往期知识点记录:
- 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总
- 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~
- 子系统开发内核
- 轻量系统内核(LiteOS-M)
- 轻量系统内核(LiteOS-M)【中断管理】
- 轻量系统内核(LiteOS-M)【任务管理】
- 轻量系统内核(LiteOS-M)【内存管理】
- 轻量系统内核(LiteOS-M)【内核通信机制】
- 轻量系统内核(LiteOS-M)【时间管理】
- 轻量系统内核(LiteOS-M)【扩展组件】
- 轻量系统内核(LiteOS-M)【内存调测】
- 轻量系统内核(LiteOS-M)【异常调测】
- 轻量系统内核(LiteOS-M)【Trace调测】
- 轻量系统内核(LiteOS-M)【LMS调测】
- 轻量系统内核(LiteOS-M)【SHELL】
- 小型系统内核(LiteOS-A)【概述】
- 小型系统内核(LiteOS-A)【内核启动】
- 小型系统内核(LiteOS-A)【中断及异常处理】
- 标准系统内核(Linux)【New IP内核协议栈】
- 标准系统内核(Linux)【内核增强特性 > 任务调度】
- 持续更新中……
事件
基本概念
事件(Event)是一种任务间通信的机制,可用于任务间的同步。
多任务环境下,任务之间往往需要同步操作,一个等待即是一个同步。事件可以提供一对多、多对多的同步操作。
-
一对多同步模型:一个任务等待多个事件的触发。可以是任意一个事件发生时唤醒任务处理事件,也可以是几个事件都发生后才唤醒任务处理事件。
-
多对多同步模型:多个任务等待多个事件的触发。
OpenHarmony LiteOS-A的事件模块提供的事件,具有如下特点:
-
任务通过创建事件控制块来触发事件或等待事件。
-
事件间相互独立,内部实现为一个32位无符号整型,每一位标识一种事件类型。(0表示该时间类型未发生,1表示该事件类型已经发生,一共31种事件类型,第25bit位(
0x02U << 24)系统保留) -
事件仅用于任务间的同步,不提供数据传输功能。
-
多次向事件控制块写入同一事件类型,在被清零前等效于只写入一次。
-
多个任务可以对同一事件进行读写操作。
-
支持事件读写超时机制。
运行机制
事件控制块
/**
* 事件控制块数据结构
*/
typedef struct tagEvent {
UINT32 uwEventID; /* 事件集合,表示已经处理(写入和清零)的事件集合 */
LOS_DL_LIST stEventList; /* 等待特定事件的任务链表 */
} EVENT_CB_S, *PEVENT_CB_S;
事件运作原理
事件初始化:会创建一个事件控制块,该控制块维护一个已处理的事件集合,以及等待特定事件的任务链表。
写事件:会向事件控制块写入指定的事件,事件控制块更新事件集合,并遍历任务链表,根据任务等待具体条件满足情况决定是否唤醒相关任务。
读事件:如果读取的事件已存在时,会直接同步返回。其他情况会根据超时时间以及事件触发情况,来决定返回时机:等待的事件条件在超时时间耗尽之前到达,阻塞任务会被直接唤醒,否则超时时间耗尽该任务才会被唤醒。
读事件条件满足与否取决于入参eventMask和mode,eventMask即需要关注的事件类型掩码。mode是具体处理方式,分以下三种情况:
-
LOS_WAITMODE_AND:逻辑与,基于接口传入的事件类型掩码eventMask,只有这些事件都已经发生才能读取成功,否则该任务将阻塞等待或者返回错误码。
-
LOS_WAITMODE_OR:逻辑或,基于接口传入的事件类型掩码eventMask,只要这些事件中有任一种事件发生就可以读取成功,否则该任务将阻塞等待或者返回错误码。
-
LOS_WAITMODE_CLR:这是一种附加读取模式,需要与所有事件模式或任一事件模式结合使用(LOS_WAITMODE_AND | LOS_WAITMODE_CLR或 LOS_WAITMODE_OR | LOS_WAITMODE_CLR)。在这种模式下,当设置的所有事件模式或任一事件模式读取成功后,会自动清除事件控制块中对应的事件类型位。
事件清零:根据指定掩码,去对事件控制块的事件集合进行清零操作。当掩码为0时,表示将事件集合全部清零。当掩码为0xffff时,表示不清除任何事件,保持事件集合原状。
