事物的本质是事物本身所固有的、深藏于现象背后并决定或支配现象的方面。

还记得我们上一篇绘制的三角形吗,我们确实能够顺利用OpenGL ES绘制出图形了,这是一个好的开始,但这还远远不够。我们定义的坐标是正三角形,但是绘制出来三角形却拉升了(横屏显示会压缩)。

为了方便大家,我们将OpenGL ES坐标系图再次贴出。OpenGL ES的坐标系是一个正方形,他的四个顶点分别对应GLSurfaceView的四个顶点,这个是定死的我们无法改变,那要怎么才能让我的三角形变成等边三角形呢?既然坐标系为正方形,那么我们让GLSurfaceView也为正方形是否可行呢?
1. 方式一:设置GLSurfaceView宽高相等
注意这里有个误区就是OpenGL ES坐标顶点对应的是GLSurfaceView的四个顶点,而不是屏幕的四个顶点。所以好多文章说变形拉升什么的,甚至是官方文档都和手机屏幕扯上关系。我现在可以明确的告诉大家的是,这和手机的屏幕一点关系也没有。
那为什么又要说和屏幕有关系,其本质是将GLSurfaceView的宽高使用了match_parent导致GLSurfaceView大小和屏幕相同而已,但是变形拉升只和GLSurfaceView的大小有关,GLSurfaceView如果不是一个正方形,那么画出的图形就会变形。
既然我们知道了上述缘由后,最简单的方式就有了,就是设置GLSurfaceView的宽高相等即可:
<com.android.xz.opengldemo.view.TriangleGLSurfaceView
android:layout_width="400dp"
android:layout_height="400dp"/>
运行看看效果是否可行:

不出我们所料,果然是行得通的!!!
但是世界的运行往往不是我们人为能控制的,GLSurfaceView的宽高往往不是正方形,他要和应用相结合,他可能是游戏全屏界面,也可能是某个显示视频的预览界面,亦或是嵌到某个犄角旮旯充当不重要的视图,这个时候我们就引入了下面的方式。
2. 方式二:修改顶点坐标数据
当GLSurfaceView的宽高不一致的时,我们该如何是好???就比如我们现在GLSurfaceView是全屏的。
我们来分析下,GLSurfaceView目前全屏后,视图高被拉升了,原本三角形的top顶点到底边的垂直距离是0.866,也就是说我们按照GLSurfaceView拉升比缩放这个距离是不是也是可行的?
// 三角形三个点的坐标,逆时针绘制
static float triangleCoords[] = { // 坐标逆时针顺序
0.0f, 0.616f, 0.0f, // top
-0.5f, -0.25f, 0.0f, // bottom left
0.5f, -0.25f, 0.0f // bottom right
};
好了开始动手干,我们在Triangle类中surfaceChanged方法中重新计算缩放后Y的坐标点,如下:
public void surfaceChanged(int width, int height) {
// 设置OpenGL ES画布大小
GLES20.glViewport(0, 0, width, height);
float radio = (float) width / height;
triangleCoords = new float[]{ // 坐标逆时针顺序
0.0f, 0.616f * radio, 0.0f, // top
-0.5f, -0.25f * radio, 0.0f, // bottom left
0.5f, -0.25f * radio, 0.0f // bottom right
};
// 初始化形状坐标的顶点字节缓冲区
ByteBuffer bb = ByteBuffer.allocateDirect(
// (number of coordinate values * 4 bytes per float)
triangleCoords.length * 4);
// use the device hardware's native byte order
bb.order(ByteOrder.nativeOrder());
// create a floating point buffer from the ByteBuffer
vertexBuffer = bb.asFloatBuffer();
// add the coordinates to the FloatBuffer
vertexBuffer.put(triangleCoords);
// set the buffer to read the first coordinate
vertexBuffer.position(0);
}
查看效果:

其实在没有看到效果时,我已经猜到最后肯定会绘制出正三角形,当然看了效果我们也就踏实了。
OpenGL ES绘图变形,其本质无非就是要解决View的宽高比和OpenGL ES正方形坐标系的一个变换;如果View是正方形无需变换,长方形该缩放缩放。
目前我们是绘制了一个三角形,顶点只有三个,修改顶点坐标倒还不是那么复杂。如果我们要绘制更加复杂的图像,顶点有几十个上百个,我们又该如何一个一个修改顶点的缩放比呢?聪明的你可能又想到了,我用for循环遍历修改啊那样就会方便很多,那我只能说你这是小聪明,OpenGL ES为我们提供了一个大聪明的方式:矩阵变换
