一 基本函数
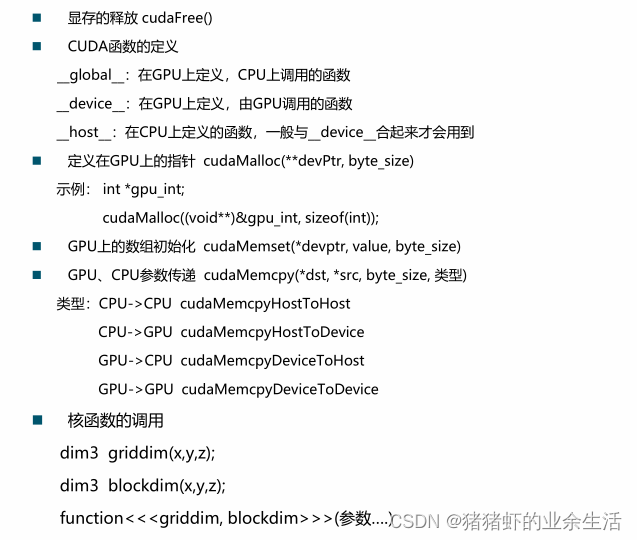
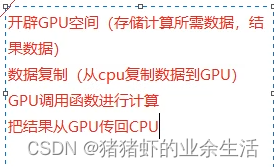
在GPU上开辟空间,无论定义的数据是float还是int ,还是****gpu_int,分配空间的函数都是下面固定的形式 (void**)&

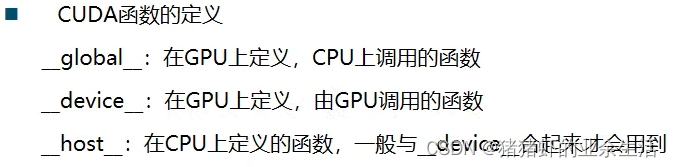
1.函数定义,global void 是配套使用的,是在GPU上定义,也就是GPU上执行,CPU上调用的函数,因为CPU不能识别GPU上运算得到的结果,也就是说在CPU上调用这个函数,是不可能存在return的结果的,所以没有返回值
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
// __是GOU函数的标识符,加了__标识这个函数是在GPU上被调用的
//这个函数在GPU上是无法调用的,所谓在GPU上,就是定义的在GPU上的函数内调用,因为该函数当前是在CPU上
int add_one(int a)
{
return a + 1;
}
//这个函数是被定义在GPU上,由GPU本身调用的函数,所以加了这个__devide__标识之后,就可以在__global__ void show(int *a)函数里面调用该函数
__device__ int add_one(int a)
{
return a + 1;
}
//但是加了__devide__标识之后,由于表示只能在GPU上调用该函数,所以在mian函数里面如果想要实现a[i] = add_one(a[i]);是不可以的
//所以需要再加一个标识符
__host__ __device__ int add_one(int a)
{
return a + 1;
}
__global__ void show(int *a)
{
for (int i = 0; i < 10; i++)
{
a[i] = add_one(a[i]);
printf(" %d ", a[i]);
}
printf("\n");
}
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
// __是GOU函数的标识符,加了__标识这个函数是在GPU上被调用的
//这个函数在GPU上是无法调用的,所谓在GPU上,就是定义的在GPU上的函数内调用,因为该函数当前是在CPU上
//int add_one(int a)
//{
// return a + 1;
//}
//
这个函数是被定义在GPU上,由GPU本身调用的函数,所以加了这个__devide__标识之后,就可以在__global__ void show(int *a)函数里面调用该函数
//__device__ int add_one(int a)
//{
// return a + 1;
//}
//但是加了__devide__标识之后,由于表示只能在GPU上调用该函数,所以在mian函数里面如果想要实现a[i] = add_one(a[i]);是不可以的
//所以需要再加一个标识符
__host__ __device__ int add_one(int a)
{
return a + 1;
}
__global__ void show(int *a)
{
for (int i = 0; i < 10; i++)
{
// a[i] = add_one(a[i]);
printf(" %d ", a[i]);
}
printf("\n");
}
__global__ void int_gpu(int* a)
{
for (int i = 0; i < 10; i++)
{
a[i] = 100;
}
}
int main()
{
int cpu[10] = { 10, 10, 10, 10, 10, 10, 10, 10, 10, 10};
//在GPU上分配空间存储CPU上的数据
int* gpu_int;
cudaMalloc((void**)&gpu_int, 10*sizeof(int)); //将指针指向GPU的一个内存地址,
show << <1, 1 >> > (gpu_int);//一个网格里面只有一个block,也就是只有一个线程
//GPU上数组初始化
cudaMemset(gpu_int, 0, 10 * sizeof(int));
// 将CPU上的数据拷贝到GPU上
cudaMemcpy(gpu_int, cpu, 10*sizeof(int), cudaMemcpyHostToDevice); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
// 在CPU上调用GPU上的函数进行计算,定义在GPU上的函数就是在GPU上进行运算
show << <1, 1 >> > (gpu_int);//一个网格里面只有一个block,也就是只有一个线程
int_gpu << <1, 1 >> > (gpu_int);
show << <1, 1 >> > (gpu_int);
// 将GPU上的数据拷贝到cPU上
cudaMemcpy(cpu, gpu_int, 10*sizeof(int), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
cudaFree(gpu_int);
cudaDeviceSynchronize();
printf(" cpu \n");
for (int i = 0; i < 10; i++)
{
printf(" %d ", cpu[i]);
}
return 0;
}
二 gird, block, thread 之间的关系和理解


)
1 同步的使用时机
2 尽量避免直接从globla memory上频繁读写,可以将数据拷贝到share memory再进行对同一数据频繁的读写操作
local memory,数据读取是很快的
global memeory,从这里读取数据是很慢的
share memory, 是block自己共享的,每个block自己可以读自己内部的数据,一个block内部的线程可以访问自己block的share memory
3
threadIdx是指当前线程在当前线程块里面是排几号,是相对block来说的
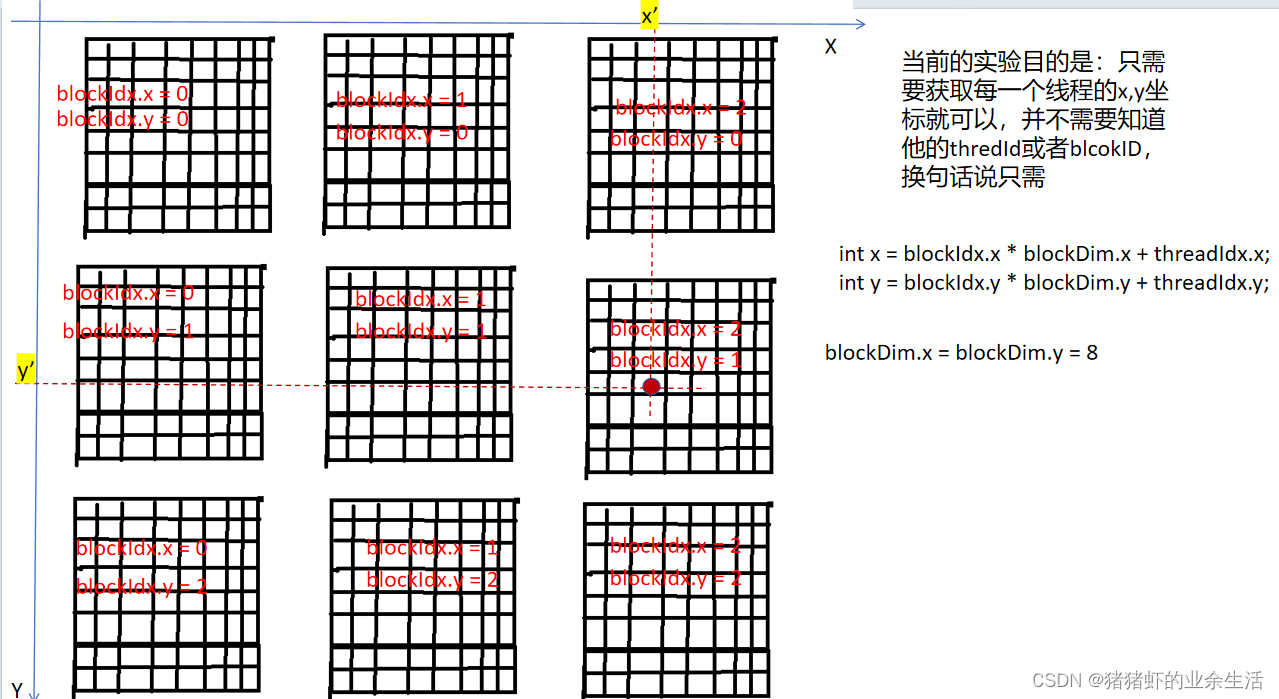
blockIdx是当前线程块在当前grid里面,x这个维度是第几个线程块
blockDim是维度的意思

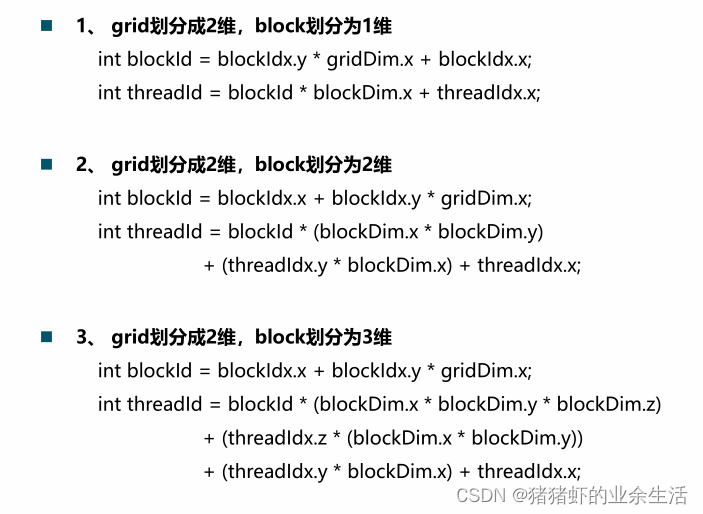
下面这种情况对应的就是grid是2维,block是二维的情况,含有Dim的是对整个grid维度或者blcok维度的定义,也就是有几个


矩阵运算
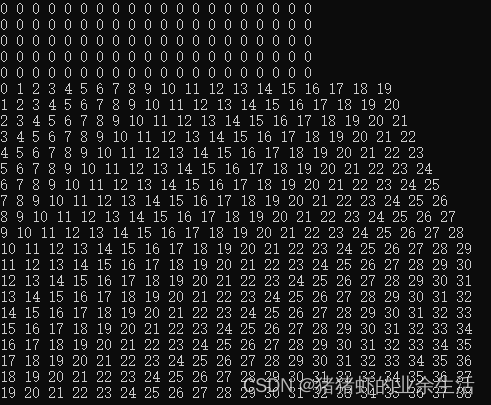
案例1 矩阵维度为20*20,获取矩阵位置坐标,x,y并返回x+y
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include < iostream>
using namespace std;
//20*20的矩阵, 坐标(x,y)位置赋值x+y
__device__ int coord_int(int x, int y)
{
return x + y;
}
__global__ void Matrix_init(int *a, int m, int n)
{
int x = blockIdx.x * blockDim.x + threadIdx.x;
int y = blockIdx.y * blockDim.y + threadIdx.y;
if (x < m && y < n)
{
a[y * n + x] = coord_int(x, y);
}
}
void show(int* a, int m, int n)
{
for (int i = 0; i < n; i++)
{
for ( int j = 0; j < m; j++)
{
cout << a[i * m + j] << " ";
}
cout << endl;
}
}
int main()
{
int* gpu_int;
cudaMalloc((void**)&gpu_int, 400 * sizeof(int));
int cpu_int[400] = { 0 };
show(cpu_int, 20, 20);
dim3 blockdim(8, 8); //线程数要大于400
dim3 griddim(3, 3);
//为什么数组要开辟一个新的空间且要用指针,而数据不用,因为数据编译的时候是可以直接读的,不需要开辟空间
Matrix_init << <griddim, blockdim >> > (gpu_int, 20, 20);
cudaMemcpy(cpu_int, gpu_int, 400 * sizeof(int), cudaMemcpyDeviceToHost);
cudaFree(gpu_int);
show(cpu_int, 20, 20);
return 0;
}
案例2 矩阵乘法和矩阵加法
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <iostream>
using namespace std;
//矩阵20*20
