文章目录
1. 概念
1.1 PID框图
1.2 具体示例:无人机高度控制
2. PID原理
3. 常用术语
4. 计算过程
4.1 比例控制(Proportional)
4.2 积分控制(Integral)
4.3 微分控制(Derivative)
5. 代码实现逻辑
7. 串级PID和代码实现
6. 模拟仿真
1. 概念
PID是应用最广泛的闭环控制方法之一,是一种常用的反馈控制方法,对于每个PID控制器由三个部分组成:比例控制(Proportional)、积分控制(Integral)和微分控制(Derivative)。
一般而言,目标值和反馈值为同种物理量,输出值可以是施加在被控物体上的控制量
举例:对物体进行位置控制时,目标值=目标位置,反馈值=当前位置,输出值=施加的驱动力大小,PID就能实时计算出驱动力使物体到达目标位置。
控制程序一般会定时运行PID算法,在每次运行时,先计算出误差=目标值-反馈值,然后分别由P、I、D三个环节根据误差计算出输出分量,三个分量加和即为最终输出值。
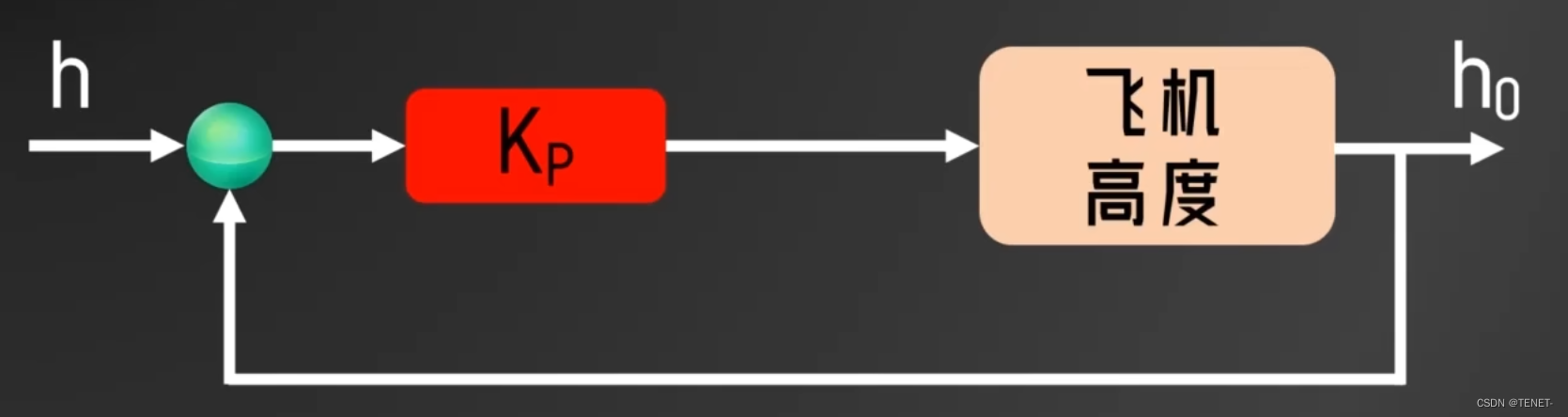
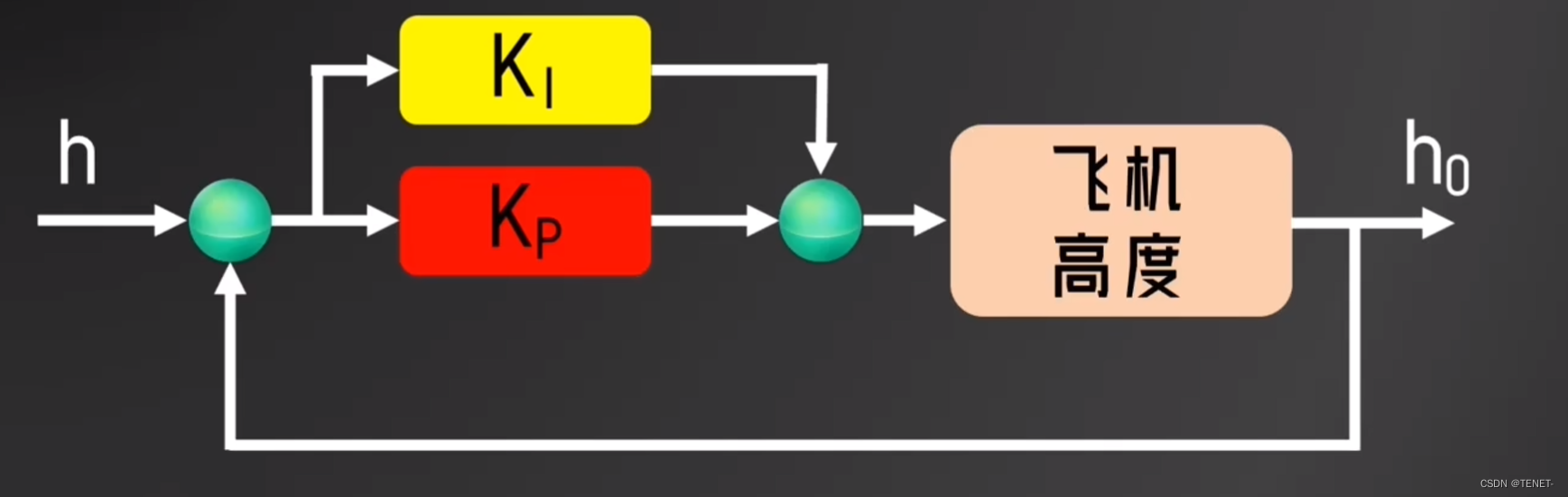
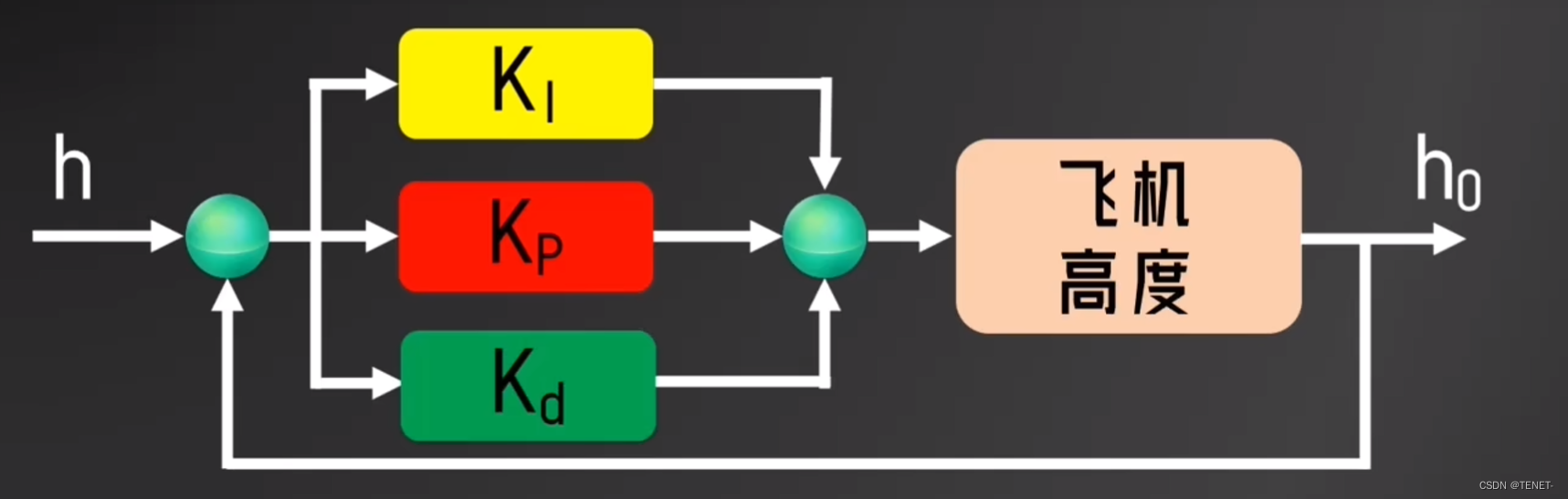
1.1 PID框图
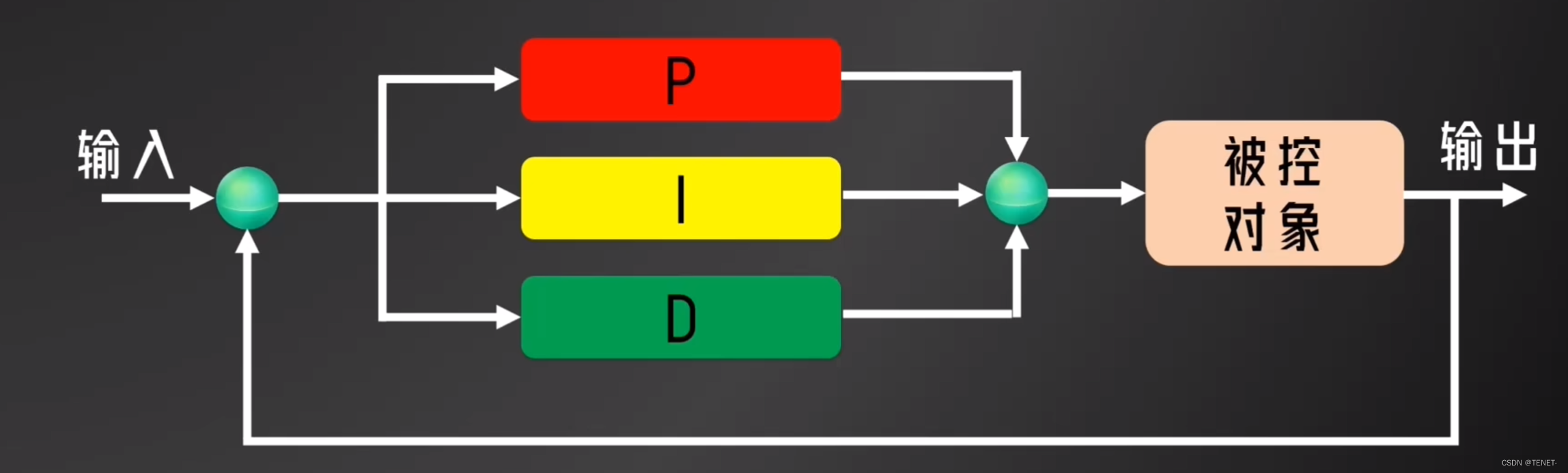
上图就是PID的信号框图,表示了PID的运行过程:
为系统指定一个目标值。PID将目标值与被控对象(无人机)当前的反馈量作差得到误差。PID将误差值分别经过三个环节计算得到输出分量,三个分量加起来得到PID的输出。将PID的输出施加到被控对象上,使反馈量向目标值靠拢。
