1. 前言
树和图形状相似,也有差异性。树中添加一条或多条边,可成图。图中减小一条或多条边,可成树。形态的变化由数据之间的逻辑关系决定。
- 图用来描述数据之间多对多关系。
- 树用来描述数据之间一对多关系。
思考如下问题?
如果在一座城市城市里铺设一条地铁,要求:
- 需求通过每一个街区。
- 线路或造价等最短(少)。
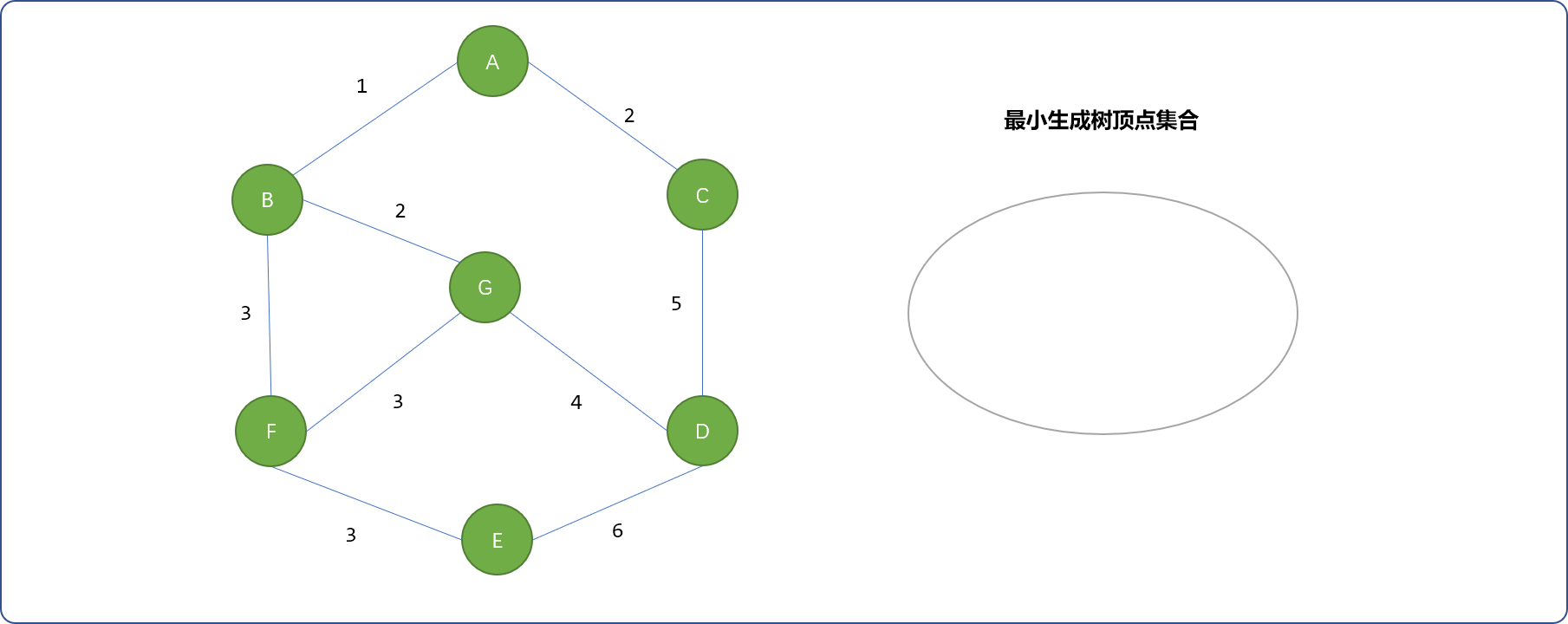
街区之间的逻辑关系可以用无向加权图描述。建设地铁,意味着在图中查找一棵最小生成树,这样才能满足上述要求。
什么是最小生成树?
所谓最小生成村,指从图中找出一棵树,且此树满足如下几个条件:
- 包含图中的所有顶点。
- 树中不能有环(每个顶点仅能出现一次)。
- 树中所有边的权重之和最小。
如果一个算法能同时解决上面的 3 个问题,则称这种算法为图的最小生树算法。
本文讲解kruskal和prim `最小树生成算法。
2. kruskal(克鲁斯卡尔)算法
2.1 算法思想
kruskal是如何解决最小生成树中的 3 个问题?
kruskal算法集结了 2 个核心思想:
-
贪心思想。
-
并查集思想。
贪心思想保证权重和最小
kruskal先把图中的边按权重由小到大有序排序,这里的贪心指保证每次选择权重最小的边。如果通过每次选择权重最小的边构成的树显然是权重最小的树。
并查集思想保证顶点的唯一性
树的生成是逐步过程。或者说在生成最小树过程中,有一个边界,把图中的所有顶点分成相对 2 个部分,一个是构成最小生成树的顶点集合,一个是没有加入树的顶点集合,姑且称为其它集合。
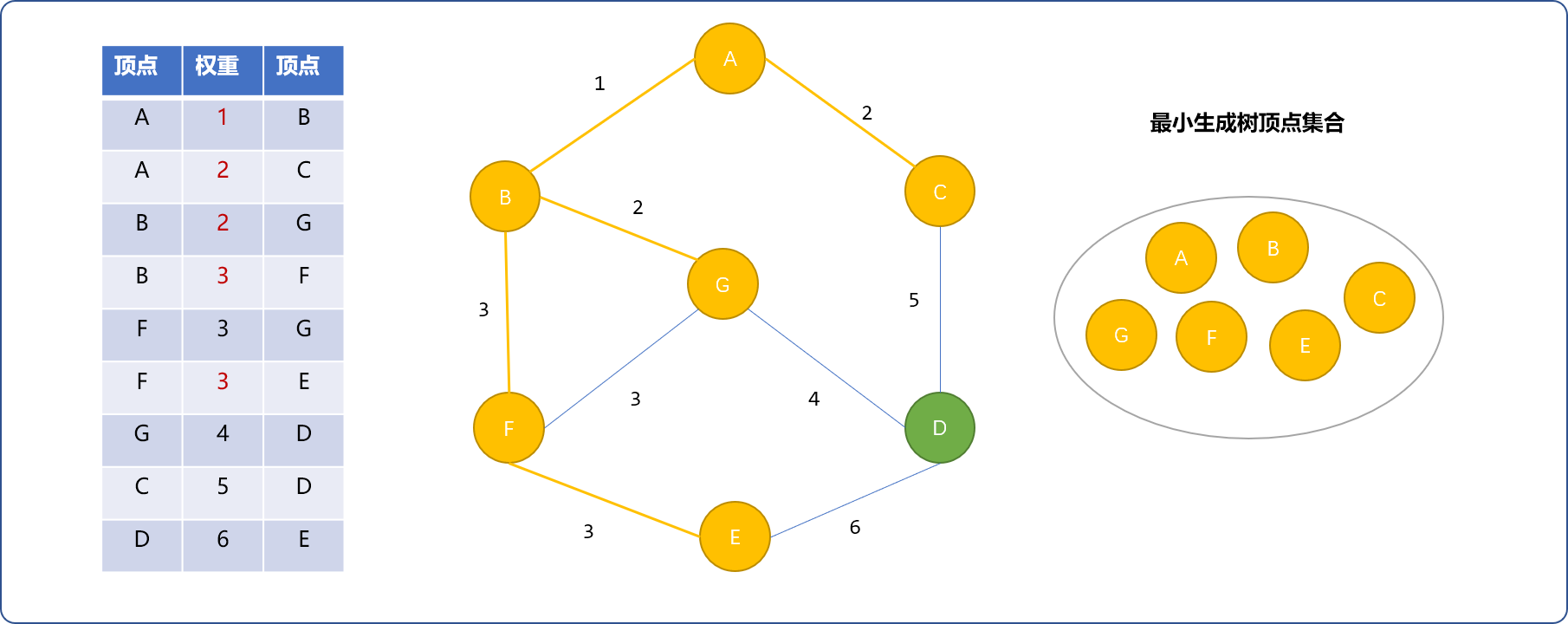
如下图所示,刚开始最小生成树集合是空的。
显然,在把图中的顶点加入到最小生成树顶点集合时,是不能把同一个顶点加入 2 次的。并查集可以做到这点。
Tips:那么,如何保证操作过程中顶点选择的唯一性?