__host__ __device__ int add_one(int a)
{
return a + 1;
}
__global__ void Matrix_add(int* a, int* b, int* c, int m, int n)
{
int x = blockIdx.x * blockDim.x + threadIdx.x;
int y = blockIdx.y * blockDim.y + threadIdx.y;
if (x < m && y < n)
{
c[y * n + x] = a[y * n + x] + b[y * n + x];
}
}
//矩阵乘法:前一个矩阵的行*后一个矩阵的列,然后相加
//只适用与方阵
__global__ void Matrix_multi(int* a, int* b, int* c, int m)
{
int x = blockIdx.x * blockDim.x + threadIdx.x;
int y = blockIdx.y * blockDim.y + threadIdx.y;
int output = 0;
//c[y * m + x] = 0;
if (x < m && y < m)
{
for (int i = 0; i < m; i++)
{
output += a[y * m + i] + b[i * m + x];
//c[y * m + x] += a[y * m + i] + b[i * m + x]; 这里相当于全局内存反复读取c数组,会导致速度慢很多
}
c[y * m + x] = output;
}
}
//cpu上的函数
void show(int* a, int m, int n)
{
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
// a[i] = add_one(a[i]);
cout << a[i * m + j] << " ";
}
cout << endl;
}
}
__global__ void int_gpu(int* a,int m, int n)
{
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
a[i * m + j] = 10;
}
}
}
//__global__ void my_gpu_multi(int* a, int* b, int* c, int m)
//{
// __share__ int
//}
int main()
{
int cpu[400] = { 0 };
show(cpu, 20, 20);
//在GPU上分配空间存储CPU上的数据
int* gpu_int;
cudaMalloc((void**)&gpu_int, 400 * sizeof(int)); //将指针指向GPU的一个内存地址,
int* gpu_add;
cudaMalloc((void**)&gpu_add, 400 * sizeof(int)); //将指针指向GPU的一个内存地址,
int* gpu_multi;
cudaMalloc((void**)&gpu_multi, 400 * sizeof(int)); //将指针指向GPU的一个内存地址,
//GPU上数组初始化
cudaMemset(gpu_int, 0, 400 * sizeof(int));
cudaMemset(gpu_add, 0, 400 * sizeof(int));
cudaMemset(gpu_multi, 0, 400 * sizeof(int));
// 将CPU上的数据拷贝到GPU上
cudaMemcpy(gpu_int, cpu, 400 * sizeof(int), cudaMemcpyHostToDevice); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
cudaMemcpy(gpu_add, cpu, 400 * sizeof(int), cudaMemcpyHostToDevice); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
cudaMemcpy(gpu_multi, cpu, 400 * sizeof(int), cudaMemcpyHostToDevice); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
// 在CPU上调用GPU上的函数进行计算,定义在GPU上的函数就是在GPU上进行运算
dim3 blockdim(8, 8);
dim3 griddim(3, 3);
int_gpu << <griddim, blockdim >> > (gpu_int, 20, 20);
Matrix_add << <griddim, blockdim >> > (gpu_int, gpu_int, gpu_add, 20,20);
Matrix_multi << <griddim, blockdim >> > (gpu_int, gpu_int, gpu_multi, 20);
// 将GPU上的数据拷贝到cPU上
cudaMemcpy(cpu, gpu_int, 400 * sizeof(int), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
show(cpu, 20, 20);//一个网格里面只有一个block,也就是只有一个线程
cudaMemcpy(cpu, gpu_add, 400 * sizeof(int), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
show(cpu, 20, 20);//一个网格里面只有一个block,也就是只有一个线程
cudaMemcpy(cpu, gpu_multi, 400 * sizeof(int), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
show(cpu, 20, 20);//一个网格里面只有一个block,也就是只有一个线程
cudaFree(gpu_int);
cudaFree(gpu_add);
cudaFree(gpu_multi);
cudaDeviceSynchronize();
return 0;
}
案例3 用共享内存实现矩阵乘法
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <iostream>
#include <curand.h>
#include <curand_kernel.h>
using namespace std;
#define ARRAY_SIZE 16
#define ARRAY_LENGTH 256
#define BLOCK_SIZE 16
//GPU上初始化,N是
__global__ void gpu_initial(float *a ,int N) {
int x = threadIdx.x + blockDim.x * blockIdx.x;
curandState state;
long seed = N;
curand_init(seed, x,0,&state);
if (x < N) a[x] = curand_uniform(&state);
}
//在CPU上使用随机数初始化,N是要初始化的数组长度
void cpu_initial(float *a, int N)
{
curandGenerator_t gen;
curandCreateGenerator(&gen, CURAND_RNG_PSEUDO_DEFAULT); //告诉电脑要用什么样的方法生成随机数
curandSetPseudoRandomGeneratorSeed(gen, 11ULL); //指定随机数种子
curandGenerateUniform(gen, a, N); //curandGenerateUniform, 生成均匀分布的0-1的随机数,让a里面的数据从1-N的数据都进行赋值
}
void show(float* a, int m, int n)
{
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
// a[i] = add_one(a[i]);
cout << a[i * m + j] << " ";
}
cout << endl;
}
}
//矩阵乘法:前一个矩阵的行*后一个矩阵的列,然后相加
//只适用与方阵
__global__ void Matrix_multi(float* a, float* b, float* c, int m)
{
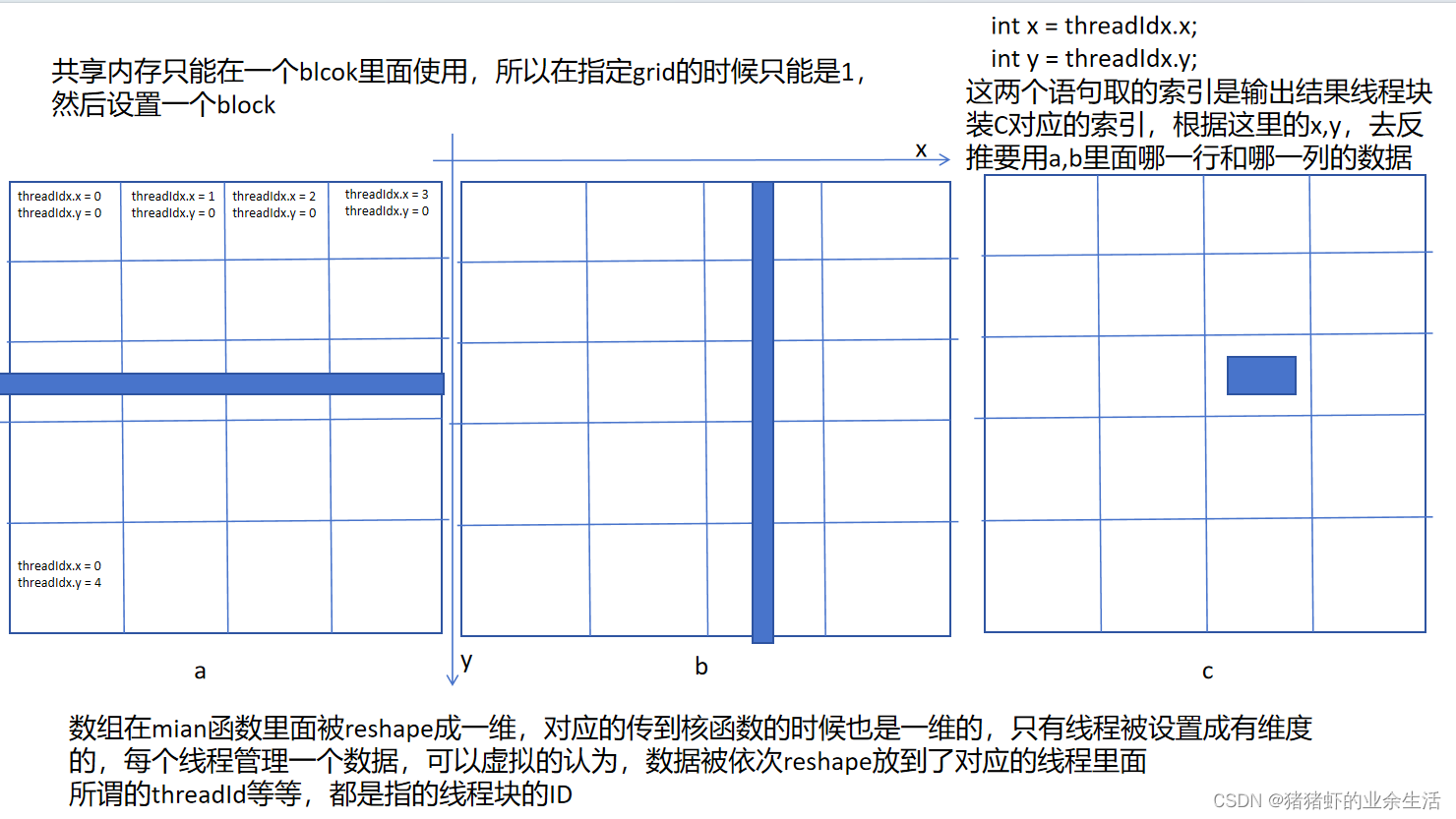
int x = threadIdx.x;
int y = threadIdx.y;
int output = 0;
if (x < m && y < m)
{
for (int i = 0; i < m; i++)
{
output += a[y * m + i] * b[i * m + x];
}
c[y * m + x] = output;
}
}
__global__ void my_gpu_multi(float* a, float* b, float* c, int m)
{
int x = threadIdx.x;
