文章目录
- 14 卡尔曼滤波及代码实现
- 14.0 基本概念
- 14.1 公式推导
- 14.2 代码实现
14 卡尔曼滤波及代码实现
14.0 基本概念
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
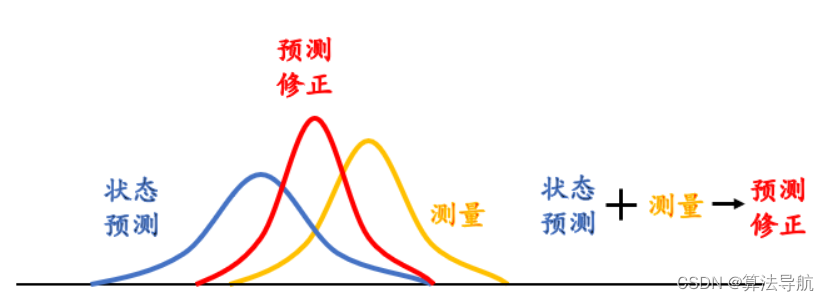
通俗来说就是,线性数学模型算出预测值+传感器测量值=更准确的测量值。根据数学模型,由第 k k k 时刻的值递推得到第 k + 1 k+1 k+1 时刻的预测值,结合第 k + 1 k+1 k+1 时刻的观测值,得到第 k + 1 k+1 k+1 时刻更精准的值。
卡尔曼滤波主要用于 线性高斯系统。
14.1 公式推导
(1)线性高斯系统表达
状态方程:
x k = A x k − 1 + B u k + w k \boldsymbol{x}_k = \boldsymbol{A}\boldsymbol{x}_{k-1}+\boldsymbol{B}\boldsymbol{u}_k+\boldsymbol{w}_k xk=Axk−1+Buk+wk
观测方程:
z k = H x k + v k \boldsymbol{z}_k = \boldsymbol{H}\boldsymbol{x}_k+\boldsymbol{v}_k zk=Hxk+vk
其中, x k \boldsymbol{x}_k xk 为状态量, z k \boldsymbol{z}_k zk 为观测量, A \boldsymbol{A} A 为状态转移矩阵, B k \boldsymbol{B}_k Bk 为控制输入矩阵, H \boldsymbol{H} H 为状态观测矩阵。
w k \boldsymbol{w}_k wk 是过程噪声,服从高斯分布, w k \boldsymbol{w}_k wk 是观测噪声,也服从高斯分布,即:
w k ∼ N ( 0 , Q ) \boldsymbol{w}_k \sim N(0, \boldsymbol{Q}) wk∼N(0,Q)
v k ∼ N ( 0 , R ) \boldsymbol{v}_k \sim N(0, \boldsymbol{R}) vk∼N(0,R)
其中 Q \boldsymbol{Q} Q 是过程噪声的协方差, R \boldsymbol{R} R 是观测噪声的协方差。
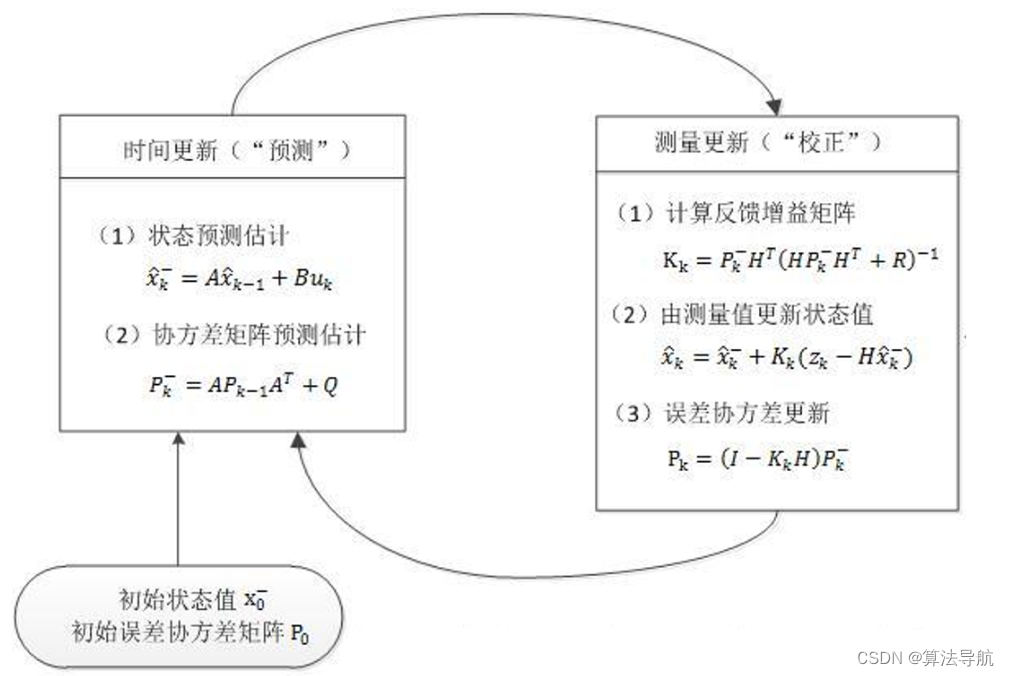
卡尔曼滤波包括预测和更新两步。
(2)预测(先验)
预测是根据上一时刻的状态量,由状态方程预测出下一时刻的状态量 x ^ k − \hat{\boldsymbol{x}}_k^{-} x^k− ,以及状态量误差协方差的先验估计矩阵 P k − \boldsymbol{P}_k^{-} Pk−。这是没有加观测值的。
x ^ k − = A x ^ k − 1 + B u k \hat{\boldsymbol{x}}_k^{-} = \boldsymbol{A}\hat{\boldsymbol{x}}_{k-1}+\boldsymbol{B}\boldsymbol{u}_k x^k−=Ax^k−1+Buk
P k − = A P k − 1 A T + Q \boldsymbol{P}_k^{-}=\boldsymbol{AP}_{k-1}\boldsymbol{A}^T+\boldsymbol{Q} Pk−=APk−1AT+Q
其中, A x ^ k − 1 \boldsymbol{A}\hat{\boldsymbol{x}}_{k-1} Ax^k−1 是上一时刻的最优估计。
(3)更新(后验)
加入观测,对预测值进行更新校正,得到最优后验估计。
首先计算增益矩阵
K k = P k − H T ( H P k − H T + R ) − 1 \boldsymbol{K}_k=\boldsymbol{P}_k^{-}\boldsymbol{H}^T(\boldsymbol{H}\boldsymbol{P}_k^{-}\boldsymbol{H}^T+\boldsymbol{R})^{-1} Kk=Pk−HT(HPk−HT+R)−1
更新状态量及其协方差矩阵
x ^ k = x ^ k − + K k ( z k − H x ^ k − ) \hat{\boldsymbol{x}}_k = \hat{\boldsymbol{x}}_k^{-} + \boldsymbol{K}_k(\boldsymbol{z}_k-\boldsymbol{H}\hat{\boldsymbol{x}}_k^{-}) x^k=x^k−+Kk(zk−Hx^k−)
P k = ( I − K k H ) P k − \boldsymbol{P}_k=(\boldsymbol{I}-\boldsymbol{K}_k\boldsymbol{H})\boldsymbol{P}_k^{-} Pk=(I−KkH)Pk−
14.2 代码实现
以雷达追踪目标为背景,系统的状态方程为
