导论:
扫描系统根据反射旋转类型分为平面振镜扫描和转股扫描,根据光路途径分为一维、二维和三维扫描,根据振镜和扫描镜头的位置又可分为镜前扫描和镜后扫描。
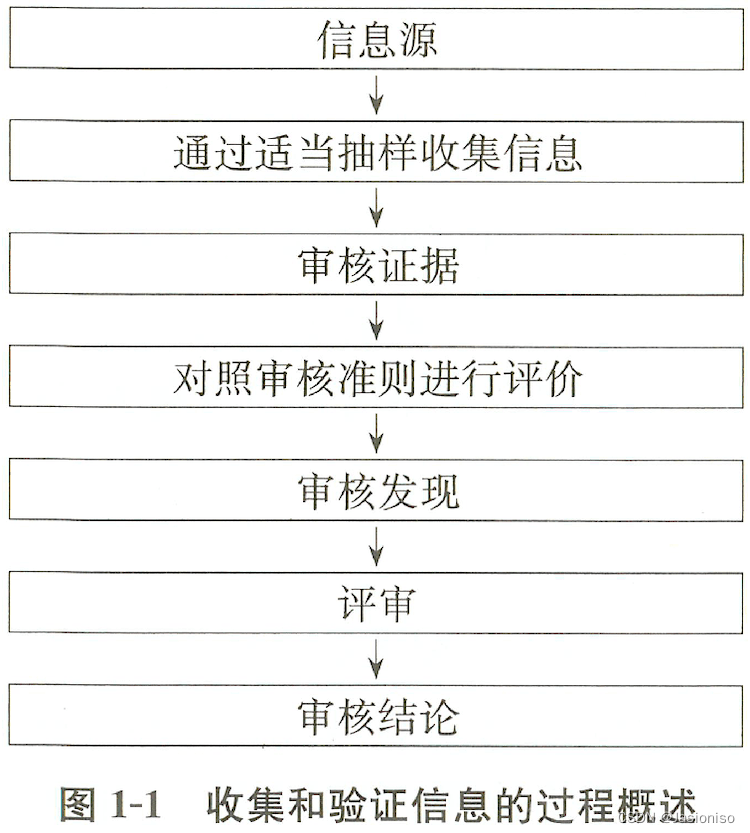
设计流程:
zemax设计与优化:
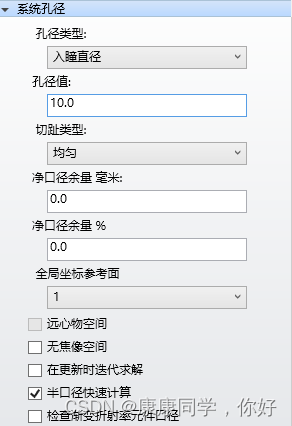
系统建模
在孔径类型中选择入瞳直径,并按设计要求输入“10”。
在视场中输入1个视场,“0”视场。选择角度。

在波长对话框中输入0.6328加入一个波长,如下图:
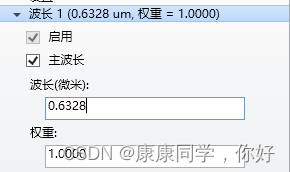
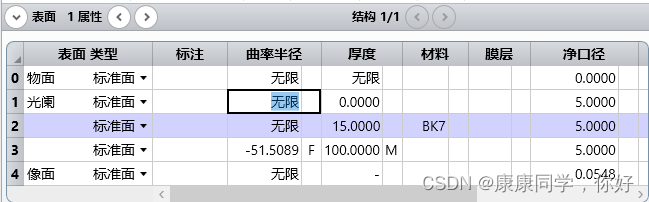
