秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
专栏目录 :《YOLOv8改进有效涨点》专栏介绍 & 专栏目录 | 目前已有50+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进——点击即可跳转
本文介绍了一种基于注意力尺度序列融合的一阶段目标检测框架(ASF-YOLO),该框架结合了空间和尺度特征,用于准确快速的细胞实例分割。在YOLO分割框架的基础上,我们采用了尺度序列特征融合(SSFF)模块来增强网络的多尺度信息提取能力,以及三级特征编码(TFE)模块来融合不同尺度的特征图,以增加详细信息。我们进一步引入了通道和位置注意力机制(CPAM),以整合SSFF和TFE模块,该机制专注于信息丰富的通道和与空间位置相关的小物体,以提升检测和分割性能。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。对于学有余力的同学,可以挑战进阶模块。文章内容丰富,可以帮助您更好地面对深度学习目标检测YOLO系列的挑战。
专栏地址:YOLOv8改进——更新各种有效涨点方法——点击即可跳转
目录
1. 原理
2. ASF-YOLO代码实现
2.1 将ASF-YOLO添加到YOLOv8中
2.2 更改init.py文件
2.3 添加yaml文件
2.4 在task.py中进行注册
2.5 执行程序
3. 完整代码分享
4. GFLOPs
5.进阶
6.总结
1. 原理

论文地址:ASF-YOLO: A Novel YOLO Model with Attentional Scale Sequence Fusion for Cell Instance Segmentation——点击即可跳转
官方代码:官方代码仓库——点击即可跳转
ASF-YOLO是一种基于YOLO(You Only Look Once)框架的改进模型,专门用于细胞实例分割。它通过结合空间和尺度特征,提供了更准确和快速的细胞实例分割。ASF-YOLO的主要原理包括以下几个方面:
1. YOLO框架的基础结构
ASF-YOLO基于YOLO框架,该框架包括三个主要部分:骨干网络(backbone)、颈部网络(neck)和头部网络(head)。其中,骨干网络负责在不同粒度上提取图像特征,颈部网络进行多尺度特征融合,头部网络则用于目标的边界框预测和分割掩码生成。
2. 规模序列特征融合模块(SSFF)
ASF-YOLO引入了SSFF模块,该模块通过归一化、上采样和多尺度特征的3D卷积,结合了不同尺度的全局语义信息。这种方法有效地处理了不同大小、方向和长宽比的物体,提升了分割性能。
3. 三重特征编码器模块(TFE)
TFE模块融合了不同尺度(大、中、小)的特征图,捕捉了小物体的细节信息。通过将这些详细特征整合到每个特征分支中,TFE模块增强了对密集细胞的小物体检测能力。
4. 通道和位置注意力机制(CPAM)
CPAM模块集成了来自SSFF和TFE模块的特征信息。它通过适应性地调整对相关通道和空间位置的关注,提高了小物体的检测和分割精度。
5. 高效的损失函数和后处理方法
ASF-YOLO在训练阶段使用了EIoU(Enhanced Intersection over Union)损失函数,该函数比传统的CIoU(Complete IoU)更能捕捉小物体的位置关系。此外,ASF-YOLO还在后处理阶段采用了软非极大值抑制(Soft-NMS),进一步改善了密集重叠细胞的检测问题。
结论
ASF-YOLO通过引入SSFF、TFE和CPAM模块,优化了YOLO框架在细胞实例分割中的性能,使其在处理小、密集和重叠物体时表现出色。这些创新使得ASF-YOLO在医学图像分析和细胞生物学领域具有广泛的应用潜力。
2. ASF-YOLO代码实现
2.1 将ASF-YOLO添加到YOLOv8中
关键步骤一: 将下面代码粘贴到在/ultralytics/ultralytics/nn/modules/block.py中,并在该文件的__all__中添加['Zoom_cat', 'ScalSeq', 'Add', 'channel_att', 'attention_model']
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
def autopad(k, p=None, d=1): # kernel, padding, dilation
# Pad to 'same' shape outputs
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
# Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
return self.act(self.conv(x))
class Zoom_cat(nn.Module):
def __init__(self):
super().__init__()
# self.conv_l_post_down = Conv(in_dim, 2*in_dim, 3, 1, 1)
def forward(self, x):
"""l,m,s表示大中小三个尺度,最终会被整合到m这个尺度上"""
l, m, s = x[0], x[1], x[2]
tgt_size = m.shape[2:]
l = F.adaptive_max_pool2d(l, tgt_size) + F.adaptive_avg_pool2d(l, tgt_size)
# l = self.conv_l_post_down(l)
# m = self.conv_m(m)
# s = self.conv_s_pre_up(s)
s = F.interpolate(s, m.shape[2:], mode='nearest')
# s = self.conv_s_post_up(s)
lms = torch.cat([l, m, s], dim=1)
return lms
class ScalSeq(nn.Module):
def __init__(self, inc, channel):
super(ScalSeq, self).__init__()
self.conv0 = Conv(inc[0], channel, 1)