[ x y V x V y a x a y ] k + 1 = [ 1 0 δ t 0 0.5 δ t 2 0 0 1 0 δ t 0 0.5 δ t 2 0 0 1 0 δ t 0 1 0 0 1 0 δ t 0 0 0 0 1 0 0 0 0 1 0 1 ] [ x y V x V y a x a y ] k \begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_{k+1}=\begin{bmatrix}1&0&\delta_t&0&0.5\delta_t^2&0\\0&1&0&\delta_t&0&0.5\delta_t^2\\0&0&1&0&\delta_t&0\\1&0&0&1&0&\delta_t\\0&0&0&0&1&0\\0&0&0&1&0&1\end{bmatrix}\begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_k xyVxVyaxay k+1= 100100010000δt010000δt01010.5δt20δt01000.5δt20δt01 xyVxVyaxay k
观测方程
[ x y ] k + 1 = [ 1 0 0 0 0 0 0 1 0 0 0 0 ] [ x y V x V y a x a y ] k \begin{bmatrix}x\\y\end{bmatrix}_{k+1}=\begin{bmatrix}1&0&0&0&0&0\\0&1&0&0&0&0\end{bmatrix}\begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_k [xy]k+1=[100100000000] xyVxVyaxay k
/*********************************************************** *
* Time: 2023/11/26
* Author: xiaocong
* Function: 卡尔曼滤波
***********************************************************/
#ifndef KALMANFILTER_H
#define KALMANFILTER_H
#include <eigen3/Eigen/Dense>
#include <iostream>
using namespace Eigen;
using namespace std;
class KalmanFilter
{
public:
KalmanFilter(int stateSize, int measSize, int uSize); // 构造函数
void init(VectorXd& x, MatrixXd& P, MatrixXd& R, MatrixXd& Q); // 初始化
void predict(MatrixXd& A);
void predict(MatrixXd& A, MatrixXd& B, VectorXd& u); // 重载,针对有控制输入的情况
VectorXd update(MatrixXd& H, VectorXd z_meas); // 更新
~KalmanFilter(); // 析构函数
private:
VectorXd x_; // 状态变量
VectorXd z_; // 观测变量
MatrixXd A_; // 状态转移矩阵
MatrixXd B_; // 控制矩阵
VectorXd u_; // 控制变量
MatrixXd P_; // 状态值的协方差矩阵
MatrixXd H_; // 观测矩阵
MatrixXd R_; // 观测噪声协方差矩阵
MatrixXd Q_; // 过程噪声协方差矩阵
};
#endif //KALMANFILTER_H
#include "../inlude/KalmanFilter.h"
// 构造函数
KalmanFilter::KalmanFilter(int stateSize, int measSize, int uSize)
{
if (stateSize == 0 || measSize == 0)
{
std::cerr << "Error, State size and measurement size must bigger than 0" << endl;
}
x_.resize(stateSize);
x_.setZero();
A_.resize(stateSize, stateSize);
A_.setIdentity();
u_.resize(uSize);
u_.setZero();
B_.resize(stateSize, uSize);
B_.setZero();
P_.resize(stateSize, stateSize);
P_.setIdentity();
H_.resize(measSize, stateSize);
H_.setZero();
Q_.resize(stateSize, stateSize);
Q_.setIdentity();
R_.resize(measSize, measSize);
R_.setIdentity();
}
void KalmanFilter::init(VectorXd& x, MatrixXd& P, MatrixXd& R, MatrixXd& Q)
{
x_ = x;
P_ = P;
R_ = R;
Q_ = Q;
}
void KalmanFilter::predict(MatrixXd& A) // 没有控制输入u
{
A_ = A;
x_ = A * x_;
