采用M语言对算例进行仿真!!
设置控制对象传递函数:

取采样时间为1ms,采用Z变换将对象离散化,并描述为离散状态方程的形式:
x(k +1)= Ax(k)+ B(u(k)+wk))
y(k)= Cx(k)
带有测量噪声的被控对象输出为:
yv(k)=Cx(k)+ v(k)

控制干扰信号w(k)和测量噪声信号v(k)幅值均为0.10的白噪声信号,输入信号幅值为1.0、频率为1.5Hz的正弦信号。采用卡尔曼滤波器实现信号的滤波,取Q=1,R=1。仿真时间为3s,原始信号及带有噪声的原始信号、原始信号及滤波后的信号和误差协方差的变化分别如图1~ 3所示。仿真结果表明,该滤波器对控制干扰和测量噪声具有很好的滤波作用。
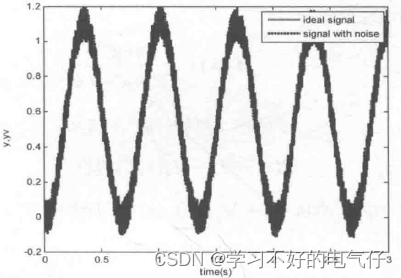
图1 原始信号及带有噪声的原始信号
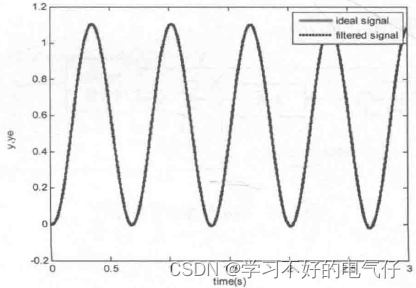
图2 原始信号及滤波后的信号
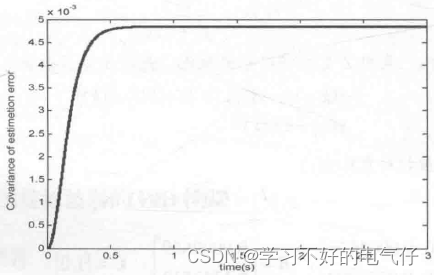
图3 误差协方差的变化
仿真程序:
%Kalman filter
%x=Ax+B(u+w(k));
%y-Cx+D+v(k)
clear all;
close all;
ts=0.001;
M=3000;
%Continuous Plant
a=25;b=133;
sys=tf(b,[1,a,0D);
dsys=c2d(sys,ts,z);
[num.den]=tfdata(dsys,'v');
A1=[0 1;0 -a];
B1=[0;b];
C1=[1 0];
D1=[0];
[A,B,C,D]=c2dm(A1,B1.CI,D1,ts,'zZ);
Q=1; %Covariances of w
R=1; %Covariances of v
P=B*Q*B'; %Initial error covariance
x=zeros(2,1); %Initial condition on the state
ye=zeros(M,1);
ycov=zeros(M,1);
u_1=0;u_2=0;
y_1=0;y_2=0;
for k=1:1;M
time(k)=k*ts;
w(k)=0.10*rands( 1); %Process noise on u
v(k)=0.10*rands(1); %Mcasurement noise on y
u(k)=1.0*sin(2*pi*1.5*k*ts);
u(k)=u(k)+w(k);
y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u1+num(3)*u_2;yv(k)-y(k)+v(k);
%Measurement update
Mn=P*C(C*P*C'+R);P=A*P*A+B*Q*B';P=(eye(2)-Mn*C)*P;
x=A*x+Mn*(yv(k)-C*A*x);
ye(k)-C*x+D; %Filtered value
errcov(k)-C*P*C; %Covariance ofestimation error
%Time update
x=A*x+B*u(k);
u_2=u_1;u_1=u(k);y_2=y_1:y 1=ye(k);
end
figure(1);
plot(time,y,'r, time,yv,k:','linewidth’,2);
xlabel('time(s));ylabel('y.yv')
legend(ideal signal','signal with noise');
figure(2);
plot(time,y,'r,time,ye,'k:' linewidth',2);
xlabel( 'time(s)':ylabel('y, ye')
legend(ideal signal','filtered signal');
figure(3);
plot(time,errcov 'k'. Tinewidth' 2);
xlabel( 'time(s)';ylabel('Covariance of estimation error');