from collections import defaultdict, deque #引入双端队列、特殊字典dafaultdict
def find_all_paths(graph, start, end, path=[]):
# 将起始站点添加到当前路径中
path = path + [start]
# 如果起始站点和终止站点相同,返回当前路径
if start == end:
return [path]
# 如果起始站点不在图中,返回空列表
if start not in graph:
return []
# 初始化一个空列表用于存储所有路径
paths = []
# 遍历起始站点的所有邻居节点
for node in graph[start]:
# 如果邻居节点不在当前路径中
if node not in path:
# 递归调用 find_all_paths 函数,查找从邻居节点到终止节点的所有路径
new_paths = find_all_paths(graph, node, end, path)
# 将新路径添加到所有路径列表中
for p in new_paths:
paths.append(p)
return paths
# 检查两点是否连通
def is_connected(graph, start, end, removed=None):
#记录节点的访问情况
visited = set()
#记录去除的节点
if removed is not None:
visited.add(removed)
queue = deque([start])
visited.add(start)
while queue:
node = queue.popleft()
if node == end:
return True
for neighbor in graph[node]:
if neighbor not in visited:
queue.append(neighbor)
visited.add(neighbor)
return False
# 计算危险系数
def calculate_danger_coefficient(graph, start, end):
if not is_connected(graph, start, end):
return -1
danger_count = 0
for node in graph.keys():
if node not in [start, end]:
# 去除节点node,观察start,end是否连接来确定node是否是中间节点
if not is_connected(graph, start, end, node):
