CS224W—02 Node Embeddings
Node Embeddings概念
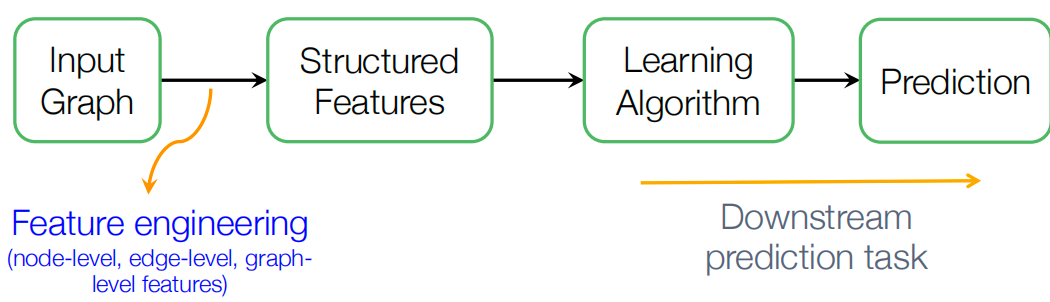
传统的图机器学习:
- 给定一个输入图,抽取节点、边和图级别特征, 学习一个能将这些特征映射到标签的模型(像SVM, NN…)
- 这个抽取不同级别特征的过程,就是特征工程feature engineering
- 学习到模型后拿来预测就是具体的下游预测任务
图表示学习可以减轻每次做特征工程的需求,自动的学习到特征。
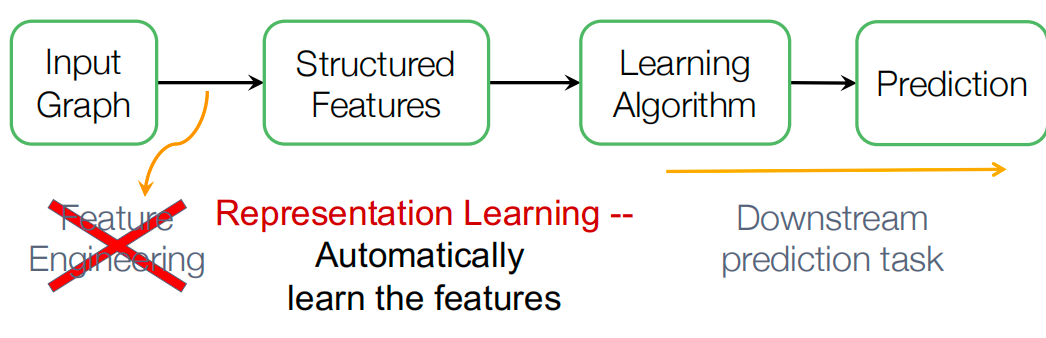
目标:图机器学习的高效的任务无关特征学习。对于图,要抽取到任务无关的的特征,这样下游任务不同也能用。
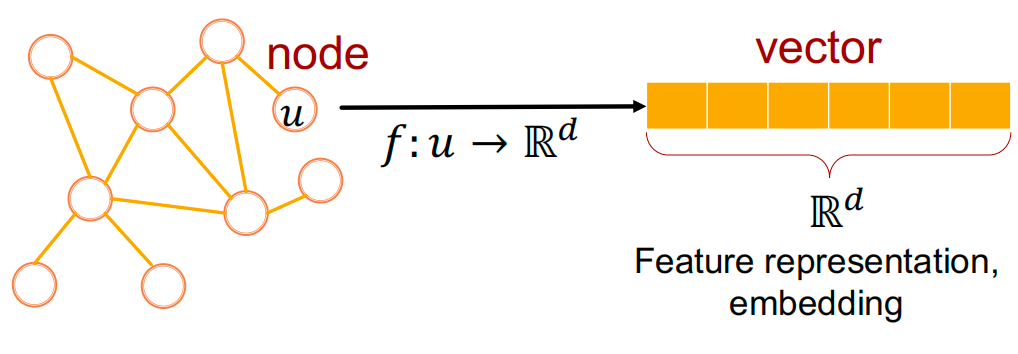
如上图,就是将节点 𝑢 ,经过函数 𝑓 , 映射成向量。这就是特征表示或者更具体地说是embedding。
为什么需要embedding?