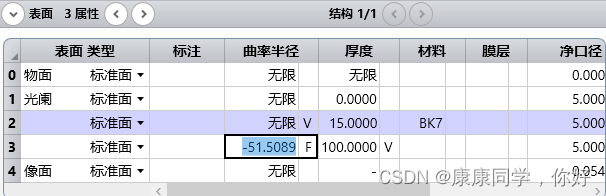
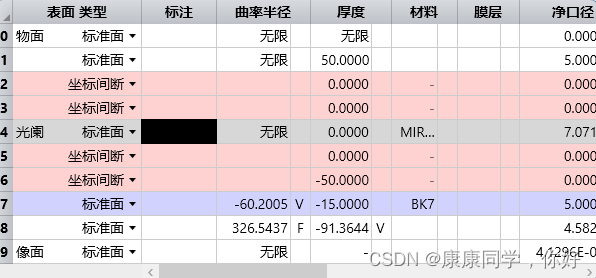
然后再镜头数据编辑器中输入系统的初始结构,在第3面的半径设置F解,F/#=10(即焦距为100mm),如下图:
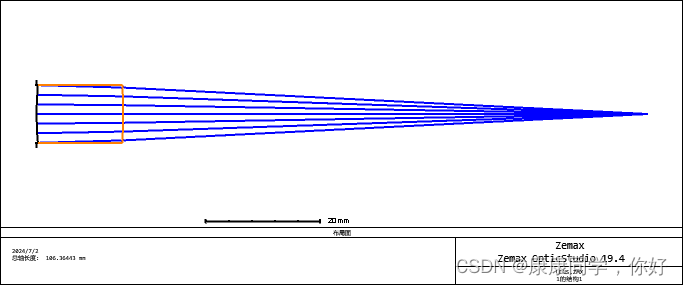
观察二维结构,

系统优化
打开评价函数编辑器,选择默认构成“RMS+Spot Radius+centroid”
确定后,系统自动生成一系列控制像差的操作数。
insert键加入一行,输入EFFL操作数控制系统焦距为100mm,权重为1。

返回镜头数据编辑器,为系统设置变量。将第二面曲率半径和第三面厚度设置为变量,如下图:
点击优化,优化后结构如下图
添加振镜