事件销毁:销毁指定的事件控制块。
图1 小型系统事件运作原理图

开发指导
接口说明
OpenHarmony LiteOS-A内核的事件模块提供下面几种功能。
表1 事件模块接口
| 功能分类 | 接口描述 |
|---|---|
| 初始化事件 | LOS_EventInit:初始化一个事件控制块 |
| 读/写事件 | - LOS_EventRead:读取指定事件类型,超时时间为相对时间:单位为Tick - LOS_EventWrite:写指定的事件类型 |
| 清除事件 | LOS_EventClear:清除指定的事件类型 |
| 校验事件掩码 | - LOS_EventPoll:根据用户传入的事件ID、事件掩码及读取模式,返回用户传入的事件是否符合预期 - LOS_EventDestroy:销毁指定的事件控制块 |
| 销毁事件 | LOS_EventDestroy:销毁指定的事件控制块 |
开发流程
事件的典型开发流程:
-
初始化事件控制块
-
阻塞读事件控制块
-
写入相关事件
-
阻塞任务被唤醒,读取事件并检查是否满足要求
-
处理事件控制块
-
事件控制块销毁
说明:
进行事件读写操作时,事件的第25bit(
0x02U << 24)为保留bit位,不可以进行位设置。对同一事件反复写入,算作一次写入。
编程实例
实例描述
示例中,任务Example_TaskEntry创建一个任务Example_Event,Example_Event读事件阻塞,Example_TaskEntry向该任务写事件。可以通过示例日志中打印的先后顺序理解事件操作时伴随的任务切换。
-
在任务Example_TaskEntry创建任务Example_Event,其中任务Example_Event优先级高于Example_TaskEntry。
-
在任务Example_Event中读事件0x00000001,阻塞,发生任务切换,执行任务Example_TaskEntry。
-
在任务Example_TaskEntry向任务Example_Event写事件0x00000001,发生任务切换,执行任务Example_Event。
-
Example_Event得以执行,直到任务结束。
-
Example_TaskEntry得以执行,直到任务结束。
编程示例
本演示代码在./kernel/liteos_a/testsuites/kernel/src/osTest.c中编译验证,在TestTaskEntry中调用验证入口函数Example_EventEntry。
示例代码如下:
#include "los_event.h"
#include "los_task.h"
#include "securec.h"
/* 任务ID */
UINT32 g_testTaskId;
/* 事件控制结构体 */
EVENT_CB_S g_exampleEvent;
/* 等待的事件类型 */
#define EVENT_WAIT 0x00000001
#define EVENT_TIMEOUT 500
/* 用例任务入口函数 */
VOID Example_Event(VOID)
{
UINT32 event;
/* 超时等待方式读事件,超时时间为100 ticks, 若100 ticks后未读取到指定事件,读事件超时,任务直接唤醒 */
dprintf("Example_Event wait event 0x%x \n", EVENT_WAIT);
event = LOS_EventRead(&g_exampleEvent, EVENT_WAIT, LOS_WAITMODE_AND, EVENT_TIMEOUT);
if (event == EVENT_WAIT) {
dprintf("Example_Event,read event :0x%x\n", event);
} else {
dprintf("Example_Event,read event timeout\n");
}
}
UINT32 Example_EventEntry(VOID)
{
UINT32 ret;
TSK_INIT_PARAM_S task1;
/* 事件初始化 */
ret = LOS_EventInit(&g_exampleEvent);
if (ret != LOS_OK) {
dprintf("init event failed .\n");
return -1;
}
/* 创建任务 */