int y = threadIdx.y;
__shared__ float a_share[256];
__shared__ float b_share[256];
if (x < m && y < m)
{
a_share[y * m + x] = a[y * m + x];
b_share[y * m + x] = b[y * m + x];
}
__syncthreads();
float output = 0;
if (x < m && y < m)
{
for (int i = 0; i < m; i++)
{
output += a_share[y*m + i] * b_share[i*m + x];
}
c[y * m + x] = output;
}
}
@fighting
共享内存大小不足:
共享内存的大小由 __shared__ float a_share[256]; 和 __shared__ float b_share[256]; 决定。如果 m 值大于 16,那么共享内存大小可能不足,因为 16x16 = 256。如果 m 大于 16,应该调整共享内存大小。
同步问题:
在 my_gpu_multi 中使用了 __syncthreads() 来确保所有线程都完成了数据拷贝。但如果有些线程的计算还没完成就进入下一步,可能会导致不一致的结果。
线程边界检查:
如果 m 的值较大而 block 尺寸 (m, m) 超出了 GPU 硬件的限制,可能会导致一些线程未能正确启动,导致结果不一致。
int main()
{
int m = 6;
int N = m * m;
float* p_d, * p_da, * p_db, * p_h;
//cpu上开辟空间
p_h = (float*)malloc(N * sizeof(float));
//GPU上开辟空间
cudaMalloc((void**)&p_d, N * sizeof(float)); //将指针指向GPU的一个内存地址,
cudaMalloc((void**)&p_da, N * sizeof(float)); //将指针指向GPU的一个内存地址,
cudaMalloc((void**)&p_db, N * sizeof(float)); //将指针指向GPU的一个内存地址,
//数组初始化,使用两种不同的方式进行初始化
gpu_initial <<<16, 16 >>>(p_da, N); //直接在GPU上初始化
cpu_initial(p_db, N); //在CPU上初始化,但是由于是调用的Gpu上的函数进行的初始化,所以最后还是等价于在GPU上初始化的
cudaMemcpy(p_h, p_da, N * sizeof(float), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
printf("\n p_da");
for (int i = 0; i < N; i++)
{
if (i % m == 0) printf("\n ");
cout << p_h[i] << " ";
}
cudaMemcpy(p_h, p_db, N * sizeof(float), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
printf("\n p_db");
for (int i = 0; i < N; i++)
{
if (i % m == 0) printf("\n ");
cout << p_h[i] << " ";
}
printf("\n ");
//share memory只能在一个block上使用,所以只能定义一个block
dim3 blockdim(m, m);
//Matrix_multi <<<1, blockdim>>> (p_da, p_db, p_d, m);
将GPU上的数据拷贝到cPU上
//cudaMemcpy(p_h, p_d, N * sizeof(float), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
//printf("funtuon Matrix_multi: ------------\n ");
//show(p_h, m, m);//一个网格里面只有一个block,也就是只有一个线程
my_gpu_multi <<<1, blockdim>>> (p_da, p_db, p_d, m);
cudaMemcpy(p_h, p_d, N * sizeof(float), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
printf("funtuon my_gpu_multi: ------------\n ");
show(p_h, m, m);
cudaFree(p_da);
cudaFree(p_db);
cudaFree(p_d);
free(p_h);
return 0;
}
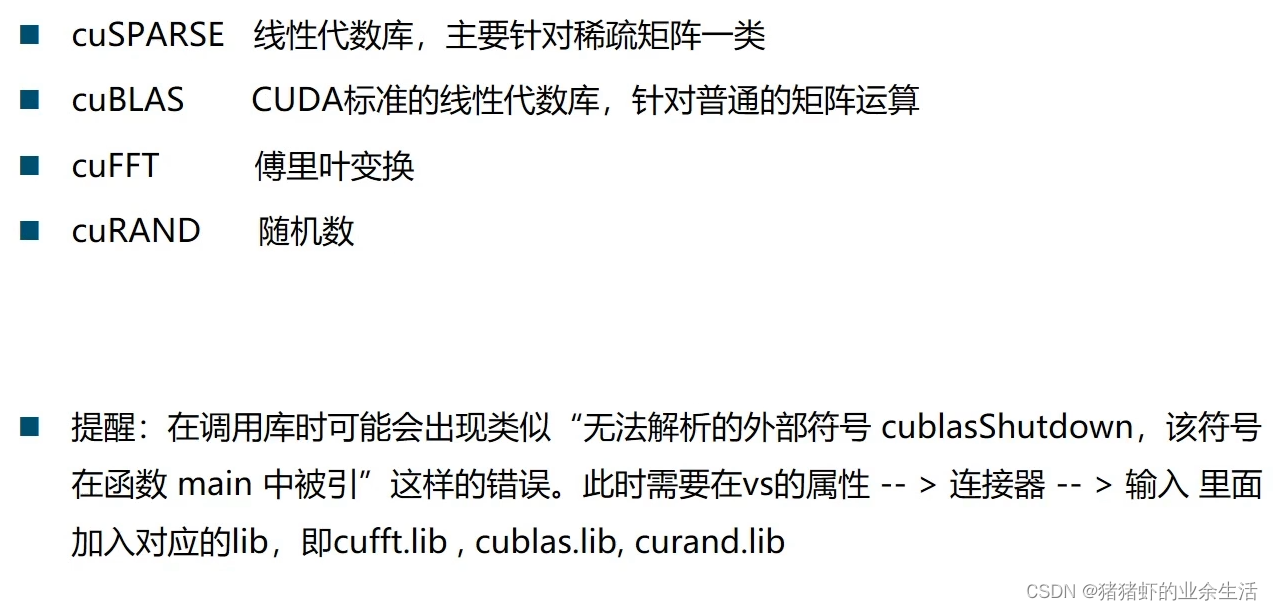
常用官方库的使用
1. cuda案例
cuda函数说明官网

//Example 1. Application Using C and cuBLAS: 1-based indexing
//-----------------------------------------------------------
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <cuda_runtime.h>
#include "cublas_v2.h"
#define M 6
#define N 5
#define IDX2F(i,j,ld) ((((j)-1)*(ld))+((i)-1))
static __inline__ void modify(cublasHandle_t handle, float* m, int ldm, int n, int p, int q, float alpha, float beta) {
cublasSscal(handle, n - q + 1, &alpha, &m[IDX2F(p, q, ldm)], ldm);
cublasSscal(handle, ldm - p + 1, &beta, &m[IDX2F(p, q, ldm)], 1);
}
int main(void) {
// cudaError_t可以判断cuda有没有错误,如果定义的cudaStat不是cudaSucess,就会提示错误信息位置
cudaError_t cudaStat;
cublasStatus_t stat;
cublasHandle_t handle;
int i, j;
float* devPtrA;
float* a = 0;
a = (float*)malloc(M * N * sizeof(*a));
if (!a) {
printf("host memory allocation failed");
return EXIT_FAILURE;
}
for (j = 1; j <= N; j++) {
for (i = 1; i <= M; i++) {
a[IDX2F(i, j, M)] = (float)((i - 1) * N + j);
}
}
cudaStat = cudaMalloc((void**)&devPtrA, M * N * sizeof(*a));
if (cudaStat != cudaSuccess) {
printf("device memory allocation failed");
free(a);
return EXIT_FAILURE;
}
stat = cublasCreate(&handle);
if (stat != CUBLAS_STATUS_SUCCESS) {
printf("CUBLAS initialization failed\n");
free(a);
cudaFree(devPtrA);
return EXIT_FAILURE;
}
stat = cublasSetMatrix(M, N, sizeof(*a), a, M, devPtrA, M);
if (stat != CUBLAS_STATUS_SUCCESS) {
printf("data download failed");
free(a);
cudaFree(devPtrA);
cublasDestroy(handle);
return EXIT_FAILURE;
}
modify(handle, devPtrA, M, N, 2, 3, 16.0f, 12.0f);
stat = cublasGetMatrix(M, N, sizeof(*a), devPtrA, M, a, M);
if (stat != CUBLAS_STATUS_SUCCESS) {
printf("data upload failed");
free(a);
cudaFree(devPtrA);
cublasDestroy(handle);
return EXIT_FAILURE;
}
cudaFree(devPtrA);
cublasDestroy(handle);
for (j = 1; j <= N; j++) {
for (i = 1; i <= M; i++) {
printf("%7.0f", a[IDX2F(i, j, M)]);