self.conv1 = Conv(inc[1], channel, 1)
self.conv2 = Conv(inc[2], channel, 1)
self.conv3d = nn.Conv3d(channel, channel, kernel_size=(1, 1, 1))
self.bn = nn.BatchNorm3d(channel)
self.act = nn.LeakyReLU(0.1)
self.pool_3d = nn.MaxPool3d(kernel_size=(3, 1, 1))
def forward(self, x):
p3, p4, p5 = x[0], x[1], x[2]
p3 = self.conv0(p3)
p4_2 = self.conv1(p4)
p4_2 = F.interpolate(p4_2, p3.size()[2:], mode='nearest')
p5_2 = self.conv2(p5)
p5_2 = F.interpolate(p5_2, p3.size()[2:], mode='nearest')
p3_3d = torch.unsqueeze(p3, -3)
p4_3d = torch.unsqueeze(p4_2, -3)
p5_3d = torch.unsqueeze(p5_2, -3)
combine = torch.cat([p3_3d, p4_3d, p5_3d], dim=2)
conv_3d = self.conv3d(combine)
bn = self.bn(conv_3d)
act = self.act(bn)
x = self.pool_3d(act)
x = torch.squeeze(x, 2)
return x
class Add(nn.Module):
# Concatenate a list of tensors along dimension
def __init__(self, ch=256):
super().__init__()
def forward(self, x):
input1, input2 = x[0], x[1]
x = input1 + input2
return x
class channel_att(nn.Module):
def __init__(self, channel, b=1, gamma=2):
super(channel_att, self).__init__()
kernel_size = int(abs((math.log(channel, 2) + b) / gamma))
kernel_size = kernel_size if kernel_size % 2 else kernel_size + 1
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.conv = nn.Conv1d(1, 1, kernel_size=kernel_size, padding=(kernel_size - 1) // 2, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
y = self.avg_pool(x)
y = y.squeeze(-1)
y = y.transpose(-1, -2)
y = self.conv(y).transpose(-1, -2).unsqueeze(-1)
y = self.sigmoid(y)
return x * y.expand_as(x)
class local_att(nn.Module):
def __init__(self, channel, reduction=16):
super(local_att, self).__init__()
self.conv_1x1 = nn.Conv2d(in_channels=channel, out_channels=channel // reduction, kernel_size=1, stride=1,
bias=False)
self.relu = nn.ReLU()
self.bn = nn.BatchNorm2d(channel // reduction)
self.F_h = nn.Conv2d(in_channels=channel // reduction, out_channels=channel, kernel_size=1, stride=1,
bias=False)
self.F_w = nn.Conv2d(in_channels=channel // reduction, out_channels=channel, kernel_size=1, stride=1,
bias=False)
self.sigmoid_h = nn.Sigmoid()
self.sigmoid_w = nn.Sigmoid()
def forward(self, x):
_, _, h, w = x.size()
x_h = torch.mean(x, dim=3, keepdim=True).permute(0, 1, 3, 2)
x_w = torch.mean(x, dim=2, keepdim=True)
x_cat_conv_relu = self.relu(self.bn(self.conv_1x1(torch.cat((x_h, x_w), 3))))
x_cat_conv_split_h, x_cat_conv_split_w = x_cat_conv_relu.split([h, w], 3)
s_h = self.sigmoid_h(self.F_h(x_cat_conv_split_h.permute(0, 1, 3, 2)))
s_w = self.sigmoid_w(self.F_w(x_cat_conv_split_w))
out = x * s_h.expand_as(x) * s_w.expand_as(x)
return out
class attention_model(nn.Module):
# Concatenate a list of tensors along dimension
def __init__(self, ch=256):
super().__init__()