(VOID)memset_s(&task1, sizeof(TSK_INIT_PARAM_S), 0, sizeof(TSK_INIT_PARAM_S));
task1.pfnTaskEntry = (TSK_ENTRY_FUNC)Example_Event;
task1.pcName = "EventTsk1";
task1.uwStackSize = LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE;
task1.usTaskPrio = 5;
ret = LOS_TaskCreate(&g_testTaskId, &task1);
if (ret != LOS_OK) {
dprintf("task create failed.\n");
return LOS_NOK;
}
/* 写g_testTaskId 等待事件 */
dprintf("Example_TaskEntry write event.\n");
ret = LOS_EventWrite(&g_exampleEvent, EVENT_WAIT);
if (ret != LOS_OK) {
dprintf("event write failed.\n");
return LOS_NOK;
}
/* 清标志位 */
dprintf("EventMask:%d\n", g_exampleEvent.uwEventID);
LOS_EventClear(&g_exampleEvent, ~g_exampleEvent.uwEventID);
dprintf("EventMask:%d\n", g_exampleEvent.uwEventID);
return LOS_OK;
}
结果验证
编译运行得到的结果为:
Example_Event wait event 0x1
Example_TaskEntry write event.
Example_Event,read event :0x1
EventMask:1
EventMask:0
信号量
基本概念
信号量(Semaphore)是一种实现任务间通信的机制,可以实现任务间同步或共享资源的互斥访问。
一个信号量的数据结构中,通常有一个计数值,用于对有效资源数的计数,表示剩下的可被使用的共享资源数,其值的含义分两种情况:
-
0,表示该信号量当前不可获取,因此可能存在正在等待该信号量的任务。
-
正值,表示该信号量当前可被获取。
以同步为目的的信号量和以互斥为目的的信号量在使用上有如下不同:
-
用作互斥时,初始信号量计数值不为0,表示可用的共享资源个数。在需要使用共享资源前,先获取信号量,然后使用一个共享资源,使用完毕后释放信号量。这样在共享资源被取完,即信号量计数减至0时,其他需要获取信号量的任务将被阻塞,从而保证了共享资源的互斥访问。另外,当共享资源数为1时,建议使用二值信号量,一种类似于互斥锁的机制。
-
用作同步时,初始信号量计数值为0。任务1因获取不到信号量而阻塞,直到任务2或者某中断释放信号量,任务1才得以进入Ready或Running态,从而达到了任务间的同步。
运行机制
信号量控制块
/**
* 信号量控制块数据结构
*/
typedef struct {
UINT16 semStat; /* 信号量状态 */
UINT16 semType; /* 信号量类型 */
UINT16 semCount; /* 信号量计数 */
UINT16 semId; /* 信号量索引号 */
LOS_DL_LIST semList; /* 用于插入阻塞于信号量的任务 */
} LosSemCB;
信号量运作原理
信号量允许多个任务在同一时刻访问共享资源,但会限制同一时刻访问此资源的最大任务数目。当访问资源的任务数达到该资源允许的最大数量时,会阻塞其他试图获取该资源的任务,直到有任务释放该信号量。
-
信号量初始化 初始化时为配置的N个信号量申请内存(N值可以由用户自行配置,通过LOSCFG_BASE_IPC_SEM_LIMIT宏实现),并把所有信号量初始化成未使用,加入到未使用链表中供系统使用
-
信号量创建 从未使用的信号量链表中获取一个信号量,并设定初值。
-
信号量申请 若其计数器值大于0,则直接减1返回成功。否则任务阻塞,等待其它任务释放该信号量,等待的超时时间可设定。当任务被一个信号量阻塞时,将该任务挂到信号量等待任务队列的队尾。
-
信号量释放 若没有任务等待该信号量,则直接将计数器加1返回。否则唤醒该信号量等待任务队列上的第一个任务。