3. 方式三:矩阵变换
我们知道OpenGL ES的世界里是三维空间,我们要对三维空间中的点进行缩放、平移、旋转实际在数学中有一个好的方式就是用矩阵来计算。而矩阵的知识是大学线性代数中的,这个基础需要读者自己去补。
空间中点缩放变换,建议看下这篇文章:【深度好文】3D坐标系下的点的转换矩阵(平移、缩放、旋转、错切)
3.1 自定义矩阵缩放方法
接下来我们使用矩阵相乘变换点的坐标,定义缩放方法如下:
public static void scale(float[] coords, int stride, float sx, float sy, float sz) {
float[] scaleM = {
sx, 0, 0,
0, sy, 0,
0, 0, sz
};
for (int i = 0; i < coords.length; i += stride) {
float x = coords[i];
float y = coords[i + 1];
float z = coords[i + 2];
coords[i] = scaleM[0] * x;
coords[i + 1] = scaleM[4] * y;
coords[i + 2] = scaleM[8] * z;
}
}
修改surfaceChanged缩放坐标代码
public void surfaceChanged(int width, int height) {
// 设置OpenGL ES画布大小
GLES20.glViewport(0, 0, width, height);
scale(triangleCoords, 3, 1, (float) width / height, 1);
// 初始化形状坐标的顶点字节缓冲区
ByteBuffer bb = ByteBuffer.allocateDirect(
// (number of coordinate values * 4 bytes per float)
triangleCoords.length * 4);
// use the device hardware's native byte order
bb.order(ByteOrder.nativeOrder());
// create a floating point buffer from the ByteBuffer
vertexBuffer = bb.asFloatBuffer();
// add the coordinates to the FloatBuffer
vertexBuffer.put(triangleCoords);
// set the buffer to read the first coordinate
vertexBuffer.position(0);
}
运行查看效果,也可得到正三角形。
3.2 使用GLSL缩放
上面方式固然可行,但是大量顶点计算都在CPU端了,如何使用GPU程序去并行计算?
OpenGL ES也提供了矩阵相乘的方式,在三维图形学中,一般使用的是4阶矩阵。在DirectX中使用的是行向量,如[xyzw],所以与矩阵相乘时,向量在前矩阵在后。OpenGL中使用的是列向量,如[xyzx]T,所以与矩阵相乘时,矩阵在前,向量在后,我们最终通过“变换矩阵”来得到我们想要的向量。
修改顶点着色器代码并定义变换矩阵如下:
// 顶点着色器代码
private final String vertexShaderCode =
// 传入变换矩阵
"uniform mat4 uMVPMatrix;" +
"attribute vec4 vPosition;" +
"void main() {" +
// 变换矩阵与顶点坐标相乘等到新的坐标
" gl_Position = uMVPMatrix * vPosition;" +
"}";
/**
* Shader程序中矩阵属性的句柄
*/
private int vPMatrixHandle;
// 最终变化矩阵
private final float[] mMVPMatrix = new float[16];
记得在surfaceCreated中获取矩阵属性句柄
public void surfaceCreated() {
...
// 获取绘制矩阵句柄
vPMatrixHandle = GLES20.glGetUniformLocation(mProgram, "uMVPMatrix");
}
在surfaceChanged中设置缩放矩阵
public void surfaceChanged(int width, int height) {
// 设置OpenGL ES画布大小
GLES20.glViewport(0, 0, width, height);
float radio = (float) width / height;
float[] scaleMatrix = new float[]{
1, 0, 0, 0,
0, radio, 0, 0,
0, 0, 1, 0,
0, 0, 0, 1
};
// 将缩放矩阵拷贝到变换矩阵中
System.arraycopy(scaleMatrix, 0, mMVPMatrix, 0, scaleMatrix.length);
}
在draw方法中将缩放矩阵传给OpenGL ES程序
public void draw() {
...