-
可视化和理解:图结构通常是高维的,难以直接可视化。通过图嵌入,可以将节点映射到一个低维空间(通常是二维或三维),使得网络的结构和关系更容易被观察和理解。
-
相似性度量:在网络中,节点之间的相似性是一个重要的概念。通过图嵌入,可以将这种相似性转化为向量空间中的距离。节点的嵌入向量越接近,它们在网络中的行为和特征就越相似。这有助于识别网络中的社区结构或相似节点。
-
编码网络信息:图嵌入可以将网络的结构信息编码到向量中。这意味着节点的嵌入向量不仅包含了它们自身的信息,还包含了它们与网络中其他节点的关系。这对于理解节点在网络中的角色和功能至关重要。
-
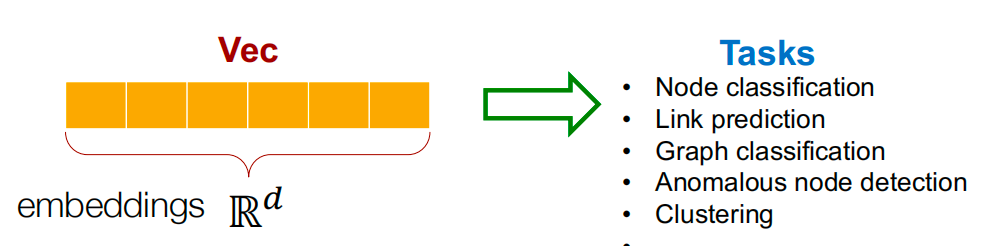
下游任务应用:图嵌入生成的向量可以作为输入特征,用于各种机器学习任务。
-
处理大规模数据:大规模图数据的处理和分析常常面临计算和存储的挑战。图嵌入可以将图数据转换为更紧凑的向量形式,从而减少存储需求和加速计算过程。
-
增强模型性能:在许多机器学习模型中,输入特征的质量和表示方式对模型性能有显著影响。图嵌入通过将图数据转换为向量,可以提高模型在处理图结构数据时的准确性和效率。
Encoder and Decoder
Setup
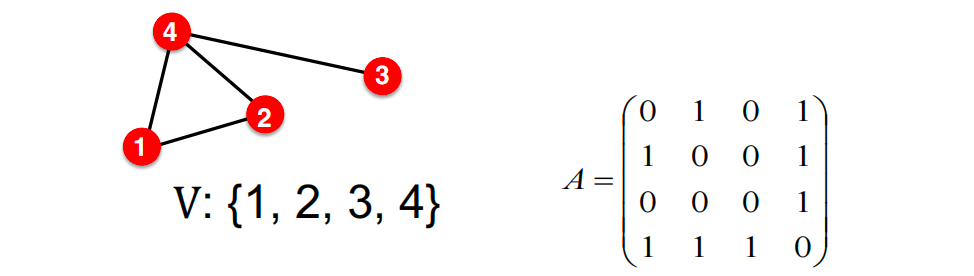
假设我们有一个无向图 G G G:
- V V V 是顶点集合。
- A A A 是邻接矩阵(假设为二进制)。
- 为简化起见:不使用节点特征或额外信息。
Node Embeddings
目标:编码节点,以便embedding space(如点积)中的相似度近似于图中的相似度。
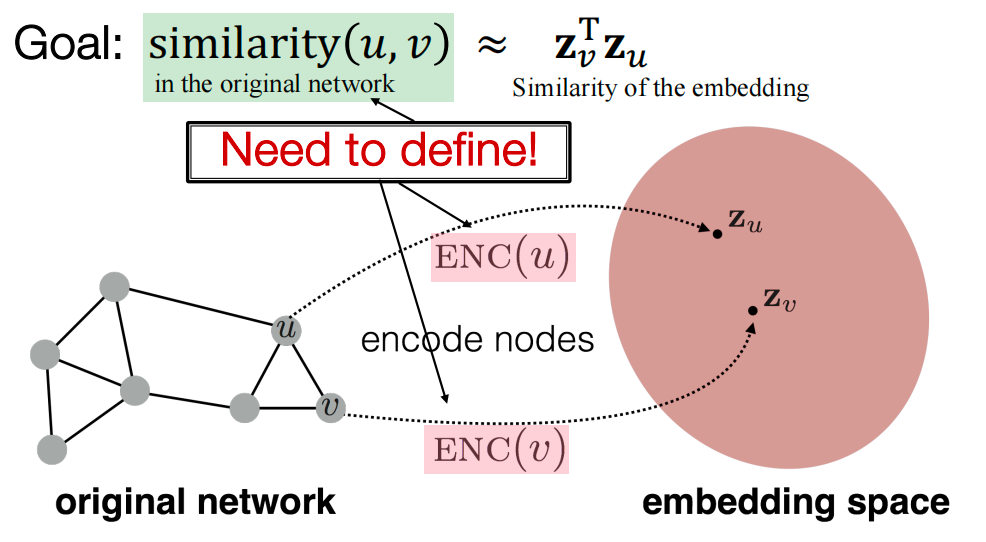
如上图中,原始的网络中的邻居节点u、v ,编码到embedding空间后,对应的 z u , z v \mathbf{z}_u, \mathbf{z}_v zu,zv 也要相近。
Learning Node Embeddings
过程:
-
编码器将节点映射到嵌入
-
定义一个节点相似性函数(即,在原始网络中的相似性度量)
-
解码器 D E C DEC DEC 将嵌入映射到相似性得分
-
优化编码器的参数,使得: similarity ( u , v ) ≈ z v T z u \text{similarity}(u, v)\approx \mathbf{z}_v^T\mathbf{z}_u similarity(u,v)≈zvTzu
Encoder: 映射每个节点到低维度向量。
相似度函数: 明确编码后向量空间和原始网络是怎样的映射关系,如上图,就是原始网络中u和v的相似度和这两个节点embedding后的点积是如何对应的。

Shallow Encoding
最简单的编码方法:编码器仅仅是一个嵌入查找。
ENC ( v ) = z v = Z ⋅ v \text{ENC}(v) = \mathbf{z}_v = \mathbf{Z} \cdot v ENC(v)=zv=Z⋅v,其中:
- Z ∈ R d × ∣ V ∣ \mathbf{Z} \in \mathbb{R}^{d \times |V|} Z∈Rd×∣V∣ 表示嵌入矩阵,每一列是一个节点的嵌入向量。
- v ∈ { 0 , 1 } ∣ V ∣ v \in \{0, 1\}^{|V|} v∈{0,1}∣V∣ 是指示向量,除了在第 v v v 列有一个1表示节点 v v v 外,其他位置都是0。

得到嵌入矩阵的方法有 DeepWalk, node2vec等。
Encoder + Decoder Framework
Shallow Encoding:嵌入查找