PID三个环节的作用
由控制无人机案例我们可以总结出PID三个环节各自的主要作用和效应:
-
比例环节:起主要控制作用,使反馈量向目标值靠拢,但可能导致振荡。
-
积分环节:消除稳态误差,但会增加超调量。
-
微分环节:产生阻尼效果,抑制振荡和超调,但会降低响应速度。
PID中物理量的设计
我们在设计PID时主要关注三个量:目标值、反馈值、输出值。PID会根据目标值和反馈值计算输出值。
需要强调的是,PID并不知道被控对象是什么,它仅负责进行数值计算,而我们——作为控制系统的设计者,就需要为PID指定这三个量所对应的实际物理量,这在不同的控制系统中是不一样的。
如何确定实际物理量
我为大家总结了一个常用准则:
- 目标值和反馈值:
- 通常为同种物理量,就是你需要控制的物理量。
- 输出值:
- 通常是直接驱动被控对象的控制量。
- 输出量作用在被控对象上需要经过时间积累才会产生反馈量的变化,换言之,输出值通常为反馈值对于时间的低阶物理量。例如:目标值和反馈值为位置,则输出值可以为速度或加速度。
对于线性关系的两个物理量(只差一个系数),可以直接替换。例如:目标和反馈值为无人机的位置,根据上一条准则,输出值可以为加速度。但我们无法直接控制加速度,只能控制推力大小,由于由于高度的变化是由推力产生的,且推力与加速度只差一个系数(F=ma),因此可以将输出值直接定为推力。
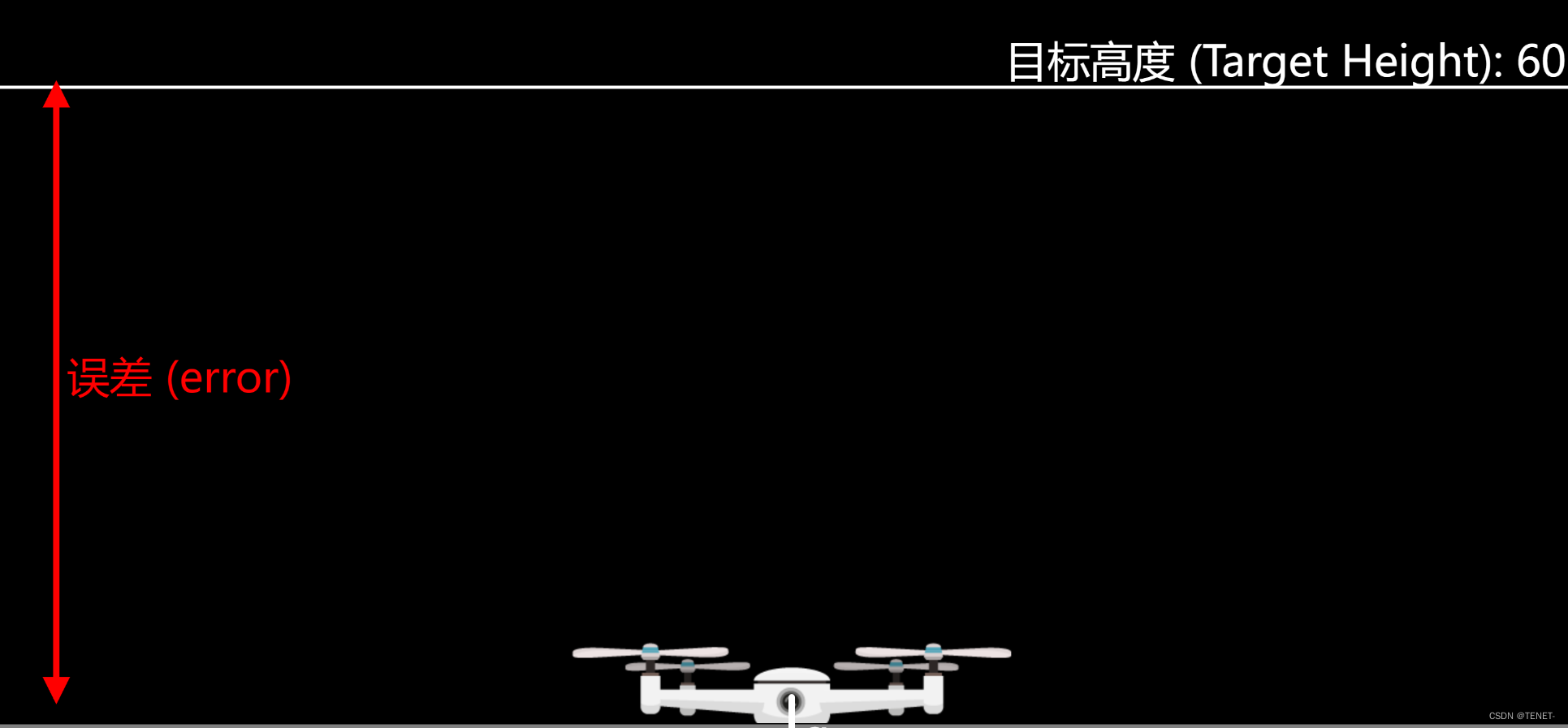
1.2 具体示例:无人机高度控制
-
目标值(Setpoint):无人机希望达到的高度,例如10米。
-
反馈值(Measured Value):无人机当前的实际高度,例如8米。
-
误差(Error):