// 将缩放矩阵传递给着色器程序
GLES20.glUniformMatrix4fv(vPMatrixHandle, 1, false, mMVPMatrix, 0);
// 画三角形
GLES20.glDrawArrays(GLES20.GL_TRIANGLES, 0, vertexCount);
// 禁用顶点阵列
GLES20.glDisableVertexAttribArray(positionHandle);
}
运行查看效果,也可得到正三角形。
本文到现在已经讲了很多种方式可以正确绘制正三角形,但是到现在还没有到正真要讲的内容。我们发现将缩放矩阵传入着色器程序貌似已经完成了最终的目的,如果我们仅仅只是为了把三角形画正那么到这里应该就结束了。世界的运行往往出乎我们的意料,现在可能要求你缩放,但是未来可能还会平移、二维旋转、三维旋转、镜像等等操作,如果要我们去定义各种矩阵,那简直是灾难,于是下面的方式就应运而生了。
4. 相机和投影
- 投影:OpenGL 中主要有两种投影模式,分别是正交投影和透视投影
- 相机:相机视图顾名思义就相当于站在相机的角度观察某个物体,相机会看到投影到近平面的物体
4.1 投影
OpenGL提供了两种投影变换矩阵如下

透视投影

学过素描的应该都知道透视图的概念,符合人眼习惯,呈现近大远小的效果。
/**
* @param m 生成的投影矩阵,float[4*4]
* @param mOffset 填充时候起始的偏移量
* @param left 近平面left边的x坐标
* @param right 近平面right边的x坐标
* @param bottom 近平面bottom边的y坐标
* @param top 近平面top边的y坐标
* @param near 近平面距离摄像机的距离
* @param far 远平面距离摄像机的距离
*/
public static void frustumM(float[] m, int mOffset,
float left, float right, float bottom, float top,
float near, float far) {
}
正交投影

该投影方式图像大小不会随着距离变化而变化
/**
* @param m 生成的投影矩阵,float[4*4]
* @param mOffset 填充时候起始的偏移量
* @param left 近平面left边的x坐标
* @param right 近平面right边的x坐标
* @param bottom 近平面bottom边的y坐标
* @param top 近平面top边的y坐标
* @param near 近平面距离摄像机的距离
* @param far 远平面距离摄像机的距离
*/
public static void orthoM(float[] m, int mOffset,
float left, float right, float bottom, float top,
float near, float far) {
}
- 不管是正交投影还是透视投影,最终都是将视景体内的物体投影在近平面上,这也是 3D 坐标转换到 2D 坐标的关键一步。
- 而近平面上的坐标接着也会转换成归一化设备坐标,再映射到屏幕视口上。
- 为了解决之前的图像拉伸问题,就是要保证近平面的宽高比和视口的宽高比一致,而且是以较短的那一边作为 1 的标准,让图像保持居中。
4.2 相机
相机位置设置
/**
*