- 需要优化的参数: Z \mathbf{Z} Z,其中包含所有节点 u ∈ V u \in V u∈V 的节点嵌入 Z u \mathbf{Z}_u Zu
- 我们将在图神经网络(GNNs)中介绍 deep encoders
解码器:基于节点相似性
- 目标:对于相似的节点对 ( u , v ) (u, v) (u,v),最大化 z v T z u \mathbf{z}_v^T\mathbf{z}_u zvTzu
上述方法的关键点是怎么定义节点相似度 ?接下来将用随机游走来学习获得节点相似度,和怎样为该相似度指标优化embedding。
Random Walk Approaches for Node Embeddings
符号
向量
z
u
\mathbf{z}_u
zu:节点
u
u
u 的嵌入。
概率
P
(
v
∣
z
u
)
P(v \mid \mathbf{z}_u)
P(v∣zu):
- 基于 z u \mathbf{z}_u zu 的模型预测。
- 从节点 u u u 开始的随机游走中访问节点 v v v 的(预测)概率。
用于产生预测概率的非线性函数:
- Softmax 函数:将 K K K 个实值(模型预测)转换为 K K K 个总和为1的概率: S ( z ) [ i ] = e z [ i ] ∑ j = 1 K e z [ j ] S(\mathbf{z})[i] = \frac{e^{\mathbf{z}[i]}}{\sum_{j=1}^{K} e^{\mathbf{z}[j]}} S(z)[i]=∑j=1Kez[j]ez[i]。
- Sigmoid 函数:将实值转换为范围在 ( 0 , 1 ) (0, 1) (0,1) 内的S形函数,表示为 σ ( x ) = 1 1 + e − x \sigma(x) = \frac{1}{1 + e^{-x}} σ(x)=1+e−x1。
Random Walk
给定一个图和一个起始点,我们随机选择一个相邻点,然后移动到这个相邻点;接着我们随机选择这个点的一个相邻点,并移动到它,依此类推。这样访问点的(随机)序列是图上的随机游走(Random Walk)。
Random Walk Embeddings:
z
u
T
z
v
=
z
和
v
一起出现在图中的随机游走上的概率
\mathbf{z}_u^T\mathbf{z}_v = \mathbf{z}和\mathbf{v}一起出现在图中的随机游走上的概率
zuTzv=z和v一起出现在图中的随机游走上的概率
- 使用某种随机游走策略 R R R,从节点 u u u开始估计访问节点 v v v的概率 P R ( v ∣ u ) P_R(v|u) PR(v∣u)。
- 这个概率就是节点u和v的相似度,我们可以根据这个概率来优化embedding,在embedding空间的相似度,这里 dot product=cos(𝜃) ,就是编码的随机游走相似度。
优势:
- 可解释性:灵活的随机定义节点相似性,该定义结合了局部和更高阶邻域信息。
- 思想:如果从节点 α \alpha α开始的随机游走以高概率访问节点 β \beta β,则 α \alpha α和 β \beta β是相似的(高阶多跳信息)。
- 高效性:在训练时不需要考虑所有节点对;只需要考虑在随机游走中共同出现的对。
Unsupervised Feature Learning
直觉:在 d d d维空间中找到节点的嵌入,以保持相似性。
思路:学习节点嵌入,使得在网络中相邻的节点彼此靠近。
给定一个节点 u u u,我们如何定义相邻节点? N R ( u ) N_R(u) NR(u) … 通过某种随机游走策略 R R R获得的 u u u的邻域
给定图 G = ( V , E ) G = (V, E) G=(V,E),我们的目标是学习一个映射 f : u → R d f: u \rightarrow \mathbb{R}^d f:u→Rd: f ( u ) = z u f(u) = \mathbf{z}_u f(u)=zu