算法使用了并查集思想。如果对并查集不是很了解,可以翻阅我的相关博文。
好!现在演示一下kruskal算法的流程。
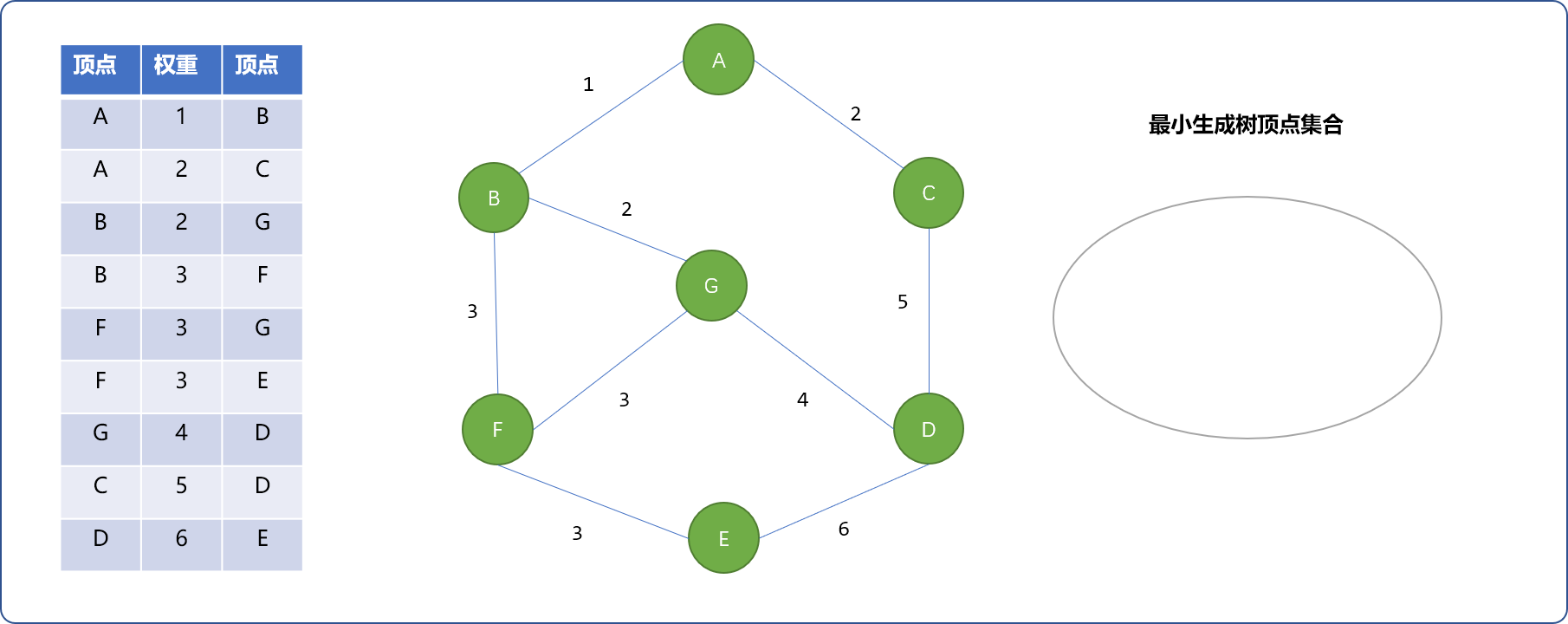
- 把图中的
边按权重由小到大进行有序排列,且把每一个顶点当成一个独立的集合。如下图所示。
-
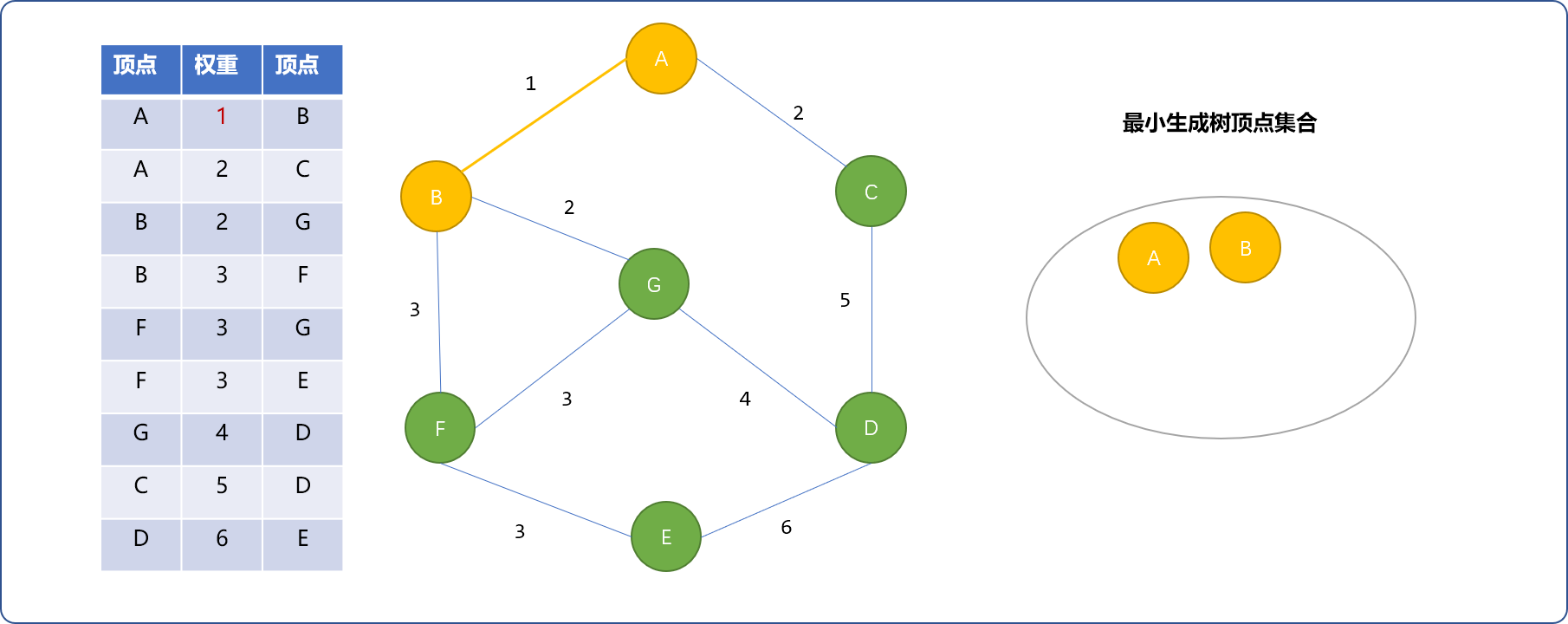
贪心思想:选择权重最小的值为
1的边(A,B)加入到最小生成树集合中。并查集思想:刚开始,
A和B两顶点不在同一集合,A和B合并。
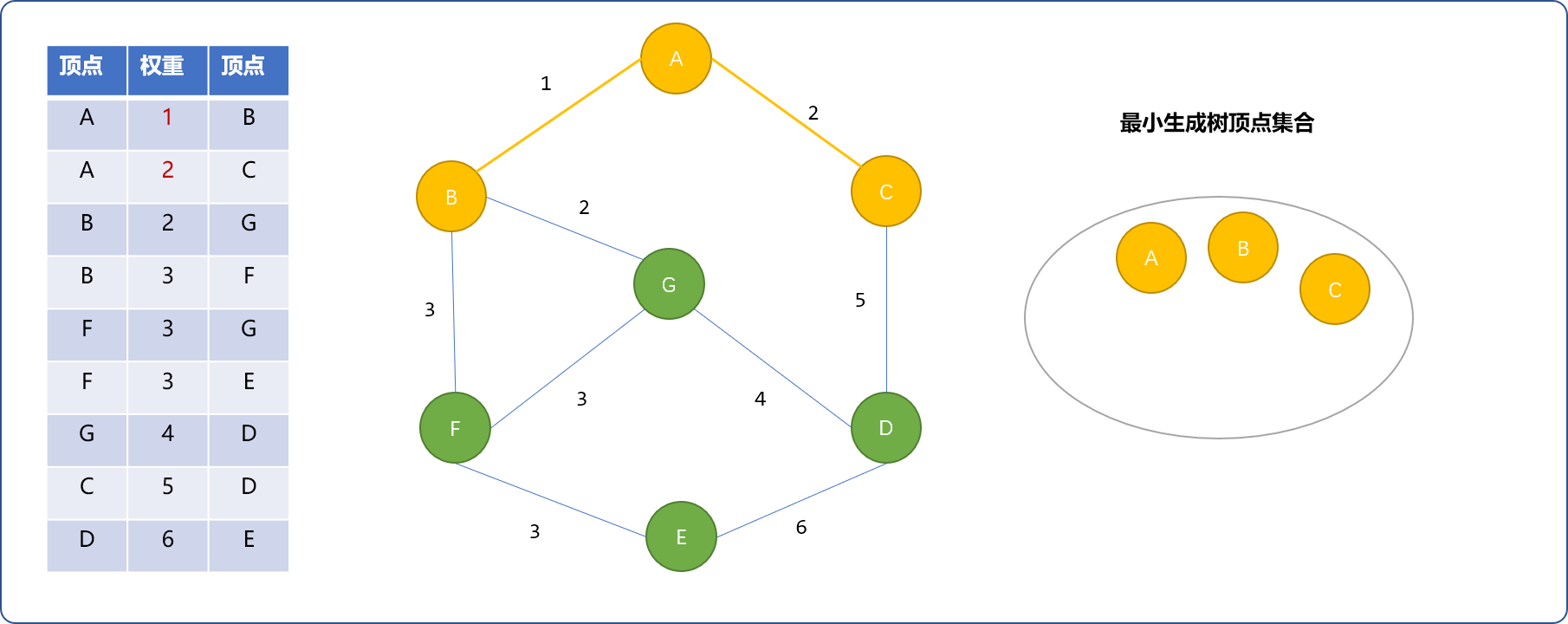
- 现在权重为
2的边有(A,C)和(B,G),选择(A,C)边。C不在最小生成树顶点集合中,可以加入。
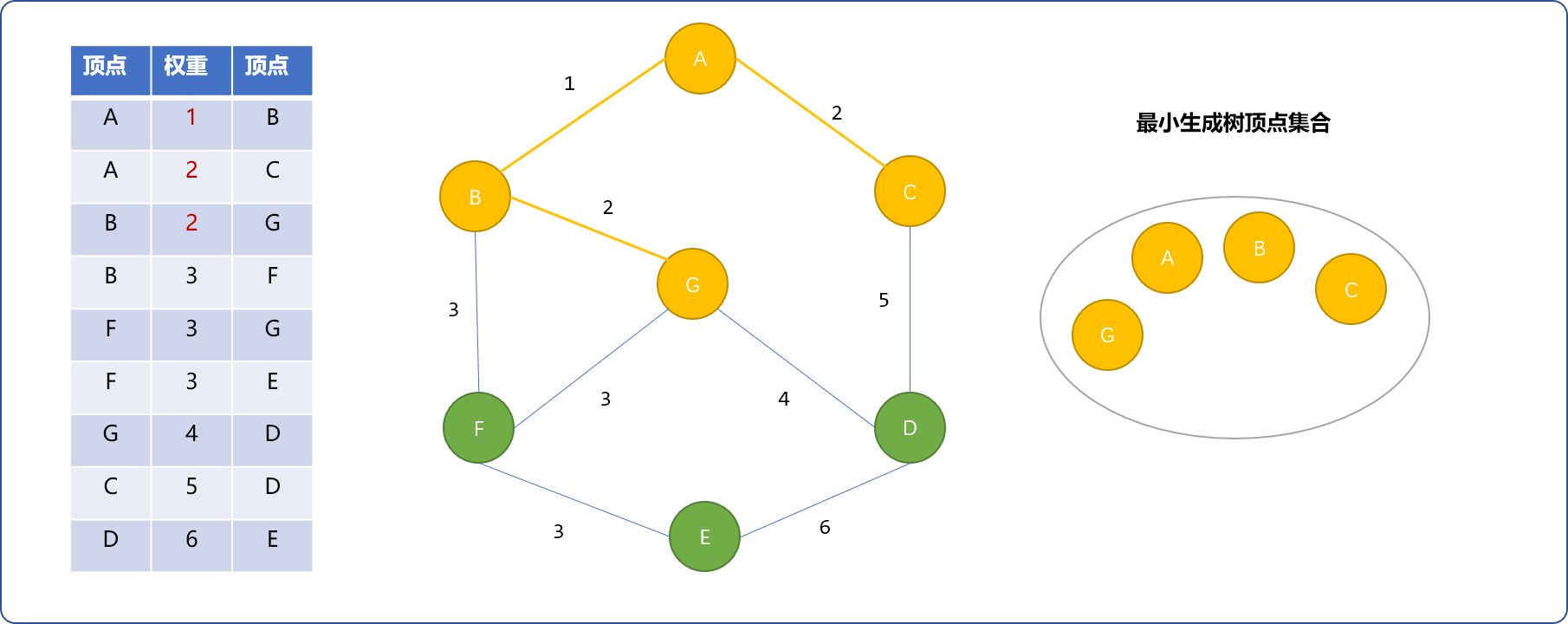
- 再选择
(B,G)。B在最小生成树顶点集合中,G不在,分属2个不同集合,将G加入。
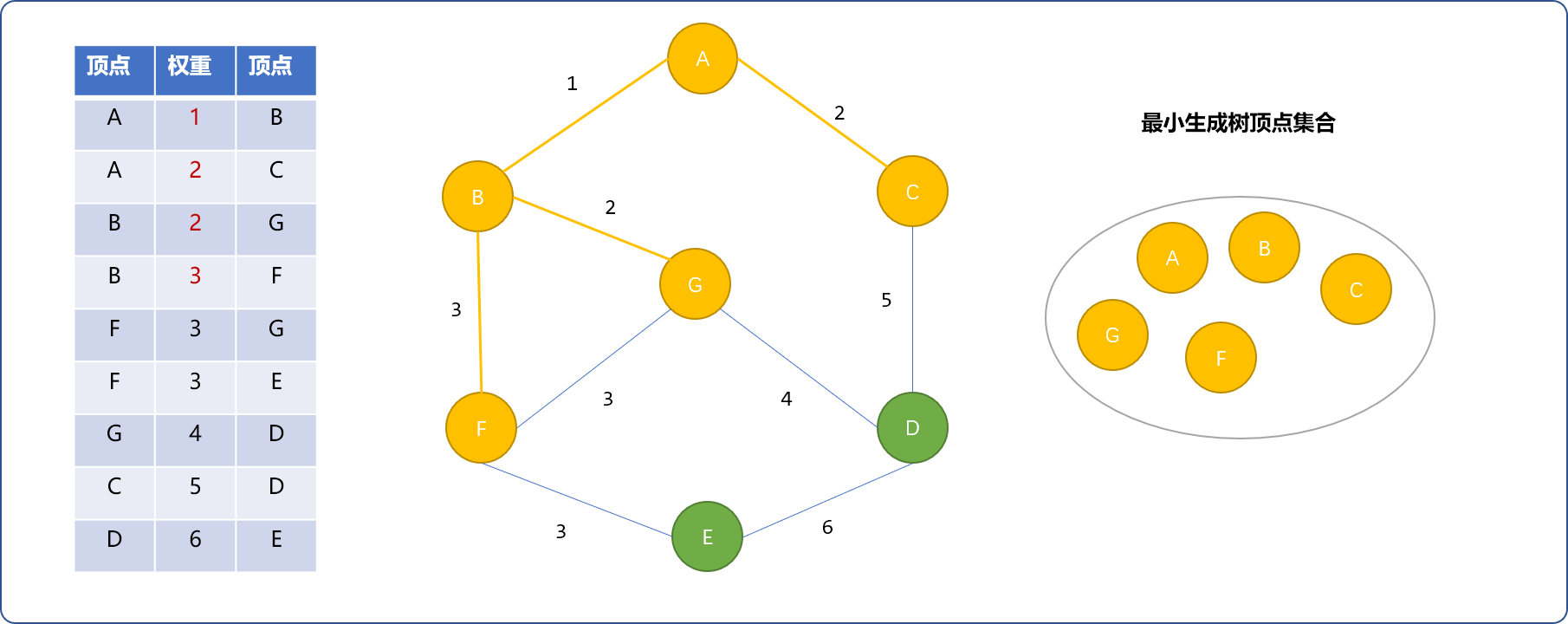
- 权重为
3的边有3条。选择(B,F)。如下图,F加入最小生成树。
- 权重为
3的(F,G)边不能选择。因为F、G已经在同一个集合中。选择(F,E),E加入最小生成树集合中。
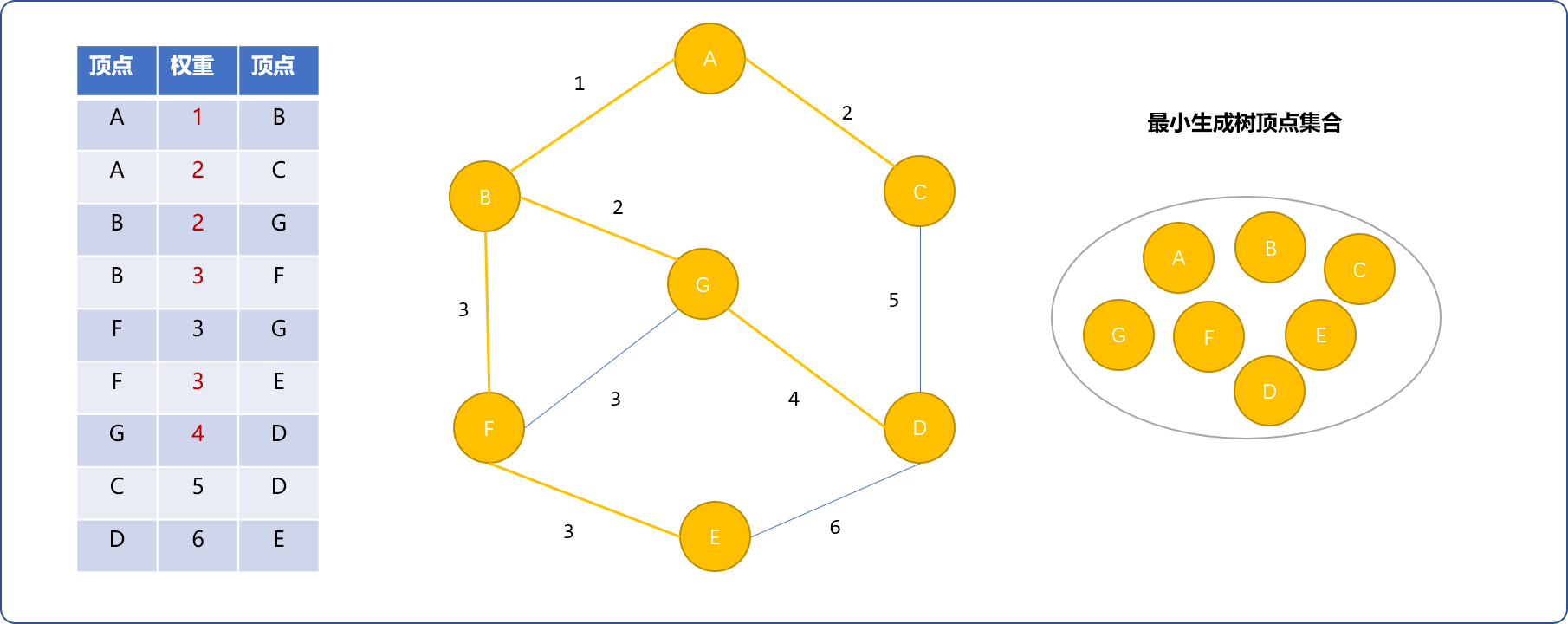
- 继续选择权重值为
4的(G,D)边。D可以加入最小生成树。之后,因为C、D、E已经存在于最小生成树中,(C,D)和(D,E)边不能加入集合中。至此,最小生成树已经完成,且最小生成树的权重之和为15。
2.1 编码实现
为了让算法具有通用性,下面使用OOP组织代码。程序中有 2 个核心类:
- 树类。
- 并查集类。
除此之外,还有辅助类。
2.1.1 树类实现
描述树结构。算法中要用到并查集数据结构,并查集是基于树单位的数据结构。
顶点类: 用来描述树或图的顶点结构。
#include <iostream>
#include <map>
#include <vector>
#include <queue>
using namespace std;
/*
*顶点类型
*/
template<typename T>
struct Vertex {
//编号
int code;
//值
T value;
//前驱(父)指针
Vertex<T>* preVertex;
//无论是图,还是树,都有多个后驱(子)结点
map<Vertex<T>*,int> childs;
Vertex() {
this->code=-1;
this->preVertex=NULL;
}
Vertex(int code,T value) {
this->code=code;
this->preVertex=NULL;
this->value=value;
}
/*
* 添加子结点及与其权重
*/
Vertex<T>* addChild(Vertex<T>* vertex,int weight=1) {