}
printf("\n");
}
free(a);
return EXIT_SUCCESS;
}
2.cuda自带函数:实现矩阵乘法运算 cublasSgemm

lad是A的行数,ldb是B的行数

//Example 1. Application Using C and cuBLAS: 1-based indexing
//-----------------------------------------------------------
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <cuda_runtime.h>
#include "cublas_v2.h"
#include <ctime>
#include <iostream>
using namespace std;
int main()
{
srand(time(0));
// C = A*B
int M = 2; //矩阵A的行,矩阵C的行
int N = 3; //矩阵A的列,矩阵B的行
int K = 4; //矩阵B的列,矩阵C的列
float* h_A = (float*)malloc(sizeof(float) * M * N);
float* h_B = (float*)malloc(sizeof(float) * N * K);
float* h_C = (float*)malloc(sizeof(float) * M * K);
//******************************* 矩阵初始化
cout << " A ----------- " << endl;
for (int i = 0; i < M * N; i++)
{
h_A[i] = rand() % 10;
cout << h_A[i] << " ";
if ((i + 1) % N == 0)
cout << endl;
}
cout << endl;
cout << " B ----------- " << endl;
for (int i = 0; i < N * K; i++)
{
h_B[i] = rand() % 10;
cout << h_B[i] << " ";
if ((i + 1) % K == 0)
cout << endl;
}
cout << endl;
//******************************* 在GPU上开辟空间存储数据
float *d_A, *d_B, *d_C;
cudaMalloc( (void**)&d_A, sizeof(float) * M * N);
cudaMalloc((void**)&d_B, sizeof(float) * N * K);
cudaMalloc((void**)&d_C, sizeof(float) * M * K);
//******************************* 将数据从CPU拷贝到GPU
cudaMemcpy(d_A, h_A, sizeof(float) * M * N, cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, sizeof(float) * N * K, cudaMemcpyHostToDevice);
float alpha = 1;
float beta = 0;
cublasHandle_t handle;
cublasCreate(&handle);
cublasSgemm(handle,
CUBLAS_OP_N, //数据不转置
CUBLAS_OP_N,
K, //矩阵B的列
M, //矩阵A的行
N, //矩阵A的列
&alpha,
d_B,
K,
d_A,
N,
&beta,
d_C,
K);
cudaMemcpy(h_C, d_C, sizeof(float) * M * K, cudaMemcpyDeviceToHost);
cout << " c ----------- " << endl;
for (int i = 0; i < M * K; i++)
{
cout << h_C[i] << " ";
if ((i + 1) % K == 0)
cout << endl;
}
cout << endl;
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
return 0;
}
3.cuda自带函数:实现矩阵每个数的翻倍, cublasSccal
把间隔设置为1,就可以实现把当前矩阵每一个元素都乘以这么一个常量

//Example 1. Application Using C and cuBLAS: 1-based indexing
//-----------------------------------------------------------
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <cuda_runtime.h>
#include "cublas_v2.h"
#include <ctime>
#include <iostream>
using namespace std;
int main()
{
srand(time(0));
// C = A*B
int M = 2; //矩阵A的行,矩阵C的行
int N = 3; //矩阵A的列,矩阵B的行
float* h_A = (float*)malloc(sizeof(float) * M * N);
//******************************* 矩阵初始化
cout << " A ----------- " << endl;
for (int i = 0; i < M * N; i++)
{
h_A[i] = rand() % 10;
cout << h_A[i] << " ";
if ((i + 1) % N == 0)
cout << endl;
}
cout << endl;
//******************************* 在GPU上开辟空间存储数据
float *d_A, *d_B, *d_C;
cudaMalloc( (void**)&d_A, sizeof(float) * M * N);
//******************************* 将数据从CPU拷贝到GPU
cudaMemcpy(d_A, h_A, sizeof(float) * M * N, cudaMemcpyHostToDevice);
float alpha = 2.2;
cublasHandle_t handle;
cublasStatus_t stat;
//函数用于初始化CUBLAS库并创建一个CUBLAS上下文。上下文被表示为一个cublasHandle_t类型的句柄。
//handle是一个指向cublasHandle_t类型的指针,cublasCreate函数会将创建的句柄存储在这个位置。
//如果初始化成功,stat将返回CUBLAS_STATUS_SUCCESS,否则会返回一个错误码。
stat = cublasCreate(&handle);
if (stat != CUBLAS_STATUS_SUCCESS) {
printf("CUBLAS initialization failed\n");
return EXIT_FAILURE;
}
stat = cublasSscal(handle,6, &alpha, d_A,1);
if (stat != CUBLAS_STATUS_SUCCESS) {
printf("CUBLAS scaling failed\n");
return EXIT_FAILURE;
}
cudaMemcpy(h_A, d_A, sizeof(float) * M * N, cudaMemcpyDeviceToHost);
cout << " c ----------- " << endl;
for (int i = 0; i < M * N; i++)
{
cout << h_A[i] << " ";
if ((i + 1) % N == 0)
cout << endl;
}
cout << endl;
cudaFree(d_A);
return 0;
}
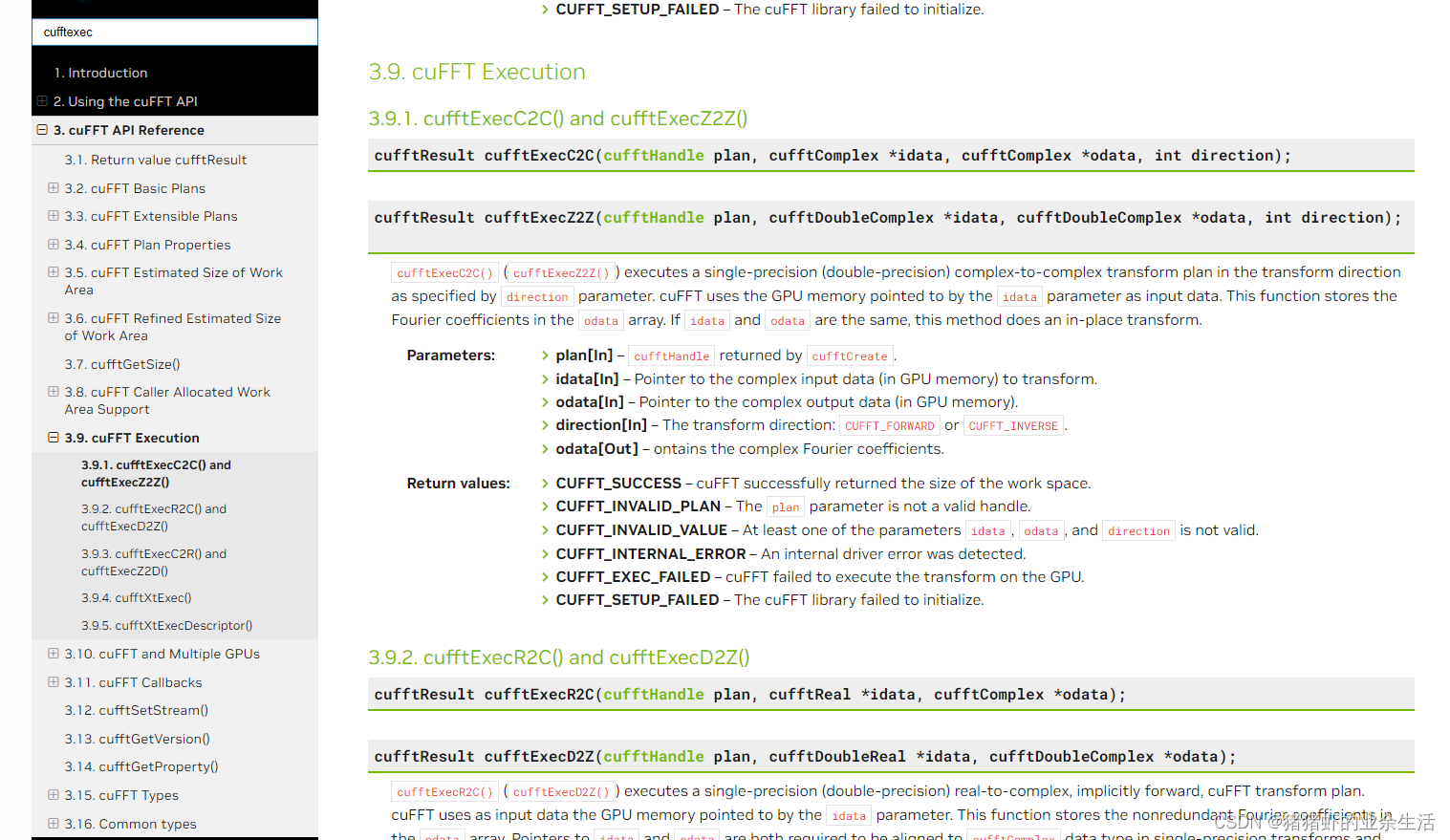
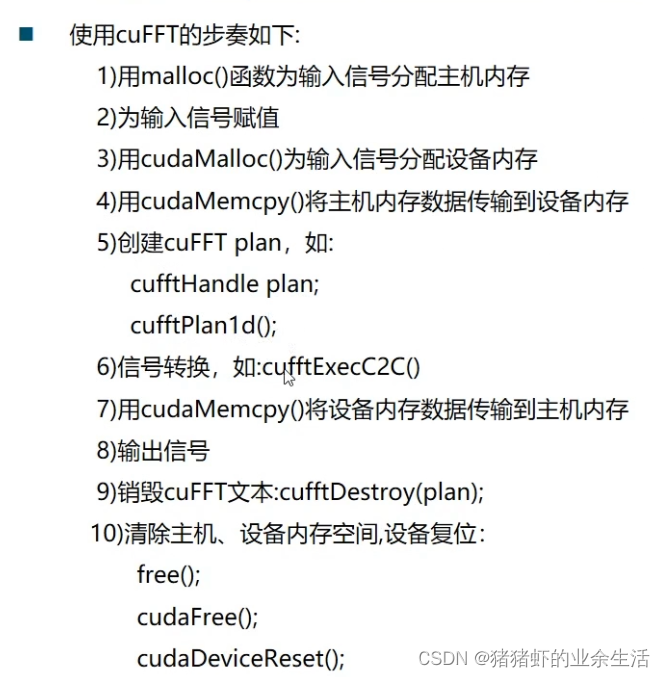
4. 傅里叶变换 https://docs.nvidia.com/cuda/cufft/index.html
cufftExecC2C() and cufftExecZ2Z()是一样的,前者是浮点型,后者是double,后者精度更高
//Example 1. Application Using C and cuBLAS: 1-based indexing
//-----------------------------------------------------------
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <cuda_runtime.h>
#include "cublas_v2.h"
#include <ctime>
#include <iostream>
#include <cufft.h>