对数似然目标: arg max z ∑ u ∈ V log ( P ( N R ( u ) ∣ z u ) ) \text{arg max}_z\sum_{u \in V}\log \left( P(N_R(u) | \mathbf z_u) \right) arg maxz∑u∈Vlog(P(NR(u)∣zu))
- 其中 N R ( u ) N_R(u) NR(u)是通过策略 R R R得到的节点 u u u的邻域。给定节点 u u u,我们希望学习特征表示,这些表示能够预测其随机游走邻域 N R ( u ) N_R(u) NR(u)中的节点。
Random Walk Optimization
- 从图中的每个节点 u u u开始,使用某种随机游走策略 R R R运行短的固定长度随机游走。
- 对于每个节点 u u u,收集 N R ( u ) N_R(u) NR(u),即从 u u u开始的随机游走中访问的节点的多重集。
- 根据以下方式优化嵌入:给定节点 u u u,预测其邻居 N R ( u ) N_R(u) NR(u)。
等价地,$ \arg\min_z \mathcal{L} = \sum_{u \in V} \sum_{v \in N_R(u)}-\log(P(v \mid z_u)) $
直觉:优化嵌入 z u z_u zu以最小化随机游走邻域 N ( u ) N(u) N(u)的负对数似然。
使用softmax参数化
P
(
v
∣
z
u
)
P(v \mid z_u)
P(v∣zu):
P
(
v
∣
z
u
)
=
exp
(
z
u
T
z
v
)
∑
n
exp
(
z
u
T
z
n
)
P(v \mid \mathbf {z}_u) = \frac{\exp(\mathbf {z}_u^T \mathbf {z}_v)}{\sum_{n} \exp(\mathbf {z}_u^T \mathbf {z}_n)}
P(v∣zu)=∑nexp(zuTzn)exp(zuTzv)
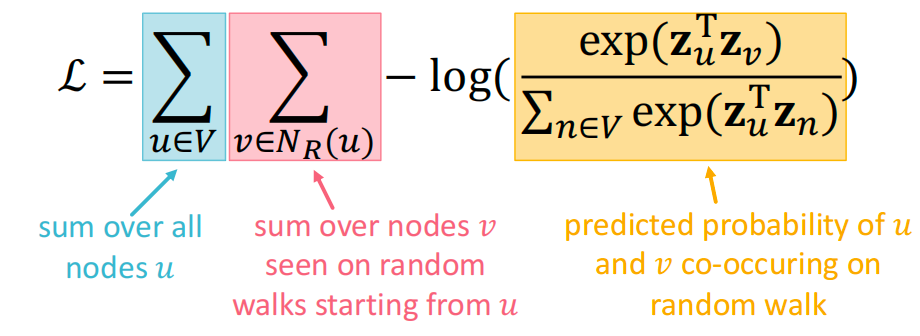
计算复杂度高: O ( ∣ V ∣ 2 ) O(|V|^2) O(∣V∣2)
解决方法: 负采样。这里将softmax替换为sigmoid, 近似得到:
−
log
(
exp
(
z
u
T
z
v
)
∑
n
exp
(
z
u
T
z
n
)
)
≈
log
(
σ
(
z
u
T
z
v
)
)
+
∑
i
=
1
k
log
(
σ
(
−
z
u
T
z
n
i
)
)
,
n
i
∼
P
V
-\log \left(\frac{\exp(\mathbf {z}_u^T \mathbf {z}_v)}{\sum_{n} \exp(\mathbf {z}_u^T \mathbf {z}_n)}\right)\approx\\ \log \left(\sigma\left(\mathbf{z}_u^{\mathrm{T}} \mathbf{z}_v\right)\right)+\sum_{i=1}^k \log \left(\sigma\left(-\mathbf{z}_u^{\mathrm{T}} \mathbf{z}_{n_i}\right)\right),n_i \sim P_V
−log(∑nexp(zuTzn)exp(zuTzv))≈log(σ(zuTzv))+i=1∑klog(σ(−zuTzni)),ni∼PV
负采样就是将分母归一化部分中所有节点 𝑛 替换为随机采样得到的 k个负样本
n
i
n_i
ni ,即不在random walk上的样本.
