IO口?**可以选择:

这里因为是串口通讯,因此选用USART1_RX,同理,PA9未TX。

这里只讲串口,其他的和上述一样。
来到此处USART处:

配置参数:


来到NVIC,勾选中断

添加DMA:






时钟配置

开启此处外部晶振始终才能设置下方图片的外部晶振的参数
可以参考大佬文章:时钟超详细讲解

工程配置



创建用户的.c,.h文件

代码编写
UserUsart1.c
#include "usart.h"
#include "UserUsart1.h"
#include "string.h"
// 发送缓冲区操作
uint8_t usart1_SendBuf[USART1_BUF_SIZE+1];
uint8_t c[USART1_BUF_SIZE+1]; // 发送缓存区
uint16_t usart1_SendLen= 0; // 发送数据长度
// 接收缓冲区操作
uint8_t usart1_RecvBuf[USART1_BUF_SIZE+1]; // 接收数据环形缓冲区
uint16_t usart1_RecvLen=0; // 环形缓冲区的当前放入位置
uint8_t usart1_recvFrame = 0; // 1 接收一个完整数据包. 0:NO
void Usart1_init(void)
{
usart1_RecvLen=0; // 清除标志
usart1_recvFrame=0;
memset(usart1_RecvBuf,0,USART1_BUF_SIZE);
usart1_RecvLen = 0;
memset(usart1_SendBuf,0,USART1_BUF_SIZE);
}
// 通过DMA方式,直接发送数据,注意发送数据不能够超过缓冲区长度
// 注意数据不要溢出
uint8_t Usart1_SendData(uint8_t *buf, uint16_t Size)
{
if(__HAL_DMA_GET_COUNTER(huart1.hdmatx) == 0 ) // 检查上次数据是否发送完成
{
if(Size>USART1_BUF_SIZE)
Size = USART1_BUF_SIZE;
for(int i=0; i<Size; i++)
usart1_SendBuf[i] = buf[i]; // 发送缓存区
usart1_SendLen= Size; // 发送数据长度
HAL_UART_DMAStop(&huart1); // 关闭DMA
HAL_UART_Transmit_DMA(&huart1,usart1_SendBuf,usart1_SendLen); // 启动DMA发送
return 1;
}
else
return 0;
}
// 发送完成中断,打开接收
void USART1_EndTxd_IRQHandler(void)
{
usart1_SendLen = 0; // 发送完成
}
// 启动新的串口读取
void Usart1_ReadData(void)
{
HAL_UART_AbortReceive_IT(&huart1); // 初始化接收缓冲区
usart1_RecvLen=0; // 清除标志
usart1_recvFrame=0;
memset(usart1_RecvBuf,0,USART1_BUF_SIZE); // BUFFER清除, 可以不用
HAL_UART_Receive_IT(&huart1,usart1_RecvBuf,1); // 打开中断,接收第一个数据
}
// 数据包第一个字节,串口中断接收
void USART1_RXD_IRQHandler(void)
{
HAL_UART_Receive_DMA(&huart1, usart1_RecvBuf+1, USART1_BUF_SIZE-1); //打开DMA接收,数据放在g_USART1_DMA_RX_Buffer
__HAL_UART_CLEAR_IDLEFLAG(&huart1); //清除标志位
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //使能IDLE中断
}
// 串口DMA空闲中断接收
void USART1_IDLE_IRQHandler(void)
{
uint32_t temp;
if (__HAL_UART_GET_FLAG(&huart1, UART_FLAG_IDLE) != RESET) //获取IDLE标志位,检查idle标志是否被置位
{
__HAL_UART_CLEAR_IDLEFLAG(&huart1); //清除标志位
HAL_UART_DMAStop(&huart1);
temp = USART1_BUF_SIZE - __HAL_DMA_GET_COUNTER(huart1.hdmarx);
if(usart1_recvFrame==0 && temp>0 && temp<USART1_BUF_SIZE)
{
usart1_RecvLen = temp+1; //总计数减去未传输的数据个数,得到已经接收的数据个数
usart1_recvFrame = 1; // 接受完成标志位置1
}
}
}
//执行命令函数
void user_uart_process(void)
{
if(usart1_recvFrame==1) // UART7 接收到数据,进行数据解析,解析完成后,将数据通过Can1发送出去
{
if(usart1_RecvLen>0)
{
//此处可处理Usart1_RexBuff的数据,比如提取,数据处理等操作
// HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,0);
// HAL_Delay(500);
//HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,1);
}
usart1_recvFrame =0;
