一.内核时间管理
Linux 内核中有大量的函数需要时间管理,比如周期性的调度程序、延时程序、对于我们驱动编写者来说最常用的定时器。硬件定时器提供时钟源,时钟源的频率可以设置, 设置好以后就周期性的产生定时中断,系统使用定时中断来计时。中断周期性产生的频率就是系统频率,也叫做节拍率(tick rate)(有的资料也叫系统频率),比如 1000Hz,100Hz 等等说的就是系统节拍率。系统节拍率是可以设置的,单位是 Hz,我们在编译 Linux 内核的时候可以通过图形化界面设置系统节拍率。

设置好以后打开 Linux 内核源码根目录下的.config 文件,在此文件中有如图定义

Linux 内核会使用 CONFIG_HZ 来设置自己的系统时钟。打开文件 include/asm-generic/param.h,有如下内容:
#undef HZ
#define HZ CONFIG_HZ
#define USER_HZ 100
#define CLOCKS_PER_SEC (USER_HZ)
这里定义了一个宏 HZ,宏 HZ 就是 CONFIG_HZ,因此 HZ=100,我们后面编写 Linux驱动的时候会常常用到 HZ,因为 HZ 表示一秒的节拍数,也就是频率。
Linux 内核使用全局变量 jiffies 来记录系统从启动以来的系统节拍数,系统启动的时候会将 jiffies 初始化为 0,jiffies 定义在文件 include/linux/jiffies.h 中,定义如下:
extern u64 __jiffy_data jiffies_64;
extern unsigned long volatile __jiffy_data jiffies;
第 1行,定义了一个 64 位的 jiffies_64。
第 2行,定义了一个 unsigned long 类型的 32 位的 jiffies。
jiffies_64 和 jiffies 其实是同一个东西, jiffies_64 用于 64 位系统,而 jiffies 用于 32 位系统。为了兼容不同的硬件,jiffies 其实就是 jiffies_64 的低 32 位。
不管是 32 位还是 64 位的 jiffies,都有溢出的风险,溢出以后会重新从 0 开始计数,相当于绕回来了,因此有些资料也将这个现象也叫做绕回。假如 HZ 为最大值 1000 的时候,32 位的 jiffies 只需要 49.7 天就发生了绕回,对于 64 位的 jiffies 来说大概需要5.8 亿年才能绕回,因此 jiffies_64 的绕回忽略不计。处理 32 位 jiffies 的绕回显得尤为重要,Linux 内核提供了如表 所示的几个 API 函数来处理绕回。

如果 unkown 超过 known 的话,time_after 函数返回真,否则返回假。如果 unkown 没有超过 known 的话 time_before 函数返回真,否则返回假。 time_after_eq 函数和 time_after 函数类似,只是多了判断等于这个条件。同理,time_before_eq 函数和 time_before 函数也类似。比如我们要判断某段代码执行时间有没有超时,此时就可以使用如下所示代码:

二.内核定时器简介
Linux 内核定时器采用系统时钟来实现,并不是我们在裸机篇中讲解的 PIT 等硬件定时器。内核定时器并不是周期性运行的,超时以后就会自动关闭,因此如果想要实现周期性定时,那么就需要在定时处理函数中重新开启定时器。
Linux 内核使用 timer_list 结构体表示内核定时器,timer_list 定义在文件include/linux/timer.h 中,定义如下
struct timer_list {
struct list_head entry;
unsigned long expires; /* 定时器超时时间,单位是节拍数 */
struct tvec_base *base;
void (*function)(unsigned long); /* 定时处理函数 */
unsigned long data; /* 要传递给 function 函数的参数 */
int slack;
};
要使用内核定时器首先要先定义一个 timer_list 变量,表示定时器,tiemr_list 结构体的expires 成员变量表示超时时间,单位为节拍数。
1.init_timer 函数
init_timer 函数负责初始化 timer_list 类型变量,当我们定义了一个 timer_list 变量以后一定要先用 init_timer 初始化一下。init_timer 函数原型如下:
void init_timer(struct timer_list *timer)
timer:要初始化定时器。
返回值:没有返回值。
2.add_timer 函数
add_timer 函数用于向 Linux 内核注册定时器,使用 add_timer 函数向内核注册定时器以后,定时器就会开始运行,函数原型如下:
void add_timer(struct timer_list *timer)
timer:要注册的定时器。
返回值:没有返回值。
3.del_timer 函数
del_timer 函数用于删除一个定时器,不管定时器有没有被激活,都可以使用此函数删除。在多处理器系统上,定时器可能会在其他的处理器上运行,因此在调用 del_timer 函数删除定时器之前要先等待其他处理器的定时处理器函数退出。del_timer 函数原型如下:
int del_timer(struct timer_list * timer)
timer:要删除的定时器。
返回值:0,定时器还没被激活;1,定时器已经激活。
4.del_timer_sync 函数
del_timer_sync 函数是 del_timer 函数的同步版,会等待其他处理器使用完定时器再删除,del_timer_sync 不能使用在中断上下文中。del_timer_sync 函数原型如下所示:
int del_timer_sync(struct timer_list *timer)
timer:要删除的定时器。
返回值:0,定时器还没被激活;1,定时器已经激活
5.mod_timer 函数
mod_timer 函数用于修改定时值,如果定时器还没有激活的话,mod_timer 函数会激活定时器!函数原型如下:
int mod_timer(struct timer_list *timer, unsigned long expires)
timer:要修改超时时间(定时值)的定时器。
expires:修改后的超时时间。
返回值:0,调用 mod_timer 函数前定时器未被激活;1,调用 mod_timer 函数前定时器已被激活。
示例代码:


内核短延时函数

三.阻塞和非阻塞IO
这里的“IO”并不是我们学习 STM32 或者其他单片机的时候所说的“GPIO” (也就是引脚)。这里的 IO 指的是 Input/Output,也就是输入/输出,是应用程序对驱动设备的输入/输出操作。当应用程序对设备驱动进行操作的时候,如果不能获取到设备资源,那么阻塞式 IO 就会将应用程序对应的线程挂起,直到设备资源可以获取为止。对于非阻塞 IO,应用程序对应的线程不会挂起,它要么一直轮询等待,直到设备资源可以使用,要么就直接放弃。
应用程序可以使用如下所示示例代码来实现阻塞访问
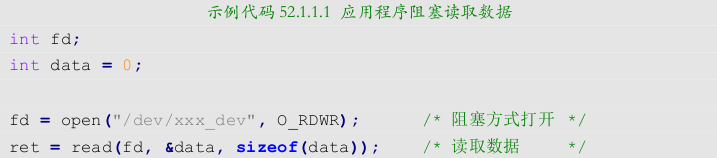
对于设备驱动文件的默认读取方式就是阻塞式的,所以我们前面所有的例程测试 APP 都是采用阻塞 IO。
如果应用程序要采用非阻塞的方式来访问驱动设备文件,可以使用如下所示代码:

1.等待队列
1.1等待队列头
阻塞访问最大的好处就是当设备文件不可操作的时候进程可以进入休眠态,这样可以将CPU 资源让出来。但是,当设备文件可以操作的时候就必须唤醒进程,一般在中断函数里面完成唤醒工作。Linux 内核提供了等待队列(wait queue)来实现阻塞进程的唤醒工作,如果我们要在 驱 动 中使 用 等待 队列 , 必须 创 建并 初 始化 一 个等 待 队 列头 , 等待 队列 头 使用 结 构体wait_queue_head_t 表示, wait_queue_head_t 结构体定义在文件 include/linux/wait.h 中,结构体内容如下所示:
struct __wait_queue_head {
spinlock_t lock;
struct list_head task_list;
};
typedef struct __wait_queue_head wait_queue_head_t;
定义好等待队列头以后需要初始化,使用 init_waitqueue_head 函数初始化等待队列头,函数原型如下:
void init_waitqueue_head(wait_queue_head_t *q)
参数 q 就是要初始化的等待队列头。
也可以使用宏 DECLARE_WAIT_QUEUE_HEAD 来一次性完成等待队列头的定义的初始化。
1.2等待队列项
等待队列头就是一个等待队列的头部,每个访问设备的进程都是一个队列项,当设备不可用的时候就要将这些进程对应的等待队列项添加到等待队列里面。结构体 wait_queue_t 表示等待队列项,结构体内容如下:
struct __wait_queue {
unsigned int flags;
void *private;
wait_queue_func_t func;
struct list_head task_list;
};
typedef struct __wait_queue wait_queue_t;
使用宏 DECLARE_WAITQUEUE 定义并初始化一个等待队列项,宏的内容如下:
DECLARE_WAITQUEUE(name, tsk)
name 就是等待队列项的名字,tsk 表示这个等待队列项属于哪个任务(进程),一般设置为current , 在 Linux 内 核 中 current 相 当 于 一 个 全 局 变 量 , 表 示 当 前 进 程 。 因 此 宏DECLARE_WAITQUEUE 就是给当前正在运行的进程创建并初始化了一个等待队列项。
1.3将队列项添加/移除等待队列头
当设备不可访问的时候就需要将进程对应的等待队列项添加到前面创建的等待队列头中,只有添加到等待队列头中以后进程才能进入休眠态。当设备可以访问以后再将进程对应的等待队列项从等待队列头中移除即可,等待队列项添加 API 函数如下:
void add_wait_queue(wait_queue_head_t *q,
wait_queue_t *wait)
q:等待队列项要加入的等待队列头。
wait:要加入的等待队列项。
返回值:无
等待队列项移除 API 函数如下:
void remove_wait_queue(wait_queue_head_t *q,
wait_queue_t *wait)
1.4等待唤醒
当设备可以使用的时候就要唤醒进入休眠态的进程,唤醒可以使用如下两个函数:
void wake_up(wait_queue_head_t *q)
void wake_up_interruptible(wait_queue_head_t *q)
参数 q 就是要唤醒的等待队列头,这两个函数会将这个等待队列头中的所有进程都唤醒。
wake_up 函数可以唤醒处于 TASK_INTERRUPTIBLE 和 TASK_UNINTERRUPTIBLE 状态的进
程,而 wake_up_interruptible 函数只能唤醒处于 TASK_INTERRUPTIBLE 状态的进程。
1.5等待事件
除了主动唤醒以外,也可以设置等待队列等待某个事件,当这个事件满足以后就自动唤醒等待队列中的进程,和等待事件有关的 API 函数如表 所示:


2.轮询
如果用户应用程序以非阻塞的方式访问设备,设备驱动程序就要提供非阻塞的处理方式,也就是轮询。poll、epoll 和 select 可以用于处理轮询,应用程序通过 select、epoll 或 poll 函数来查询设备是否可以操作,如果可以操作的话就从设备读取或者向设备写入数据。当应用程序调用 select、epoll 或 poll 函数的时候设备驱动程序中的 poll 函数就会执行,因此需要在设备驱动程序中编写 poll 函数。我们先来看一下应用程序中使用的 select、poll 和 epoll 这三个函数。
2.1 select 函数
select 函数原型如下:

nfds:所要监视的这三类文件描述集合中,最大文件描述符加 1。
readfds、writefds 和 exceptfds:这三个指针指向描述符集合,这三个参数指明了关心哪些描述符、需要满足哪些条件等等,这三个参数都是 fd_set 类型的,fd_set 类型变量的每一个位都代表了一个文件描述符。readfds 用于监视指定描述符集的读变化,也就是监视这些文件是否可以读取,只要这些集合里面有一个文件可以读取那么 seclect 就会返回一个大于 0 的值表示文件可以读取。如果没有文件可以读取,那么就会根据 timeout 参数来判断是否超时。可以将 readfs设置为 NULL,表示不关心任何文件的读变化。writefds 和 readfs 类似,只是 writefs 用于监视这些文件是否可以进行写操作。exceptfds 用于监视这些文件的异常。
timeout:超时时间,当我们调用 select 函数等待某些文件描述符可以设置超时时间,超时时间使用结构体 timeval 表示,结构体定义如下所示:
struct timeval {
long tv_sec; /* 秒*/
long tv_usec; /* 微妙*/
};
返回值:0,表示超时发生,但是没有任何文件描述符可以进行操作;-1,发生错误;其他值,可以进行操作的文件描述符个数。
示例代码:

2.2poll函数
在单个线程中,select 函数能够监视的文件描述符数量有最大的限制,一般为 1024,可以修改内核将监视的文件描述符数量改大,但是这样会降低效率!这个时候就可以使用 poll 函数,poll 函数本质上和 select 没有太大的差别,但是 poll 函数没有最大文件描述符限制,Linux 应用程序中 poll 函数原型如下所示:


2.3epoll函数
传统的 selcet 和 poll 函数都会随着所监听的 fd 数量的增加,出现效率低下的问题,而且poll 函数每次必须遍历所有的描述符来检查就绪的描述符,这个过程很浪费时间。为此,epoll应运而生,epoll 就是为处理大并发而准备的,一般常常在网络编程中使用 epoll 函数。
2.4 Linux驱动下的poll函数
当应用程序调用 select 或 poll 函数来对驱动程序进行非阻塞访问的时候,驱动程序file_operations 操作集中的 poll 函数就会执行。所以驱动程序的编写者需要提供对应的 poll 函数,poll 函数原型如下所示:
unsigned int (*poll) (struct file *filp, struct poll_table_struct *wait)
函数参数和返回值含义如下:
filp:要打开的设备文件(文件描述符)。
wait:结构体 poll_table_struct 类型指针,由应用程序传递进来的。一般将此参数传递给poll_wait 函数。
返回值:向应用程序返回设备或者资源状态,可以返回的资源状态如下: