目录
- 1.引言
- 2.框架思路
- 3.图像处理流程化的实现
- 3.1如何解析图像流程数据结构
- 3.2 使用networkx网络图库
- 3.3 python实现
- 4.结论
- 5.python源码
- PS.扩展阅读
- ps1.六自由度机器人相关文章资源
- ps2.四轴机器相关文章资源
- ps3.移动小车相关文章资源
1.引言
在当今AI时代,关于视觉识别似乎已被深度学习所统治,而深度学习是个黑箱,无法看到里面运行的机制,并且它是一个疯狂的吞大数据的野兽,且运行需要极高的CPU或GPU的配置,对于初学者,尤其是手上没有高配置的机器的人,进入视觉识别设置了一道高高的门栏。
机器视觉作为人工智能领域的一个重要分支,正逐渐渗透到工业自动化、智能监控、医疗诊断、自动驾驶等众多领域。机器视觉技术赋予了机器“看”的能力,使得机器能够感知环境、理解图像内容,并做出相应的决策。
对于初学者来说,入门机器视觉可能会感到无从下手,市面上虽然有许多成熟的机器视觉软件,但它们往往价格昂贵,且功能复杂,不够灵活。幸运的是,Python语言以其简洁易懂的特性,结合OpenCV这一强大的计算机视觉库,为初学者提供了一个低成本、高效率的学习平台。

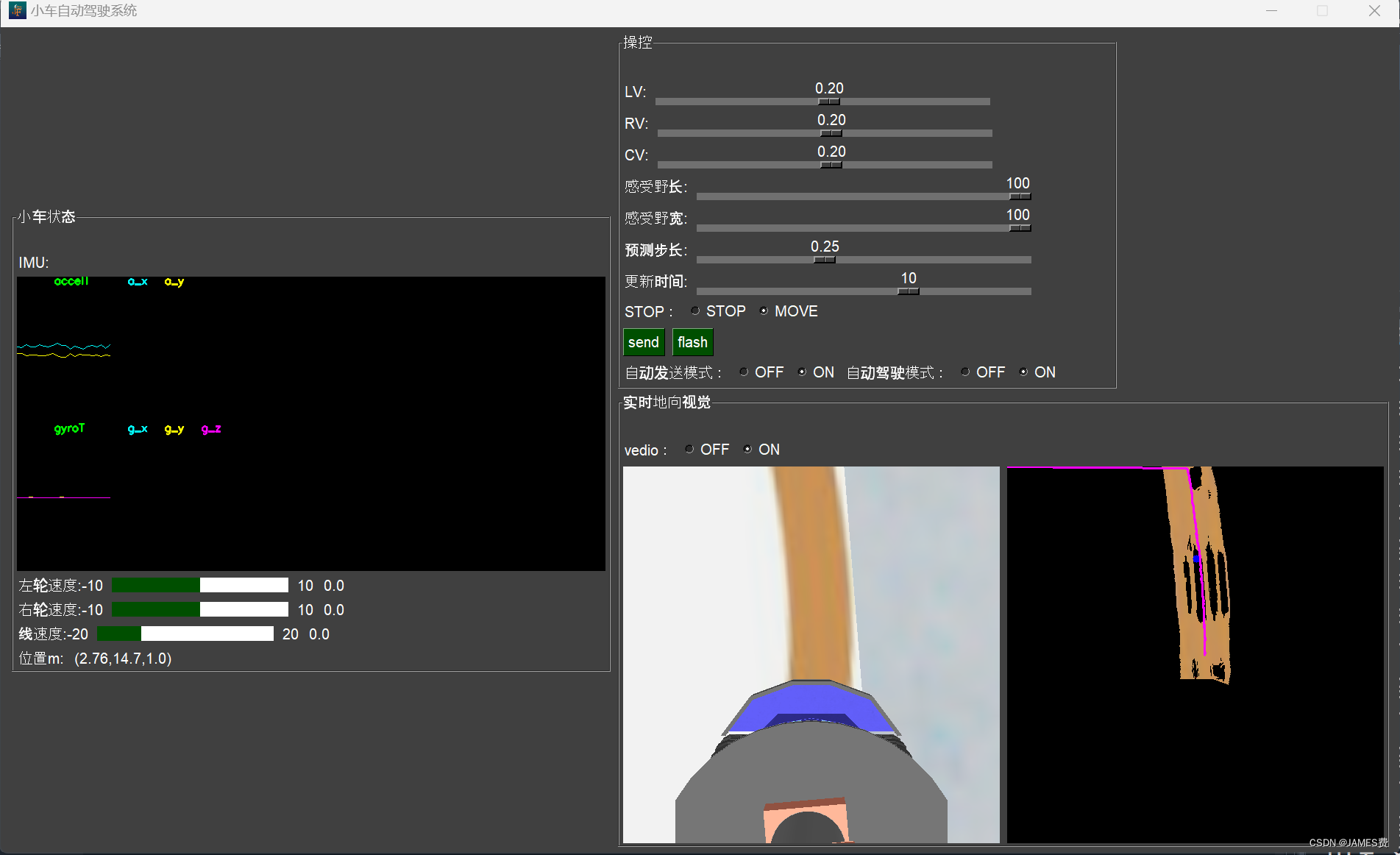
