目录
概述
气动点焊焊枪运动状态设置
机器人气动点焊焊枪工具类型定义
气动点焊焊枪运动状态切换原理
气动点焊焊枪大开与小开状态切换设置
机器人仿真运行
概述
工业机器人点焊焊接过程中,为了提高焊接效率、优化焊接节拍、降低能源消耗,通常会在机器人走过渡点程序时,根据干涉情况来调整气动点焊焊枪的大开、小开运动状态,而不是让焊枪一直处于大开运动状态,这样在焊接过程中就能够适当地缩短焊枪运动行程,从而加快机器人的焊接速度、缩短焊接周期。
在使用PDPS软件进行机器人点焊焊接虚拟仿真时,同样需要调整气动点焊焊枪的大开、小开运动状态,以达到逼真的仿真效果,并输出有效的仿真数据。
气动点焊焊枪运动状态设置
PDPS软件中要实现在机器人程序中自动控制气动点焊焊枪大开与小开运动状态的自动切换,那么就必须事先设置好焊枪模型的运动状态。
将焊枪模型切换为可编辑状态,首先制作好焊枪的运动机构,然后设置焊枪的运动状态。
左侧的对象浏览树(Object Tree)中点选气动点焊焊枪模型,在软件“Modeling”菜单栏下的“Kinematic Device”命令组中点击“Pose Editor”命令按钮,弹出Pose Editor对话框。
在对话框中新建焊枪的关闭、大开、小开运动状态,运动状态名称分别设置为“CLOSE”、“OPEN”、“SEMIOPEN”,如下图所示。
这里要注意,一定要将焊枪的运动状态名称设置为“CLOSE”、“OPEN”、“SEMIOPEN”这三个名称,并且全部为大写英文字母,这样焊枪的运动状态才能被软件自动识别。

焊枪运动状态设定的详细操作方法,可以参考之前发布过的C型点焊焊枪或X型点焊焊枪运动机构制作的相关文章,这里不再过多介绍。
机器人气动点焊焊枪工具类型定义
在PDPS软件中,要想让焊枪模型作为气动点焊焊枪,还需要定义焊枪类型为气动点焊焊枪。
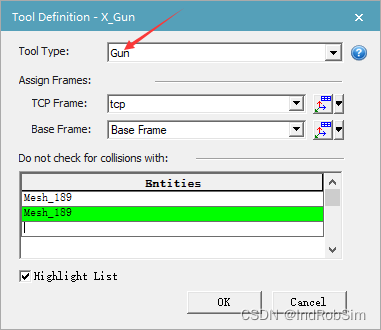
同样在左侧的对象浏览树(Object Tree)中点选气动点焊焊枪模型,“Modeling”菜单栏下的“Kinematic Device”命令组中点击“Tool Definition”命令按钮,弹出Tool Definition对话框。
在对话框的Tool Type后设置机器人工具类型,作为气动点焊焊枪,这里要设定为“Gun”,如下图所示。
当机器人工具类型设置为“Gun”时,表示工具由外部控制器来控制。在PDPS软件中“Gun”类型的工具通过事先定义好的焊枪状态(Gun State)来自动控制其运动状态的切换。
机器人焊枪工具类型定义中其他参数的详细设置方法,可以参考之前发布过的C型点焊焊枪或X型点焊焊枪运动机构制作的相关文章,这里不再过多介绍。
全部设定完成后,将焊枪模型取消可编辑状态。
气动点焊焊枪运动状态切换原理
PDPS软件工艺仿真中,机器人对气动点焊焊枪的控制是通过离线程序命令(OPL Commands)实现的。
将操作浏览树(Operation Tree)中的机器人点焊焊接操作添加到路径编辑器(Path Editor)中,在编辑器的OPL Commands栏下可以看到,每一个焊点操作上默认情况下都被添加了两条离线程序命令。

双击离线程序命令,弹出Default对话框,在OLP Commands框内可以看到这两条离线程序命令,如下图所示。其中,“# Weld”命令为点焊焊接离线程序命令,“# GunToState”为气动点焊焊枪状态切换离线程序命令。
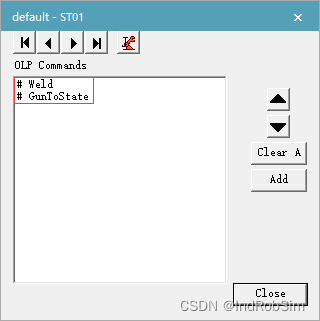
工艺仿真过程中,机器人控制气动点焊焊枪运动状态的切换就是通过这里的“# GunToState”离线程序命令实现的,此命令表示当前点位机器人工具运动完成后最终保持的运动状态。
因此,要控制气动点焊焊枪的关闭、大开、小开运动状态就要事先设定好“# GunToState”离线程序命令中的焊枪运动状态参数。
气动点焊焊枪大开与小开状态切换设置
“# GunToState”离线程序命令中的焊枪运动状态参数是在焊枪状态(Gun State)中设置的,默认情况下Path Editor内并没有显示出“Gun State”栏,需要自定义设置将其显示出来。
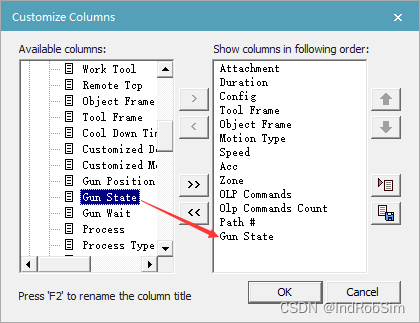
在Path Editor内点击“Customize Columns”按钮,弹出Customize Columns对话框。在对话框中,可以自定义设置Path Editor要显示的功能列表。
在对话框左侧Available columns显示框内的Default条目下将“Gun State”添加到右侧的Show columns in following order显示框内,如下图所示,点击“OK”按钮。
这个时候,在Path Editor内可以看到Gun State功能列表显示了出来,如下图所示。

从Gun State功能列表中可见,焊点操作的Gun State参数均被系统默认设置为“Open”,也就表示气动点焊焊枪在完成当前点位焊接后,最终保持的运动状态为大开。
在焊点操作的Gun State栏上点击,弹出下拉列表,选择“SemiOpen”,就可以将此点位的气动点焊焊枪最终运动状态切换为小开。

对于过渡点操作,默认情况下Gun State栏内并没有设置焊枪的运动状态参数,点击后在其下拉列表中也可以为过渡点设置焊枪的运动状态,过渡点支持设置的焊枪运动状态参数包括“Close”、“Open”、“SemiOpen”,即气动点焊焊枪的关闭、大开、小开运动状态。
参考上述方法,依次为点焊操作程序设置焊枪的运动状态。
机器人仿真运行
气动点焊焊枪运动状态全部设置完成后,对机器人仿真运行,仿真运行效果如下方动态图所示。为了更好地显示焊枪的运动状态,可以先打开焊枪手动运行操作面板(Joint Jog),再进行仿真运行。可以看到,机器人完成每一个焊点的焊接后,焊枪最终保持的运动状态既有大开也有小开。

也可以点击下方视频查看完整的机器人气动点焊焊枪大开与小开运动状态自动切换虚拟仿真效果。
PDPS软件:机器人气动点焊焊枪运动状态切换虚拟仿真
The End
上一篇:PDPS软件:机器人控制旋转台运行虚拟仿真操作方法