using namespace std;
int main()
{
const int Nt = 256;
const int BACTH = 1;
//BACTH 用户霹雳那个处理一批一维的数据,假设数据是512,当BATCH =2,则将0-255,256-512作为两个一维信号做FFT变换
//定义cufftDoubleComplex类型的指针,device_in记录输入值,device_out计记录计算结果
cufftDoubleComplex *host_in, * host_out, * device_in, * device_out;
//这种方式开辟空空间再向GPU传输数据是要快于传统的malloc方式的,两者是等价的
/* float* host_in = (float*)malloc(sizeof(float) * Nt);
float* host_out = (float*)malloc(sizeof(float) * Nt);
*/
cudaMallocHost((void**)&host_in, sizeof(cufftDoubleComplex) * Nt);
cudaMallocHost((void**)&host_out, sizeof(cufftDoubleComplex) * Nt);
for (int i = 0; i < Nt; i++)
{
host_in[i].x = i + 1;
host_in[i].y = i + 1;
}
// ************* 在GPU上开辟空间
cudaMalloc((void**)&device_in, sizeof(cufftDoubleComplex) * Nt);
cudaMalloc((void**)&device_out, sizeof(cufftDoubleComplex) * Nt);
//从CPU上数据拷贝数据到GPU上
cudaMemcpy(device_in, host_in, Nt* sizeof(cufftDoubleComplex), cudaMemcpyHostToDevice);
//创建cufft句柄
cufftHandle cufftForwrdHandle;
cufftPlan1d(&cufftForwrdHandle, Nt, CUFFT_Z2Z, BACTH); //传参
//CUFFT_Z2Z因为前面定义的数据类型是Double-Complex,所以这里指定的数据类型是这个
// typedef enum cufftType_t {
// CUFFT_R2C = 0x2a, // Real to Complex (interleaved)
// CUFFT_C2R = 0x2c, // Complex (interleaved) to Real
// CUFFT_C2C = 0x29, // Complex to Complex, interleaved
// CUFFT_D2Z = 0x6a, // Double to Double-Complex
// CUFFT_Z2D = 0x6c, // Double-Complex to Double
// CUFFT_Z2Z = 0x69 // Double-Complex to Double-Complex
//} cufftType;
//执行fft正变换
cufftExecZ2Z(cufftForwrdHandle, device_in, device_out, CUFFT_FORWARD); //正变换是CUFFT_FORWARD,反变换是CUFFT_INVERSE
// 从GPU 上数据拷贝数据到CPU上
cudaMemcpy(host_out, device_out, Nt * sizeof(cufftDoubleComplex), cudaMemcpyDeviceToHost);
//设置输出精度--输出正变换的结果
cout << " 正变换的结果: " << endl;
for (int i = 0; i < Nt; i++)
{
cout << host_out[i].x << " + j*" << host_out[i].y << endl;
}
cudaFree(device_in);
cudaFree(device_out);
return 0;
}
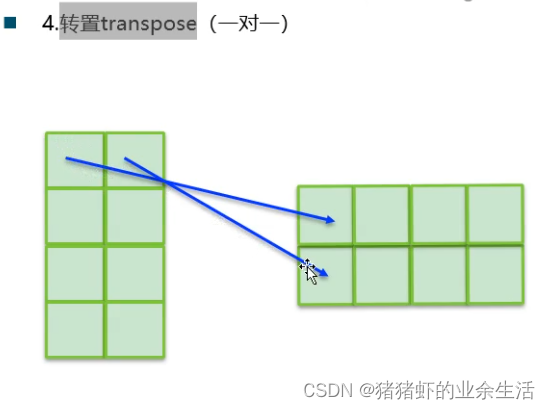
三 常见的可以采用并行的模式
1, 一对一 ,例如输入x,函数输出y = x*x



#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <iostream>
#include <curand.h>
#include <curand_kernel.h>
using namespace std;
#define ARRAY_SIZE 16
#define ARRAY_LENGTH 256
#define BLOCK_SIZE 16
//GPU上初始化,N是
__global__ void gpu_initial(float *a ,int N) {
int x = threadIdx.x + blockDim.x * blockIdx.x;
curandState state;
long seed = N;
curand_init(seed, x,0,&state);
if (x < N) a[x] = curand_uniform(&state);
}
__global__ void square(float *d_out,int N)
{
int myID = threadIdx.x + blockDim.x * blockIdx.x;
if (myID < N)
{
float data = d_out[myID];
d_out[myID] = data * data;
}
}
int main()
{
int m = 6;
int N = m * m;
float* d_out, *h_in, *h_out;
//cpu上开辟空间
h_in = (float*)malloc(N * sizeof(float));
h_out = (float*)malloc(N * sizeof(float));
//GPU上开辟空间
cudaMalloc((void**)&d_out, N * sizeof(float)); //将指针指向GPU的一个内存地址,
//数组初始化,使用两种不同的方式进行初始化
//直接在GPU上初始化, 4 是 numBlocks,表示启动了 4 个块(block),16 是 numThreadsPerBlock,表示每个块中有 16 个线程(thread)
//这种初始化方式适用于一维数组
gpu_initial <<<4, 16 >>>(d_out, N);
cudaMemcpy(h_in, d_out, N * sizeof(float), cudaMemcpyDeviceToHost);
printf("\n h_in");
for (int i = 0; i < N; i++)
{
if (i % m == 0) printf("\n ");
cout << h_in[i] << " ";
}
square << <4, 16 >> > (d_out, N);
//将数据从GPU拷贝到CPU,同时指定拷贝的长度
cudaMemcpy(h_out, d_out, N * sizeof(float), cudaMemcpyDeviceToHost);
printf("\n h_out");
for (int i = 0; i < N; i++)
{
if (i % m == 0) printf("\n ");
cout << h_out[i] << " ";
}
cudaFree(d_out);
free(h_in);
free(h_out);
return 0;
}
2. 卷积操作

- 我写的
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <iostream>
#include <curand.h>
#include <curand_kernel.h>
using namespace std;
#define ARRAY_SIZE 16
#define ARRAY_LENGTH 256
#define BLOCK_SIZE 16
//GPU上初始化,N是
__global__ void gpu_initial(float* a, int N) {
int x = threadIdx.x + blockDim.x * blockIdx.x;
curandState state;
long seed = N;
curand_init(seed, x, 0, &state);
if (x < N) a[x] = curand_uniform(&state);
}
void show(float* a, int m, int n)
{
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
// a[i] = add_one(a[i]);
cout << a[i * m + j] << " ";
}
cout << endl;
}
}
//设置n*n大小的block,把对应坐标的矩阵数据读取到共享内存里,然后其中的(n-2)*(n-2)个线程进行卷积运算
