Sparse4D: Multi-view 3D Object Detection with Sparse Spatial-Temporal Fusion
单位:地平线
GitHub:https://github.com/HorizonRobotics/Sparse4D
论文:https://arxiv.org/abs/2211.10581
时间:2022-11
找博主项目讨论方式:wx:DL_xifen
讨论QQ群:345458279
摘要
- 基于BEV的检测方法在多视角3D检测任务中取得了很好的效果,基于稀疏方法的一直落后,但并不是没有优点的。
- 本文提出了一个迭代优化锚框,通过稀疏采样的方法,融合时空特征。叫做sparse 4D
- (1):Sparse 4D Sampling:对每一个3D锚框,将多个采样4D关键点映射到多视角,多尺度,多时间戳上的图片去采集相应特征。
- (2):Hierarchy Feature Fusion:将不同视图/尺度、不同时间戳和不同关键点的采样特征分层融合,生成高质量的实例特征
- (3):从而,Sparse 4D是高效,不依赖稠密视角转换,有利于边缘设备的部署。
- 本文引入了实例级-深度重载模块,缓解3D-到2D映射的病态问题。
- 本文的方法超越了所有基于稀疏感知的方法和一些基于BEV的方法在nuScenes数据集上。

引言
- 多视角的3D感知是自动驾驶系统的关键一环,部署成本低的优势。
- 相较于LiDAR, 相机可以为远距离目标提供视觉线索
- 但是,相机没有深度信息,这就导致了从2d图像中感知3d目标,是一个长期的病态问题。
- 如何融合多视角信息,解决3D感知任务,是一个有意思的问题
- 现在有2种主流方式,一种是基于bev的方法,一种是基于sparse的方法。
- BEV的方法就是将多个视图特征转到统一的BEV空间,实现一个比较好的表现效果
- 但是BEV方法也有一些劣势
- 图像特征转BEV需要稠密的特征采样和重组,计算复杂其计算量大
- 最大感知范围局限于BEV特征图的大小,难以权衡效率,精度,速度。
- 将特征压缩到BEV会丢失一些纹理信息,导致如符号检测就不能实现了。
- 不同于BEV方法,sparse方法不要求稠密视角转换模块,而是直接3D特征采样,然后优化锚框,从而能够避免上述问题。
- 其中最具代表性是的DETR3D,但是他局限于每一个query一个采样点
- SRCN3D 利用RoI-Align采样多视角特征, 但是不够高效同时也不能对其不同视角的特征
- 此外,现有的sparse 3D 并未发挥出时序信息的优势,相较于BEV方法,在精度上有巨大的gap
- 本文提出了一个Sparse4D 解决上述问题
- 每一个锚框采用多个采样点,相较于单采样点和RoI-Align采样具有2点优势:
- 能够提取更加丰富的特征信息
- 便于扩展到时间维度,作为4D的采样点,提取时序信息
- Sparse4D首先对每个关键点执行多时间戳、多视图和多尺度的操作。
- 然后,这些采样特征通过分层融合模块生成高质量的实例特征,用于3D边界框的优化
- 此外,为了缓解基于相机的3D检测深度病态解的问题,提高感知性能,添加了一个实例级深度重权模块,用于预测深度信息(该模块以稀疏的方式进行训练,没有额外的激光雷达点云监督)。
- 主要贡献如下:
- 第一个具有时间上下文融合的稀疏多视角3D检测算法,它可以有效地对齐空间和时间视觉信息,从而实现精确的3D检测。