对于k(负样本数量)的两个考虑:
- 更高的k值提供更稳健的估计
- 更高的k值对应于对负事件的更高偏差:实践中k值通常为5到20。
- 负样本可以是任意节点还是仅限于不在游走中的节点?人们通常采样任意节点(出于效率考虑)。
使用随机梯度下降优化目标:
L
=
∑
u
∈
V
∑
v
∈
N
R
(
u
)
−
log
(
P
(
v
∣
z
u
)
)
\mathcal{L} = \sum_{u \in V} \sum_{v \in N_R(u)}-\log(P(v \mid \mathbf{z}_u))
L=u∈V∑v∈NR(u)∑−log(P(v∣zu))
应该使用什么策略进行随机游走呢?最简单的想法:直接固定长度,每个节点都无偏的随机游走。 但问题是这样的策略使得相似度有非常大的局限性。2014DeepWalk:https://arxiv.org/pdf/1403.6652
Node2Vec
2016node2vec:https://cs.stanford.edu/~jure/pubs/node2vec-kdd16.pdf
- 目标:将具有相似网络邻域的节点嵌入到特征空间中靠近的位置。
我们将这个目标构建为一个最大似然优化问题,独立于下游预测任务。 - 关键观察:灵活的网络邻域 N r ( u ) N_r(u) Nr(u)的概念导致丰富的节点嵌入。
- 开发有偏的二阶随机游走 R R R来生成节点 u u u的网络邻域 N R ( u ) N_R(u) NR(u)。
思想:使用稳定的有偏随机游走来权衡网络的局部和全局视图。
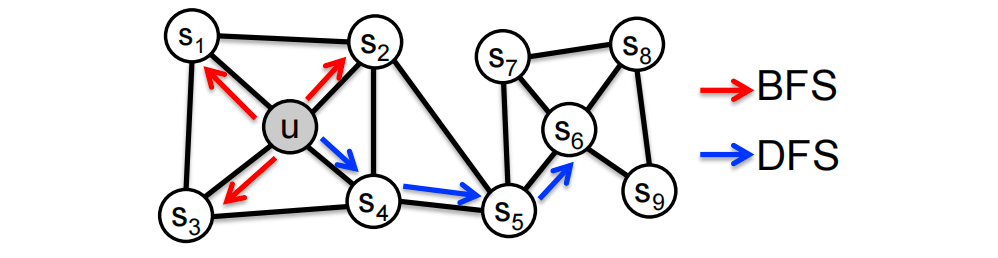
长度为3的游走( N R ( u ) N_R(u) NR(u)的大小为3):
- N B F S ( u ) = { S 1 , S 2 , S 3 } N_{BFS}(u) = \{ S_1, S_2, S_3 \} NBFS(u)={S1,S2,S3}:局部微观视角
- N D F S ( u ) = { S 4 , S 5 , S 6 } N_{DFS}(u) = \{ S_4, S_5, S_6 \} NDFS(u)={S4,S5,S6}:全局宏观视角
给定节点 u u u生成邻域 N R ( u ) N_R(u) NR(u)的有偏固定长度随机游走 R R R。随机游走有两个参数:
- 返回参数 p p p:返回前一个节点
- 进出参数 q q q:从前一个节点向外(深度优先搜索DFS)与向内(广度优先搜索BFS)移动:直观上, q q q是BFS与DFS的“比例”
接下来,我们指定如何执行有偏随机游走的单步。随机游走就是这些步骤的序列。
Biased Random Walk
有偏的2阶随机游走探索网络邻居节点:
-
假设通过边 ( s 1 , w ) (s_1,w) (s1,w) 到达 w w w 节点
-
那么现在w节点的邻居节点可能是 s 1 , s 2 , s 3 s_1,s_2,s_3 s1,s2,s3 。这跟最开始的起点 s 1 s_1 s1 的意义是不一样的。
-
通过边 ( s 1 , w ) (s_1,w) (s1,w)走到 w w w 节点,下一步跳到哪? 如图跳到下一个节点的的概率是不一样的。(注意, 1 / p 1/p 1/p, 1 / q 1/q 1/q,1 不是归一化的概率,加起来和不为1)
-
p p p, q q q是模型的转移概率。
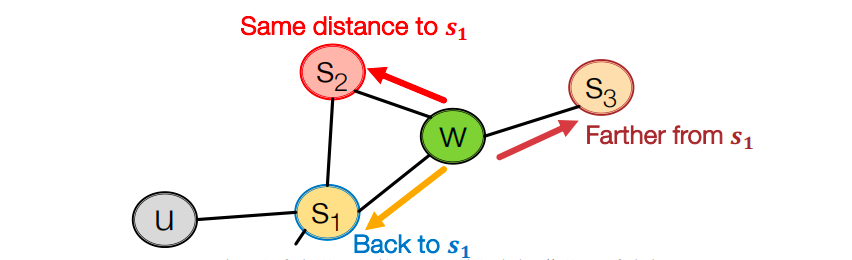
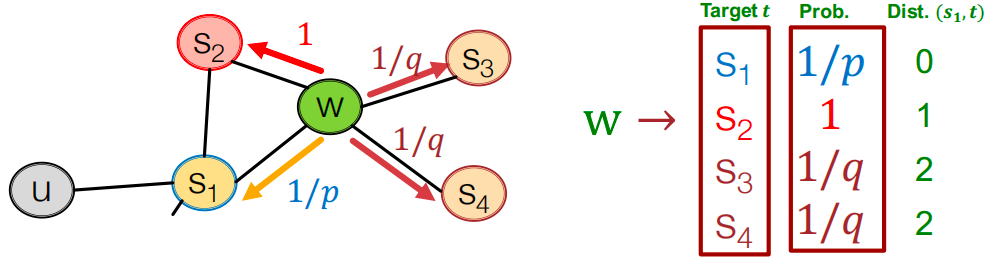
如上图所示,前一步通过边 ( s 1 , w ) (s_1, w) (s1,w)到达节点 w w w。现在走到的节点 w w w,邻居节点有 s 1 s_1 s1, s 2 s_2 s2, s 3 s_3 s3, s 4 s_4 s4。具体怎么设计 p p p, q q q概率呢?