this->childs[vertex]=weight;
}
/*
*重载 == 运算符
*/
bool operator==(Vertex<T>* vertex) {
return this->code==vertex->code && this->value==vertex->value;
}
/*
*重载 < 运算符
*/
bool operator<(Vertex<T>* vertex) {
return this->code<vertex->code;
}
/*
*输出结点信息
*/
int desc() {
cout<<"结点名称:"<<this->value<<endl;
typename::std::map<Vertex<T>*,int>::iterator begin=this->childs.begin();
typename::std::map<Vertex<T>*,int>::iterator end=this->childs.end();
if(begin==end)cout<<"\t叶结点"<<endl;
int weight=0;
//查找子结点
while(begin!=end) {
Vertex<T>* child=begin->first;
cout<<"\t子结点名称:"<<child->value<<"权重:"<<begin->second<<endl;
weight+=begin->second;
begin++;
}
return weight;
}
};
树类: 提供维护树顶点的函数。
template<typename T>
class Tree {
private:
//根结点
Vertex<T>* root=NULL;
//存储所有结点
vector<Vertex<T>*> vertexs;
//大小
int size=0;
//树的权重之和
int totalWeight=0;
public:
Tree() {
}
Tree(Vertex<T>* root) {
this->setRoot(root);
this->vertexs.push_back(this->root);
}
Tree(T val) {
//编号从 1 开始
this->size++;
this->root=new Vertex<T>(this->size,val);
this->vertexs.push_back(this->root);
}
//重置根结点
void setRoot(Vertex<T>* root) {
this->root=root;
}
/*
*返回根结点
*/
Vertex<T>* getRoot() {
return this->root;
}
/*
*返回树中所有结点
*/
vector<Vertex<T>*> getVertexs() {
return this->vertexs;
}
/*
*根据值查找结点是否存在
*/
Vertex<T>* findVertex(T value) {
