ORB-SLAM2和ORB-SLAM3怎么跑出来,之前都有相关的保姆级的教程,下来给大家介绍一款evo工具,给科研加速!!!
文章目录
- 1.下载evo
- 2.生成轨迹
- 3.evo别的功能使用
1.下载evo
输入命令下载
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple evo
下载完了输入evo是下面的样子就是下载成功,如果输入evo显示没有此命令,那么重启虚拟机即可!!!
2.生成轨迹
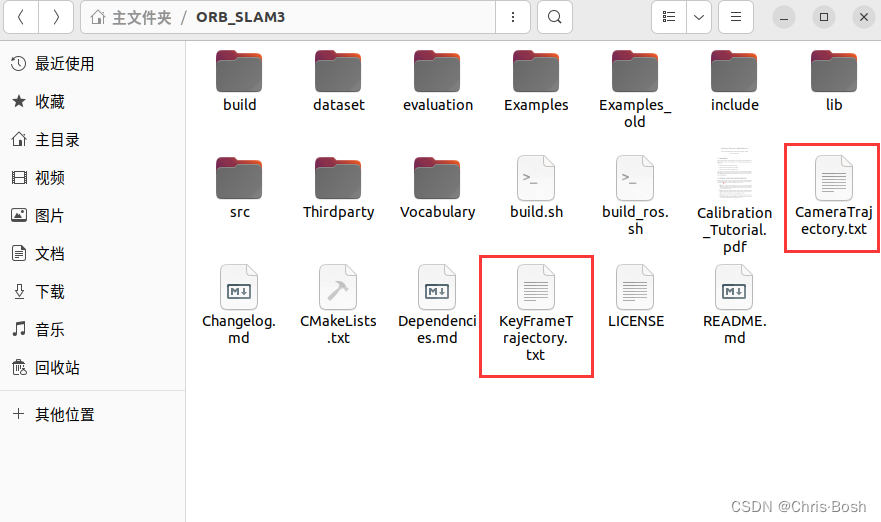
我们跑完数据集会生成如图所示的轨迹
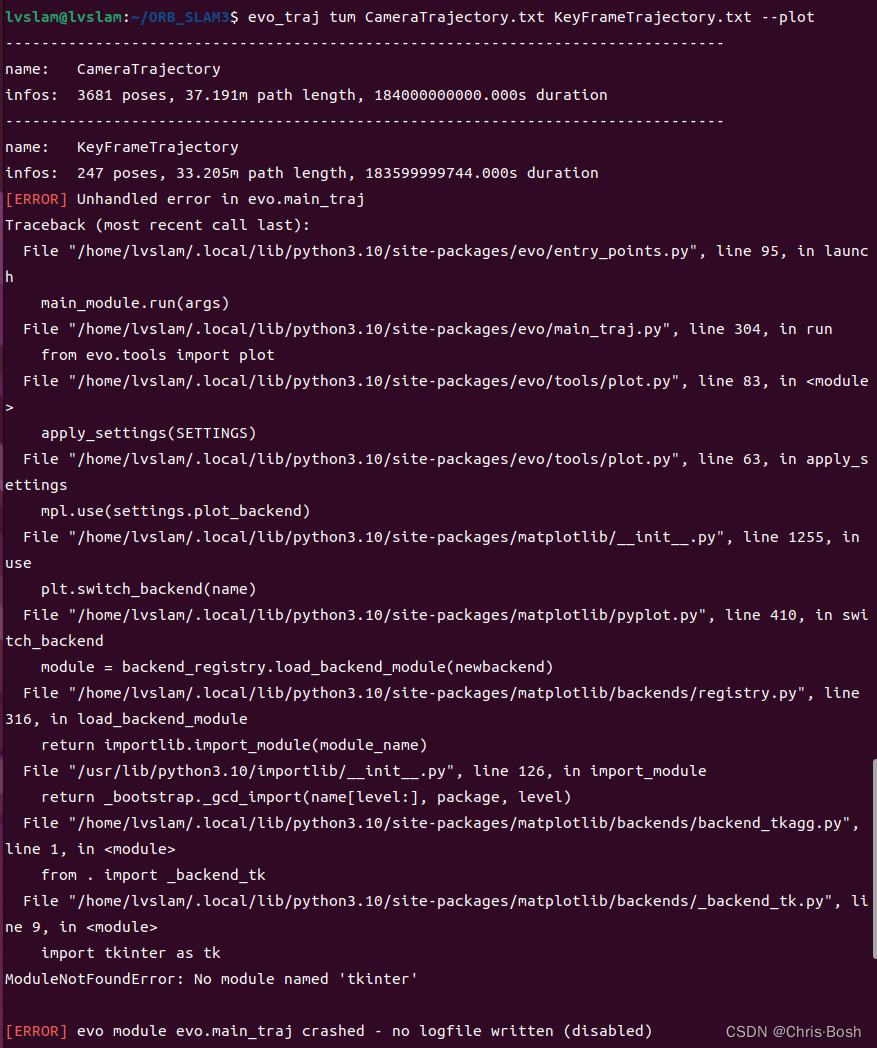
我们输入命令对比真实轨迹和相机轨迹:
evo_traj tum CameraTrajectory.txt KeyFrameTrajectory.txt --plot
会有如下报错:
解决方案:
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple matplotlib --upgrade
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple numpy --upgrade --user