根据上一跳节点和下一跳节点的距离设计,说到距离,就要明确这两点在哪?上一跳节点为 s 1 s_1 s1,下一跳为 s 1 , s 2 , s 3 , s 4 s_1, s_2, s_3, s_4 s1,s2,s3,s4。
论文中提到:
α
p
q
(
t
,
x
)
=
{
1
p
if
d
t
x
=
0
1
if
d
t
x
=
1
1
q
if
d
t
x
=
2
\alpha_{p q}(t, x)= \begin{cases}\frac{1}{p} & \text { if } d_{t x}=0 \\ 1 & \text { if } d_{t x}=1\\ \frac{1}{q} & \text { if } d_{t x}=2 \end{cases}
αpq(t,x)=⎩
⎨
⎧p11q1 if dtx=0 if dtx=1 if dtx=2
t
t
t表示上一跳节点,
x
x
x表示未来要走的节点,
d
t
x
d_{tx}
dtx表示这两个节点之间的距离。所以上图中的转移概率如下:
- 类似BFS的游走:较小的p值,那么 1/𝑝 就较大,会回到上一跳节点。
- 类似DFS的游走:较小的q值,会往跟上一跳较远的距离跳。
Algorithm
- 计算边的转移概率:对于每条边 ( s i , w ) (s_i, w) (si,w),我们计算基于 p , q p, q p,q的边游走概率 ( w , ⋅ ) (w,\cdot) (w,⋅)。
- 模拟从每个节点 u u u 开始长度为 l l l 的 r r r 次随机游走。
- 使用随机梯度下降优化node2vec目标。(目标和上面的一样)
线性时间复杂度:所有3个步骤都可以单独并行化。
Summary
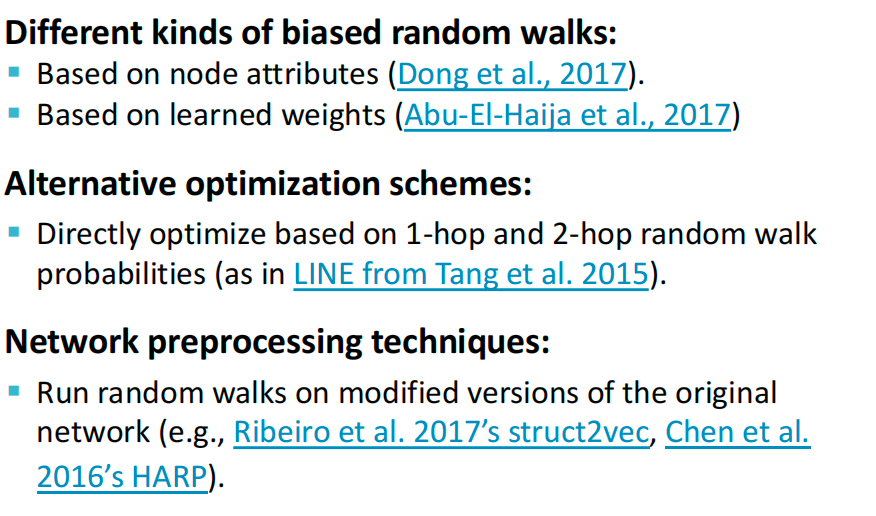
- 没有一种方法在所有情况下都是最优的。例如,node2vec在节点分类上表现更好,而其他方法在链接预测上表现更好。
- 随机游走方法通常更有效率。
- 一般来说:必须选择与你的应用程序匹配的节点相似性定义。
Embedding Entire Graphs
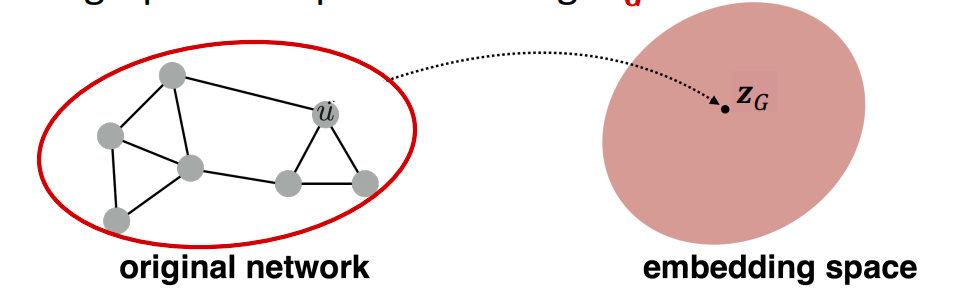
- 目标:把一个子图或者一张图嵌入到特征空间去,得到图的embedding: z G \mathbf{z}_G zG
- 具体任务:对有毒和无毒分子分类;鉴别异常的图
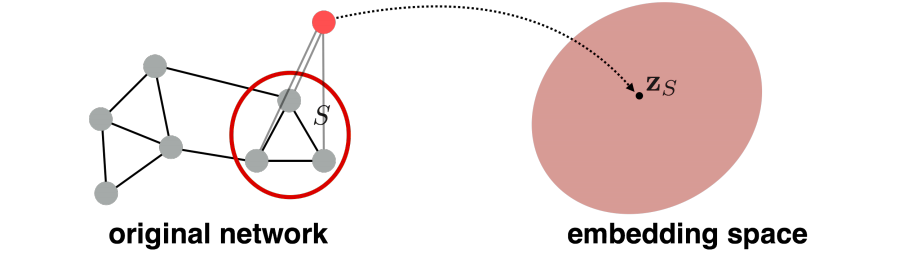
方法1
简单(但有效)的方法1:https://arxiv.org/abs/1509.09292
在(子)图
G
G
G上运行标准图嵌入技术。然后只需将(子)图
G
G
G中的节点嵌入求和(或平均)。
z
G
=
∑
v
∈
G
z
v
\mathbf{z}_G = \sum_{v \in G} \mathbf{z}_v