- 提出了一个 deformable 4D aggregation module 能够灵活计算和采样不同维度的信息
- 提出了一个 depth reweight module 缓解3D感知中的位置病态问题
- 在 nuScenes数据集上超于了所有sparse方法,以及超越了需要BEV方法。
相关工作
稀疏目标检测
- 早期的目标检测任务使用密集输出,再使用NMS进行过滤
- DETR是一个新的检测范式,作为集合预测,利用transformer直接稀疏预测结果。
- DETR采用了query与图像之间的交叉注意力,导致计算量大并且收敛困难。
- 由于使用了全局注意力,DETR也不能认为是一种纯的稀疏方法
- Deformable DETR修改了DETR,提出了基于参考点的局部注意力,能够加速收敛和减少计算量
- Sparse R-CNN提出了一种anchor 稀疏的方案,基于 region proposal,网络结构简单有效。展示了稀疏检测的有效性和优越性
- 3D检测作为2D检测的扩展,也有许多稀疏的检测网络MoNoDETR,DETR3D, Sparse R-CNN3D, SimMOD
单目的3D目标检测
- 单张图片实现3D检测更加具有挑战性
- FCOS3D,SMOKE是基于2阶段的2D目标检测器,通过卷积神经网络直接回归深度信息
- [31,40,43]利用单目的深度估计,将图像转为伪点云,再进行3D目标检测。
- OFT and CaDDN 利用视角变换模块,将视角从图像转为BEV空间,然后完成3D的检测。
- OFT 是将利用3D到2D的映射关系完成的变换,而CaDDN是2D到3D的映射。(更加像一种伪点云的方法)
多视角的3D目标检测
- 稠密方法是多视图三维检测的主要研究方向,它利用密集的特征向量进行视图变换、特征融合或边界框预测。
- 基于是BEV的方法是稠密方法阵营的一大块
- BEVFormer 采用了 deformable attention 来计算BEV特征生成和稠密时空特征的融合
- BEVDet 利用lift-splat operation 实现多视角的变化
- BEVDepth 加入了深度监督,有效的提高了感知精度
- BEVStereo 和 SOLOFusion 引入了时间立体技术到3D检测中,进一步提高了深度估计的精度
- PETR 使用了3D位置编码和全局交叉注意力融合(计算量大,不能算完全的稀疏检测)
- DETR3D 作为稀疏检测的代表,利用稀疏的参考点进行特征采样和融合
- Graph DETR3D在DETR3D 基础上,引入了一个图网络来实现更好的空间特征融合,特别是对于多视图重叠区域。
方法
3.1 整体架构

- 如上图所示,sparse4D 也是编码器-解码器的架构
- 图像编码器提取图像特征使用共享权重(包括了backbone、neck)
- 在 t t t 时刻,输入 N N N个视角的图片,图片编码器提取的多视角多尺度特征图表示为: T t = { I t , n , s ∣ 1 ≤ s ≤ S , 1 ≤ n ≤ N } T_{t} = \{ I_{t,n,s}|1≤s≤S,1≤n≤N\} Tt={It,n,s∣1≤s≤S,1≤n≤N} (S 表示尺度数)
- 为了探索时序信息,将图像特征 T T T 作为队列 I = { I t } t = t s t 0 I=\{ I_{t} \}^{t_{0}}_{t=t_{s}} I={It}t=tst0,其中: t s = t 0 − ( T − 1 ) t_{s}=t_{0}-(T-1) ts=t0−(T−1)