-
信号量删除 将正在使用的信号量置为未使用信号量,并挂回到未使用链表。
运行示意图如下图所示:
图1 小型系统信号量运作示意图

开发指导
接口说明
表1 创建/删除信号量
| 接口名称 | 描述 |
|---|---|
| LOS_SemCreate | 创建信号量,返回信号量ID |
| LOS_BinarySemCreate | 创建二值信号量,其计数值最大为1 |
| LOS_SemDelete | 删除指定的信号量 |
表2 申请/释放信号量
| 接口名称 | 描述 |
|---|---|
| LOS_SemPend | 申请指定的信号量,并设置超时时间 |
| LOS_SemPost | 释放指定的信号量 |
开发流程
-
创建信号量LOS_SemCreate,若要创建二值信号量则调用LOS_BinarySemCreate。
-
申请信号量LOS_SemPend。
-
释放信号量LOS_SemPost。
-
删除信号量LOS_SemDelete。
说明: 由于中断不能被阻塞,因此不能在中断中使用阻塞模式申请信号量。
编程实例
实例描述
本实例实现如下功能:
-
测试任务ExampleSem创建一个信号量,锁任务调度,创建两个任务ExampleSemTask1、ExampleSemTask2, ExampleSemTask2优先级高于ExampleSemTask1,两个任务中申请同一信号量,解锁任务调度后两任务阻塞,测试任务ExampleSem释放信号量。
-
ExampleSemTask2得到信号量,被调度,然后任务休眠20Ticks,ExampleSemTask2延迟,ExampleSemTask1被唤醒。
-
ExampleSemTask1定时阻塞模式申请信号量,等待时间为10Ticks,因信号量仍被ExampleSemTask2持有,ExampleSemTask1挂起,10Ticks后仍未得到信号量,ExampleSemTask1被唤醒,试图以永久阻塞模式申请信号量,ExampleSemTask1挂起。
-
20Tick后ExampleSemTask2唤醒, 释放信号量后,ExampleSemTask1得到信号量被调度运行,最后释放信号量。
-
ExampleSemTask1执行完,400Ticks后任务ExampleSem被唤醒,执行删除信号量。
编程示例
本演示代码在./kernel/liteos_a/testsuites/kernel/src/osTest.c中编译验证,在TestTaskEntry中调用验证入口函数ExampleSem。
示例代码如下:
#include "los_sem.h"
#include "securec.h"
/* 任务ID */
static UINT32 g_testTaskId01;
static UINT32 g_testTaskId02;
/* 测试任务优先级 */
#define TASK_PRIO_LOW 5
#define TASK_PRIO_HI 4
/* 信号量结构体id */
static UINT32 g_semId;
VOID ExampleSemTask1(VOID)
{
UINT32 ret;
dprintf("ExampleSemTask1 try get sem g_semId, timeout 10 ticks.\n");
/* 定时阻塞模式申请信号量,定时时间为10ticks */
ret = LOS_SemPend(g_semId, 10);
/* 申请到信号量 */
if (ret == LOS_OK) {
LOS_SemPost(g_semId);
return;
}
/* 定时时间到,未申请到信号量 */
if (ret == LOS_ERRNO_SEM_TIMEOUT) {
dprintf("ExampleSemTask1 timeout and try get sem g_semId wait forever.\n");
/*永久阻塞模式申请信号量*/
ret = LOS_SemPend(g_semId, LOS_WAIT_FOREVER);
dprintf("ExampleSemTask1 wait_forever and get sem g_semId.\n");
if (ret == LOS_OK) {
dprintf("ExampleSemTask1 post sem g_semId.\n");
LOS_SemPost(g_semId);