本文将引导读者通过编写一个简易的机器视觉调试工具,来深入理解机器视觉的基本概念和操作流程。我们将从零开始,一步步构建一个基于Python和OpenCV的应用程序,不仅能够帮助初学者快速入门,还能作为进一步探索机器视觉领域的知识储备。
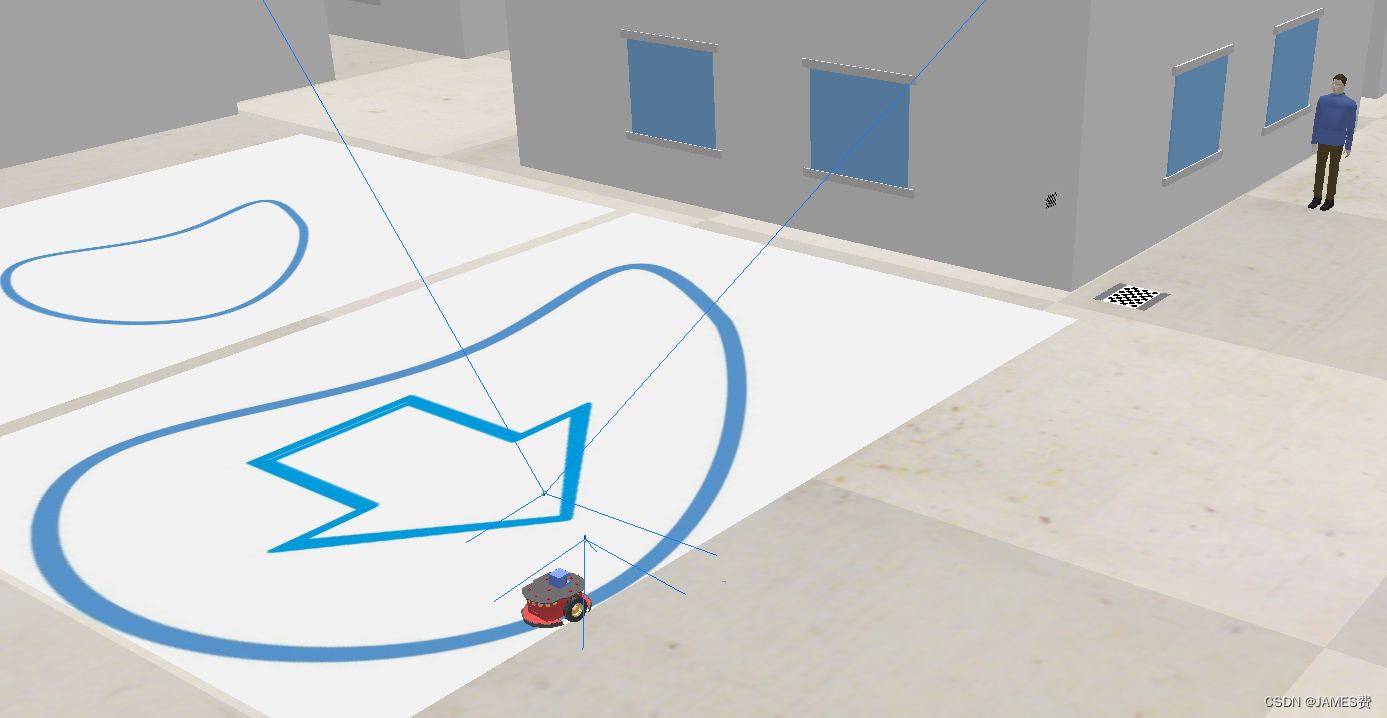
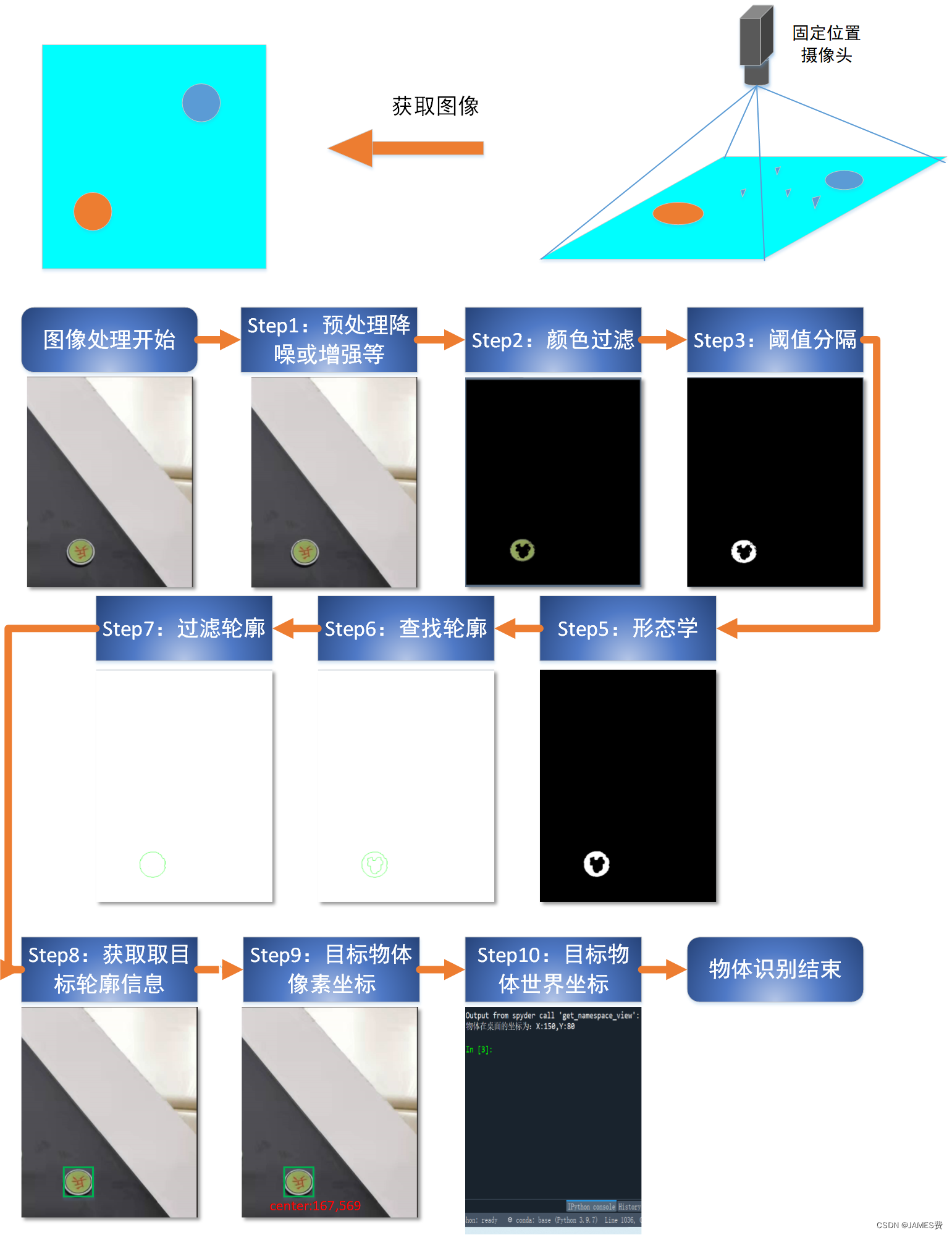
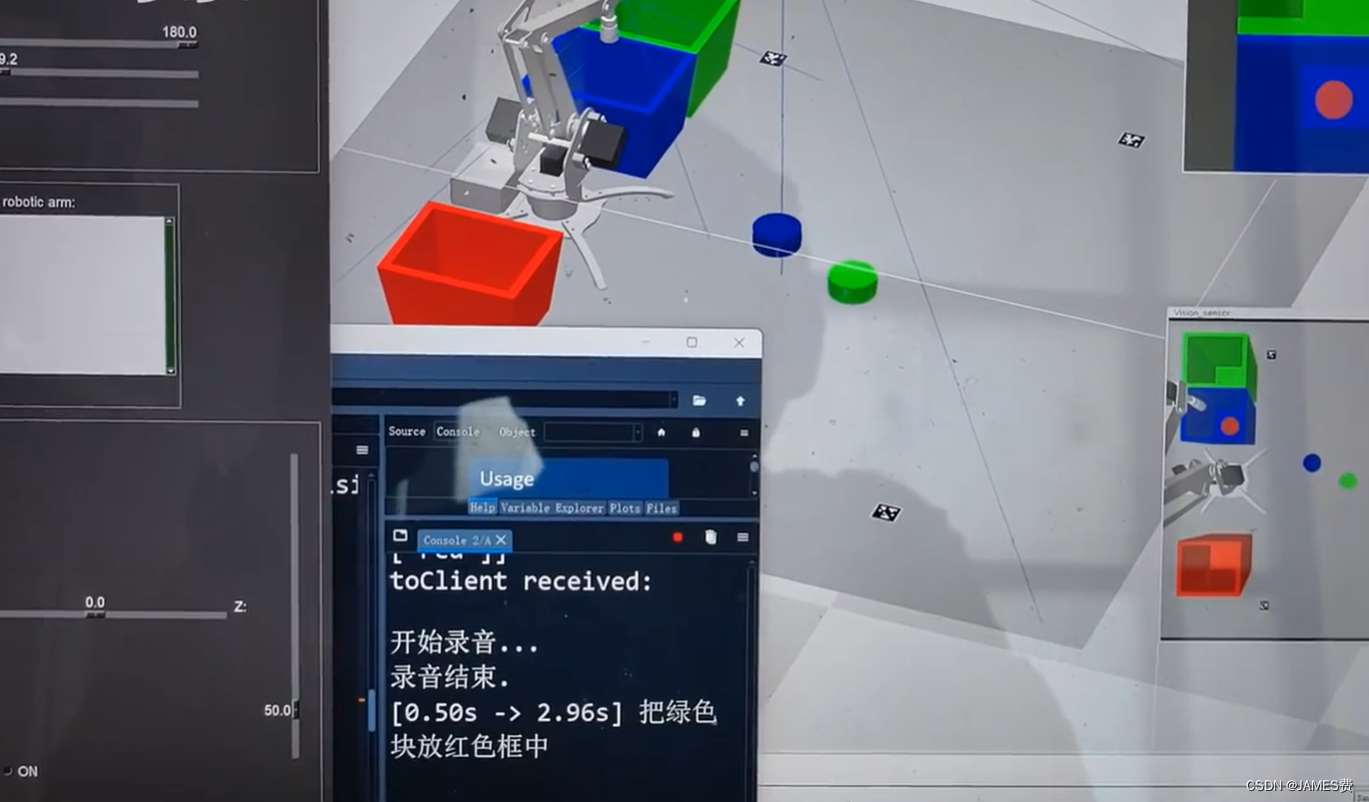
效果如下:

2.框架思路
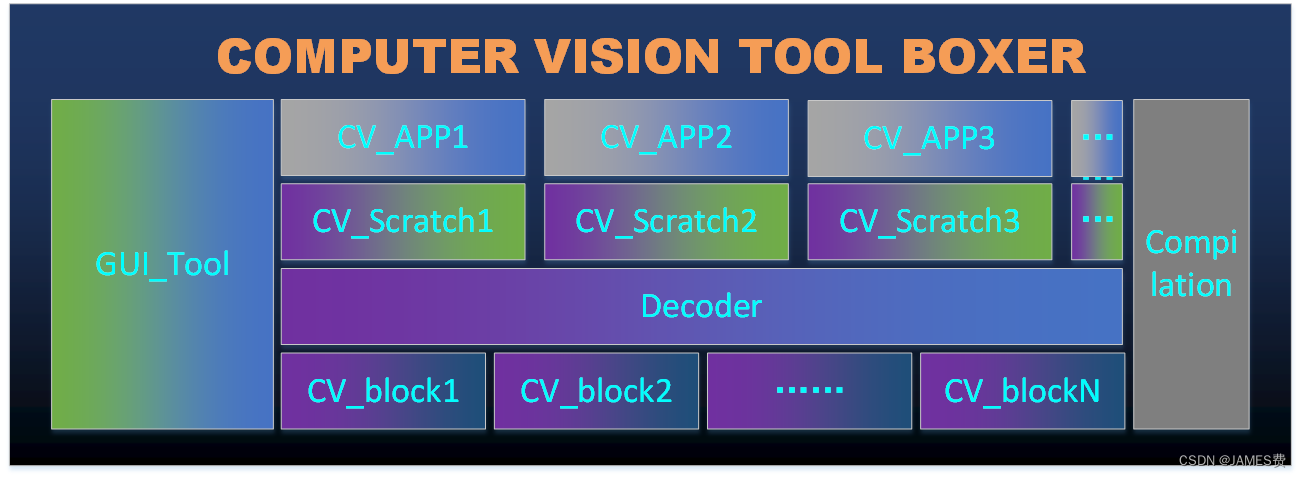
如上所示,我们可以把opencv这个极开源世界优秀视觉处理的知识库,从抽象的代码,变成一条条流程化的知识流,并且利用将超级参数的调整可视化,即视化实现对机器视觉处理模块或算法的快速直观理解,极端时间内建立对算法的“手感”。便于在实际问题中,快速思考获得解决方案。
视觉识别的过程就是一个图像信息的流处理过程:
基于以上思考,可以把我们的调试工具设计成一个类似流水线一样的解读执行过程,就是我们先根据场景特点确定上下游的处理模块,把它们做成一个草图,然后我们的主程序负责把它按流程图执行,并且可以随时打开流水线的某个处理盒子,对参数进行方便的调节。总得来说这个工具应该是这样的:
3.图像处理流程化的实现
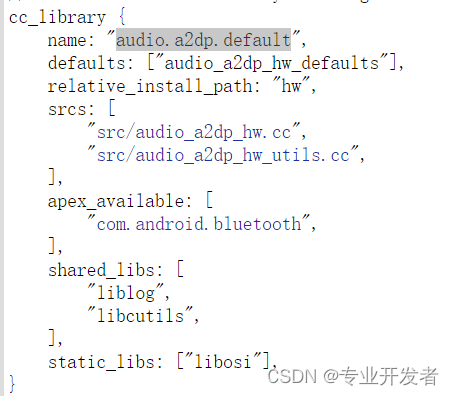
上篇讲到,我们可以用JSON格式来把整个图像处理过程结构化,形成一个树状结构的,把父节点子节点进行上下游关联。然后通过一个对JSON结构解析的一个解析器进行解析,顺序调用相应的opencv图像处理模块,进行流程化处理,最终获得结果。
3.1如何解析图像流程数据结构
这里为了处理图像的流程结构,需要有一些技术手段。特别是涉及到不是单个流程的时候,图像流程数据结构为树状结构有分支,且有很多串联,像这样子:
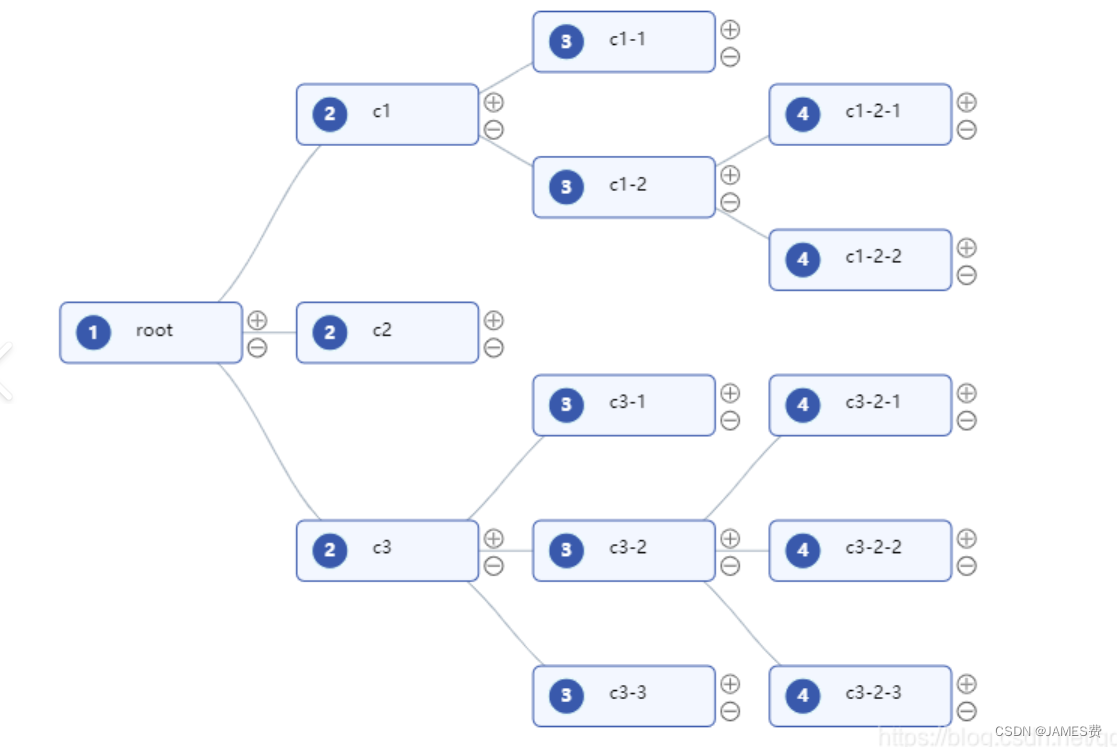
如何去读取这种结构,把图像从节点1,进行按顺序处理,知道节点4。我们选择了一个比较强大的库networkx。
3.2 使用networkx网络图库
以下是大模型对networkx网络图库的解释:
NetworkX 是一个用 Python 编写的开源软件包,用于创建、操作和研究复杂网络的结构、动态和功能。它提供了丰富的数据结构和方法,使得处理网络数据变得简单和直观。以下是 NetworkX 的一些主要特点:多种网络类型:NetworkX 支持多种类型的网络,包括无向图、有向图、多图、加权图等。
丰富的算法:NetworkX 提供了大量用于分析网络的算法,如最短路径、连通性、聚类系数、中心性分析等。
图形绘制:NetworkX 可以与 Matplotlib 等图形库结合使用,方便地绘制网络图形,帮助用户直观地理解网络结构。
数据读取和写入:NetworkX 支持多种数据格式的读取和写入,包括边列表、邻接矩阵、Pickle 文件、GraphML、GML 等。
交互式工具:NetworkX 还提供了一些交互式工具,如网络分析工具箱(NetworkX Toolkit)和网络分析浏览器(NetworkX Explorer)。
扩展性:NetworkX 的设计允许用户根据自己的需求扩展新的功能。
社区支持:NetworkX 是一个活跃的开源项目,拥有一个庞大的用户和开发者社区,提供了大量的文档、教程和示例代码。
跨平台:NetworkX 可以在多种操作系统上运行,包括 Windows、macOS 和 Linux。
NetworkX 广泛应用于社会学、生物学、计算机科学、物理学等领域,用于研究社交网络、生物网络、互联网结构等复杂网络系统。
3.3 python实现
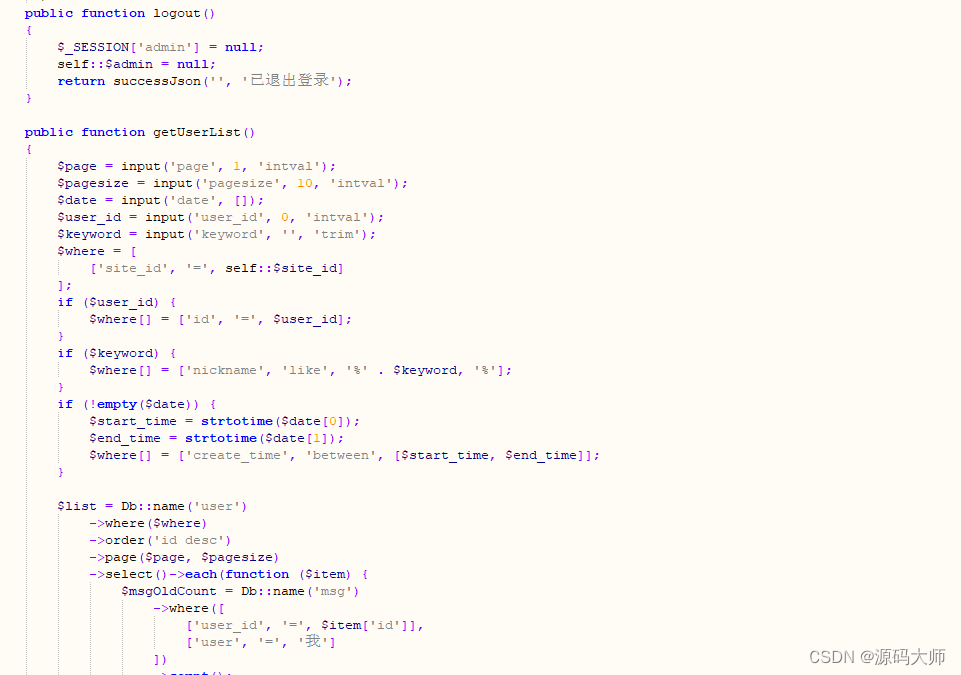
我们利用networkx库的nx.DiGraph() ,有向图结构,把以上JSON格式内的图像从源到处理各分支转变为有向图,问题就解决了一大半。我们可以通过遍历父子节点关系,把流程图转化为图结构,并利用图结构的方法把一条条流程获取出来:
def draw_module(module,layout):
"""
解释并画出模型流程
"""
dG= nx.DiGraph() #有向图
edges=[]
for key in module:
if key[:1]!='@':
if len(module[key]['son']):
for son in module[key]['son']:
edges.append((key,son))
dG.add_edges_from(edges)
for key in module:
if key[:3]=='图像源':
endnodes=[]
searchson(key,module,endnodes)
if len(endnodes):
for b in endnodes:
link=nx.dijkstra_path(dG,key, b)
layout.append([sg.Button(bu) for bu in link])
以上程序中找到一个有效的图像处理链路,是利用了在 NetworkX 库中,nx.dijkstra_path 函数,此函数是用于计算图中从一个源节点到其他所有节点的最短路径。
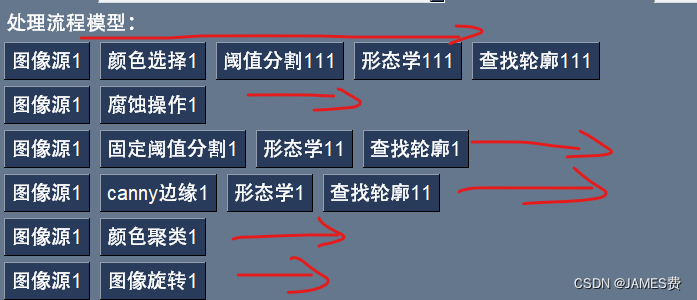
于是就可以生成了如下流程:
4.结论
通过图像处理流程的结构化(或者序列化)我们把图像处理流程的模型进行了持久化,把处理的流程顺序处理模块关系,以及调整的参数都可以进行保存,甚至可以持久保存到硬盘,这样就可以进行经验模型的复用了。还有就是,我们实现了把opencv等视觉处理模型的参数调整进行了可视化套壳,使得抽象的参数变得易于调试,直接看效果,快速掌握参数的作用。在一个是我们巧妙的利用了NetworkX 库,把复杂流程图进行了转化,转化成有向图,并利用最小路径查找,实现了流程的解析。利用这三个方法,我们就可以构建任意符合流程化图像处理的庞大的图像处理库,和图像处理知识模型和参数调试工具。可以助力踏入机器视觉领域的初学者快速积累经验。
5.python源码
关于本工具的源码已上传至资源链接仅供研究学习,未经允许不得商用。
[------------本篇完--------------------------]
PS.扩展阅读
————————————————————————————————————————
对于python机器人编程感兴趣的小伙伴,可以进入如下链接阅读相关咨询
ps1.六自由度机器人相关文章资源
(1) 对六自由度机械臂的运动控制及python实现(附源码)

(2) N轴机械臂的MDH正向建模,及python算法

ps2.四轴机器相关文章资源
(1) 文章:python机器人编程——用python实现一个写字机器人


(2)python机器人实战——0到1创建一个自动是色块机器人项目-CSDN直播
(3)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
(3)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
(4)实现了语音输入+大模型指令解析+机器视觉+机械臂流程打通

ps3.移动小车相关文章资源
(1)python做了一个极简的栅格地图行走机器人,到底能干啥?[第五弹]——解锁蒙特卡洛定位功能-CSDN博客
(2) 对应python资源:源码地址

(3)python机器人编程——差速AGV机器、基于视觉和预测控制的循迹、自动行驶(上篇)_agv编程-CSDN博客
(4)python机器人编程——差速AGV机器、基于视觉和预测控制的循迹、自动行驶(下篇)_agv路线规划原则python-CSDN博客
对应python及仿真环境资源:源码链接