Usart1_ReadData();//再次开启中断,方便下次接收
}
}
/*******************************************************************************
此回调函数中,每次接收到的字节 xxx_Rxd_Buf[2]
因为在调用 HAL_UART_IRQHandler(&huart5);时,调用了 UART_Receive_IT(),其中
执行了 __HAL_UART_DISABLE_IT(huart, UART_IT_RXNE),所以接收中断必须在回调函
数中重新开启,最简单的就是重复调用 HAL_UART_Receive_IT(&huart,dbg_Rxd_Buf,1)了
*******************************************************************************/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle)
{
if(UartHandle->Instance == USART1)
USART1_RXD_IRQHandler();
}
// UART发送完成中断调用。 UART_DMATransmitCplt 和 UART_EndTransmit_IT 调用
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *UartHandle)
{
if(UartHandle->Instance == USART1)
USART1_EndTxd_IRQHandler();
}
// 注意:注意:注意:UART空闲中断,用户自定义的,要写进it.h里
void HAL_UART_IdleCallback(UART_HandleTypeDef *UartHandle)
{
if(UartHandle->Instance == USART1)
USART1_IDLE_IRQHandler();
}
UserUsart1.h
#ifndef __USER_USART1_H__
#define __USER_USART1_H__
#define USART1_BUF_SIZE 256 // DMA缓冲区长度
extern void HAL_UART_IdleCallback(UART_HandleTypeDef *UartHandle);
// 发送缓冲区操作
extern uint8_t usart1_SendBuf[USART1_BUF_SIZE+1]; // 发送缓存区
extern uint16_t usart1_SendLen; // 发送数据长度
// 接收缓冲区操作
extern uint8_t usart1_RecvBuf[USART1_BUF_SIZE+1]; // 接收数据环形缓冲区
extern uint16_t usart1_RecvLen; // 环形缓冲区的当前放入位置
extern uint8_t usart1_recvFrame; // 1 接收一个完整数据包. 0:NO
extern void Usart1_init(void);
// 通过DMA方式,直接发送数据,注意发送数据不能够超过缓冲区长度
extern uint8_t Usart1_SendData(uint8_t *buf, uint16_t Size);
// 发送完成中断,打开接收
extern void USART1_EndTxd_IRQHandler(void);
// 启动新的串口读取
extern void Usart1_ReadData(void);
// 从串口收到数据,存入缓存
extern void USART1_RXD_IRQHandler(void);
extern void USART1_IDLE_IRQHandler(void);
//命令执行
extern void user_uart_process();
#endif

stm32f1xx_it.h 的空闲中断一定要加进来,可在UserUsart1.c的代码找到该空闲中断函数

main.c
其中main.c里面一定要注意,要先开启一次接收中断,否则收不到数据。 对于我的main函数而言,Usart1_ReadData();函数就是开启一次中断的。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "dma.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "UserUsart1.h"
#include <stdint.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t a[]={0x01,0x02,0x03};
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_I2C1_Init();
/* USER CODE BEGIN 2 */
Usart1_init();
/* 启动接收中断很重要,先开启一次中断,一定一定一定,不然收不到数据 */
Usart1_ReadData();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//Usart1_SendData(a,3);
user_uart_process();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
// while (1)
// {
// }
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
现象
单片机收:

单片机发:






![[Linux系统编程]进程间通信—system V](https://i-blog.csdnimg.cn/direct/8854f8b0b2d849ce958e71f6b9f059eb.png)