return;
}
}
}
VOID ExampleSemTask2(VOID)
{
UINT32 ret;
dprintf("ExampleSemTask2 try get sem g_semId wait forever.\n");
/* 永久阻塞模式申请信号量 */
ret = LOS_SemPend(g_semId, LOS_WAIT_FOREVER);
if (ret == LOS_OK) {
dprintf("ExampleSemTask2 get sem g_semId and then delay 20 ticks.\n");
}
/* 任务休眠20 ticks */
LOS_TaskDelay(20);
dprintf("ExampleSemTask2 post sem g_semId.\n");
/* 释放信号量 */
LOS_SemPost(g_semId);
return;
}
UINT32 ExampleSem(VOID)
{
UINT32 ret;
TSK_INIT_PARAM_S task1;
TSK_INIT_PARAM_S task2;
/* 创建信号量 */
LOS_SemCreate(0, &g_semId);
/* 锁任务调度 */
LOS_TaskLock();
/* 创建任务1 */
(VOID)memset_s(&task1, sizeof(TSK_INIT_PARAM_S), 0, sizeof(TSK_INIT_PARAM_S));
task1.pfnTaskEntry = (TSK_ENTRY_FUNC)ExampleSemTask1;
task1.pcName = "TestTask1";
task1.uwStackSize = LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE;
task1.usTaskPrio = TASK_PRIO_LOW;
ret = LOS_TaskCreate(&g_testTaskId01, &task1);
if (ret != LOS_OK) {
dprintf("task1 create failed .\n");
return LOS_NOK;
}
/* 创建任务2 */
(VOID)memset_s(&task2, sizeof(TSK_INIT_PARAM_S), 0, sizeof(TSK_INIT_PARAM_S));
task2.pfnTaskEntry = (TSK_ENTRY_FUNC)ExampleSemTask2;
task2.pcName = "TestTask2";
task2.uwStackSize = LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE;
task2.usTaskPrio = TASK_PRIO_HI;
ret = LOS_TaskCreate(&g_testTaskId02, &task2);
if (ret != LOS_OK) {
dprintf("task2 create failed.\n");
return LOS_NOK;
}
/* 解锁任务调度 */
LOS_TaskUnlock();
/* 任务休眠400 ticks */
LOS_TaskDelay(400);
ret = LOS_SemPost(g_semId);
/* 任务休眠400 ticks */
LOS_TaskDelay(400);
/* 删除信号量 */
LOS_SemDelete(g_semId);
return LOS_OK;
}
结果验证
编译运行得到的结果为:
ExampleSemTask2 try get sem g_semId wait forever.
ExampleSemTask1 try get sem g_semId, timeout 10 ticks.
ExampleSemTask1 timeout and try get sem g_semId wait forever.
ExampleSemTask2 get sem g_semId and then delay 20 ticks.
ExampleSemTask2 post sem g_semId.
ExampleSemTask1 wait_forever and get sem g_semId.
ExampleSemTask1 post sem g_semId.