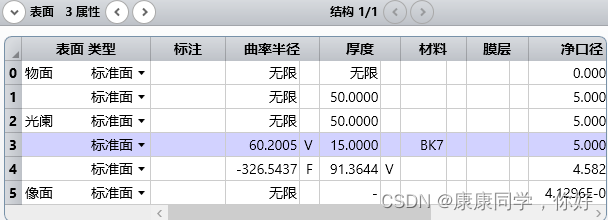
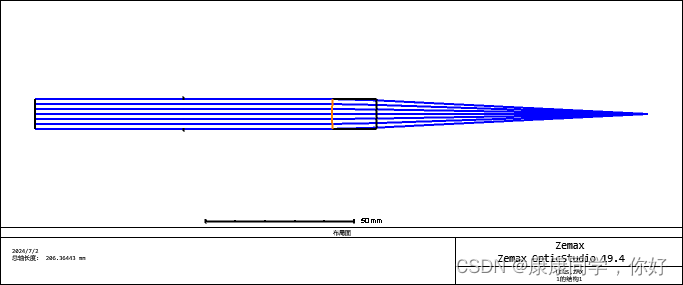
将光阑面的厚度设为50mm,在光阑面前插入一个虚拟面,将虚拟面厚度设为50mm如下图
二维图
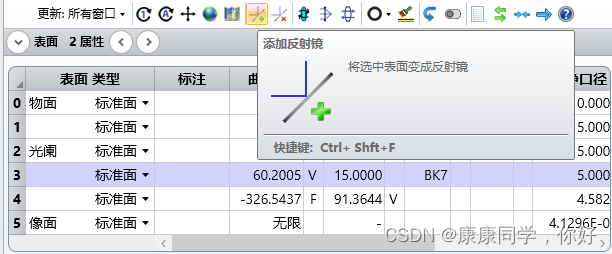
添加折反射工具

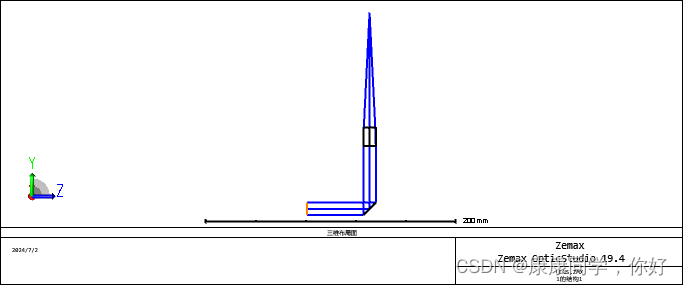
查看三维图
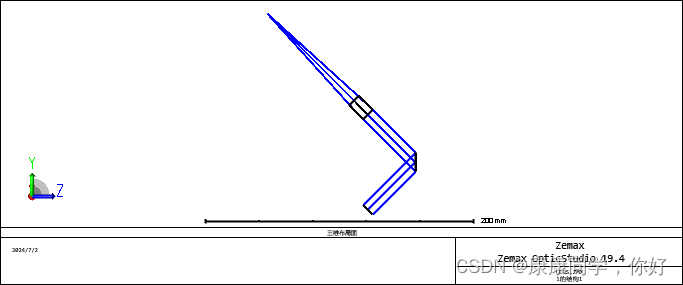
将入射光束设为全局参考,
观察三维图
设置多重结构下的扫描角度
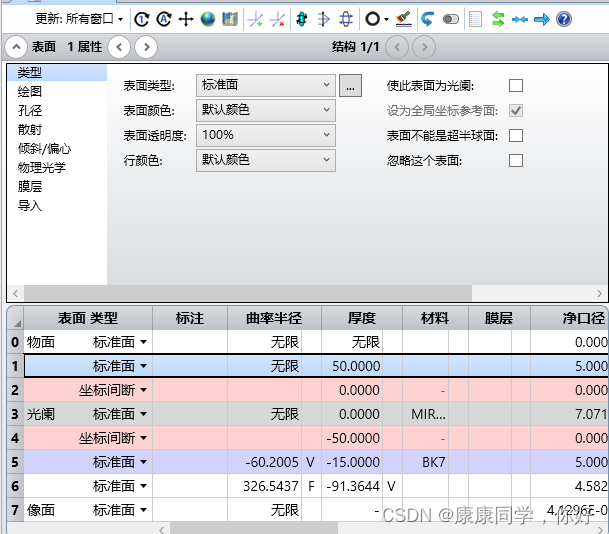
在第三个面前后加入坐标间断面