- 之后,解码器通过迭代优化范式预测结果,其中包括了一系列的优化模块和一个分类头(分类置信度)
- 每一个优化模块拿图像特征 I I I,3D锚框 B ∈ R M × 11 B \in \mathbb{R}^{M \times 11} B∈RM×11 和相应的实例特征: F ∈ R M × C F\in \mathbb{R}^{M \times C} F∈RM×C 作为输入
- 此处, M M M 是anchor的数量, C C C 是特征通道数,anchor的格式为:
- { x , y , z , ln w , ln h , ln l , sin y a w . cos y a w , v x , v y , v z } \{ x,y,z, \text{ln} w, \text{ln} h, \text{ln} l , \text{sin} yaw. \text{cos} yaw, vx, vy, vz \} {x,y,z,lnw,lnh,lnl,sinyaw.cosyaw,vx,vy,vz}
- 所有的3D锚框 使用了统一的坐标系
- 在每一个优化模块中,首先采用自注意力,让实例之间进行交互,并且会将anchor 信息注入进去
- 之后,进行可变性 4D 聚合,融合多视角,多尺度,多时间戳下,多关键点的特征
- 进一步,引入了一个深度reweight模块,缓解基于图像的3D检测的病态解问题。
- 最后,一个回归头用于预测当前anchor与gt之间的偏差。
3.2 整体架构
-
实例特征质量在稀疏感知算法中是非常关键的。
-
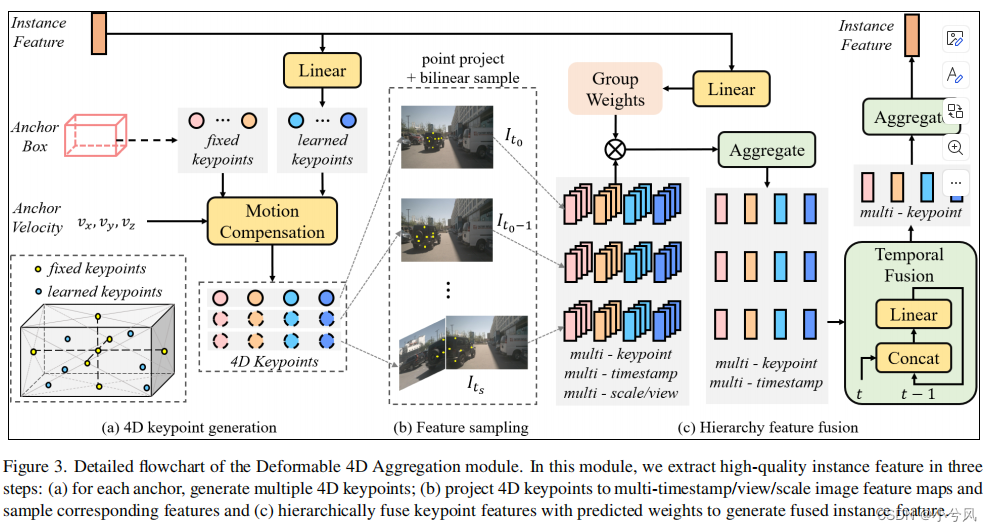
为了解决这个问题,如上图所示,引入了一个可变4D聚合模块来获取高质量实例特征,利用稀疏采用和分层聚合。
-
4D 关键采样点的生成
- 对第 m m m个实例的anchor,我们分配K个4D关键点: P m ∈ R K × T × 3 P_{m} \in \mathbb{R}^{K \times T \times 3 } Pm∈RK×T×3
- 其中有 K F K_{F} KF个固定点,和 K L K_{L} KL个可学习的点
- 如上图(a),在 t 0 t_{0} t0时刻,首先将固定的关键点 P m F P^{F}_{m} PmF, 直接放在锚框的立方体中心和六面中心上。
- 之后,不同于固定点,可学习点跟随实例特征发生变化,根据神经网络去寻找最佳特征表征的位置。
- 鉴于 特征 F m F_{m} Fm中添加锚框的embeding,可学习的关键点 P m , t 0 L P^{L}_{m,t_{0}} Pm,t0L被生成,根据下面的子网络: Φ \Phi Φ
- D m = R y a w ⋅ [ s i g m o i d ( Φ ( F m ) ) − 0.5 ] ∈ R K L × 3 P m , t 0 L = D m × [ w m , h m , l m ] + [ x m , y m , z m ] D_{m}=\mathbf{R}_{yaw}\cdot[\mathbf{sigmoid}\left(\Phi(F_{m})\right)-0.5]\in\mathbb{R}^{K_{L}\times3}\\P_{m,t_{0}}^{L}=D_{m}\times[w_{m},h_{m},l_{m}]+[x_{m},y_{m},z_{m}] Dm=Ryaw⋅[sigmoid(Φ(Fm))−0.5]∈RKL×3Pm,t0L=Dm×[wm,hm,lm]+[xm,ym,zm]