for(int i=0; i<this->size; i++) {
if(this->vertexs[i]->value==value )return this->vertexs[i];
}
return NULL;
}
/*
*查找结点是否存在
*/
Vertex<T>* findVertex(Vertex<T>* ver) {
for(int i=0; i<this->vertexs.size(); i++) {
if(this->vertexs[i]==ver )return this->vertexs[i];
}
return NULL;
}
/*
* 根据节点值返回此树的根节点
* 算法中,需要根据元素得知其所在的树
* 根结点是每一棵树的唯一标志符
*/
Vertex<T>* getRoot(T value) {
if(this->findVertex(value)!=NULL)return this->root;
}
/*
*添加结点
*/
bool addVertex(Vertex<T>* ver) {
if( this->findVertex(ver)==NULL) {
//没有,添加
this->vertexs.push_back(ver);
//成功
return true;
}
return false;
}
/*
*合并另一颗树中的结点
*/
void unionTree(Tree<T>* tree) {
//另一棵树的所有结点
vector<Vertex<T>*> vers=tree->getVertexs();
for(int i=0; i<vers.size(); i++)
//合并
this->vertexs.push_back(vers[i]);
//修改数量
this->size+=vers.size();
}
/*
*显示树中所有结点
*/
void showAll() {
cout<<"------------树 "<<this->root->value<<"------------"<<endl;
for(int i=0; i<this->vertexs.size(); i++) {
this->totalWeight+=this->vertexs[i]->desc();
}
cout<<"------------最小生成树的权重 "<<this->totalWeight<<"------------"<<endl;
}
};
2.2.2 实现kruskal算法
本质是使用并查集合并指定边两端的顶点。
//描述图中顶点与顶点之间的关系
template<typename T>
struct Edge {
T from;
T to;
int weight;
};
/*
* Kruskal 算法
*/
template<typename T>
class Kruskal {
private:
//集合群(森林)
map<Vertex<T>*,Tree<T>*> trees;