- 目标高度与实际高度的差值。误差 = 目标高度 - 实际高度 = 10米 - 8米 = 2米。
-
输出值(Output):
- 控制电机的推力大小,以使无人机的高度向目标高度靠拢。
- 由于推力与加速度成正比,我们可以将输出值设为推力。通过调整推力来改变无人机的加速度,从而改变高度。
2. PID原理
这是一个通过PID控制水管进出水流量的例子。让我们详细解释这个例子:
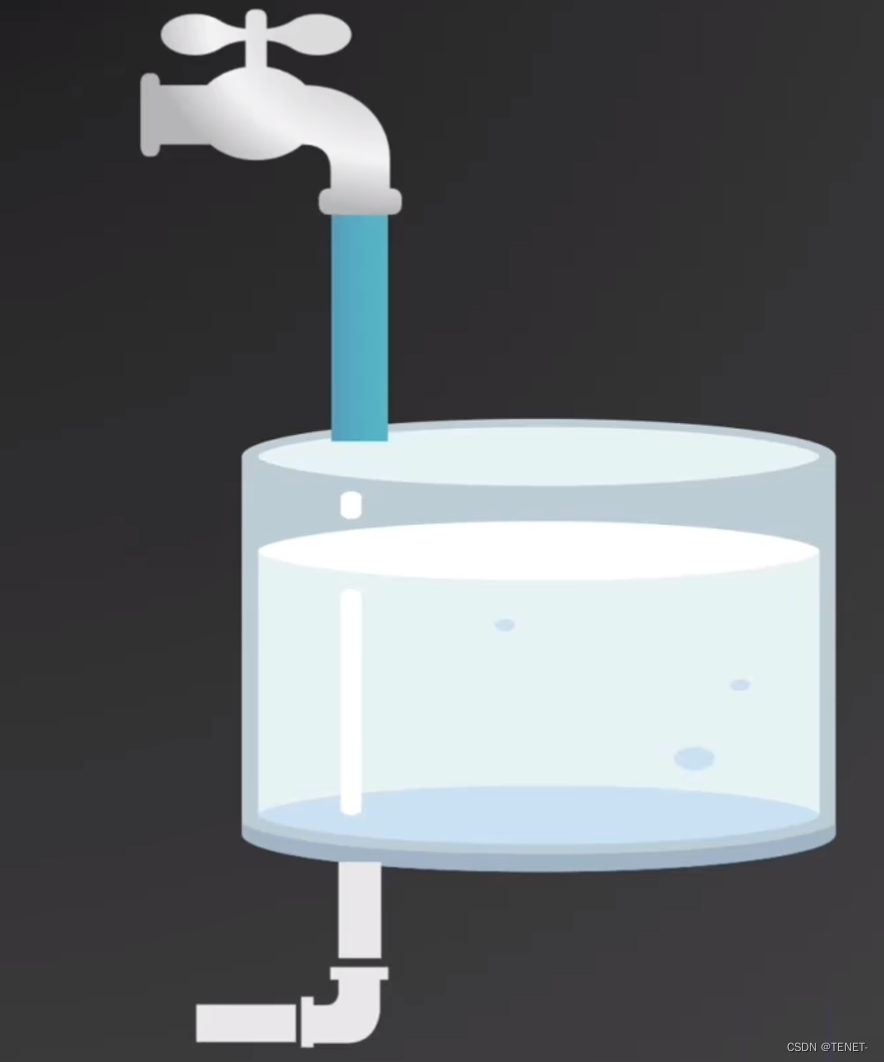
图示说明
- 阀门:水管中间有一个阀门,通过调节阀门的开度来控制水流量。
- PID控制器:控制系统通过PID控制器来调节阀门,以控制水流量。
- 流量传感器:水管上有流量传感器,用来测量当前的实际流量。
工作原理
- 设定值:系统有一个预期流量值(设定值),这是希望达到的水流量。比如2L/S.