self.channel_att = channel_att(ch)
self.local_att = local_att(ch)
def forward(self, x):
input1, input2 = x[0], x[1]
input1 = self.channel_att(input1)
x = input1 + input2
x = self.local_att(x)
return x
2.2 更改init.py文件
关键步骤二:修改modules文件夹下的__init__.py文件,先导入函数

然后在下面的__all__中声明函数

2.3 添加yaml文件
关键步骤三:在/ultralytics/ultralytics/cfg/models/v8下面新建文件yolov8_ASF.yaml文件,粘贴下面的内容
- 改进一
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, Conv, [512, 1, 1]] # 10
- [4, 1, Conv, [512, 1, 1]] # 11
- [[-1, 6, -2], 1, Zoom_cat, []] # 12 cat backbone P4
- [-1, 3, C2f, [512]] # 13
- [-1, 1, Conv, [256, 1, 1]] # 14
- [2, 1, Conv, [256, 1, 1]] # 15
- [[-1, 4, -2], 1, Zoom_cat, []] # 16 cat backbone P3
- [-1, 3, C2f, [256]] # 17 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 18
- [[-1, 14], 1, Concat, [1]] # 19 cat head P4
- [-1, 3, C2f, [512]] # 20 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 21
- [[-1, 10], 1, Concat, [1]] # 22 cat head P5
- [-1, 3, C2f, [1024]] # 23 (P5/32-large)
- [[4, 6, 8], 1, ScalSeq, [256]] # 24 args[inchane]
- [[17, -1], 1, Add, [64]] # 25
- [[25, 20, 23], 1, Detect, [nc]] # RTDETRDecoder(P3, P4, P5)- 改进二
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, Conv, [512, 1, 1]] # 10
- [4, 1, Conv, [512, 1, 1]] # 11
- [[-1, 6, -2], 1, Zoom_cat, []] # 12 cat backbone P4
- [-1, 3, C2f, [512]] # 13
- [-1, 1, Conv, [256, 1, 1]] # 14
- [2, 1, Conv, [256, 1, 1]] # 15
- [[-1, 4, -2], 1, Zoom_cat, []] # 16 cat backbone P3
- [-1, 3, C2f, [256]] # 17 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 18
- [[-1, 14], 1, Concat, [1]] # 19 cat head P4
- [-1, 3, C2f, [512]] # 20 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 21
- [[-1, 10], 1, Concat, [1]] # 22 cat head P5
- [-1, 3, C2f, [1024]] # 23 (P5/32-large)
- [[4, 6, 8], 1, ScalSeq, [256]] # 24 args[inchane]
- [[17, -1], 1, attention_model, [256]] # 25
- [[25, 20, 23], 1, Detect, [nc]] # RTDETRDecoder(P3, P4, P5)温馨提示:本文只是对yolov8基础上添加模块,如果要对yolov8n/l/m/x进行添加则只需要指定对应的depth_multiple 和 width_multiple。
# YOLOv8n
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
# YOLOv8s
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# YOLOv8l
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# YOLOv8m
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
# YOLOv8x
depth_multiple: 1.33 # model depth multiple
width_multiple: 1.25 # layer channel multiple2.4 在task.py中进行注册
关键步骤四:在task.py的parse_model函数中进行注册

elif m is Zoom_cat:
c2 = sum(ch[x] for x in f)
elif m is Add:
c2 = ch[f[-1]]
elif m is ScalSeq:
c1 = [ch[x] for x in f]
c2 = make_divisible(args[0] * width, 8)
args = [c1, c2]
elif m is attention_model:
args = [ch[f[-1]]]2.5 执行程序
关键步骤五:在ultralytics文件中新建train.py,将model的参数路径设置为yolov8_ASF.yaml的路径即可
建议大家写绝对路径,确保一定能找到
from ultralytics import YOLO