zG=v∈G∑zv
方法2
引入一个”虚拟节点“来表示子图,然后再对其用node embedding。https://arxiv.org/abs/1511.05493
Matrix Factorization and Node Embeddings
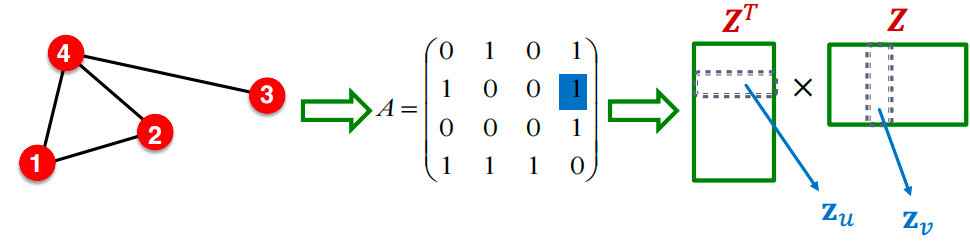
回忆:编码器是一个嵌入查找。
ENC ( v ) = z v = Z ⋅ v \text{ENC}(v) = \mathbf{z}_v = \mathbf{Z} \cdot v ENC(v)=zv=Z⋅v,其中:
- Z ∈ R d × ∣ V ∣ \mathbf{Z} \in \mathbb{R}^{d \times |V|} Z∈Rd×∣V∣ 表示嵌入矩阵,每一列是一个节点的嵌入向量。
- v ∈ { 0 , 1 } ∣ V ∣ v \in \{0, 1\}^{|V|} v∈{0,1}∣V∣ 是指示向量,除了在第 v v v 列有一个1表示节点 v v v 外,其他位置都是0。
最简单的节点相似性:如果节点 u u u和 v v v由一条边连接,它们就是相似的,这对应于图邻接矩阵 A A A中的 ( u , v ) (u, v) (u,v)项。因此, Z T Z = A \mathbf{Z}^T \mathbf{Z} = A ZTZ=A。
嵌入维度 d d d(矩阵 Z Z Z 的行数)远小于节点数 n n n。精确分解 A = Z T Z A = Z^T Z A=ZTZ 通常是不可能的。然而,我们可以近似学习 Z Z Z。
- 我们优化 Z Z Z 以最小化 A − Z T Z A - Z^T Z A−ZTZ 的 L 2 L2 L2 范数(Frobenius范数)。
- 注意今天使用了softmax而不是 L 2 L2 L2。但用 Z T Z Z^T Z ZTZ 近似 A A A 的目标是相同的。
- 结论:内积解码器,其中节点相似性由边连接性定义,等同于矩阵 A A A 的分解。
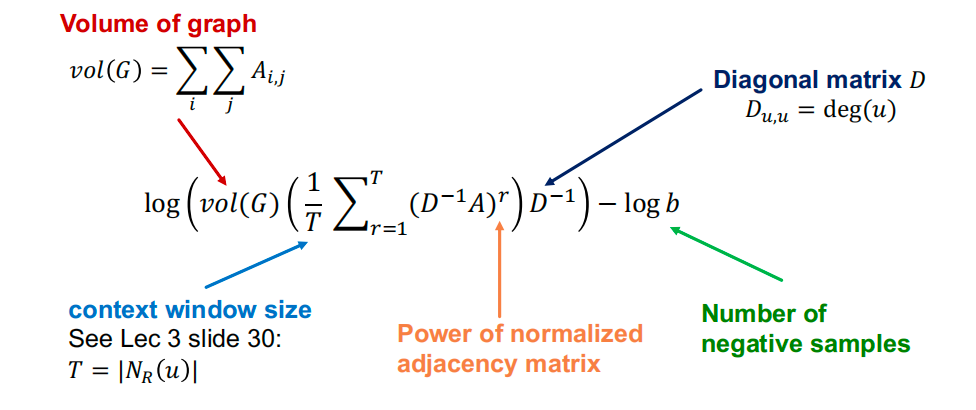
DeepWalk 等同于以下复杂矩阵表达式的矩阵分解:https://keg.cs.tsinghua.edu.cn/jietang/publications/WSDM18-Qiu-et-al-NetMF-network-embedding.pdf
log
(
vol
(
G
)
(
1
T
∑
r
=
1
T
(
D
−
1
A
)
r
)
D
−
1
)
−
log
b
\log \left(\operatorname{vol}(G)\left(\frac{1}{T} \sum_{r=1}^T\left(D^{-1} A\right)^r\right) D^{-1}\right )-\log b