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。

《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN/733GH/overview
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.……
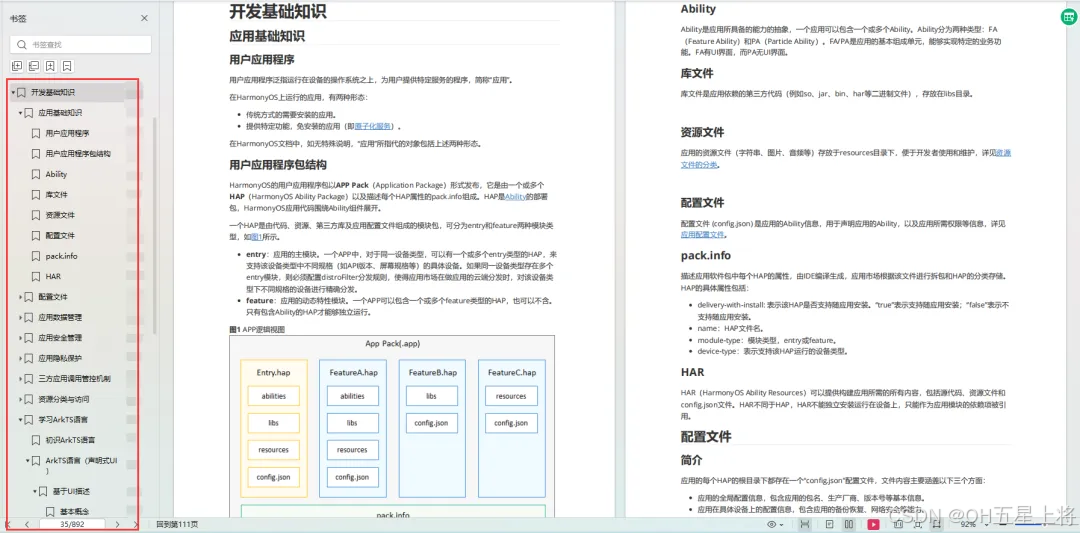
开发基础知识:
1.应用基础知识
2.配置文件
3.应用数据管理
4.应用安全管理
5.应用隐私保护
6.三方应用调用管控机制
7.资源分类与访问
8.学习ArkTS语言
9.……
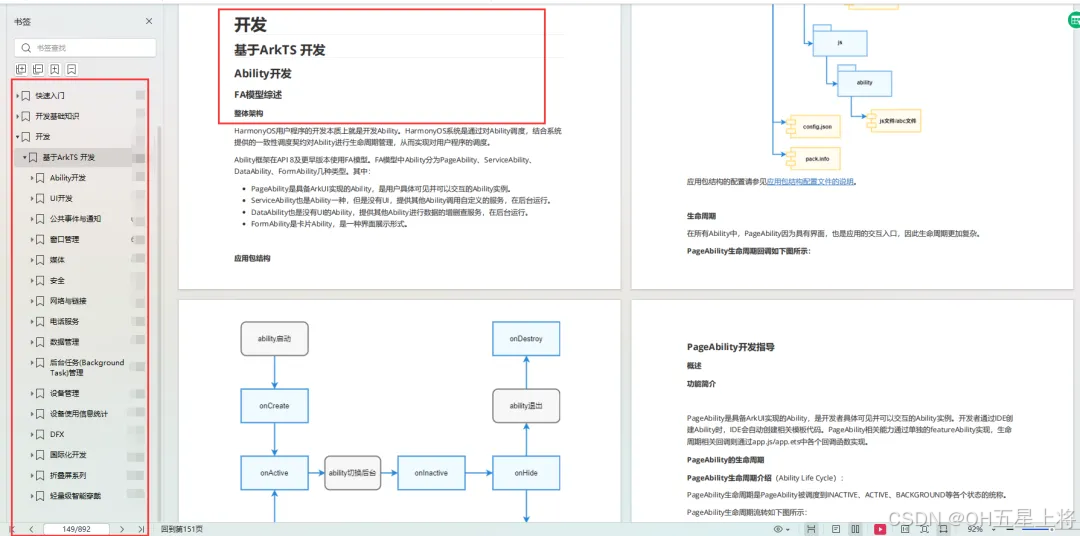
基于ArkTS 开发
1.Ability开发
2.UI开发
3.公共事件与通知
4.窗口管理
5.媒体
6.安全
7.网络与链接
8.电话服务
9.数据管理
10.后台任务(Background Task)管理