- 其中, R y a w \mathbf{R}_{yaw} Ryaw为偏航的旋转矩阵。
- 时间特征是3D检测的关键,可以提高深度估计的精度
- 因此,在得到当前帧的3D关键点后,我们将其扩展到4D,为时间融合做准备
- 对于过去的时间戳 t t t,首先建立一个恒速模型来移动当前坐标系的3D关键点
- P m , t ′ = P m , t 0 − d t ⋅ ( t 0 − t ) ⋅ [ v x m , v y m , v z m ] P'_{m,t}=P_{m,t_0}-d_t\cdot(t_0-t)\cdot[vx_m,vy_m,vz_m] Pm,t′=Pm,t0−dt⋅(t0−t)⋅[vxm,vym,vzm]
- 其中 d t d_{t} dt是两个相邻帧之间的时间间隔
- 然后,我们利用自车运动信息将 P m , t ′ P'_{m,t} Pm,t′,转换为过去 t t t时刻坐标系下
- P m , t = R t 0 → t P m , t ′ + T t 0 → t P_{m,t}=\mathbf{R}_{t_0\to t}P_{m,t}^{\prime}+\mathbf{T}_{t_0\to t} Pm,t=Rt0→tPm,t′+Tt0→t
- 其中, R t 0 → t \mathbf{R}_{t_0\to t} Rt0→t和 T t 0 → t \mathbf{T}_{t_0\to t} Tt0→t分别表示自车从当前帧 t 0 t_{0} t0到帧 t t t的旋转矩阵和平移矩阵
- 这样,我们最终可以构造4D关键点为: P ~ m = { P m , t } t = t s t 0 \tilde{P}_{m}=\{P_{m,t}\}_{t=t_{s}}^{t_{0}} P~m={Pm,t}t=tst0
-
Sparse Sampling
- 基于上述4D关键点 P P P和图像特征映射队列 F F F,稀疏具有较强的表示能力,可以有效地进行采样。
- 首先,通过变换矩阵 T c a m T^{cam} Tcam将4D关键点投影到特征图上。
- P t , n i m g = T n c a m P t , 1 ≤ n ≤ N P_{t,n}^{\mathrm{img}}=\mathbf{T}_{n}^{\mathrm{cam}}P_{t},1\leq n\leq N Pt,nimg=TncamPt,1≤n≤N
- 然后,我们通过双线性插值对每个视图和每个时间戳进行多尺度特征采样:
- f m , k , t , n , s = Bilinear ( I t , n , s , P m , k , t , n img ) f_{m,k,t,n,s}=\textbf{Bilinear}\left(I_{t,n,s},P_{m,k,t,n}^\text{img}\right) fm,k,t,n,s=Bilinear(It,n,s,Pm,k,t,nimg)
- 其中,下标m、k、t、n和s分别表示锚框、关键点、时间戳、相机和特征图多尺度
- 到目前为止,我们已经获得了第m个候选检测锚框的多关键点、时间戳、视图和尺度特征向量 f m ∈ R K × T × N × S × C f_{m}\in\mathbb{R}^{K\times T\times N\times S\times C} fm∈RK×T×N×S×C,其中C是特征通道的数量。
-
Hierarchy Fusion.