//森林中树的数量
int size;
public:
/*
*构造集合(森林)群
*/
Kruskal(T datas[],int size) {
this->size=size;
this->initSets(datas);
}
/*
*初始化森林
*/
void initSets(T datas[]) {
for(int i=0; i<this->size; i++ ) {
//创建只有根结点的树
Tree<T>* tree=new Tree<T>(datas[i]);
//存入集合群
this->trees[tree->getRoot()]=tree;
}
}
/*
* 通过节点值查找其所在的树(集合)
* 返回树的根结点(唯一标志符)
*/
Vertex<T>* find(T value) {
typename::std::map<Vertex<T>*,Tree<T>*>::iterator begin=trees.begin();
typename::std::map<Vertex<T>*,Tree<T>*>::iterator end=trees.end();
while(begin!=end) {
Tree<T> *tree=begin->second;
Vertex<T>* root=tree->getRoot(value);
if(root!=NULL)return root;
begin++;
}
return NULL;
}
/*
*合并树
*/
bool unionSet(T from,T to,int weight=1) {
Vertex<T>* root =this->find(from);
Vertex<T>* root_ =this->find(to);
//同一棵树
if(root==root_)return false;
Vertex<T>* ver=this->trees[root]->findVertex(from);
Vertex<T>* ver_=this->trees[root_]->findVertex(to);
//合并两个顶点
ver->addChild(ver_,weight);
//合并树
this->trees[root]->unionTree(this->trees[root_] );
//删除
this->trees.erase(root_);
this->size--;
}
/*
*查找最小生成树
*/
void kruskal_(Edge<T> relation[]) {
for(int i=0; i<sizeof(relation)/sizeof(T); i++) {
this->unionSet(relation[i].from,relation[i].to,relation[i].weight);
}
}
/*
*输出最小生成树
*/
void showAllTree() {
typename::std::map<Vertex<T>*,Tree<T>*>::iterator begin=trees.begin();
