在CPU等对性能要求较高的电路中,一般都会采用超前进位加法器,因为超前进位加法器的延时相对来说比较小。下面讲述超前进位加法器的原理:
我们知道,一个三输入,二输出的全加器,其逻辑关系为
S = A ⊕ B ⊕ C i n S=A\oplus B\oplus C_{in} S=A⊕B⊕Cin
C
o
u
t
=
(
A
&
B
)
∣
(
C
i
n
&
(
A
⊕
B
)
)
C_{out}=(A\& B) | (C_{in}\&(A\oplus B))
Cout=(A&B)∣(Cin&(A⊕B))
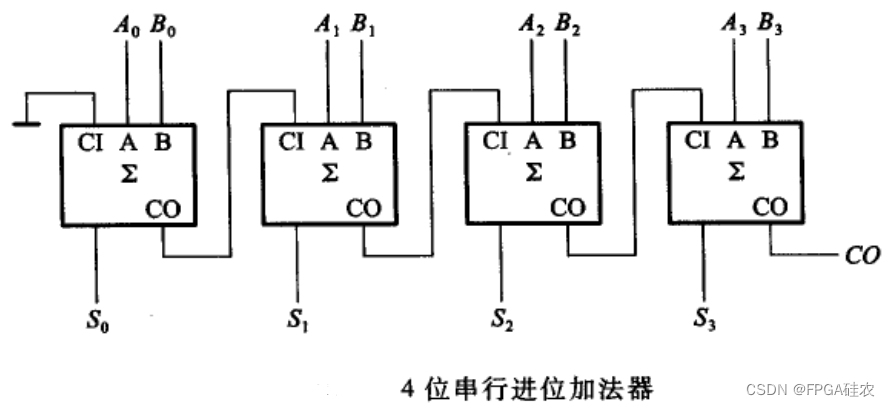
对于普通的级联的加法器,上一位的进位输出需要作为下一位的进位输入,因此,随着加法器位宽的增大,加法器的延时也会线性增大,如下图所示。究其原因,就是下一个比特位对上一个比特位的依赖造成的,超前进位加法器就是解决了这个问题,从而实现低延时的效果。
首先,我们有
C
i
+
1
=
A
i
B
i
+
C
i
(
A
i
+
B
i
)
C_{i+1}=A_{i}B_i+C_i(A_i+B_i)
Ci+1=AiBi+Ci(Ai+Bi)
该式子描述了第i+1位的进位输出和第i位的进位输出之间的关系,如果我们用
C
i
=
A
i
−
1
B
i
−
1
+
C
i
−
1
(
A
i
−
1
+
B
i
−
1
)
C_i=A_{i-1}B_{i-1}+C_{i-1}(A_{i-1}+B_{i-1})
Ci=Ai−1Bi−1+Ci−1(Ai−1+Bi−1)
代替上式中的
C
i
C_i
Ci,则可以得到
C
i
+
1
C_{i+1}
Ci+1和
C
i
−
1
C_{i-1}
Ci−1之间的关系,进一步将
C
i
−
1
C_{i-1}
Ci−1用
C
i
−
2
C_{i-2}
Ci−2表示,一直迭代到
C
0
C_0
C0,即
C
i
n
C_{in}
Cin,我们发现,此时进位输出不再依赖于前面任何一级加法器的结果,因此也就达到了我们要的效果。下图是一个4位超前进位加法器的示意图,由图可知,超前进位加法器的延迟是固定的,与加法器的位宽无关,因此超前进位加法器具有低延迟的优点,然后,从图中也不难发现,随着位宽的增大,与门的扇入也随之增大,因此电路也会变得更加复杂。在实际电路设计中,通过将两者(串行进位加法器、超前进位加法器)相结合,从而在延迟和电路复杂度间进行权衡。
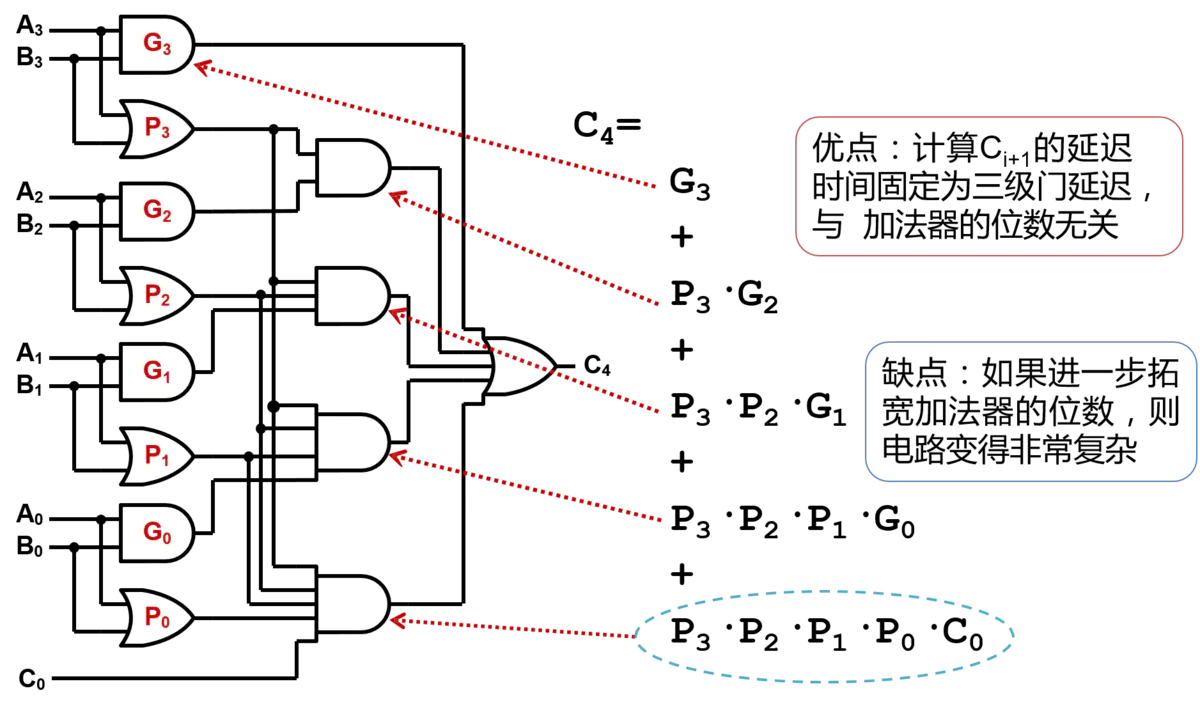
下面是1个简单的4位超前进位加法器的Verilog代码实现:
module CLA(