# Load a model
# model = YOLO('yolov8n.yaml') # build a new model from YAML
# model = YOLO('yolov8n.pt') # load a pretrained model (recommended for training)
model = YOLO(r'/projects/ultralytics/ultralytics/cfg/models/v8/yolov8_ASF.yaml') # build from YAML and transfer weights
# Train the model
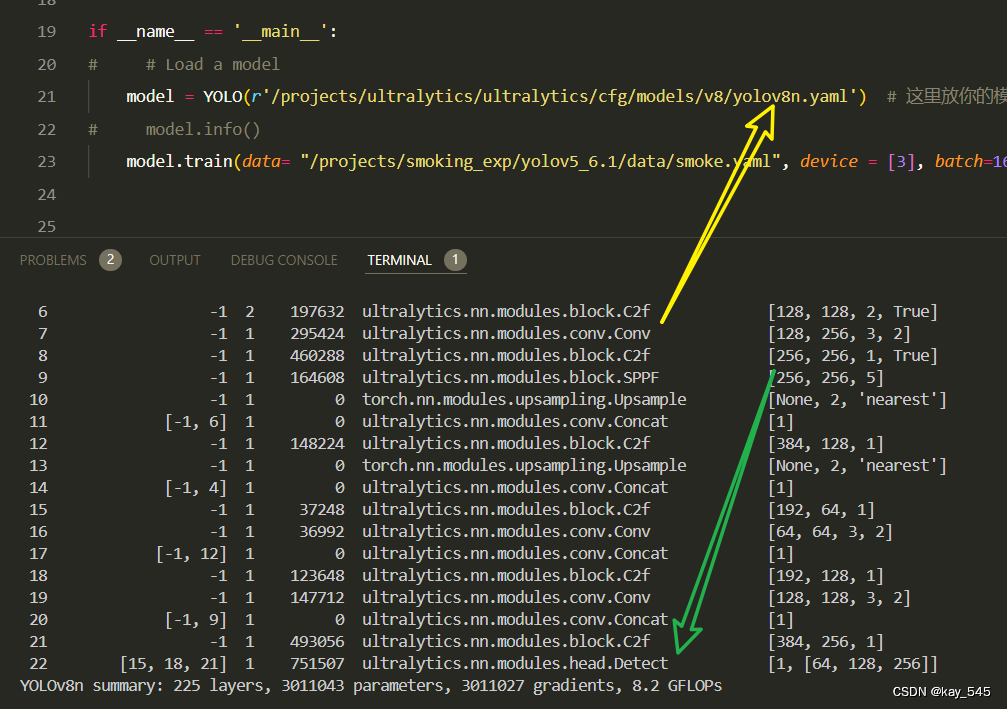
model.train(batch=16)🚀运行程序,如果出现下面的内容则说明添加成功🚀
from n params module arguments
0 -1 1 464 ultralytics.nn.modules.conv.Conv [3, 16, 3, 2]
1 -1 1 4672 ultralytics.nn.modules.conv.Conv [16, 32, 3, 2]
2 -1 1 7360 ultralytics.nn.modules.block.C2f [32, 32, 1, True]
3 -1 1 18560 ultralytics.nn.modules.conv.Conv [32, 64, 3, 2]
4 -1 2 49664 ultralytics.nn.modules.block.C2f [64, 64, 2, True]
5 -1 1 73984 ultralytics.nn.modules.conv.Conv [64, 128, 3, 2]
6 -1 2 197632 ultralytics.nn.modules.block.C2f [128, 128, 2, True]
7 -1 1 295424 ultralytics.nn.modules.conv.Conv [128, 256, 3, 2]
8 -1 1 460288 ultralytics.nn.modules.block.C2f [256, 256, 1, True]
9 -1 1 164608 ultralytics.nn.modules.block.SPPF [256, 256, 5]
10 -1 1 33024 ultralytics.nn.modules.conv.Conv [256, 128, 1, 1]
11 4 1 8448 ultralytics.nn.modules.conv.Conv [64, 128, 1, 1]
12 [-1, 6, -2] 1 0 ultralytics.nn.modules.block.Zoom_cat []
13 -1 1 148224 ultralytics.nn.modules.block.C2f [384, 128, 1]
14 -1 1 8320 ultralytics.nn.modules.conv.Conv [128, 64, 1, 1]
15 2 1 2176 ultralytics.nn.modules.conv.Conv [32, 64, 1, 1]
16 [-1, 4, -2] 1 0 ultralytics.nn.modules.block.Zoom_cat []
17 -1 1 37248 ultralytics.nn.modules.block.C2f [192, 64, 1]
18 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
19 [-1, 14] 1 0 ultralytics.nn.modules.conv.Concat [1]
20 -1 1 115456 ultralytics.nn.modules.block.C2f [128, 128, 1]
21 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
22 [-1, 10] 1 0 ultralytics.nn.modules.conv.Concat [1]
23 -1 1 460288 ultralytics.nn.modules.block.C2f [256, 256, 1]
24 [4, 6, 8] 1 33344 ultralytics.nn.modules.block.ScalSeq [[64, 128, 256], 64]
25 [17, -1] 1 0 ultralytics.nn.modules.block.Add [64]
26 [25, 20, 23] 1 751507 ultralytics.nn.modules.head.Detect [1, [64, 128, 256]]
YOLOv8_ASF summary: 252 layers, 3,055,395 parameters, 3,055,379 gradients, 8.7 GFLOPs3. 完整代码分享
https://pan.baidu.com/s/12QFr3ntMIYv7Ni88AwAtRA?pwd=c8k6提取码: c8k6
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识——Convolution
未改进的YOLOv8n GFLOPs
改进后的GFLOPs

5.进阶
可以结合损失函数和注意力机制进行改进
6.总结
ASF-YOLO是一种基于YOLO(You Only Look Once)框架的改进模型,专门用于细胞实例分割。其主要原理包括利用CSPDarknet53骨干网络进行多尺度特征提取,然后通过规模序列特征融合模块(SSFF)和三重特征编码器模块(TFE)进行多尺度和细节特征的融合。该模型还引入了通道和位置注意力机制(CPAM),通过适应性地调整对相关通道和空间位置的关注,增强了小物体的检测和分割能力。在检测和分割阶段,ASF-YOLO使用增强的EIoU损失函数优化边界框的位置关系,并通过头部网络生成分割掩码。最后,在后处理阶段,ASF-YOLO采用软非极大值抑制(Soft-NMS)方法处理密集重叠的检测框,从而提高检测精度和分割性能。通过这些创新,ASF-YOLO在医学图像分析和细胞实例分割任务中表现出色。