danger_count += 1
return danger_count
# 读取输入
n, m = map(int, input().split())
graph = defaultdict(list)
for _ in range(m):
u, v = map(int, input().split())
graph[u].append(v)
graph[v].append(u)
start_node, end_node = map(int, input().split())
# 计算危险系数
result = calculate_danger_coefficient(graph, start_node, end_node)
print(result)
“这图是不是糊了?”以为是样式缺了?试试手动复制差异在哪?想用对比工具一探究竟……简单到不能再简单的代码,有问题吗?最后的真相:viewBox vs viewbox,preserveAspectRatio vs preserveaspectr…
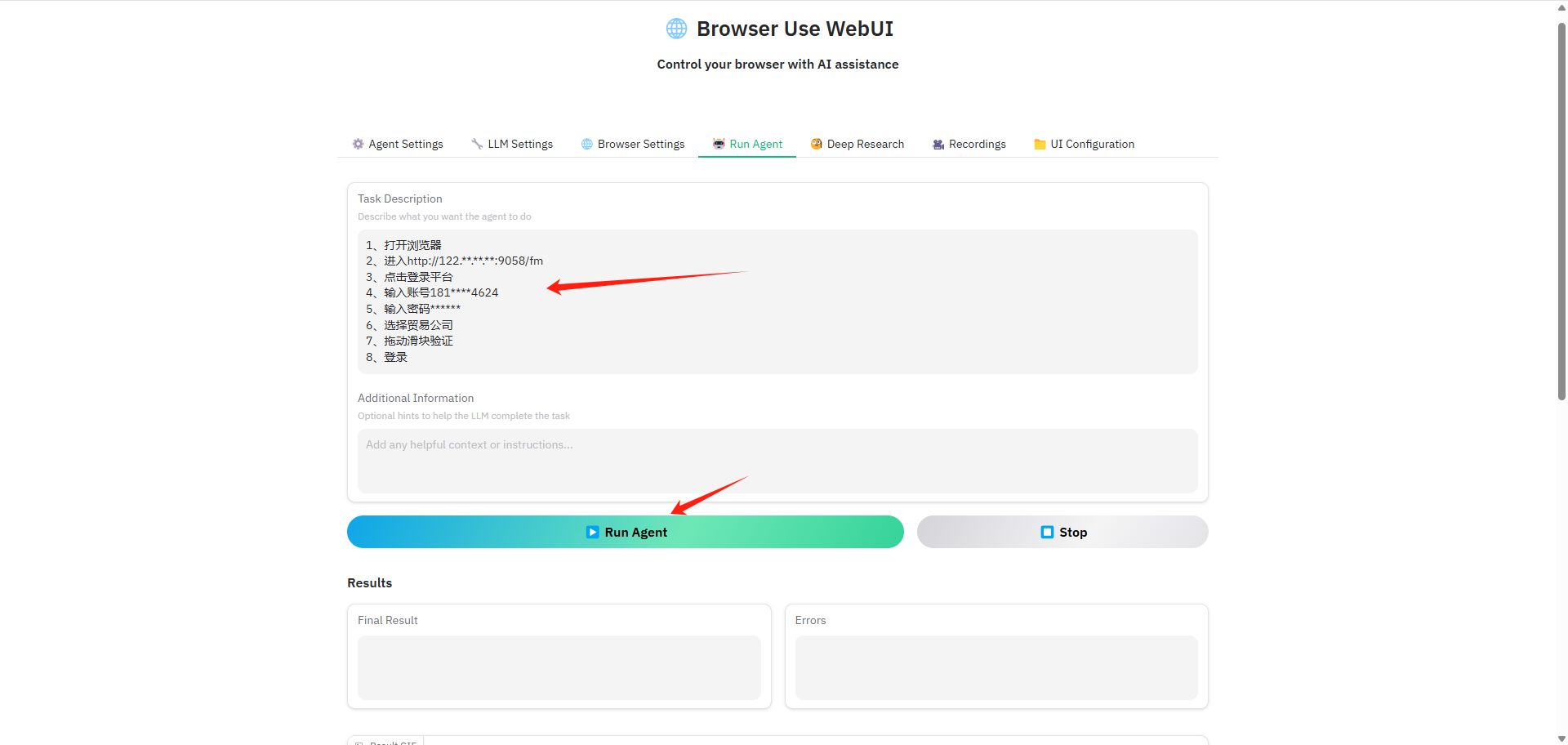
browser-use Web-UI
一、browser-use是什么
Browser Use 是一款开源Python库,专为大语言模型设计的智能浏览器工具,目的是让 AI 能够像人类一样自然地浏览和操作网页。它支持多标签页管理、视觉识别、内容提取,并能记录和重复执行特定动作。…
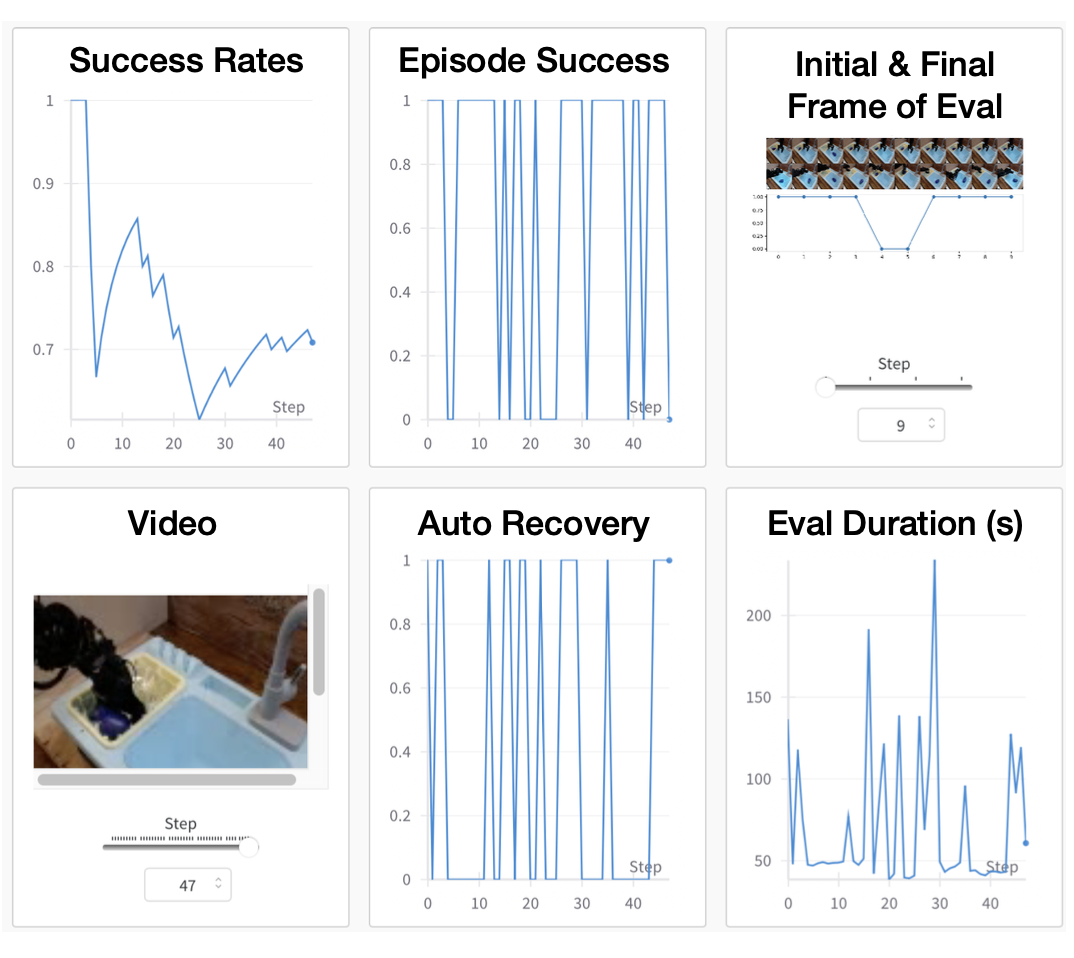
25年3月来自 UC Berkeley 和 Nvidia 的论文“AutoEval: Autonomous Evaluation of Generalist Robot Manipulation Policies in the Real World”。
可规模化且可复现的策略评估一直是机器人学习领域长期存在的挑战。评估对于评估进展和构建更优策略至关重要,但在现…
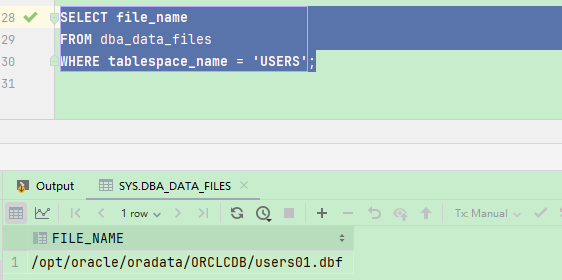
1.集合运算符
查询部门号是10和20的员工信息: ?思考有几种方式解决该问题 ?
SQL> select * from emp where deptno in(10, 20) SQL> select * from emp where deptno10 or deptno20 集合运算:
Select * from emp …

![[ctfshow web入门] web33](https://i-blog.csdnimg.cn/direct/7683d76833c34cc99d7ac1f3a1ea9499.png)