按F7打开多重结构编辑器并按ctrl+shift+insert加入4个组态
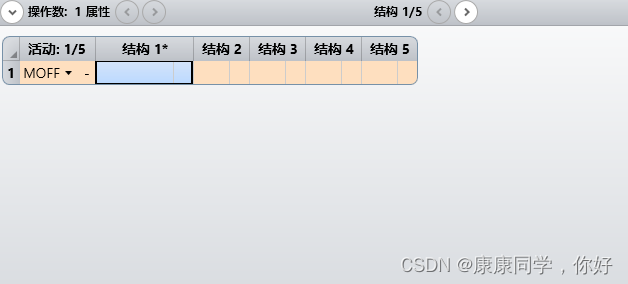
反射镜旋转不同角度形成不同的扫描状态,我们需要把控制反射镜旋转角度的参数提取到多重组态下,让他们单独变化,那么控制旋转角度的就是当前的第3个表面的“x倾斜”参数,在多重组态下选择这个参数的操作数,即Par3/3,PRAM参数值,此操作数可控制任何参数。
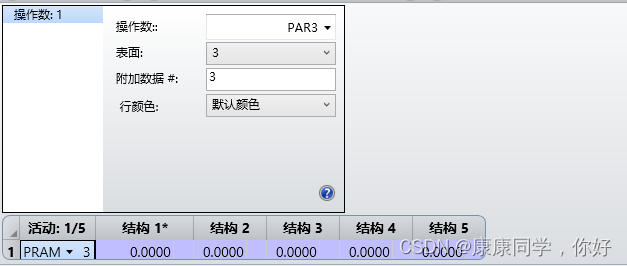
然后在5个组态下输入五个角度值-10、-5、0、5、10,如下图:

查看三维图,选择颜色显示“结构”,结构“所有”

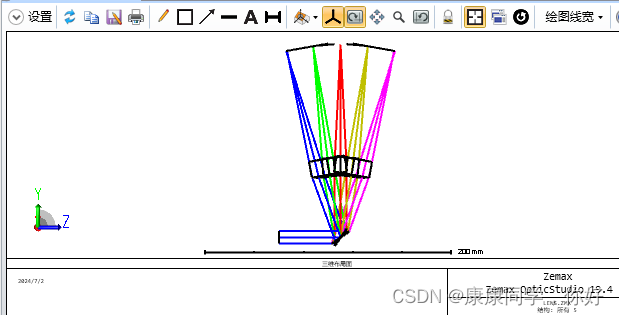
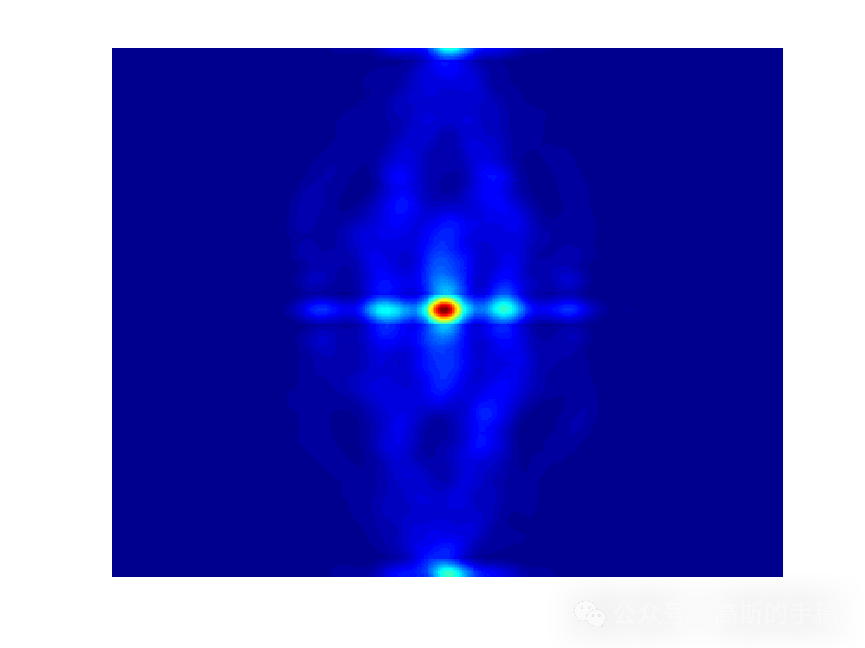
