系列目录
前言
只将最重要的知识点考点列出来方便学习复习
目录
- 系列目录
- 前言
- 第1章 微型计算机概述
- 第2章 16位和32位微处理机
- 🌟16位微处理器 8086
- 第3章 Pentium 的指令系统
- 常用指令
- 第4章 存储器、存储管理和高速缓存技术
- 第5章 微型计算机和外设的数据传输
- 第6章 串并行通信和接口技术
- 可编程串行接口
- 8250
- 8251A
- 可编程并行接口
- 8255A
- 第7章 中断控制器
- 第8章 DMA控制器
- 第9章 计数器/定时器和多功能接口芯片
- 第10章 模/数和数/模转换
- 第11~13章 I/O设备
- 第11章 键盘和鼠标
- 第12章 显示器的工作原理和接口技术
- 第13章 打印机的工作原理和接口技术
- 第14章 辅存
- 第14章 软盘、硬盘和光盘子系统
- 第15章 总线
参考教材 《微型计算机技术及应用》
第1章 微型计算机概述
1、微型机的主要特点
1 )体积小、重量轻
2 )价格低廉
3 )可靠性高、结构灵活
4 )应用面广
2、微型计算机的分类
最通常的做法是把微处理器的字长作为微型机的分类标准
1 )4位微处理器
2 )8位微处理器
3 )16位微处理器
4 )32位微处理器
3、微处理机
微处理机即CPU
CPU=运算器+控制器
由算术逻辑部件ALU、控制单元CU、寄存器、中断系统(总线、接口)构成
PS:不同于课本上的细分为ALU、累加器和寄存器组、控制器;个人觉得上面的细分更好
4、微型计算机
(这里讨论的范畴 )微型计算机即计算机
由CPU、存储器、I/O接口和系统总线构成
5、微型计算机系统
以微型计算机为主体,配上系统软件、应用软件和外设,便组成了微型计算机系统
6、微型计算机的性能指标
CPU的位数(字长)
CPU的主频
内存容量和速度
硬盘容量
补充:
字长
又称数据宽度,指CPU能同时处理的数据位数
主频
即CPU的时钟频率
K是kelo的缩写,1K = 2 10 2^{10} 210
M是Mega的缩写,1M = 2 20 2^{20} 220
G是Giga的缩写,1G = 2 30 2^{30} 230
T是Tera的缩写,1T= 2 40 2^{40} 240
第2章 16位和32位微处理机
主要讨论80x86微处理器
1、基本概念
寄存器
32位处理器的工作模式
三种工作模式:实地址模式、保护虚地址模式、虚拟8086模式
实地址模式下,物理地址的计算
逻辑地址 = 段基址:偏移地址
如:1000H:2345H
物理地址 = 段基址 * 16 + 偏移地址
其中,段基址 * 16 相当于十六进制定点数算数左移一位
如:12345H
2、补充
实地址模式下,最多能访问主存储器最低端1MB的存储空间;
对存储器采用分段技术,一个逻辑段的体积最大为64KB
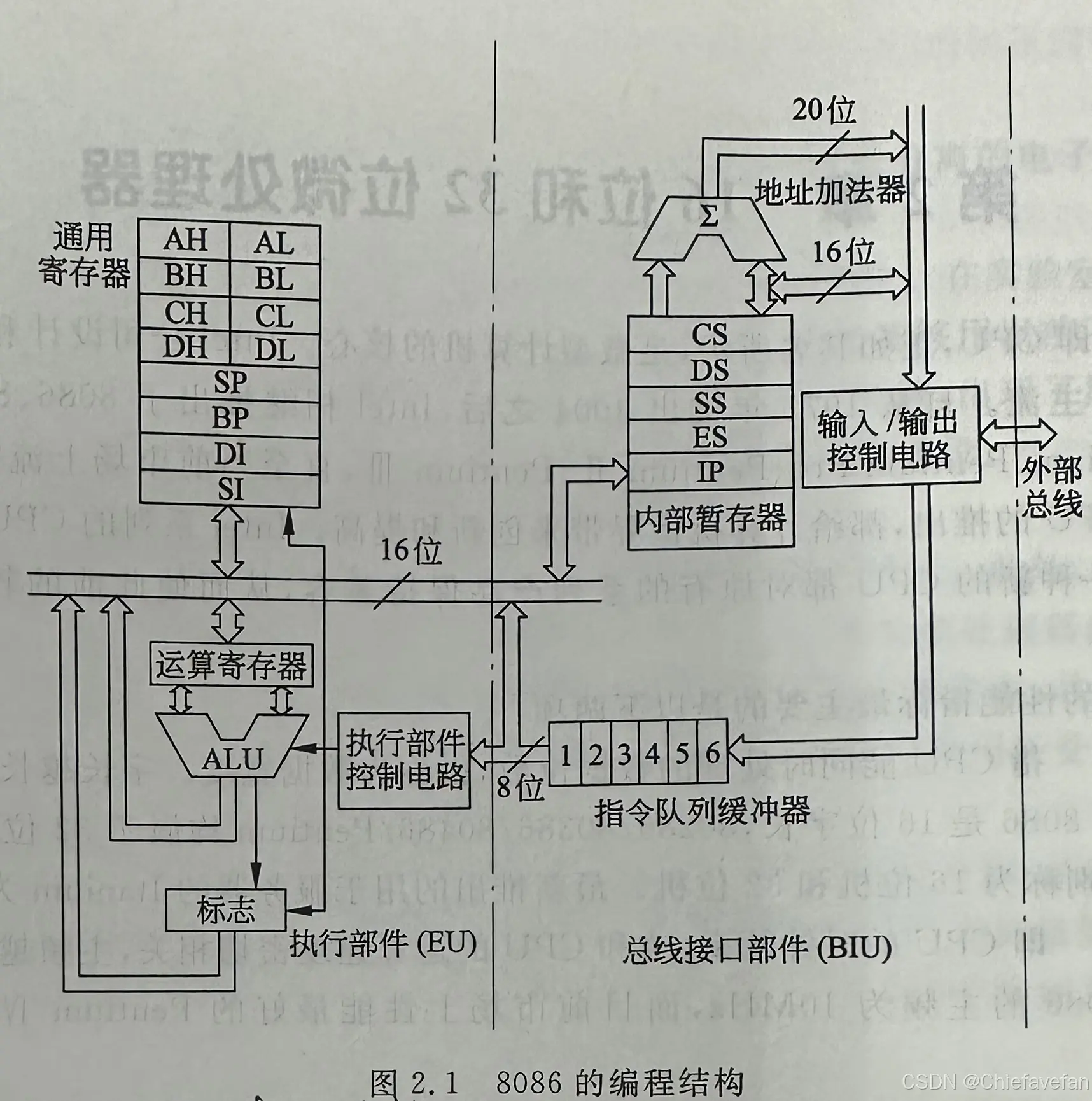
🌟16位微处理器 8086
8086是16位处理器
包含16根数据线和20根地址线,可寻址的范围为 2 20 B 2^{20}B 220B,即 1 M B 1MB 1MB
1、8086的分类
从功能上,8086分为两部分
BIU(Bus Interface Unit, 总线接口部件)和EU(Execution Unit, 执行部件)
总线接口部件BIU
功能:负责与存储器、I/O端口传送数据
组成部分:
- 4个段地址寄存器
- 代码段地址寄存器CS——Code Segment
- 数据段地址寄存器DS——Data
- 附加段地址寄存器ES——Extra
- 堆栈段地址寄存器SS——Stack
- 16位的指令指针寄存器IP(Instruciton Pointer)
- 20位的地址加法器
- 6字节的指令队列缓冲器
执行部件EU
功能:负责指令的执行
组成部分:
-
通用寄存器——AX、BX、CX、DX
-
专用寄存器
- 基地址指针寄存器BP——Base Pointer
- 堆栈指针寄存器SP——Stack Pointer
- 源变址寄存器SI——Source Index
- 目的变址寄存器DI——Destination Index
-
标志寄存器(FR, Flag Register)
共16位,9位使用,7位未使用
- 标志分类
- 状态标志6位
- SF符号标志——Sign Flag
- ZF零标志——Zero Flag
- PF奇偶标志——Parity Flag
- CF进位标志——Carry Flag
- AF辅助进位标志——Auxiliary carry Flag
- OF溢出标志——Overflow Flag
- 控制标志3位
- DF方向标志——Direction Flag
- IF中断允许标志——Interrput enable Flag
- TF跟踪标志——Trace Flag
- 状态标志6位
- 标志分类
-
算术逻辑单元ALU, Arithmetic Logic Unit
2、8086的工作模式
有两种工作方式:最小方式和最大方式
(1 )系统中只有一个CPU,对存储器和 I/O接口的控制信号由CPU 直接产生的单处理机方式称为最小方式,此时 MN/MX接高电平;
(2 ) 对存储器和1/O接口的控制信号由8288总线控制器提供的多处理机方式称为最大方式,此时 MN/MX接低电平,在此方式下可以接入8087或8089
3、补充:
使用DOS功能调用时,子程序的功能号应放在 A H ‾ \underline{AH} AH寄存器中
第3章 Pentium 的指令系统
1、指令的格式
由操作码助记符、操作数组成
2、寻址方式
- 立即寻址方式 (立即数寻址方式 )
- 寄存器寻址方式
- 存储器寻址方式(其中存储器寻址方式可分为)
直接寻址
MOV BX, DS:[1234H] ; 寄存器寻址、直接寻址
MOV BX, [1234H] ; 寄存器寻址、直接寻址
特点:中括号+寄存器
寄存器间接寻址 (间接寻址或间址寻址 )
MOV DX, [BX] ; 寄存器寻址
特点:中括号+寄存器
基址寻址
MOV AL, [BX + 6] ; 寄存器寻址、基址寻址
MOV AL, [BP + 6] ; 寄存器寻址、基址寻址
特点:中括号+BX+数字
中括号+BP+数字
中括号+BP
变址寻址
MOV AL, [SI + 6] ; 寄存器寻址、变址寻址
特点:中括号+SI (DI )
中括号+SI(DI)+数字
基址+变址寻址
MOV AX, [BX + SI + 6] ; 寄存器寻址、基址+变址寻址
特点:中括号+BX+SI(DI)+数字
常用指令
传送指令
通用传送指令 MOV
MOV DX, AL ; 寄存器AL中的移动(复制)到DX中
输入/输出指令 IN/OUT
IN AL, 50H ; 将50H端口的字节读入寄存器AL
OUT 80H, AX ; 将Ax中的内容输出到80H、81H端口
算术运算指令
加法类指令 ADD/INC
不带进位位的加法指令 ADD
ADD CX, 1000H ; CX中内容和1000H相加,结果放在CX中
ADD [BX + DI], AX ; 将BX+DI和BX+DI+1所指两单元内容和AX中的数相加,
; 结果放在BX+DI和BX+DI+1所指的存储单元中
增量指令 INC
INC(Increase)指令只有1个操作数,执行1次操作数加1
一般用于循环程序中修改和循环次数
不会对循环中的算术运算产生的状态产生干扰
INC AL ; 将AL中的内容加1
减法类指令 SUB/DEC/CMP
不考虑借位的减法指令 SUB(Subtract)
SUB SI, 5010H ; SI中的数减去5010H,结果在SI中
SUB [BP + 2], CL ; 将SS段的BP+2所指单元中的值减去CL中的值,
; 结果在BP+2所指的堆栈空间中
减量指令 DEC
DEC(Decline)指令只有1个操作数,执行1次操作数减1
一般用于循环程序中修改和循环次数
不会对循环中的算术运算产生的状态产生干扰
DEC AX ; 将AX的内容减1,再送回AX中
DEC BYTE PTR[DI + 2] ; 将DI+2所指的单元的内容减1,结果送回此单元
比较指令 CMP
CMP(Compare)指令也是执行两个数的相减操作,但不送回相减结果,只是是结果影响标志位
CMP AX, 2000H ; 将AX的内容和2000H相比较,结果影响标志位
CMP EAX, [EBX + EDI + 100] ; 将累加器内容和4个存储单元的数相比
乘法指令 MUL
无符号数的乘法指令 MUL(Multiple)
MUL CX ; AX中和CX中的两个16位数相乘,结果在DX和AX中
MUL WORD PTR [SI] ; AX中的16位数和SI、SI+1所指单元中的16位数相乘
; 结果在DX和AX中
除法指令 DIV
无符号数的除法指令 DIV(Division)
DIV CL ; AX中的数据除以CL中的数据,商在AL中,余数在AH中
DIV WORD PTR
逻辑运算(和移位)指令
逻辑运算指令 AND/OR/XOR/NOT/TEST
分别执行与、或、异或、非(取反)、测试操作
AND\OR\XOR
AND AX, 1000H ; AX中的16位数和1000H相与,结果在AX中
OR AX, 00F0H ; AX和00F0H相或,结果在AX中
XOR AL, 0FH ; AL和0FH相异或,结果在AL中
XOR EAX, EAX ; EAX的内容本身进行异或,结果使EAX清0
XOR ECX, 100 ; ECX寄存器和立即数相异或
XOR ECX, 10000000H ; ECX的内容和1000 0000H异或,结果在ECX中
TEST\NOT
TEST不仅执行AND指令的操作,而且把OF和CF标志清0,修改SF、ZF和PF标志
不送回操作结果,仅仅影响标志位(类似INC、DEC)
TEST AL, 01 ; 如AL的最低位为1,则ZF=0,否则ZF=1
TEST EAX, 80000000H ; 如EAX的最高位为1,则ZF=0,否则ZF=1
NOT AL ; AL中内容求反码,结果在AL中
调用/转移/循环控制/中断指令
子程序调用和返回指令 CALL/RET
CALL 1000H ;
RET 6 ; 带参数的返回指令,n为0~FFFFH中的任一偶数
; 表示从栈顶弹出返回地址后,再使ESP或SP的值加上6
无条件转移指令和条件转移指令 JMP/J * (其中,*表各种条件 )
JMP 1000H ; 段内直接转移,转移地址的偏移量由指令给出
JE/JZ ; 结果为0,则转移
JNE/JNZ ; 结果不为0,则转移
JS ; 符号标志SF为1,则转移
循环控制指令 LOOP
MOV CX, 0100H ; 设置循环次数
KKK: LOOP KKK ; CX减1,如不为0,则循环
... ; 后续处理
中断指令 INT和中断返回指令 IRET/IRETD
第4章 存储器、存储管理和高速缓存技术
计算的存储器按用途和特点可分为两大类:内部存储器和外部存储器
内部存储器,简称内存或主存
外部存储器,简称外存
1、选择存储器考虑的几个方面
易失性
只读性
存储容量
速度
功耗
2、随机存取存储器RAM

SRAM
基于双稳态触发器(6个MOS管)
高速缓存Cache主要由SRAM组成
DRAM
基于栅极电容(1个MOS管)
主存主要由DRAM组成
3、只读存储器ROM
一般分为以下五类
掩模式只读存储器 R O M ( R e a d − O n l y M e m o r y ) ROM(Read-Only\ Memory) ROM(Read−Only Memory)
(一次)可编程只读存储器 P R O M ( P r o g r a m m a b l e R e a d − O n l y M e m o r y ) PROM(Programmable\ Read-Only\ Memory) PROM(Programmable Read−Only Memory)
可擦除可编程只读存储器 E P R O M ( E r a s b l e P r o g r a m m a b l e R e a d − O n l y M e m o r y ) EPROM(Erasble\ Programmable\ Read-Only\ Memory) EPROM(Erasble Programmable Read−Only Memory)
电擦除可编程只读存储器 E E P R O M / E 2 P R O M ( E l e c t r i c a l l y E r a s b l e P r o g r a m m a b l e R e a d − O n l y M e m o r y ) EEPROM/E^{2}PROM(Electrically\ Erasble\ Programmable\ Read-Only\ Memory) EEPROM/E2PROM(Electrically Erasble Programmable Read−Only Memory)
闪烁存储器(闪存) F l a s h M e m o r y Flash\ Memory Flash Memory
4、层次化的存储器体系结构
Cache、内存(内存)和辅存(外存)
5、Cache
现代的Cache通常又被分为L1、L2、L3层
参考《深入理解计算机系统》

第5章 微型计算机和外设的数据传输
1、传输信号分类
指CPU和I/O设备之间
数据信息
状态信息
控制信息
2、接口的功能
寻址功能
输入/输出功能
数据转换功能
联络功能
中断管理功能
复位功能
可编程功能
错误检测功能
3、数据传送方式
指CPU和I/O设备之间
程序方式(又分为)
- 无条件传送方式
- 条件传送方式
中断方式
DMA方式
第6章 串并行通信和接口技术
以下汇编代码均基于MASM风格的语法
考试或自学推荐~
一、基础知识
串行通信
- 按数据传输时发送过程和接收过程的关系
- 全双工方式
- 半双工方式
- 单工方式
- 按时钟对通信过程的定时方式
- 同步通信
- 异步通信
串行通信的传输率
又称波特率,指每秒传输位数
二、编程
可编程串行接口
8250
串行通信芯片 8250 模板
基于MASM风格的语法
/*
<value> 指 要填的数
__ 指相邻要填的 两位
*/
PROC ; Process 进程
MOV DX, 3FBH ; I
MOV AL, 80H ; 照抄
OUT DX, AL
MOV DX, 3F9H ; II
MOV AL, <value> ; 分频系数(除数) 高8位
OUT DX, AL
MOV DX, 3F8H ; III
MOV AL, <value> ; 分频系数 低8位
OUT DX, AL
MOV DX, 3FBH ; IV
MOV AL, <value> ; 查表(通信线控制寄存器)——填 数据帧格式D7~D0位
OUT DX, AL
MOV DX, 3F9H ; V
MOV AL, 000000__B ; 查表(中断允许寄存器)——只需填 D1 D0位
OUT DX, AL
MOV DX, 3FCH ; VI
MOV AL, 000__000B ; 查表(Modem控制寄存器)——只需填 D4 D3位
OUT DX, AL
RET ; return
ENDP ; end_process
注解:
LaTeX中,\div表示除号;\times表示乘号
除数 ( 分频系数 ) = 1843200 ( 波特率 × 16 ) 一般题目会直接给算好的分频系数 除数(分频系数) = \frac{1843200}{(波特率 \times 16)} \\一般题目会直接给算好的分频系数 除数(分频系数)=(波特率×16)1843200一般题目会直接给算好的分频系数
通信线控制寄存器
我们要填 8位数字——查表(附录)比较容易
中断允许寄存器
只需填D1 D0位
查询方式——D1 D0位均置0;中断——相应位置1
Modem控制寄存器
只需填D4 D3位
正常通信D4 0
查询方式D3 0
8251A
异步模式下的初始化程序举例
同步模式下的初始化程序举例
利用状态字进行编程的举例
但凡提到“波特率因子”,就是异步传输
若波特率因子为 16 方式字(模式字)的 D1 D0 位分别为 1 0
波特率因子为 64 方式字(模式字)的 D1 D0 位分别为 1 1
异步模式初始化
波特率因子为16,7个数据位,2个停止位,偶校验
MOV AL, 0FAH
OUT 42H, AL ; 设置模式字为异步模式
MOV AL, 37H ; 设置控制字,使发送启动、接收启动
; 并设置有关信号
OUT 42H, AL
同步模式
2个同步字符,7个数据位,偶校验
MOV AL, 38H
OUT 42H, AL ; 设置模式字为同步模式
MOV AL, 16H
OUT 42H, AL
OUT 42H, AL ; 两个同步字符均为16H
MOV AL, 97H
OUT 42H, AL ; 设置控制字,并启动
利用状态字的编程
波特率因子为16,7个数据位,2个停止位,偶校验
MOV AL, 0FAH
OUT 42H, AL
MOV AL, 35H
OUT 42H, AL
MOV DI, 0000H
MOV CX, 80 ; 这里的AL DI CX都是寄存器
BEGIN: ; 标记一个标签,用于循环的开始。
IN AL, 42H ; 从地址42H的端口读取一个字节到AL
TEST AL, 02H ; 对AL中的值和02H进行位测试操作,检查AL的最低位是否为1
JZ BEGIN ; 如果AL的最低位为0(即TEST的结果为0),则跳转到BEGIN标签继续循环。
IN AL, 40H
MOV DX, OFFSET BUFFER ; 将BUFFER标签的地址(即偏移量)移动到DX寄存器中
MOV [DX + DI], AL ; 将AL中的值移动到以DX+DI的地址处(即BUFFER的某个位置)
INC DI ; 将DI的值加1,准备下一次存储
IN AL, 42H
TEST AL, 078H
JNZ ERROR ; 如果AL的这些位中有任何一位为1(即TEST的结果不为0),则跳转到ERROR标签。
LOOP BEGIN ; 减少CX的值,如果不为0,则跳转到BEGIN标签继续循环。
JMP EXIT ; 如果CX为0,则跳转到EXIT标签
EXIT:
; ... 后续代码
ERROR:
CALL ERR_OUT
; ... 错误处理代码
注解:
- JNZ (Jump if Not Zero )
- 功能:当ZF (零标志 )为0时,执行跳转 这通常表示上一次比较或计算的结果不为零
- 语法:
JNZ label,其中label是跳转的目标标签 - 执行过程:首先检查ZF的状态 如果ZF为0 (即结果不为零 ),则跳转到指定的
label位置执行;如果ZF为1 (即结果为零 ),则继续执行下一条指令 - 应用场景:JNZ指令常用于各种条件判断和循环结构中,特别是当需要基于某个非零条件进行分支处理时
- JZ (Jump if Zero )或 JE (Jump if Equal )
- 功能:当ZF (零标志 )为1时,执行跳转 这通常表示上一次比较或计算的结果为零,或者两个值相等
- 语法:
JZ label或JE label,其中label是跳转的目标标签 注意,JE是JZ的另一种写法,它们的功能完全相同 - 执行过程:首先检查ZF的状态 如果ZF为1 (即结果为零或两个值相等 ),则跳转到指定的
label位置执行;如果ZF为0 (即结果不为零或两个值不相等 ),则继续执行下一条指令 - 应用场景:JZ/JE指令也常用于条件判断和循环结构中,特别是当需要基于某个零条件或相等条件进行分支处理时
8251A 异步模式初始化模板
MOV DX, ___H ; 输出端口地址
MOV AL, 40H
OUT DX, AL
MOV AL, ________B ; 方式字(模式字)
OUT DX, AL
MOV AL, ________B ; 命令字
OUT DX, AL
MOV CX, ___ ; 字节数(字符数)
NEXT: MOV DX, ___H ; DX 地址发生过变化,需要二次传入输出端口地址
IN AL, DX
TEST AL, 01H ; 对 状态位最低位进行 位测试操作 TxRDY?
JZ NEXT
MOV AL, CL
MOV DX, ___H ; 输入端口地址
OUT DX, AL
LOOP NEXT
例题
编写8251异步模式下的接收和发送程序,完成256个字符的发送和接收
设端口地址:208H,209H,波特率因子16,每字符8位,无奇偶校验,1停止位,1起始位
PROC
MOV DX, ___H ; 输出端口地址
MOV AL, 40H
OUT DX, AL
MOV AL, ________B ; 查表——填 方式字(模式字)
OUT DX, AL
MOV AL, ________B ; 查表——填 命令字
OUT DX, AL
MOV CX, ___ ; 字节数(字符数)
NEXT: MOV DX, ___H ; 循环——1次循环输入1个字符
IN AL, DX
TEST AL, O1H ; 对 最低位 进行 位测试操作
JZ NEXT ; 循环结束 跳转回 NEXT标签,即循环的起始位置
MOV AL, CL
MOV DX, ___H ; 输入端口地址
OUT DX, AL
LOOP NEXT ; 减少CX的值,若不为0,则跳转到NEXT标签继续循
RET
ENDP
可编程并行接口
8255A
第7章 中断控制器
主要介绍Interl系列的可编程中断控制器8259A

第8章 DMA控制器
DMA控制器可以像CPU那样得到总线控制权、用DMA方式实现外设和存储器之间的数据高速传输
主要介绍Intel系列的可编程DMA控制器

第9章 计数器/定时器和多功能接口芯片
1、8254 的内部结构
8254 内部集成了3个16位的计数器,每个计数器有6种工作方式,计数初值可设定为二进制码或BCD码,最高工作频率10兆
2、8254 内部寄存器/计数器口地址
| 在 C S ‾ = 0 前提下 A 1 A 0 在\overline{CS}=0前提下 \\ A_1 \quad A_0 在CS=0前提下A1A0 | 选中 |
|---|---|
| 0 \quad 0 | 0#计数器 |
| 0 \quad 1 | 1#计数器 |
| 1 \quad 0 | 2#计数器 |
| 1 \quad 1 | 控制寄存器 |
3、8254 的工作方式(最重要的是方式2、方式3)
其实是8254的应用
方式2对应分频器
方式3对应方波
4、补充
二进制计数比BCD码计数范围更大,因二进制初值为0
🌟5、8254初始化编程
个人建议写汇编语言的时候,长按键盘的键Caps Lock,进行大写锁定会很方便
基于MASM风格的语法
/* C语言的注释语法在编译器MASM中是被支持的 */
/* 以下是可编程定时器/计数器的代码模板 */
/* <some_value> 表示我们要填写的值~ */
/* 这里的PROC, RET, ENDP并非严格的汇编语法, 纸面书写这样更佳清晰*/
PROC ; 卷面上可写为 I8254_Proc / I8254 PROC
MOV DX, <some_value> ; MOV 表传送
MOV AL, <some_value>
OUT DX, AL ; 将 AL中的数输出到 DX内,OUT 表输出
MOV DX, <some_value>
MOV AX, <some_value>
OUT DX, AL ; 先输出低字节
MOV AL, AH ; 将AX的高字节移动到AL
OUT DX, AL ; 再输出高字节
RET
ENDP ; I8254_Proc / I8254 ENDP
例题1
设PC系统机外扩一片8254及相应实验电路
口地址为200H~203H, 设CLK0接8MHz时钟, 从OUT0 输出4KHz 的方波,
编写8254初始化程序, 其中0#定时计数器工作在二进制方式
PROC
MOV DX, ; 控制寄存器地址
MOV AL, ; 查表 填 数据帧格式
OUT DX, AL
MOV DX, ; 选择 计数器地址
MOV AX, ; 计算 向寄存器中填 初值
OUT DX, AL ; 先输出 低字节地址——低8位
MOV AL, AH ; 将AX寄存器中的高字节地址AH复制(移动)到AL中
OUT DX, AL ; 再输出高字节地址——复制到AL寄存器中输出——高8位
RET
ENDP
例题2
设 PC 系统机外扩了一片8254及相应的实验电路
该 8254 的口地址为290H-293H, 己知 1号计数器的输入时钟为 2MHz,要求输出 2KHz的方波
请编写8254 初始化程序段 (采用二进制计数方式 )
PROC ; process
MOV DX, 293H ; 控制寄存器地址——一般都是XX3H
MOV AL, 01110110B ; 查表
OUT DX, AL
MOV DX, 291H ; 选择 计数器地址
MOV AX, 1000 ; 计算——Flck / Fout
OUT DX, AL ; 先输出低字节地址
MOV AL, AH ; 将AX的高字节复制到AL寄存器中
OUT DX, AL ; 再输出高字节——将高字节地址复制到AL寄存器中输出
RET ; return
ENDP ; end_process
注解:
分频器 < = > 方式 2 方波 < = > 方式 3 分频器<=>方式2 \\ 方波 <=>方式3 分频器<=>方式2方波<=>方式3
LaTeX中,\frac{分子}{分母}表示分数
计算公式: F c l k F o u t \frac{F_{clk}}{F_{out}} FoutFclk
⚠️小tips:
如果采用二进制方式——直接填写计算结果(十进制结果)
如果采用BCD码方式——在计算结果后面+H即可
BCD码——每4位二进制数表示1位十进制数
第10章 模/数和数/模转换
模/数(A/D)和数/模(D/A)转换技术主要用于计算机控制和测量仪表中
A-Analog D-Data
模/数转换机ADC(Analog to Digital Converter)
数/模转换及DAC(Digital to Analog Converter)
A/D转换
指模拟信号到数字信号的转换,即把连续变化的模拟量转换为离散数字点集的过程
主要包括抽样和量化两个主要过程
第11~13章 I/O设备
第11章 键盘和鼠标、第12章 显示器的工作原理和接口技术、第13章 打印机的工作原理和接口技术
第11章 键盘和鼠标
一、键盘
1. 基本工作原理
- 键盘通过按键将信息送入计算机
- 键盘内部有定位按键位置的键控制键路
- 根据按键的工作原理,键盘可以分为机械式、塑料薄膜式、电容式等
- 根据接口,键盘可以分为PS/2接口、USB接口等
2. 按键位布局
- 标准键盘按键位布局通常包括104键或107键等
3. 解决抖动和重键问题
- 连锁法和巡回法用于解决按键抖动和重键的问题
二、鼠标
1. 基本工作原理
- 鼠标通过移动和点击来向计算机发送指令
- 鼠标的工作原理有机械式、光机式、光电式等
2. 接口类型
- 鼠标接口类型包括PS/2接口、串行接口、USB接口等
第12章 显示器的工作原理和接口技术
一、显示器工作原理
1. 输入信号接收
- 显示器通过连接线 (如HDMI、VGA等 )接收来自计算机主机或其他设备的输入信号
2. 信号解码和处理
- 显示器内部的数字信号处理器 (DSP )或模拟信号处理器对接收到的信号进行解码和处理
3. 图像处理和渲染
- 图像处理器 (GPU )对解码后的信号进行进一步的处理和渲染,生成最终的图像
4. 显示面板驱动
- 显示器内部的显示面板 (如LCD、OLED )由驱动器控制像素的亮度和颜色
5. 光发射和显示
- 在液晶显示面板中,背光源发出光线,通过液晶层控制显示图像;在OLED中,每个像素直接发光显示图像
二、接口技术
- 显示器常见的接口包括HDMI、VGA、DVI、DisplayPort等
第13章 打印机的工作原理和接口技术
一、打印机工作原理
1. 针式打印机
- 通过打印头的一系列钢针的击出,在打印纸上形成图文
2. 喷墨打印机
- 通过向打印机的相应位置喷射墨点来实现图像和文字的输出
- 喷墨方式包括气泡式和液体压电式
二、接口技术
- 打印机常见的接口包括USB、LPT (并口 )、Ethernet (网络接口 )等
第14章 辅存
原章节名为第14章 软盘、硬盘和光盘子系统
第14章 软盘、硬盘和光盘子系统
一、软盘子系统
- 构成
- 包括软盘驱动器、软盘控制器和驱动程序
- 工作原理
- 驱动器负责读写软盘上的数据,控制器负责转换和传送数据,驱动程序则提供与主机的交互接口
- 技术特点
- 软盘容量有限,读写速度较慢,但因其便携性和可重写性而曾经广泛应用
二、硬盘子系统
- 构成
- 包括硬盘驱动器、硬盘控制器和硬盘驱动程序
- 工作原理
- 硬盘驱动器利用高速旋转的磁盘片和移动的磁头来读写数据,控制器负责控制磁盘的旋转和磁头的移动,驱动程序则负责数据的转换和传输
- 技术特点
- 硬盘容量大,读写速度快,是计算机系统中不可或缺的存储设备
三、光盘子系统
- 构成
- 包括光盘驱动器、光盘控制器和光盘驱动程序
- 工作原理
- 利用激光束在光盘表面的反射来读取数据,控制器负责控制激光束的发射和接收,驱动程序则负责数据的转换和传输
- 技术特点
- 光盘容量大,数据保存时间长,适用于长期存储和传输大量数据
第15章 总线
一、总线概述
- 定义
- 总线是计算机系统中用于连接各个部件并传输信息的公共通道
- 分类
- 按照传输信息种类可分为数据总线、地址总线和控制总线
- 按照连接对象可分为片总线、内总线 (系统总线 )和外总线 (通信总线 )
二、总线工作原理
- 传输方式
- 总线传输采用并行传输和串行传输两种方式,各有其特点和应用场景
- 带宽和性能
- 总线带宽决定了单位时间内可以传输的数据量,是总线性能的重要指标
- 总线规范
- 总线必须遵循一定的规范,包括总线定时协议、物理特性和带宽等
三、总线应用
- 内部连接
- 总线用于连接计算机内部的各个部件,如CPU、内存、输入输出设备等
- 外部连接
- 通过总线与外部设备进行通信和数据交换,如通过USB总线连接外部存储设备或打印机等