input logic cin,
input logic [3:0] a,
input logic [3:0] b,
output logic cout,
output logic [3:0] sum
);
logic [4:0] c;
logic [3:0] g;
logic [3:0] p;
//
assign g=a&b;
assign p=a^b;
assign c[0]=cin;
assign cout=c[4];
//Cout=Gi+PiCin
assign c[1]=g[0]|(p[0]&c[0]);
assign c[2]=g[1]|(p[1]&(g[0]|(p[0]&c[0])));
assign c[3]=g[2]|(p[2]&(g[1]|(p[1]&(g[0]|(p[0]&c[0])))));
assign c[4]=g[3]|(p[3]&(g[2]|(p[2]&(g[1]|(p[1]&(g[0]|(p[0]&c[0])))))));
genvar i;
generate
for(i=0;i<4;i++)begin:sum_block
assign sum[i]=p[i]^c[i];
end
endgenerate
endmodule
相应的测试平台为:
module test;
logic [3:0] a;
logic [3:0] b;
logic cin;
logic cout_ref;
logic cout;
logic [3:0] sum_ref;
logic [3:0] sum;
logic error;
initial
begin
repeat(100)
begin
#10
cin=$urandom%2;
a=$urandom%16;
b=$urandom%16;
end
end
assign {cout_ref,sum_ref}=cin+a+b;
assign error=(sum!=sum_ref)?1'b1:1'b0;
initial begin
#1000
$finish;
end
initial begin
$fsdbDumpfile("./out.fsdb");
$fsdbDumpvars(0);
end
CLA u(.*);
endmodule
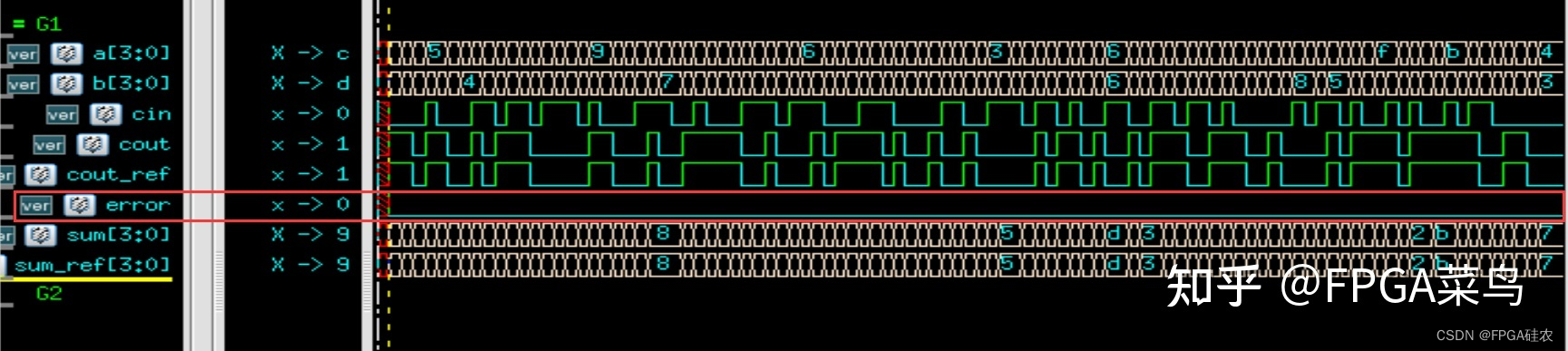
VCS仿真波形如下图所示,可以看到,代码是无误的。
【注】本博客搬运自本人知乎





![[Android开发练习3] 四季图的切换](https://img-blog.csdnimg.cn/e9317af794da415f8ff57aafff4ec644.png)