P_ = A_ * P_ * A_.transpose() + Q_;
}
void KalmanFilter::predict(MatrixXd& A, MatrixXd& B, VectorXd& u) // 有控制输入u
{
A_ = A;
B_ = B;
u_ = u;
x_ = A * x_ + B * u_;
P_ = A_ * P_ * A_.transpose() + Q_;
}
VectorXd KalmanFilter::update(MatrixXd& H, VectorXd z_meas) // 更新
{
H_ = H;
MatrixXd temp = H_ * P_ * H_.transpose() + R_;
MatrixXd K = P_ * H_.transpose() * temp.inverse();
x_ = x_ + K * (z_meas - H_ * x_); // 更新 x_k
MatrixXd I = MatrixXd::Identity(x_.rows(), x_.rows());
P_ = (I - K * H_) * P_;
return x_;
}
KalmanFilter::~KalmanFilter()
{
}
#include "../inlude/KalmanFilter.h"
#include <fstream>
#define N 1000
#define T 0.01
double data_x[N], data_y[N];
// 模型函数
double sample(double x0, double v0, double acc, double t)
{
return x0 + v0 * t + 0.5 * acc * t * t;
}
double getRand()
{
return 0.5 * rand() / RAND_MAX - 0.25; //[-0.25, 0.25)
}
int main()
{
ofstream fout;
fout.open("../data/data.txt");
// 生成观测值
double t;
for (int i = 0; i < N; i++)
{
t = T * i;
data_x[i] = sample(0, -4.0, 0.1, t) + getRand();
data_y[i] = sample(0.1, 2.0, 0, t) + getRand();
}
int stateSize = 6;
int measSize = 2;
int uSize = 0;
KalmanFilter kf(stateSize, measSize, uSize);
Eigen::MatrixXd A(stateSize, stateSize);
A << 1, 0, T, 0, 1 / 2 * T * T, 0,
0, 1, 0, T, 0, 1 / 2 * T * T,
0, 0, 1, 0, T, 0,
0, 0, 0, 1, 0, T,
0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 1;
Eigen::MatrixXd B(0, 0);
Eigen::MatrixXd H(measSize, stateSize);
H << 1, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0;
Eigen::MatrixXd P(stateSize, stateSize);
P.setIdentity();
Eigen::MatrixXd R(measSize, measSize);
R.setIdentity() * 0.01;
Eigen::MatrixXd Q(stateSize, stateSize);
Q.setIdentity() * 0.001;
Eigen::VectorXd x(stateSize);
Eigen::VectorXd u(0);
Eigen::VectorXd z_meas(measSize);
z_meas.setZero();
Eigen::VectorXd res(stateSize); // 存储预测结果
for (int i = 0; i < N; i++)
{
if (i == 0) // 初始值
{
x << data_x[i], data_y[i], 0, 0, 0, 0;
kf.init(x, P, R, Q);
continue;
}
kf.predict(A); // 预测
z_meas << data_x[i], data_y[i]; // 观测
res << kf.update(H, z_meas); // 更新
fout << data_x[i] << " " << data_y[i] << " " << res[0] << " " << res[1] << " " << res[2] << " " << res[3] << " " << res[4] << " " << res[5] << endl;
}
fout.close();
return 0;
}








![[知识点篇]《计算机组成原理》之计算机系统概述](https://img-blog.csdnimg.cn/direct/29dcb49998074fbdaec6cbfef7272d26.png)