- 为了生成高质量的实例特征,我们将上述特征向量 f m f_{m} fm分层融合。
- 如图3©所示,对于每个关键点,我们首先用预测的权重, 以不同的视图和尺度聚合特征,然后用线性层进行时间融合。
- 最后,对于每个锚框实例,融合多个关键点特征来生成实例特征
- 具体来说,给定添加了锚框embeding的实例特征 F m F_{m} Fm,首先通过线性层 Ψ \Psi Ψ预测加权系数为:
- W m = Ψ ( F m ) ∈ R K × N × S × G W_m=\Psi\left(F_m\right)\in\mathbb{R}^{K\times N\times S\times G} Wm=Ψ(Fm)∈RK×N×S×G
- 其中,G是用通道来划分特征的组数。这样,我们就可以聚合具有不同权重的不同组的通道。类似于group convolution。
- 我们将各组的加权后特征向量沿尺度和视角维度相加,然后将各组拼接起来,得到新的特征 f m , k , t ′ f_{m,k,t}^{'} fm,k,t′。
- f m , k , t , i ′ = ∑ n = 1 N ∑ s = 1 S W m , k , n , s , i f m , k , t , n , s , i f m , k , t ′ = [ f m , k , t , 1 ′ , f m , k , t , 2 ′ , . . . , f m , k , t , G ′ ] \begin{aligned}&f_{m,k,t,i}^{'}=\sum_{n=1}^{N}\sum_{s=1}^{S}W_{m,k,n,s,i}f_{m,k,t,n,s,i}\\&f_{m,k,t}^{'}=\left[f_{m,k,t,1}^{'},f_{m,k,t,2}^{'},...,f_{m,k,t,G}^{'}\right]\end{aligned} fm,k,t,i′=n=1∑Ns=1∑SWm,k,n,s,ifm,k,t,n,s,ifm,k,t′=[fm,k,t,1′,fm,k,t,2′,...,fm,k,t,G′]
- 上面的下标 i i i是组的索引,并且[,]表示连接操作
- 接下来,通过拼接操作和线性层Ψtemp,将特征 f m , k , t ′ f_{m,k,t}^{'} fm,k,t′的时间维度以顺序的方式融合。
- f m , k , t s ′ ′ = f m , k , t s ′ f m , k , t ′ ′ = Ψ t e m p ( [ f m , k , t ′ , f m , k , t − 1 ′ ′ ] ) f m , k ′ ′ = f m , k , t 0 ′ ′ = Ψ t e m p ( [ f m , k , t 0 ′ , f m , k , t 0 − 1 ′ ′ ] ) \begin{aligned} &f_{m,k,t_{s}}^{''}=f_{m,k,t_{s}}^{'} \\ &f_{m,k,t}^{''}=\Psi_{temp}\left(\left[f_{m,k,t}^{'},f_{m,k,t-1}^{''}\right]\right) \\ &f_{m,k}^{''}=f_{m,k,t_{0}}^{''}=\Psi_{temp}\left(\left[f_{m,k,t_{0}}^{'},f_{m,k,t_{0}-1}^{''}\right]\right) \end{aligned} fm,k,ts′′=fm,k,ts′fm,k,t′′=Ψtemp([fm,k,t′,fm,k,t−1′′])fm,k′′=fm,k,t0′′=Ψtemp([fm,k,t0′,fm,k,t0−1′′])