查看结构矩阵点列图

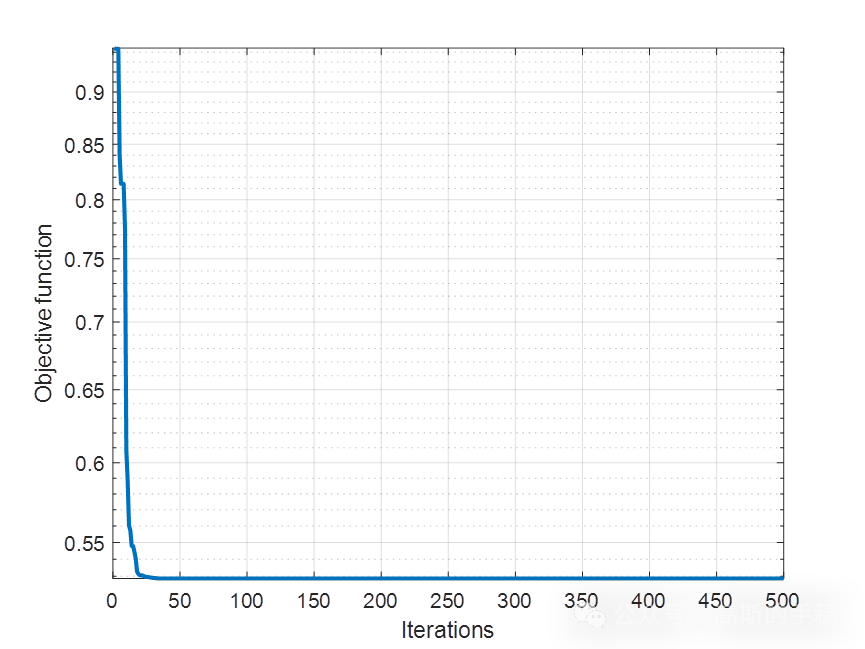
统一优化系统
从3D视图和点列图中可以看出,由于场曲导致的外视场相差很大,以下进行统一优化。
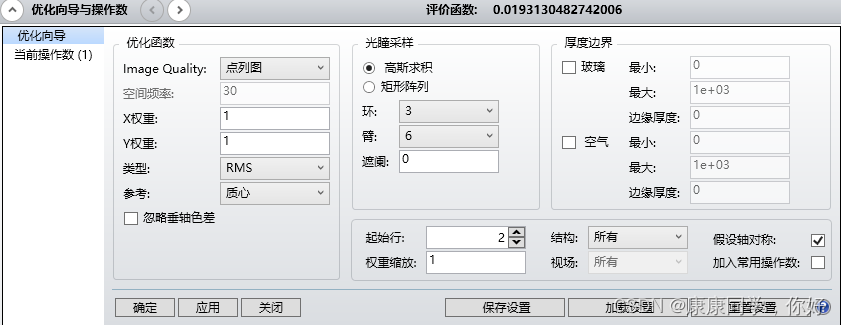
首先建立评价函数。
打开评价函数编辑器,选择“点列图+RMS+质心”
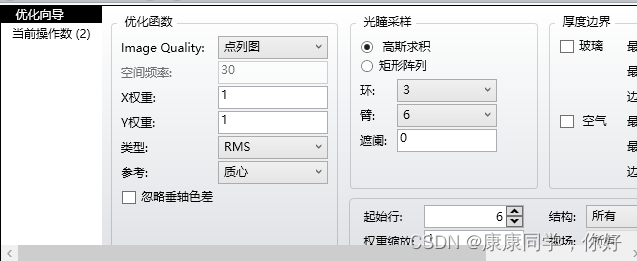
点击优化,
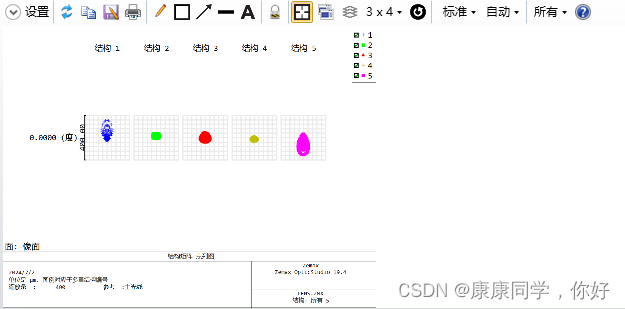
所有组态光斑大小趋于一致。
总结:靠近反射镜的两个坐标间断是反射镜控制光路的,外面两个坐标间断是用来控制反射镜角度的。
操作数PRAM可控制镜头数据中的参数。