__global__ void Conv_method1(float* p_d, float*kernel, int block_size, int kernel_Len)
{
int x = threadIdx.x; //现在是一个一维的一个block
int y = threadIdx.y;
extern __shared__ float s_pd[];
if (x < block_size && y < block_size)
{
s_pd[y * block_size + x] = p_d[y * block_size + x];
//printf("s_pd[y * block_size + x] = %f \n" , s_pd[y * block_size + x]);
}
__syncthreads();
//for (int i = 0; i < kernel_Len; i++) {
// printf("kernel[%d] = %f", i, kernel[i]);
//}
float out = 0;
if (x > 0 && y >0 && x < block_size-1 && y < block_size-1)
{
out = s_pd[(y-1)* block_size + x - 1] * kernel[0] + s_pd[(y - 1) * block_size + x] * kernel[1] + s_pd[(y - 1) * block_size + x+1] * kernel[2] +
s_pd[y * block_size + x - 1] * kernel[3] + s_pd[y * block_size + x] * kernel[4] + s_pd[y * block_size + x + 1] * kernel[5] +
s_pd[(y+1)* block_size + x - 1] * kernel[6] + s_pd[(y + 1) * block_size + x] * kernel[7] + s_pd[(y + 1) * block_size + x + 1] * kernel[8];
//printf(" x = %d,y = %d,out = %f \n",x,y,out);
}
p_d[y * block_size + x] = out;
__syncthreads();
}
int main()
{
int m = 6;
int N = m*m;
int kernelLen = 9;
float* p_d, * h_in, * h_out;
float *h_kenel, * d_kernel;
//cpu上开辟空间
h_in = (float*)malloc(N * sizeof(float));
h_out = (float*)malloc(N * sizeof(float));
h_kenel = (float*)malloc(9 * sizeof(float));
//GPU上开辟空间
cudaMalloc((void**)&p_d, N * sizeof(float)); //将指针指向GPU的一个内存地址
cudaMalloc((void**)&d_kernel, 9 * sizeof(float)); //将指针指向GPU的一个内存地址
使用循环赋值
printf("h_kenel \n ");
float values[] = { 1, 1, 1, 1, -8, 1, 1,1,1};
for (int i = 0; i < kernelLen; i++) {
h_kenel[i] = values[i];
cout << h_kenel[i] << " ";
}
printf(" \n ");
cudaMemcpy(d_kernel, h_kenel, kernelLen * sizeof(float), cudaMemcpyHostToDevice);
gpu_initial << <16, 16 >> > (p_d, N); //直接在GPU上初始化
cudaMemcpy(h_in, p_d, N * sizeof(float), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
printf("h_in \n ");
show(h_in, m, m);
dim3 griddim(1, 1);
dim3 blockdim(m, m);
Conv_method1 << <griddim, blockdim, sizeof(float)* N >> > (p_d, d_kernel, m, kernelLen);
//将数据从GPU拷贝到CPU,同时指定拷贝的长度
cudaMemcpy(h_out, p_d, N * sizeof(float), cudaMemcpyDeviceToHost);
printf("\n h_out \n ");
show(h_out,m,m);
cudaFree(p_d);
free(h_in);
free(h_out);
return 0;
}
- 别人写的
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <iostream>
#include <fstream>
#include <iomanip>
#include <time.h>
using namespace std;
// 调用CUDA函数并检查是否出现错误
#define CUDA_CALL(x) {\
const cudaError_t a = (x);\
if (a != cudaSuccess) { \
fprintf(stderr, "\nCUDA Error: %s (err_num=%d)\nfile %s, line %d\n", cudaGetErrorString(a), a, __FILE__, __LINE__);\
cudaDeviceReset(); exit(1);\
} \
}
// 调用核函数并检查是否出现错误
__host__ void cuda_error_check(const char* kernelName) {
if (cudaPeekAtLastError() != cudaSuccess) {
printf("\n%s %s\n", kernelName, cudaGetErrorString(cudaGetLastError()));
cudaDeviceReset();
exit(1);
}
}
// 设置参数
const int TILE_W = 32; // block的x维大小
const int TILE_H = 32; // block的y维大小
const int DATA_W = 320; // 输入矩阵的x维大小
const int DATA_H = 640; // 输入矩阵的y维大小
const int KERNEL_RADIUS = 1; // 卷积核的半径
// 卷积核写入GPU常量内存中
__constant__ int KERNEL[2 * KERNEL_RADIUS + 1][2 * KERNEL_RADIUS + 1] =
{ 1, 1, 1,
1, -8, 1,
1, 1, 1 };
// 通过共享内存,进行卷积运算
__global__ void convolution(float* dst, float* src) {
// 线程在所在block中的x,y坐标
int tidx = threadIdx.x;
int tidy = threadIdx.y;
// 线程应该读取到shared memory中对应的矩阵元素坐标
int readx = (blockDim.x - 2 * KERNEL_RADIUS) * blockIdx.x + (threadIdx.x - KERNEL_RADIUS);
int ready = (blockDim.y - 2 * KERNEL_RADIUS) * blockIdx.y + (threadIdx.y - KERNEL_RADIUS);
// 除去不需要加载内存的地方
if (readx >= DATA_W + KERNEL_RADIUS || ready >= DATA_H + KERNEL_RADIUS)
return;
// 声明block的共享内存
__shared__ float src_s[TILE_H][TILE_W];
// 把当前block需要处理的区域读取到shared memory,输入矩阵周围的记为0
if (readx >= 0 && readx < DATA_W && ready >= 0 && ready < DATA_H) {
src_s[tidy][tidx] = src[ready * DATA_W + readx];
}
else {
src_s[tidy][tidx] = 0;
}
// 同步block中所有线程,保证共享内存完全读入矩阵
__syncthreads();
// 卷积计算
float output = 0;
int kernel_w = 2 * KERNEL_RADIUS + 1;
if (tidx < blockDim.x - 2 * KERNEL_RADIUS && readx < DATA_W - KERNEL_RADIUS &&
tidy < blockDim.y - 2 * KERNEL_RADIUS && ready < DATA_H - KERNEL_RADIUS) {