typename::std::map<Vertex<T>*,Tree<T>*>::iterator end=trees.end();
while(begin!=end) {
Vertex<T>* root=begin->first;
Tree<T> *tree=begin->second;
tree->showAll();
begin++;
}
}
};
测试: 简化了图的描述,直接提供已经排序的信息,侧重测试算法设计是否准确。
int main(int argc, char** argv) {
char datas[7]= {'A','B','C','D','E','F','G'};
//硬代码,对图中的边按权重由小到大排序
Edge<char> relations[9]= { {'A','B',1}, {'A','C',2},{'B','G',2},{'B','F',3},{'F','G',3},{'F','E',3},{'G','D',4},{'C','D',5},{'D','E',6} };
//初始算法
Kruskal<char> kruskal(datas,7);
kruskal.kruskal_( relations);
kruskal.showAllTree();
return 0;
}
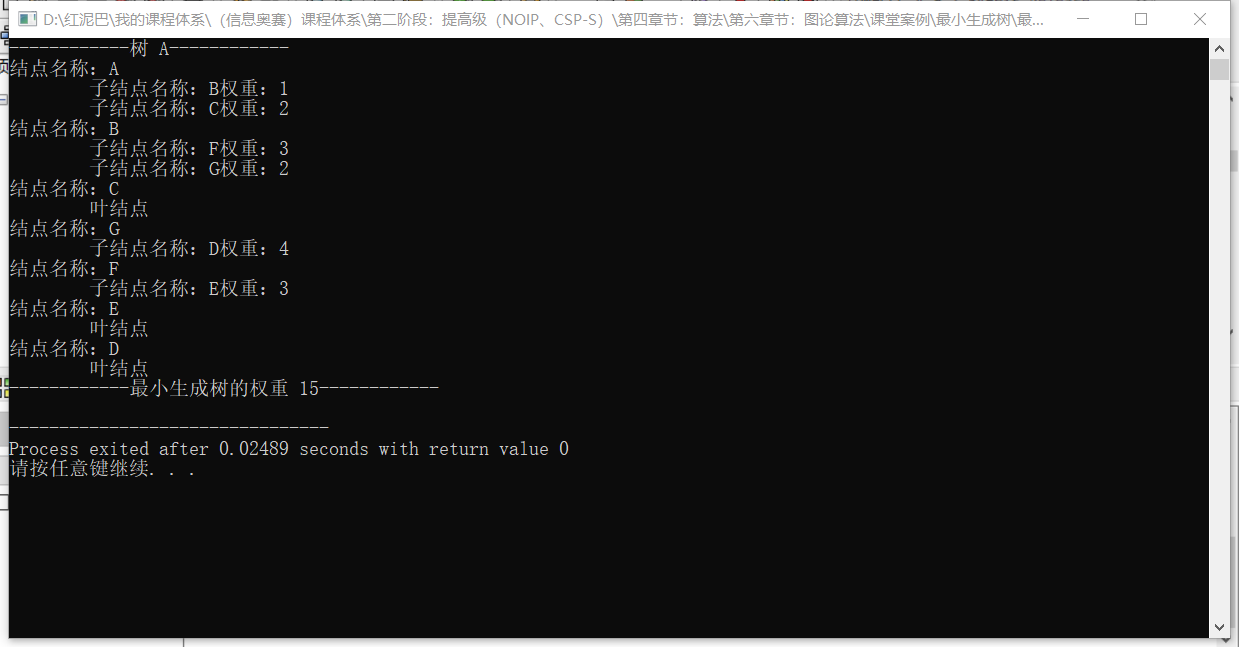
输出结果:和前文演示结果一致。
3. Prim(普里姆) 算法
Prim算法核心也是贪心思想,算法流程类似于最短路径算法Dijkstra算法。
相比较于kruskal,前者基于静态信息(提前对边按权重排序),后者基于动态信息(由优先队列随时调整)。
3.1 算法流程
如查询如下图结构的最小生成树。
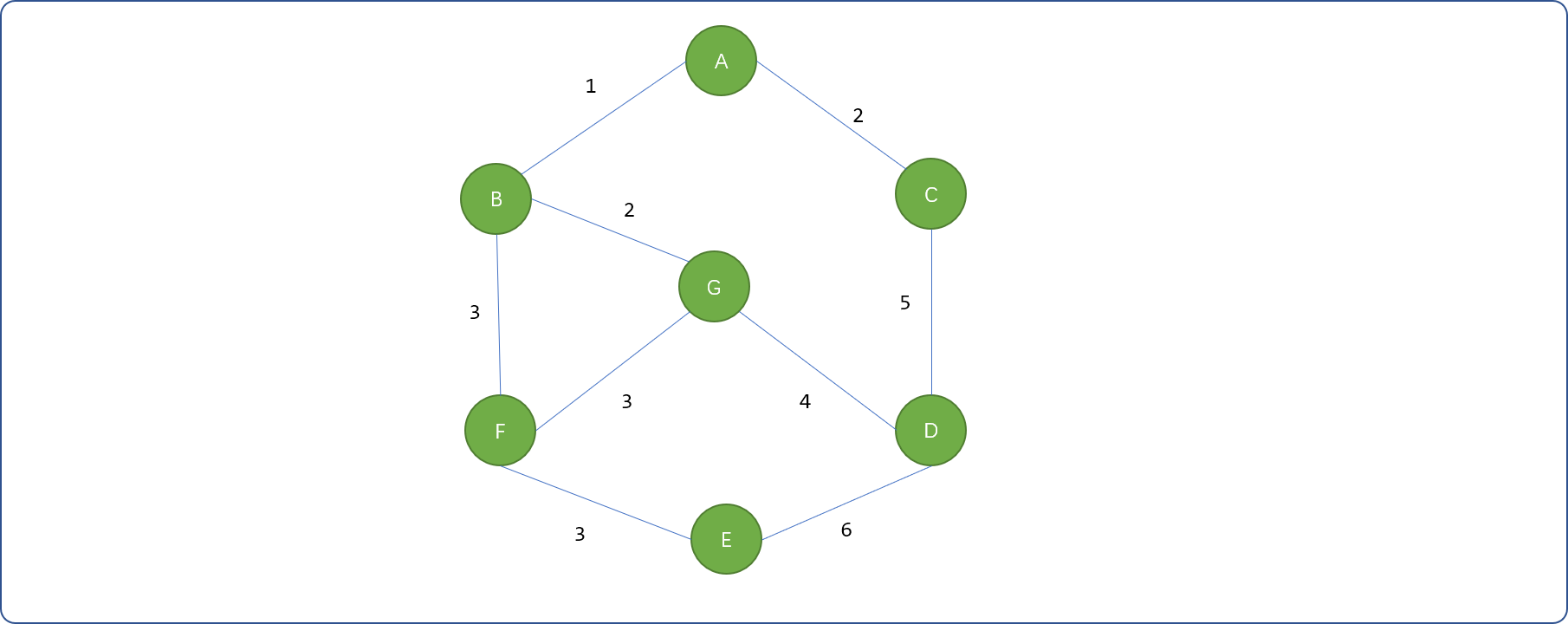
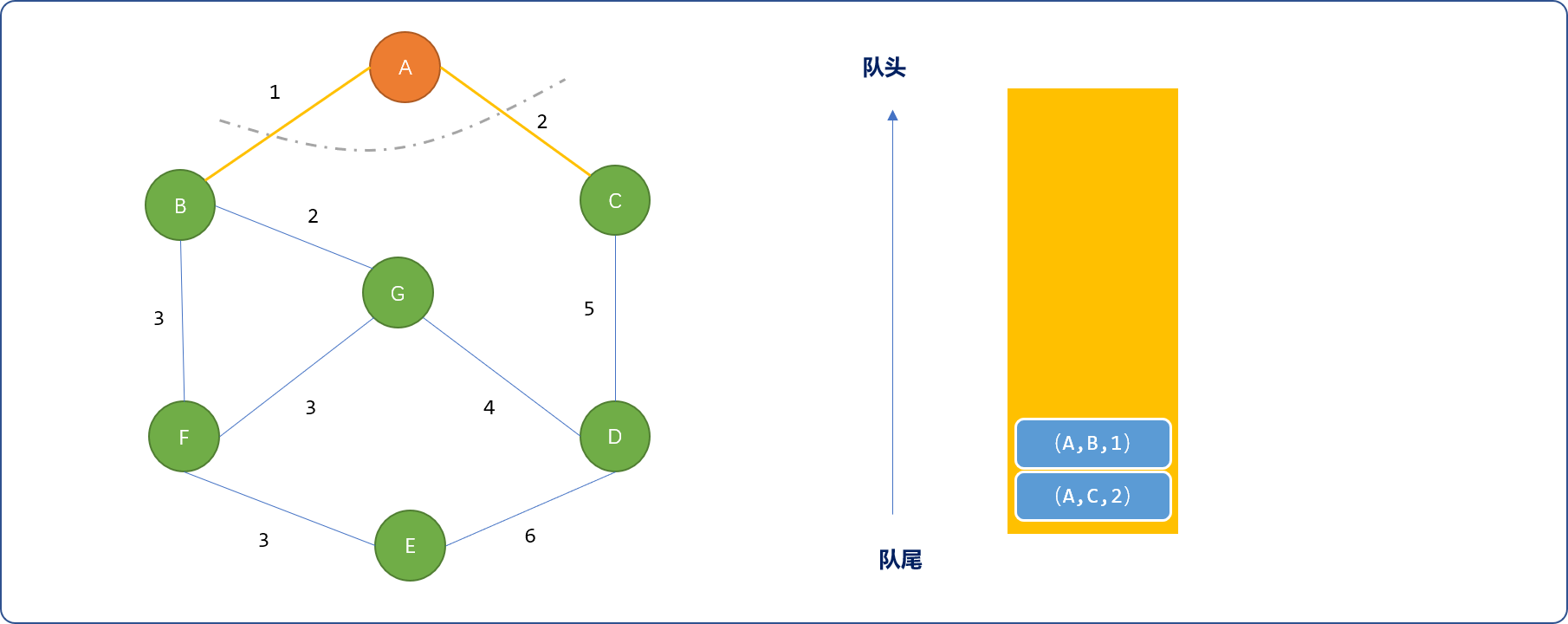
- 任意选择一顶点,如
A。然后把与此顶点相邻的边(A,B,1)、(A,C,2)压入到优先队列中,优先队列以边的权重小为优先。如下图所示。
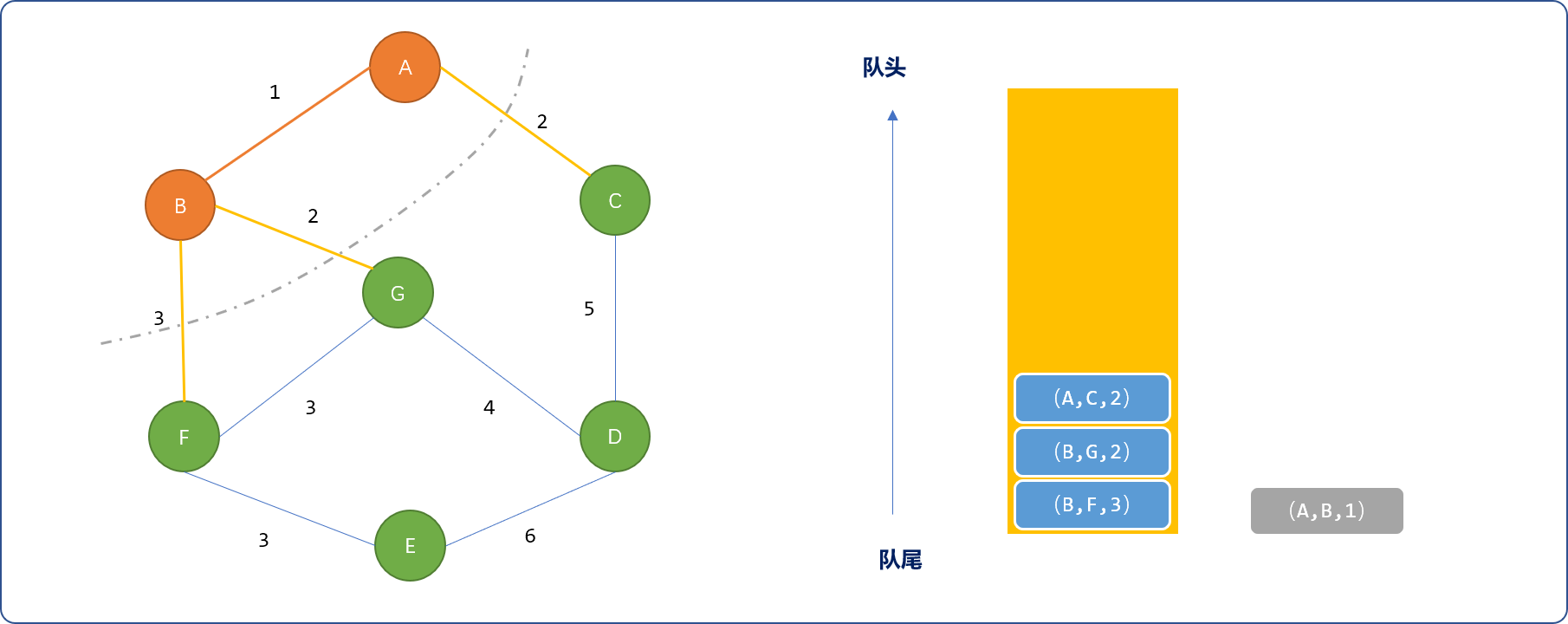
- 从优先队列中选择
(A,B,1)这条边,检查边两端的顶点是否已经被选择,选择B顶点。然后把B相邻的邻接边(B,G,2)、(B,F,3)压入到优先队列。
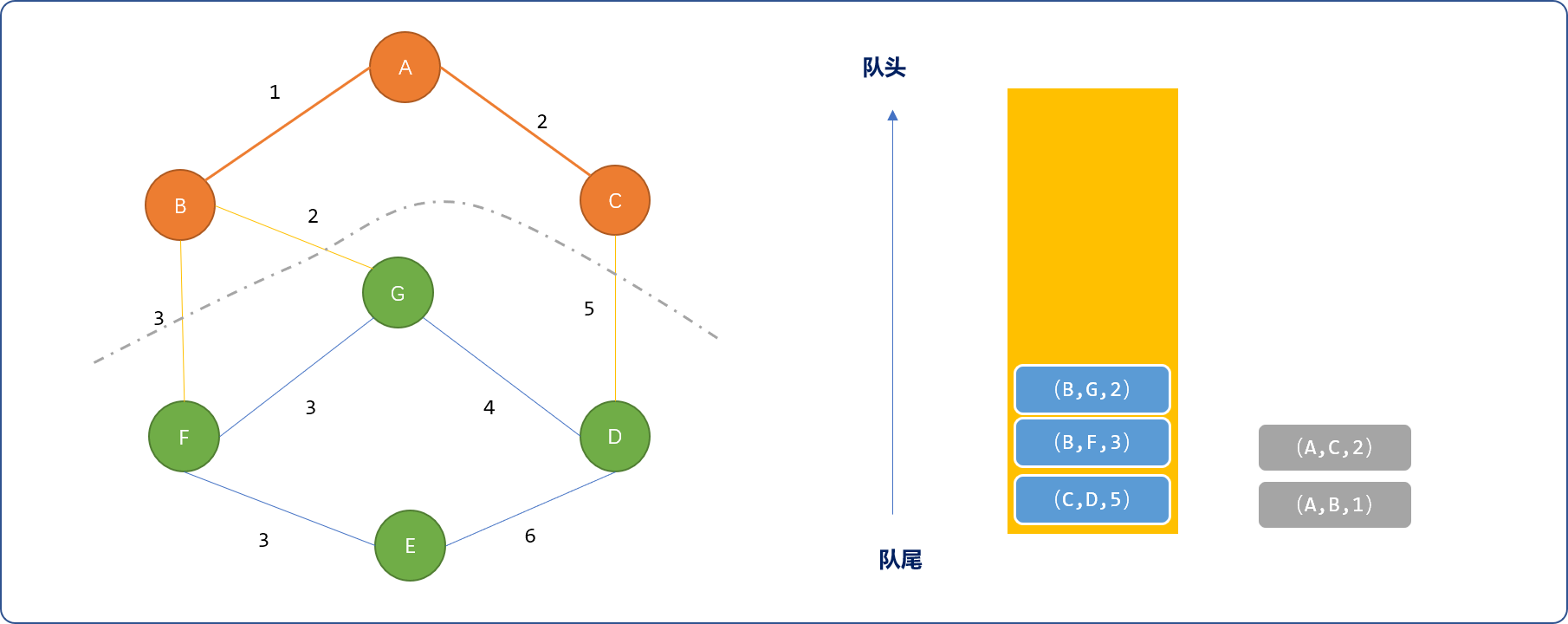
- 从队列中选择
(A,C,2)边,选择C顶点,且把C相邻边(C,D,5)压入队列。
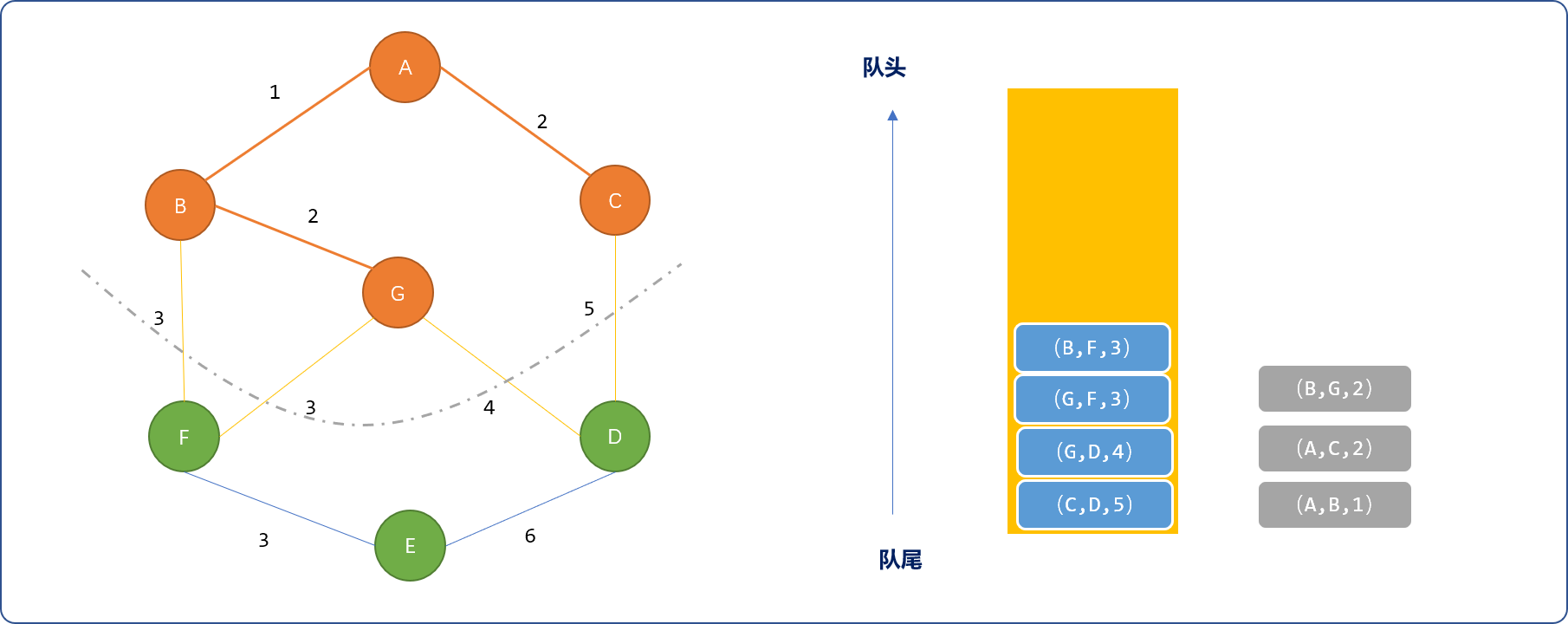
- 选择
(B,G,2)边,选择G顶点,且把(G,F,3)、(G,D,4)压入队列。
- 从队列中选择
(B,F,3),选择F顶点,且压入(F,E,3)边。
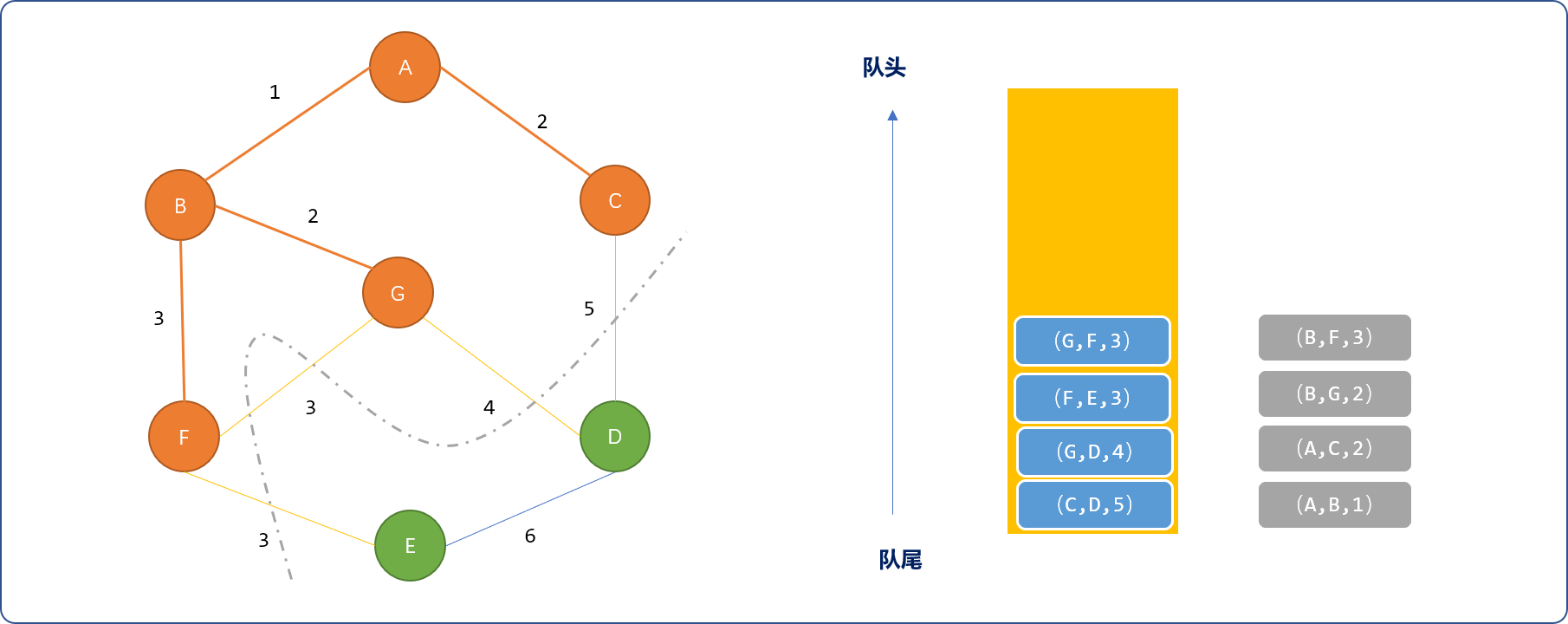