* @param rm 生成的摄像机矩阵,float[16]
* @param rmOffset 填充时候的起始偏移量
* @param eyeX 摄像机x坐标
* @param eyeY 摄像机y坐标
* @param eyeZ 摄像机z坐标
* @param centerX 观察目标点的x坐标
* @param centerY 观察目标点的y坐标
* @param centerZ 观察目标点的z坐标
* @param upX 摄像机up向量在x上的分量
* @param upY 摄像机up向量在y上的分量
* @param upZ 摄像机up向量在z上的分量
*/
public static void setLookAtM(float[] rm, int rmOffset,
float eyeX, float eyeY, float eyeZ,
float centerX, float centerY, float centerZ, float upX, float upY,
float upZ) {
}
- eyeX,eyeY,eyeZ:摄像机坐标。
- centerX,centerY,centerZ:观察点坐标,和摄像机坐标一起决定了摄像机的观察方向,即向量(centerX - eyeX, centerY - eyeY, centerZ - eyeZ)。观察方向不朝向视景体是无法看到的。
- upX,upY,upZ:摄像机up向量。相对于人眼观察物体中,人头的朝向,头的朝向影响了最后的成像。同样以图来说明:
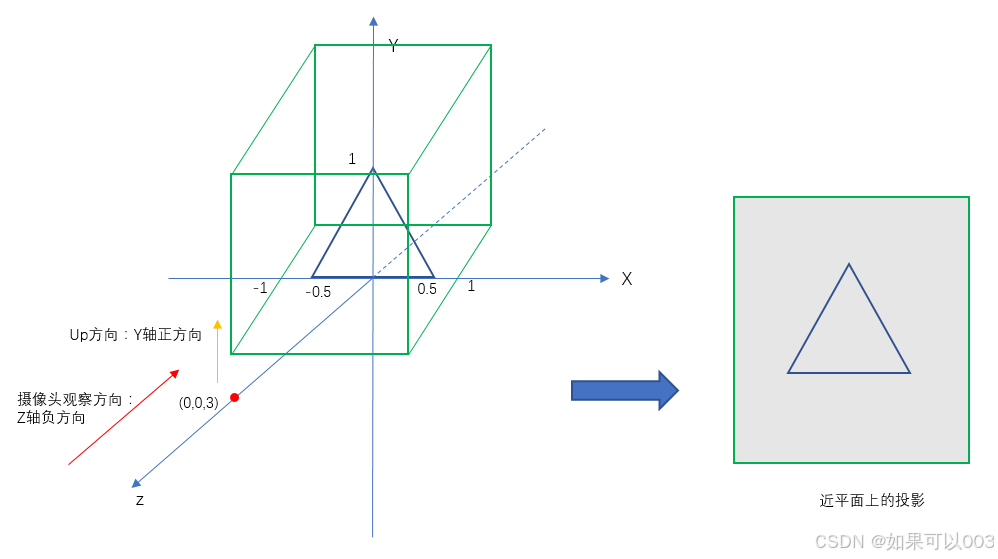
当up向量为Y的正方向时,正如我们头顶对着天花板,所以观察到的物体是正的,投影在近平面的样子就是正的,如右图
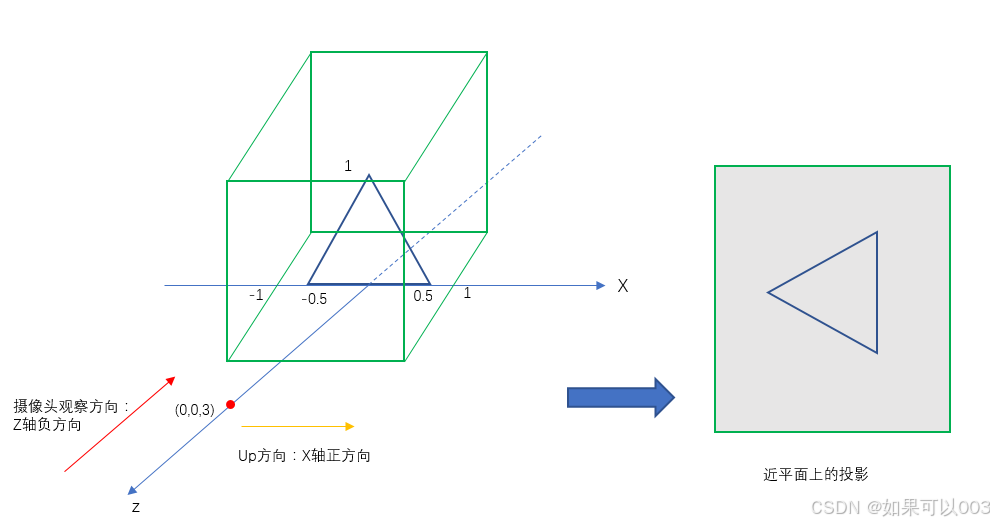
当up向量为X正方向时,正如我们向右90度歪着脑袋去看这个三角形,看到的三角形就会是向左旋转了90度的三角形
再比如up向量如果为Z轴正方向,就相当于仰着头去看这个三角形,但是因为我们的up向量和观察方向平行了,所以我们什么也看不到,就比如仰着头去看你身前的物体时,你什么也看不到。
所以在设置up向量时,一般总是设置为(0,1,0),这是大多数观察时头朝上的方向。注意:up向量的大小无关紧要,有意义的只有方向。
4.3 near、far的取值范围规定
- 正交投影时,摄像机可位于视景体中间,此时near < 0,far > 0,近平面位于视点后面(Z轴正方向),远平面位于视点前面(Z轴负方向)
- 正交投影时,视景体也可位于视点后面(Z轴正方向),此时near < 0, far < 0
- 正交投影时,far 和 near没有规定的大小关系,既可以far > near 也可以 far < near,只要物体在视景体内都可以被观察到。
- 透视投影时,far>near>0;我们不考虑其他情况,我们默认就在Z轴上看物体
当centerZ - eyeZ>0时:近平面nearZ坐标=eyeZ+near,远平面farZ坐标=eyeZ+far;
当centerZ - eyeZ<0时:近平面nearZ坐标=eyeZ-near,远平面farZ坐标=eyeZ-far;
我们要保证物体Z坐标在nearZ和farZ之间就能看到,也就是物体在视景里就能看到。
4.4 构造模型矩阵
根据上面的理论知识,我们不用再手动构造一个缩放矩阵了,我们定义如下三个矩阵并进行变换
public class Triangle {
...