sudo apt install python3-tk
然后安装完这些东西,我再运行又有了新错误:

解决方案:
sudo apt-get install python3-pil python3-pil.imagetk
然后就结局了所闻问题了,再次运行:
evo_traj tum CameraTrajectory.txt KeyFrameTrajectory.txt --plot
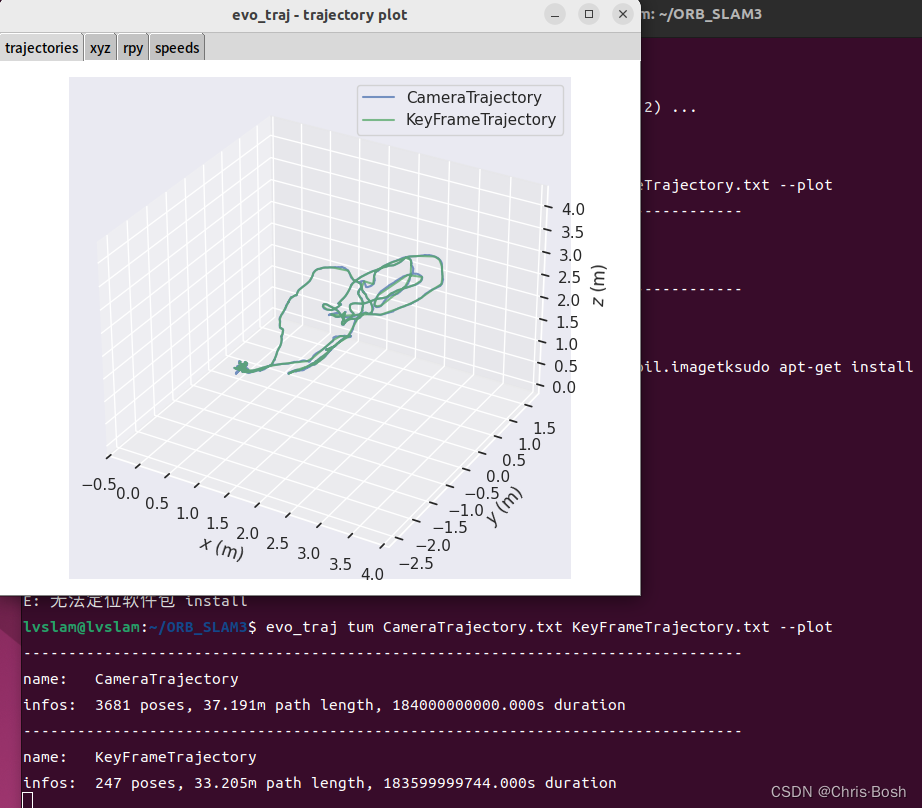
我们的轨迹对比就出来了!!!!
3.evo别的功能使用
我感觉这位大佬写的很好很详细:
链接: evo安装、evo使用方法详细介绍使用教程,SLAM轨迹精度评估工具,如何用来评估ORB-SLAM2生成的轨迹精度,评估激光雷达SLAM与视觉SLAM的轨迹精度,量化SLAM的误差





![【2024最新华为OD-C/D卷试题汇总】[支持在线评测] 灰度图像恢复(100分) - 三语言AC题解(Python/Java/Cpp)](https://i-blog.csdnimg.cn/direct/d16c3fc15aec4ea487ad2a13774cfb0b.png)