11.设备管理
12.设备使用信息统计
13.DFX
14.国际化开发
15.折叠屏系列
16.……
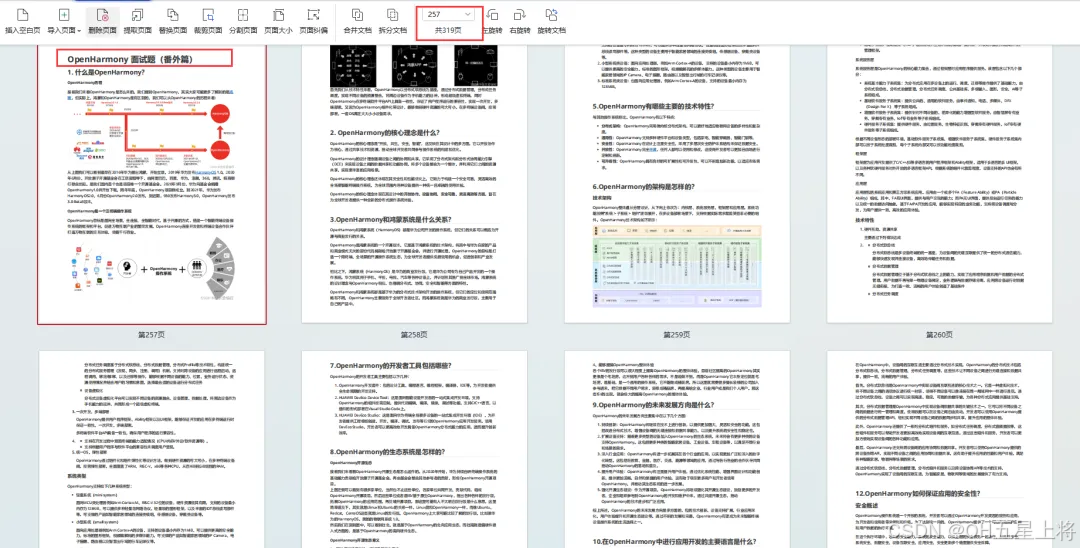
鸿蒙开发面试真题(含参考答案):https://gitcode.com/HarmonyOS_MN/733GH/overview
OpenHarmony 开发环境搭建
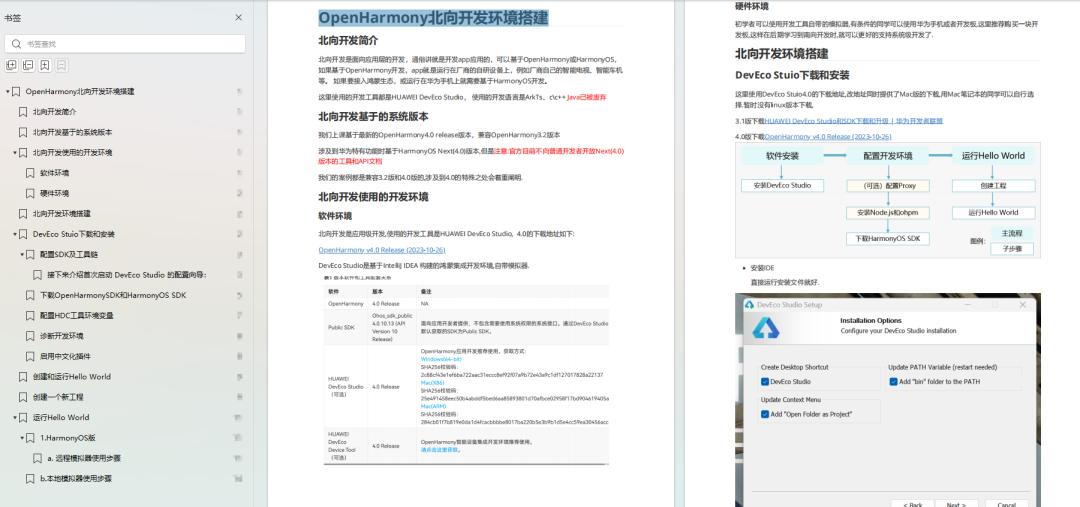
《OpenHarmony源码解析》:https://gitcode.com/HarmonyOS_MN/733GH/overview
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ……
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ……
OpenHarmony 设备开发学习手册:https://gitcode.com/HarmonyOS_MN/733GH/overview