for (int i = 0; i < kernel_w; i++) {
for (int j = 0; j < kernel_w; j++) {
output += src_s[tidy + j][tidx + i] * KERNEL[j][i];
}
}
// 写入dst对应坐标
dst[(ready + KERNEL_RADIUS) * DATA_W + (readx + KERNEL_RADIUS)] = output;
}
}
int main() {
const int INPUTSIZE = DATA_H * DATA_W;
printf("---------- initilizing ----------\n");
clock_t tt = clock();
// CPU输入输出矩阵的声明
float* h_src = (float*)malloc(INPUTSIZE * sizeof(float));
float* h_dst = (float*)malloc(INPUTSIZE * sizeof(float));
// 输入矩阵中元素全部设为1
for (int i = 0; i < DATA_W; i++) {
for (int j = 0; j < DATA_H; j++) {
h_src[i + j * DATA_W] = (float)1;
}
}
// 将输入矩阵输出
ofstream ofs("input_output.txt");
for (int j = 0; j < DATA_H; j++) {
for (int i = 0; i < DATA_W; i++) {
ofs << setw(5) << h_src[i + j * DATA_W];
}
ofs << '\n';
}
ofs << '\n';
// 设定使用第一个GPU
CUDA_CALL(cudaSetDevice(0));
// GPU输入输出矩阵的声明
float* d_src = 0;
float* d_dst = 0;
// 初始化
CUDA_CALL(cudaMalloc(&d_src, INPUTSIZE * sizeof(float)));
CUDA_CALL(cudaMalloc(&d_dst, INPUTSIZE * sizeof(float)));
CUDA_CALL(cudaMemcpy(d_src, h_src, INPUTSIZE * sizeof(float), cudaMemcpyHostToDevice));
CUDA_CALL(cudaMemcpy(d_dst, h_dst, INPUTSIZE * sizeof(float), cudaMemcpyHostToDevice));
// 输出内存初始化所需时间
printf("Initializaion time(ms) : %f\n", ((float)clock() - tt) / CLOCKS_PER_SEC);
printf("---------- calculating ----------\n");
// 设定核函数中grid和block的参数
//dim3 gridDim = (11, 22);
/*gridDim定义了网格的维度。在这个例子中,网格有两个维度:
x 维度有 11 个块
y 维度有 22 个块*/
dim3 gridDim = { (DATA_W + (TILE_W - 2 * KERNEL_RADIUS - 1)) / (TILE_W - 2 * KERNEL_RADIUS),
(DATA_H + (TILE_H - 2 * KERNEL_RADIUS - 1)) / (TILE_H - 2 * KERNEL_RADIUS) };
printf("---------- calculating ----(DATA_W + (TILE_W - 2 * KERNEL_RADIUS - 1)) / (TILE_W - 2 * KERNEL_RADIUS) = %d, (DATA_H + (TILE_H - 2 * KERNEL_RADIUS - 1)) / (TILE_H - 2 * KERNEL_RADIUS) = %d--\n",
(DATA_W + (TILE_W - 2 * KERNEL_RADIUS - 1)) / (TILE_W - 2 * KERNEL_RADIUS),
(DATA_H + (TILE_H - 2 * KERNEL_RADIUS - 1)) / (TILE_H - 2 * KERNEL_RADIUS));
dim3 blockDim = { TILE_W, TILE_H };
// 调用核函数并计时
cudaEvent_t start, stop;
cudaEventCreate(&start);
cudaEventCreate(&stop);
cudaEventRecord(start, 0);
convolution << <gridDim, blockDim >> > (d_dst, d_src);
// 检查核函数调用是否出现错误
cuda_error_check("convolution_shared_memory");
// CPU等待GPU完成核函数的计算
CUDA_CALL(cudaDeviceSynchronize());
// 输出核函数调用时长
cudaEventRecord(stop, 0);
cudaEventSynchronize(stop);
float elapsedTime;
cudaEventElapsedTime(&elapsedTime, start, stop);
printf("Kernel time(ms) : %f\n", elapsedTime);
cudaEventDestroy(start);
cudaEventDestroy(stop);
// CPU获取GPU核函数计算结果
CUDA_CALL(cudaMemcpy(h_dst, d_dst, INPUTSIZE * sizeof(float), cudaMemcpyDeviceToHost));
// 输出卷积后的结构
for (int j = 0; j < DATA_H; j++) {
for (int i = 0; i < DATA_W; i++) {
ofs << setw(5) << h_dst[i + j * DATA_W];
}
ofs << '\n';
}
ofs.close();
// 释放GPU内存
cudaFree(d_src);
cudaFree(d_dst);
//cudaFree(KERNEL);
// 释放CPU内存
free(h_src);
free(h_dst);
// 清空重置GPU
CUDA_CALL(cudaDeviceReset());
printf("Total calculation time(ms) : %f\n", ((float)clock() - tt) / CLOCKS_PER_SEC);
}
3.
4.
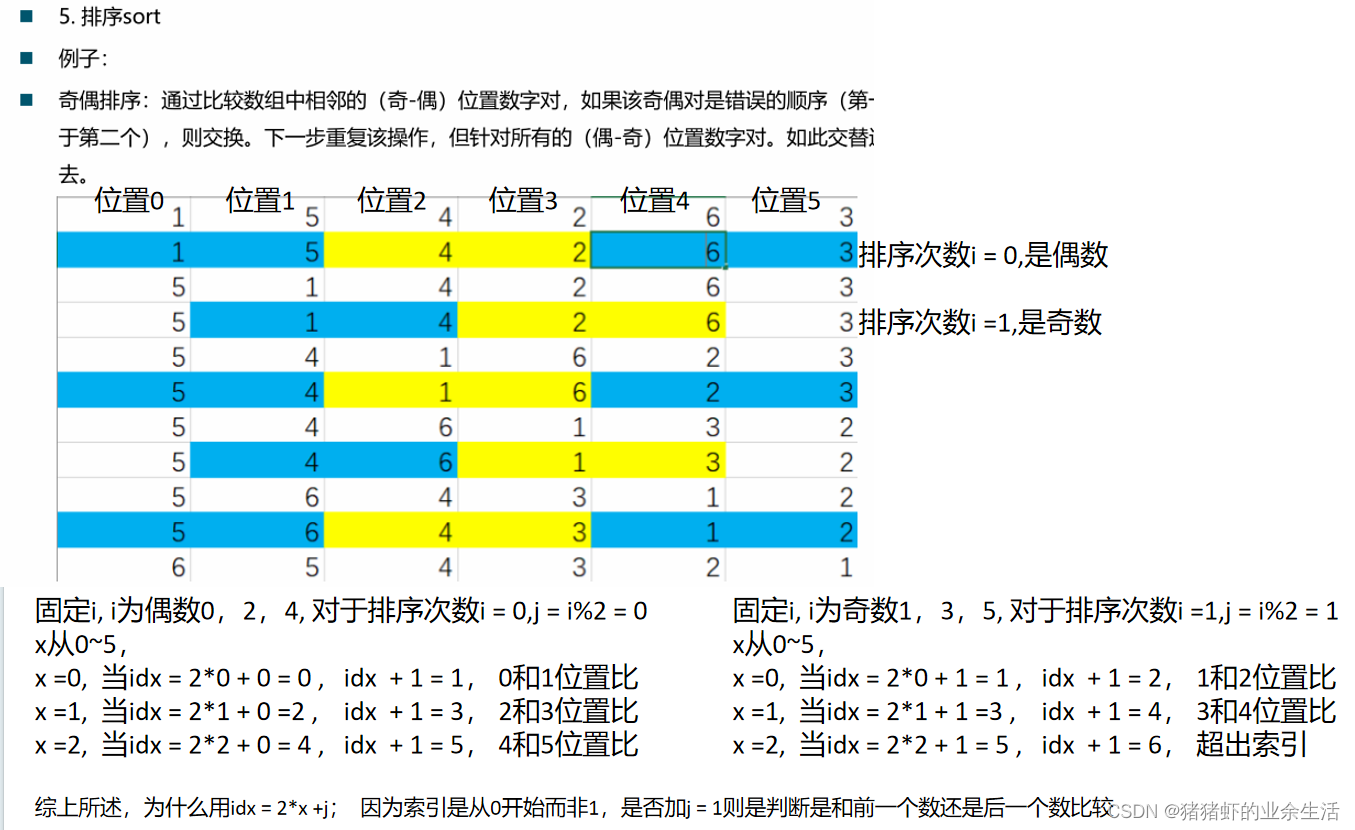
5
动态共享内存的初始化和使用
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <iostream>
#include <curand.h>
#include <curand_kernel.h>
using namespace std;
#define ARRAY_SIZE 16
#define ARRAY_LENGTH 256
#define BLOCK_SIZE 16
//GPU上初始化,N是
__global__ void gpu_initial(float* a, int N) {
int x = threadIdx.x + blockDim.x * blockIdx.x;
curandState state;
long seed = N;
curand_init(seed, x, 0, &state);
if (x < N) a[x] = curand_uniform(&state);
}
//使用共享内存
__global__ void sortFun(float* p_d, int N)
{
int x = threadIdx.x; //现在是一个一维的一个block
//定义动态内存,动态内存的长度是在初始化的时候 sortFun << <1, N, sizeof(float)*N >> > (d_in, N);sizeof(float)*N 指定共享内存的字节大小
extern __shared__ float temp_d[];
temp_d[x] = p_d[x];
__syncthreads(); //相当于是把所有数据都加载到temp_d之后才开始后面的排序操作
//奇偶排序,长度为N的数组需要排序N次,所以这里的for循环里面的N是对排序次数的循环,而不是数据
for (int i = 0; i < N; i++)
{
int j = i % 2; //先奇偶比,然后下一次才是偶奇比,也就是偶数次是奇偶比,奇数次是偶奇比
int idx = 2 * x + j;
if (idx + 1 < N && temp_d[idx] < temp_d[idx + 1])
{
float tep = temp_d[idx];
temp_d[idx] = temp_d[idx + 1];
temp_d[idx + 1] = tep;
}
__syncthreads(); //每排序一次,要等所有数据都判断完毕才进行下一轮的排序
}