- 对时间融合后的多关键点特征 f m , k ′ ′ f_{m,k}^{''} fm,k′′进行求和,完成最终的特征聚合,得到更新后的实例特征为:
- F m ′ = ∑ k = 1 K f m , k ′ ′ F_m'=\sum_{k=1}^Kf_{m,k}'' Fm′=∑k=1Kfm,k′′
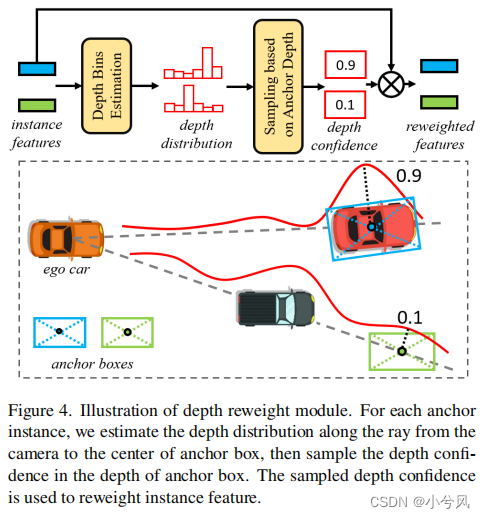
- Depth Reweight Module
- 这个3D到2D的变换(Eq。(5))有一定的模糊性,即不同的3D点可能对应于相同的2D坐标。
- 对于不同的三维锚框,可以对相同的特征进行采样(见图4),这增加了神经网络拟合的难度
- 为了缓解这一问题,我们加入了一个显式深度估计模块 Ψ d e p t h \Psi_{depth} Ψdepth,它由多个具有残差连接的mlp组成。
- 对于每个聚合特征 F m ′ F_{m}^{'} Fm′,我们估计一个离散深度分布,并利用3D锚框中心点深度采样相应的置信 C m C_{m} Cm,用于重新加权实例特征。
- C m = B i l i n e a r ( Ψ d e p t h ( F m ′ ) , x m 2 + y m 2 ) F m ′ ′ = C m ⋅ F m ′ C_{m}=\mathbf{Bilinear}\left(\Psi_{depth}(F_{m}^{'}),\sqrt{x_{m}^{2}+y_{m}^{2}}\right)\\F_{m}^{''}=C_{m}\cdot F_{m}^{'} Cm=Bilinear(Ψdepth(Fm′),xm2+ym2)Fm′′=Cm⋅Fm′
- 这样,对于那些3D中心点在深度方向上远离地面真相的实例,即使二维图像坐标非常接近地面gt,相应的深度置信度也趋于零
- 因此,重新加权后惩罚对应的实例特征 F m ′ ′ F_{m}^{''} Fm′′也趋于0。
- 结合显式深度估计模块可以帮助视觉感知系统进一步提高感知精度
- 此外,深度估计模块也可以作为一个单独的部分进行设计和优化,以促进模型的性能
- Training
- 我们用T帧采样视频片段,以端到端训练检测器。
- 连续帧之间的时间间隔在{dt,2dt)中随机采样(dt≈0.5)
- 与DETR3D一样 ,使用匈牙利算法将每个地面真相与一个预测值进行匹配。
- 损失包括三部分:分类损失、边界框回归损失和深度估计损失:
- L = λ 1 L c l s + λ 2 L b o x + λ 3 L d e p t h L=\lambda_1L_{cls}+\lambda_2L_{box}+\lambda_3L_{depth} L=λ1Lcls+λ2Lbox+λ3Ldepth
- 其中,λ1、λ2和λ3是平衡梯度的权重项。
- 我们采用focal loss进行分类,采用L1 loss 边界框回归,binary cross entropy loss进行深度估计。
- .在深度重权模块中,我们直接使用标签的边界框中心的深度作为gt来监督每个实例的深度。