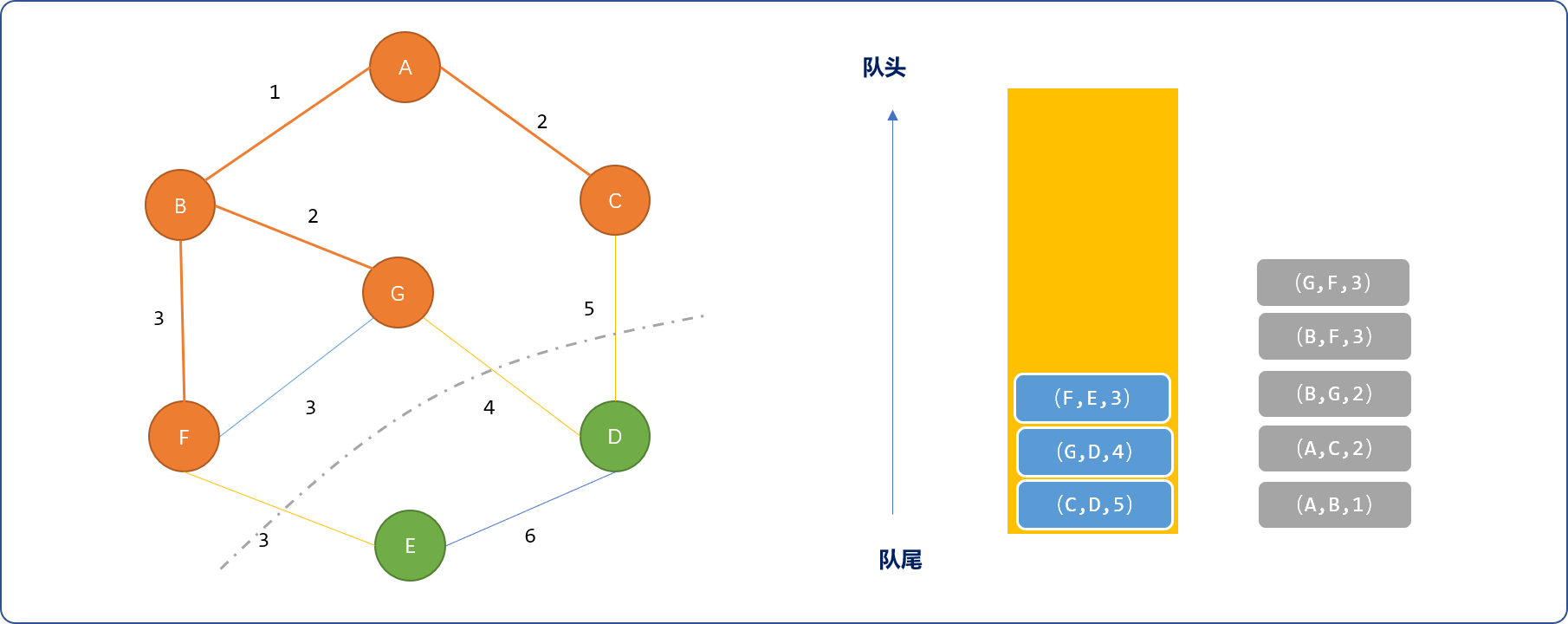
- 选择
(G,F,3)边,因边两端顶点都已经选择,再选择(F,E,3)边,选择E顶点,且把(E,d,6)压入队列。
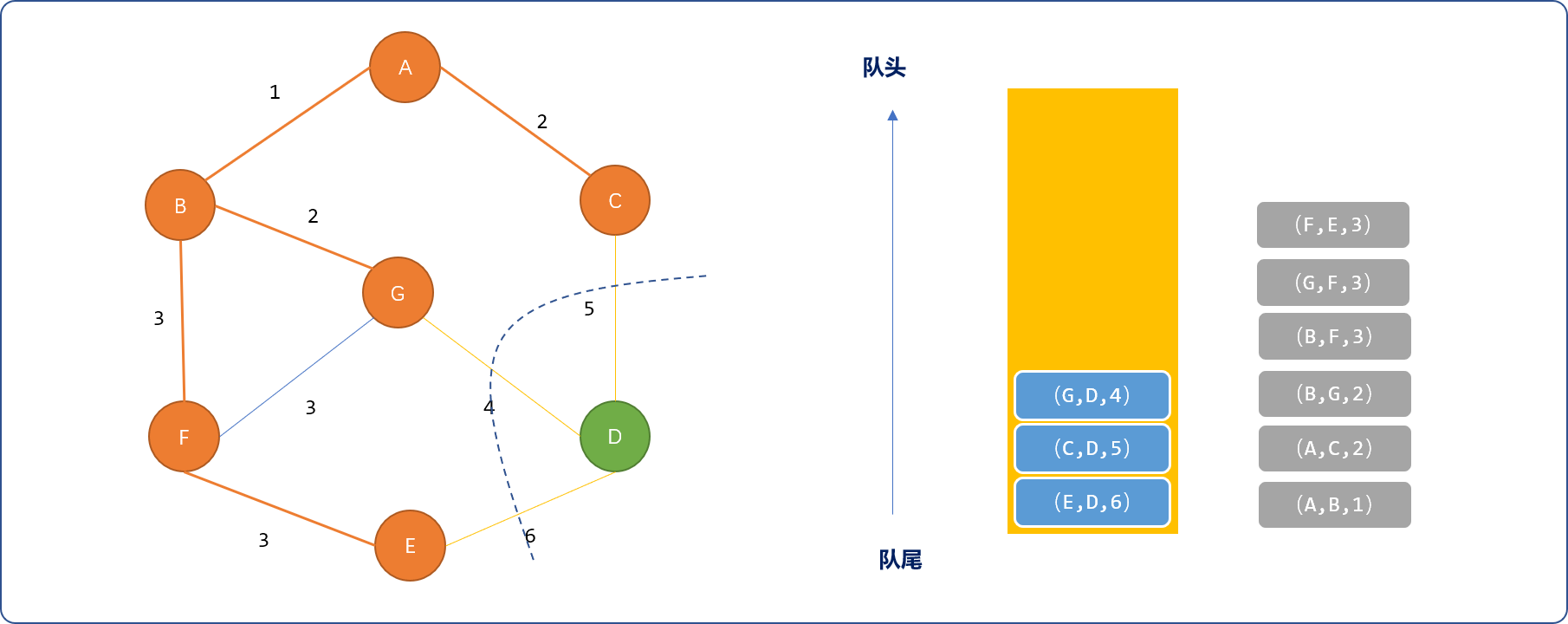
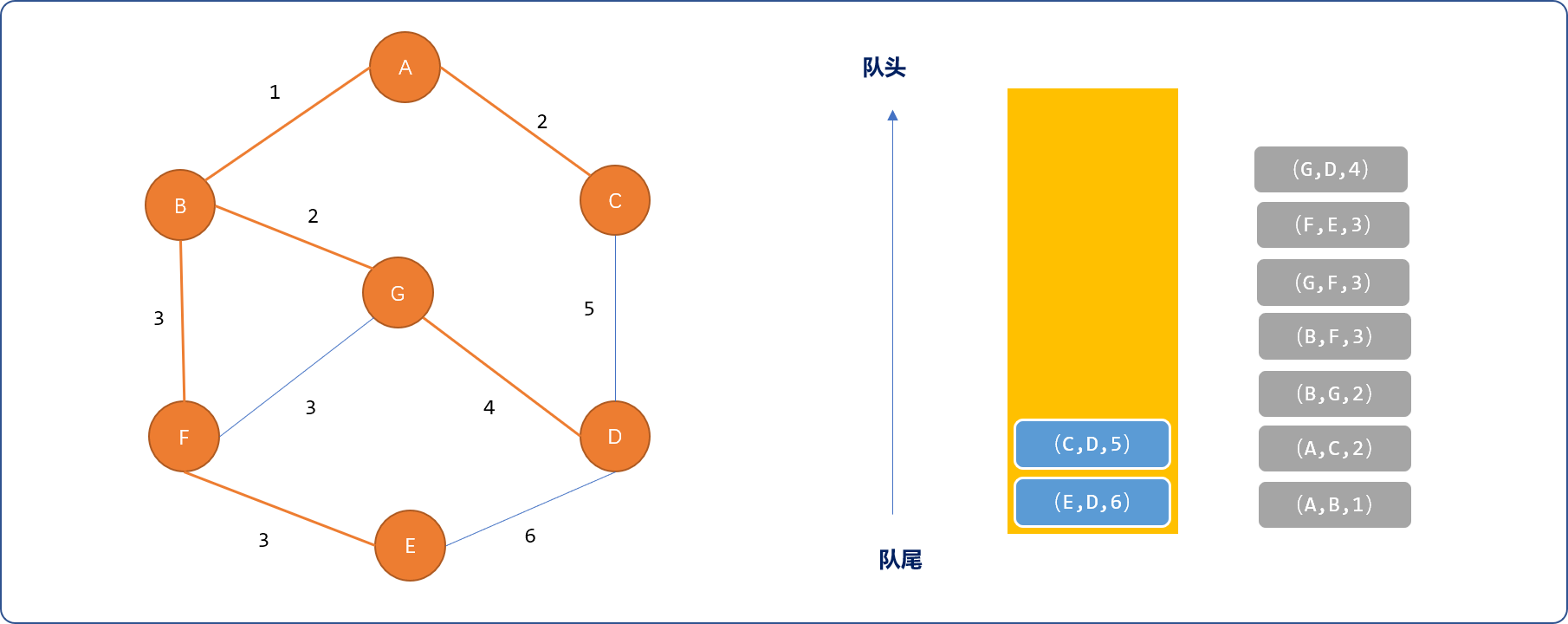
- 最后选择
(G,D,4),选择D顶点,完成最小生成树。
3.2 编码实现
顶点类和树类和前面的kruskal算法一样。
因为需要动态获取边的权重,对边类升级:
template<typename T>
struct Edge {
Vertex<T>* from;
Vertex<T>* to;
int weight;
Edge() {}
Edge(Vertex<T>* from,Vertex<T>* to,int weight) {
this->from=from;
this->to=to;
this->weight=weight;
}
/*
* 用于优先队列的比较法则
*/
bool operator() (Edge<T>* v1, Edge<T>* v2) {
//由小到大排列
return v1->weight > v2->weight;
}
};
Prim 算法类:
/*
*算法类
*/
template<typename T>
class Prim {
private:
//优先队列容器
priority_queue<Edge<T>* ,vector<Edge<T>*>,Edge<T> > priorityQueue;
//图的顶点
map<int,Vertex<T>*> graph;
//图的邻接矩阵
int** martix;
//图的顶点数量
int size;
//最小生成树
Tree<T>* tree;
public:
/*
*构造函数
*/
Prim(T data[],int** martix) {
this->size= sizeof(data)/sizeof(T);
//初始化图顶点
for(int i=1; i<this->size; i++ ) {
Vertex<T>* ver=new Vertex<T>(i,data[i]);
this->graph[ver->code]=ver;
}
//初始化最小生成树
this->tree=new Tree<T>( this->graph[1]);
//图的邻接关系
this->martix=martix;
}
/*
*查找与某顶点邻接的边,并压入队列中
*/
void pushQueue(Vertex<T>* ver) {
int row=ver->code;
Vertex<T>* to=NULL;
for(int i=1; i<this->size; i++) {
if(this->martix[row][i]>0) {
to=this->graph[i];