log(vol(G)(T1r=1∑T(D−1A)r)D−1)−logb
总结与局限
怎么使用节点的embeddings z i \mathbf{z}_i zi :
- 聚类/社区发现: 聚类 z i \mathbf{z}_i zi点
- 节点分类:基于 z i \mathbf{z}_i zi预测节点i的标签
- 边预测: 基于 ( z i , z j ) (\mathbf{z}_i,\mathbf{z}_j) (zi,zj) 预测边 ( i , j ) (i,j) (i,j) , 可以通过平均点积等方法 求embeddings的差值
- 图预测:通过聚合节点embeddings或虚拟节点游走获得的图embedding z G \pmb z_G zG 来预测图的标签
局限性:
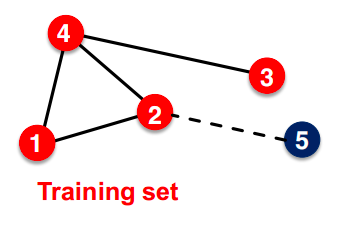
- 无法为训练集中不存在的节点获得嵌入。无法应用于新图、演化图:测试时新增节点5(例如,社交网络中的新用户)。无法使用DeepWalk或node2vec计算其嵌入。需要重新计算所有节点嵌入。
- 无法捕捉结构相似性。节点1和11在结构上相似 : 都是一个三角形的一部分,度数为2。然而,它们具有非常不同的嵌入。
从节点1随机游走到节点11的可能性很小。DeepWalk和node2vec没有捕捉到结构相似性。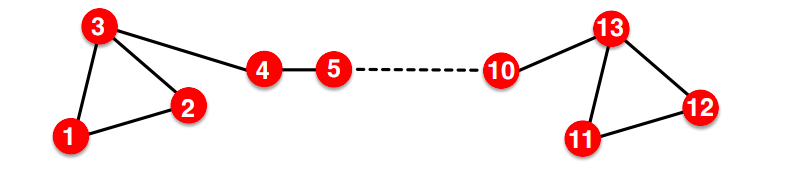
- 无法利用节点、边和图特征。特征向量(例如,在蛋白质-蛋白质交互图中的蛋白质属性)。DeepWalk/node2vec嵌入没有结合这些节点特征。解决这些限制的方案:深度表示学习和图神经网络。
参考资料
- CS224W笔记-3-1. Node Embeddings - aigonna的文章 - 知乎https://zhuanlan.zhihu.com/p/486094620
- https://web.stanford.edu/class/cs224w/




![UPLOAD-LABS靶场[超详细通关教程,通关攻略]](https://img-blog.csdnimg.cn/img_convert/a38ba0e5c19a9cbccf68dd9a17f16880.png)









![[tomato]靶机复现漏洞详解!](https://img-blog.csdnimg.cn/img_convert/58152da008ed04e5a29fd15a8accb883.png)


![[ WARN:0@0.014] global loadsave.cpp:248 cv::findDecoder imread_](https://img-blog.csdnimg.cn/direct/df413fc3bbea46f7962bc7fe31fa6a01.png)