p_d[x] = temp_d[x];
__syncthreads(); //所有数据都排序完毕且结束,程序结束
}
int main()
{
int m = 6;
int N = m;
float* p_d, *h_in, *h_out;
//cpu上开辟空间
h_in = (float*)malloc(N * sizeof(float));
h_out = (float*)malloc(N * sizeof(float));
//GPU上开辟空间
cudaMalloc((void**)&p_d, N * sizeof(float)); //将指针指向GPU的一个内存地址
使用循环赋值
//int values[] = { 1, 5, 4, 2, 6, 3};
//for (int i = 0; i < N; i++) {
// h_in[i] = values[i];
//}
//cudaMemcpy(p_d, h_in, N * sizeof(float), cudaMemcpyHostToDevice);
gpu_initial << <16, 16 >> > (p_d, N); //直接在GPU上初始化
cudaMemcpy(h_in, p_d, N * sizeof(float), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
printf("h_in \n ");
for (int i = 0; i < N; i++)
{
cout << h_in[i] << " ";
}
sortFun <<<1, N, sizeof(float)*N >>> (p_d, N);
// sort << <1, N, N * sizeof(float) >> > (p_d, N);
//将数据从GPU拷贝到CPU,同时指定拷贝的长度
cudaMemcpy(h_out, p_d, N * sizeof(float), cudaMemcpyDeviceToHost);
printf("\n h_out \n ");
for (int i = 0; i < N; i++)
{
cout << h_out[i] << " ";
}
cudaFree(p_d);
free(h_in);
free(h_out);
return 0;
}

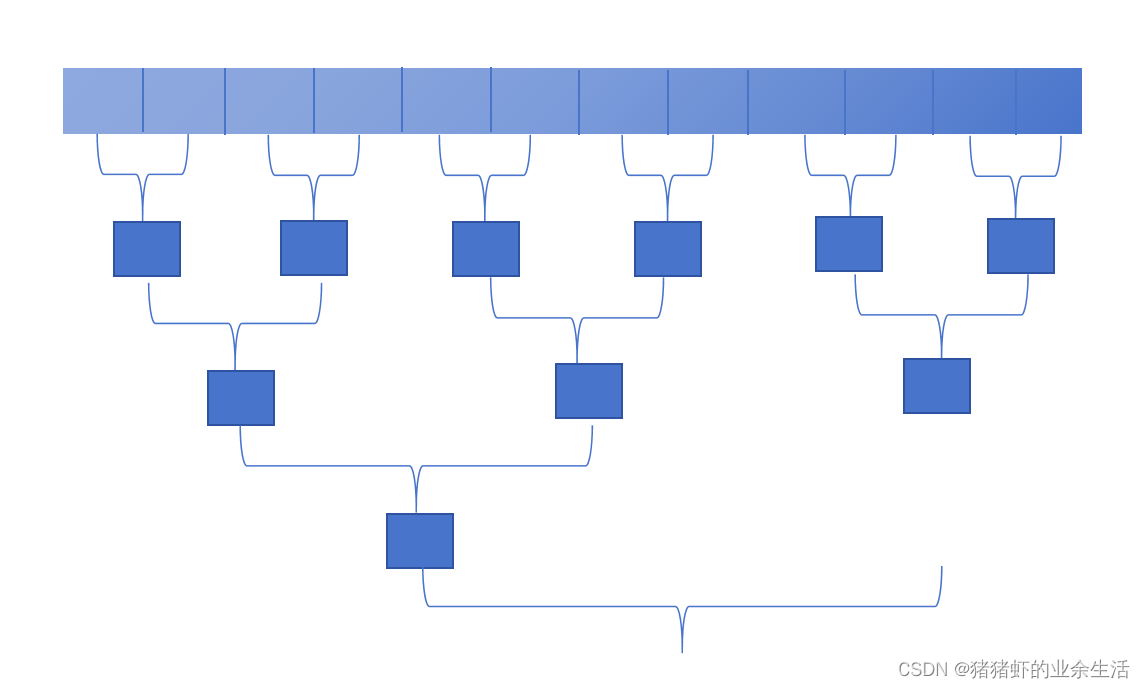
6 !!! 数组求和
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <iostream>
#include <curand.h>
#include <curand_kernel.h>
using namespace std;
#define ARRAY_SIZE 16
#define ARRAY_LENGTH 256
#define BLOCK_SIZE 16
//GPU上初始化,N是
__global__ void gpu_initial(float* a, int N) {
int x = threadIdx.x + blockDim.x * blockIdx.x;
curandState state;
long seed = N;
curand_init(seed, x, 0, &state);
if (x < N) a[x] = curand_uniform(&state);
}
void show(float* a, int m, int n)
{
for (int i = 0; i < m; i++)
{
for (int j = 0; j < n; j++)
{
// a[i] = add_one(a[i]);
cout << a[i * m + j] << " ";
}
cout << endl;
}
}
__global__ void reduce_kernel (float *data_in, float *data_out)
{
//现在是N个1维的block
int threadIDinAllBlock = threadIdx.x + blockDim.x*blockIdx.x;
int threadIDinOneBlock = threadIdx.x;
int blockID = blockIdx.x;
extern __shared__ float s_d[];
//共享内存是在一个blcok,但是传入的数据是分散到1024个block上
s_d[threadIDinOneBlock] = data_in[threadIDinAllBlock];
__syncthreads();
//for (int i = 0; i < N; i++)
//{
// printf("here s_d[%d] = %f \n",i, s_d[i]);
//}
//printf(" \n");
//对半求和,前一半数据的第一位数和后半数据的第一位数相加,。。。
//这里是算完一个block
for (int s = blockDim.x/2; s > 0; s >>= 1) //s >>= 1 是除以2的意思,数据依次是1024,512,256.。。。。
{
if (threadIDinOneBlock < s)
{
s_d[threadIDinOneBlock] += s_d[threadIDinOneBlock + s];
}
__syncthreads();
}
//输出1024个blcok的各自的结果
if (threadIDinOneBlock == 0)
{
data_out[blockID] = s_d[0];
/*printf("here s_d[0] = %f \n", s_d[0]);*/
printf("here data_out[%d] = %f \n", blockID, data_out[blockID]);
}
}
void cpu_reduce(float *d_in, float* d_mid, float* d_out, int N)
{
int threadNum = N;
int blocks = N / threadNum;
//printf("blocks = %d \n", blocks);
reduce_kernel << <blocks, threadNum, threadNum * sizeof(float) >> > (d_in, d_mid);
reduce_kernel << <1, threadNum, threadNum * sizeof(float) >> > (d_mid, d_out);
}
int main()
{
int m = 50;
int N = m*m;
float* d_in,*d_mid, *d_out, * h_in, * h_out;
//cpu上开辟空间
h_in = (float*)malloc(N * sizeof(float));
h_out = (float*)malloc(N * sizeof(float));
//GPU上开辟空间
cudaMalloc((void**)&d_in, N * sizeof(float)); //将指针指向GPU的一个内存地址
cudaMalloc((void**)&d_mid, m * sizeof(float));//一个block的大小
cudaMalloc((void**)&d_out, N * sizeof(float));
gpu_initial << <m, m >> > (d_in, N); //直接在GPU上初始化
cudaMemcpy(h_in, d_in, N * sizeof(float), cudaMemcpyDeviceToHost); //将数据从GPU拷贝到CPU,同时指定拷贝的长度
clock_t t_start_cpu = clock();
float sum = 0;
printf("in mian \n");
for (int i = 0; i < N; i++)
{
sum += h_in[i];
//cout << h_in[i] << " ";
}
cout << " \n";
cout << "sum_ cpu = " << sum << endl;
cout << " time in cpu = " << (double)(clock() - t_start_cpu) / CLOCKS_PER_SEC << endl;
cout << " \n";
cout << "----------------------- \n";
clock_t t_start_gpu = clock();
cpu_reduce(d_in, d_mid,d_out,N);
cudaDeviceSynchronize();
cudaMemcpy(h_out, d_out,N * sizeof(float), cudaMemcpyDeviceToHost);
cout << " SUM gpu : h_out = " << h_out[0] << endl;
cout << " time in GPU = " << (double)(clock() - t_start_gpu) / CLOCKS_PER_SEC << endl;
cudaFree(d_in);
cudaFree(d_out);
cudaFree(d_mid);
free(h_in);
free(h_out);
return 0;
}