Edge<T>* edge=new Edge<T>(ver,to,this->martix[row][i]);
//添加边至队列
this->priorityQueue.push(edge);
//标志已经使用
this->martix[row][i]=0;
}
}
}
/*
*核心
*/
void prim() {
//得到最小生成树的根结点
Vertex<T>* from= this->tree->getRoot();
//找到邻接边
this->pushQueue(from);
while( !this->priorityQueue.empty() ) {
//边出队列
Edge<T>* edge = this->priorityQueue.top();
this->priorityQueue.pop();
//把结点添加至树中
if(this->tree->addVertex(edge->from)) {
//查找相邻边
this->pushQueue(edge->from);
}
if(this->tree->addVertex(edge->to)) {
this->pushQueue(edge->to);
edge->from->addChild(edge->to,edge->weight);
}
}
}
void showTree() {
this->tree->showAll();
}
};
测试
int main(int argc, char** argv) {
char datas[8]= {'0','A','B','C','D','E','F','G'};
//邻接矩阵存储顶点之间的关系
int** martix=new int*[8];
martix[0]=new int[8] {0,0,0,0,0,0,0,0};
martix[1]=new int[8] {0,0,1,2,0,0,0,0};
martix[2]=new int[8] {0,1,0,0,0,0,3,2};
martix[3]=new int[8] {0,2,0,0,5,0,0,0};
martix[4]=new int[8] {0,0,0,5,0,6,0,4};
martix[5]=new int[8] {0,0,0,0,6,0,3,0};
martix[6]=new int[8] {0,0,3,0,0,3,0,3};
martix[7]=new int[8] {0,0,2,0,4,0,3,0};
Prim<char> prim(datas,martix);
prim.prim();
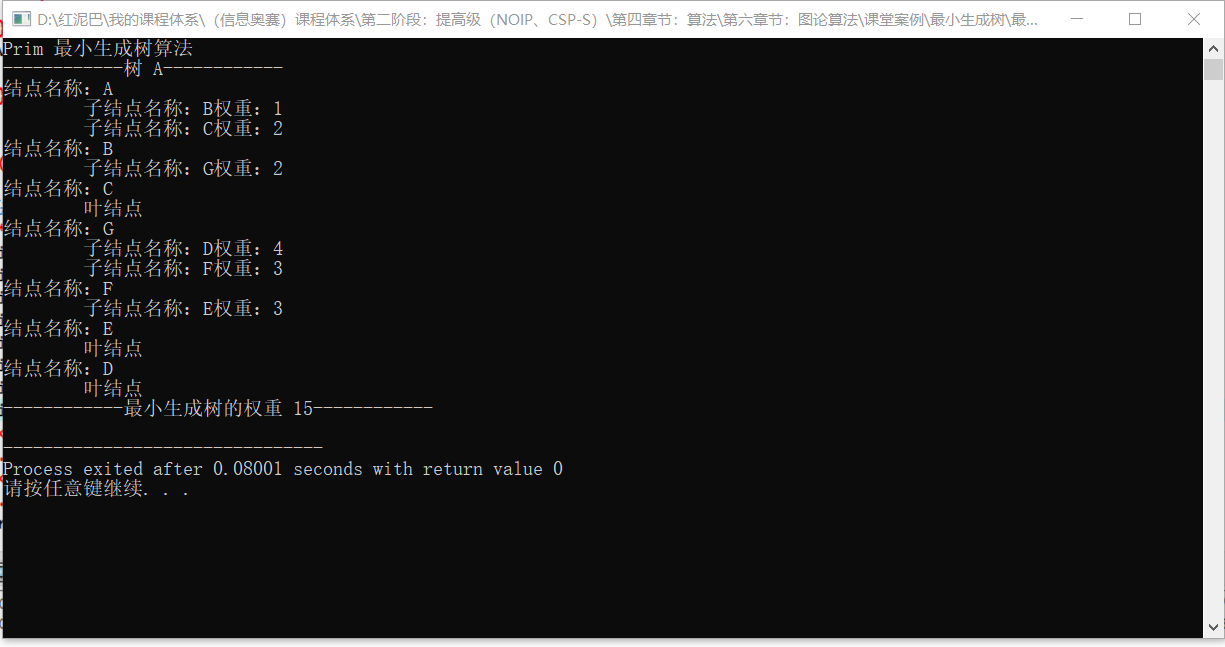
cout<<"Prim 最小生成树算法"<<endl;
prim.showTree();
return 0;
}
输出结果:
4. 总结
kruskal和Prim算法有着同工异曲之地。都是使用贪心思想,保证在构建最小生成树时,每次获得到的权重都是最小的。区别再于,kruskal使用并查集保证顶点唯一性,Prim使用广度优先搜索。