- 由于只估计每个实例的深度,而不是密集的深度,因此训练过程摆脱了对激光雷达数据的依赖。
实验 Experiment
数据和指标
- nuScenes数据集
- 指标:
- 平均平均精度(mAP)、平移平均误差(mATE)、尺度平均误差(mASE)、方向平均误差(mAOE)、速度平均误差(mAVE)、属性平均误差(mAAE)和nuScenes检测评分(NDS),
- 平均多目标跟踪精度(AMOTA)、平均多目标跟踪精度(AMOTP)和召回率是三个主要的评价指标。
实验细节 Implementation Details
- 通过对训练集进行K-Means聚类,得到了3D锚框的初始化{x、y、z}参数,
- 其他参数都用固定值{1、1、1、0、0、0、0、0}初始化。
- 实例特征使用随机初始化
- 默认情况下,3D锚框和实例个数M设置为900,级联优化次数为6,neck的特征的尺度个数S为4,固定采样关键点 K F K_{F} KF为7,可学习关键点 K L K_{L} KL为6,输入图像大小为640×1600,骨干为ResNet101。
- sparse4d使用AdamW优化器进行训练
- 主干网络和其他网络的初始学习率分别为2e-5和2e-4。
- 衰减策略是余弦退火
- 初始的网络参数来自于预先训练过的FCOS3D
- 对于在nuScenes测试集上的实验,网络被训练了48个epoch,而其余的实验只被训练了24个epoch,除非另有说明
- 为了节省GPU内存,我们在训练阶段将所有历史帧的特征图 f t ′ f_{t}^{\prime} ft′分离。
- 所有实验均未使用CBGS [50]和测试时间增强。
消融实验 Ablation Studies and Analysis
- 深度模块和可学习的关键点

- 运动补偿

- 只加入时序信息,也有mAVE和NDS的提升
- 加入自车运动,性能极大提高
- 加入目标车辆运动,检测精度没有提高,但是速度误差降低了
- 优化次数
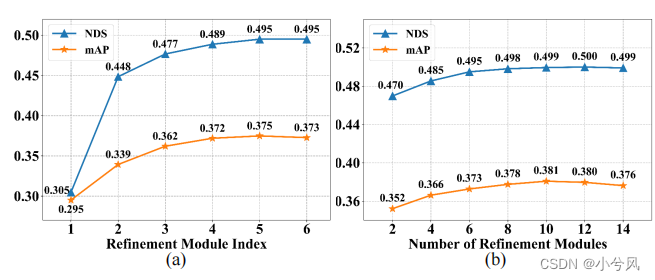
- (a)训练的时候优化次数为6,
- (b)不停增加优化次数,10次是最好的
- 历史帧数

- 随着帧数的增加,还有提升空间.
- FLOPs and Parameters.

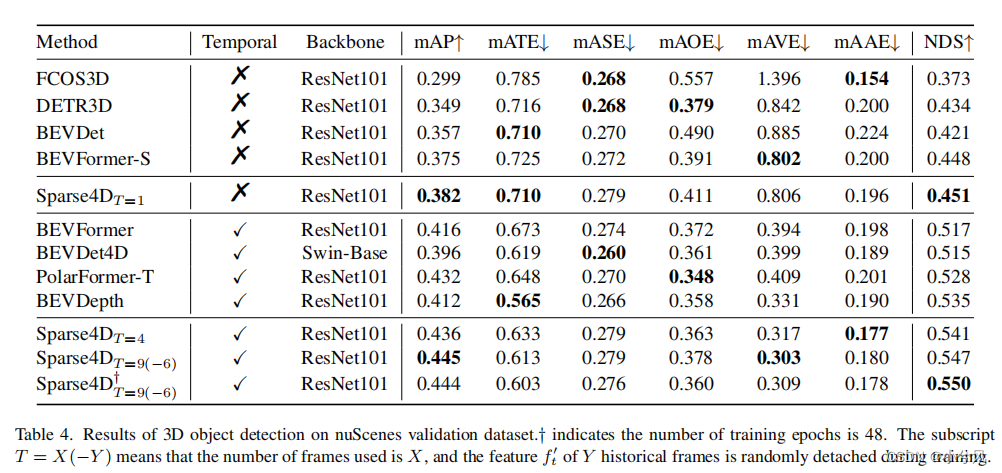
Main Results

Extend to 3D Object Tracking

总结
- 在这项工作中,我们提出了一种新的方法,Sparse4D,该方法通过一个可变形的四D聚合模块,实现了多时间戳和多视图的特征级融合,并使用迭代优化来实现3Dbox的回归
- Sparse4D可以提供良好的感知性能,并且它在nuScenes排行榜上优于所有现有的稀疏算法和大多数基于bev的算法。
- 在深度加权模块中,可以添加多视图立体技术,以获得更精确的深度估计。、
- 在编码器中也可以考虑摄像机参数,以提高三维泛化效果
- 因此,我们希望Sparse4D可以成为稀疏3D检测的新基线。
- Sparse4D的框架也可以扩展到其他任务,如高清地图的构建、OCC估计、三维重建等。




![[知识点篇]《计算机组成原理》之计算机系统概述](https://img-blog.csdnimg.cn/direct/29dcb49998074fbdaec6cbfef7272d26.png)