// vPMatrix是“模型视图投影矩阵”的缩写
// 最终变化矩阵
private final float[] mMVPMatrix = new float[16];
// 投影矩阵
private final float[] mProjectionMatrix = new float[16];
// 相机矩阵
private final float[] mViewMatrix = new float[16];
public void surfaceChanged(int width, int height) {
// 设置OpenGL ES画布大小
GLES20.glViewport(0, 0, width, height);
float ratio;
if (width > height) {
ratio = (float) width / height;
// 横屏使用
// 透视投影,特点:物体离视点越远,呈现出来的越小。离视点越近,呈现出来的越大
// 该投影矩阵应用于对象坐标
Matrix.frustumM(mProjectionMatrix, 0, -ratio, ratio, -1, 1, 3, 7);
} else {
ratio = (float) height / width;
// 竖屏使用
// 透视投影,特点:物体离视点越远,呈现出来的越小。离视点越近,呈现出来的越大
// 该投影矩阵应用于对象坐标
Matrix.frustumM(mProjectionMatrix, 0, -1, 1, -ratio, ratio, 3, 7);
}
Matrix.setLookAtM(mViewMatrix, 0,
0, 0, 3f,
0f, 0f, 0f,
0f, 1.0f, 0.0f);
// Calculate the projection and view transformation
Matrix.multiplyMM(mMVPMatrix, 0, mProjectionMatrix, 0, mViewMatrix, 0);
}
}
说明:我们使用frustumM做透视矩阵时,我们要把近平面宽高和屏幕宽高比例对应,我们以较短的一边作为1,按比例拉升即可。而far>near>0遵循此原则即可。
设置相机setLookAtM参数,我们只需要注意eyeZ的取值,根据上面的说明正确取值。上面方法取值为3那么近平面的nearZ坐标=eyeZ-near=0和物体z坐标重合,看到的物体比例正好不会变大也不会缩小。
最后我们用multiplyMM方法将投影矩阵和相机矩阵转换为最终的矩阵,然后传给着色器程序即可。
运行程序也可得到正三角形。
相机和投影概念实际上是为3D模型准备的,现在我们把他用在2D图形上,着实有中降维打击,大炮打苍蝇的感觉。但是我们不得不了解这个强大的工具,为将来遇到的3D场景变换做准备。
最后
我们都知道独孤九剑,剑法的最高境界是无招。上述介绍的几种方式都可谓是剑招,当我们了解了事物运行的本质后,这几种方式皆可为我所用,在适当的场景下选择合适的方式,甚至可以创造招式。
《黑客帝国》中尼奥复活后了解了虚拟世界的本质,整个世界的运行不过就是一串串数字。原来难以翻越的高山,现在也只是眼下的风景。还记的我们第一篇章吗Android OpenGLES2.0开发(一):艰难的开始,现在的我觉得脚下有路、心中有光,也期待未来会更美好。
参考:
- https://juejin.cn/post/6844903614838751240
- https://cloud.tencent.com/developer/article/1015587
- https://www.nxrte.com/jishu/13722.html