- 测量值:流量传感器实时测量当前的实际流量。
- 误差计算:PID控制器将实际流量与预期流量进行比较,得到误差值(误差 = 预期流量 - 实际流量)。
- 控制输出:
- 比例控制(P):根据当前误差值直接调节阀门的开度。误差越大,调整幅度越大。
- 积分控制(I):根据误差随时间的累积来调节阀门,以消除持续的偏差。积分控制能消除系统的稳态误差。
- 微分控制(D):根据误差变化的速度来调节阀门,预见并平滑误差的变化,减少超调和振荡。
实际操作
- 启动时:当系统启动时,PID控制器根据初始误差进行较大的调整,使流量迅速接近设定值。
- 稳定阶段:当实际流量接近设定值时,比例控制器的作用减小,积分控制器确保误差归零,微分控制器平滑误差变化,避免波动。
- 扰动响应:当系统受到外部扰动(如水压变化)时,PID控制器会重新计算误差,并调整阀门,以重新达到设定的流量值。
3. 常用术语
- 被控对象:需要控制的对象。例如,温度控制中的加热器、速度控制中的电机等。
- 目标值(Setpoint):期望被控对象达到的状态量。例如,温度控制中的期望温度、速度控制中的目标速度。
- 反馈值(Measured Value):被控对象当前时刻的状态量。例如,当前的温度、当前的速度。
- 增益(Gain):比例、积分和微分部分的放大系数,分别是Kp、Ki和Kd。
- 输出量(Output):PID的计算结果,用于调整被控对象的控制力。例如,加热器的功率、驱动电机的电压。
- 误差(Error):目标值与反馈值之间的差异。公式为:误差 = 目标值 - 反馈值。
- 稳态误差(Steady-State Error):系统在稳定状态下仍然存在的误差。例如,加入干扰后仍存在的误差。
- 阶跃输入(Step Input):在系统稳定状态下,目标值发生突然变化。例如,目标温度从20°C突然升高到25°C。
- 阶跃响应(Step Response):阶跃输入后,被控对象的响应状态,能够代表系统的控制性能。
- 瞬态响应(Transient Response):系统从初始状态到达到稳态的过渡过程,包括上升时间、超调量和调节时间等。
- 响应速度(Response Speed):阶跃输入后,被控对象再次到达目标值的速度。
- 超调量(Overshoot):阶跃输入后,被控对象到达目标值后超出目标值的距离。
4. 计算过程
这里用无人机的高度控制来举例
4.1 比例控制(Proportional)
假如让无人机悬停在10米的高度,但此时高度为2米,所以此时误差(error)为8米,假设Kp=0.5,比例控制每次调节的高度就为:
Kp * error
所以第一次调节为 0.5*8=4,此时误差变为4米。
第二次调节:0.5*4=2,此时误差变为2米。
依次进行调节,误差逐渐变小。这个过程就叫做比例调节。
Kp值越大,系统反应速度越快,无人机更快靠近误差。
但是比例控制的缺点为两点:
- 干扰:容易受到外界干扰,比如此时有持续的风将无人机向下吹,导致无人机同一周期向下1米,此时比例控制的计算结果为0.5*2=1,所以,这会导致无人机永远保持在八米的高度,误差保持在2米。这也叫做稳态误差。
- 震荡:Kp值越大,系统反应速度越快,无人机更快靠近误差,但同时无人机在接近目标高度时,产生的震荡也越严重。
为了消除稳态误差的问题,就需要用到积分控制(Integral)。
为了消除系统震荡的问题,就需要用到微分控制(Derivative)。
4.2 积分控制(Integral)
积分控制是对之前计算的所有的误差求和,也就是在离散的情况下做累加,比如无人机经过两次调节,第一次误差为8米,第二次误差为4米,加起来就是12米,假如Ki=0.1,计算结果为:

0.1*12=1.2,所以及时有向下持续的风影响无人机,由于积分控制,无人机还是会向上走1.2米。
所以积分控制会对误差进行累计,从而提供更大的升力,让无人机慢慢的朝着目标点靠近,最终误差消除为0。
所以经过第三次调节,累计误差从12调整到了12.8,那么第四次调节的结果0.1*12.8=1.28。
但此时无人机距离目标高度仅为0.8米,如果还是调节1.28米,就会出现过冲现象。
此时就需要使用微分控制进行更细致的调节。
4.3 微分控制(Derivative)
微分控制就是通过当前时刻与前一刻误差量的差值对未来做预测。如果差值为正,就表示误差在变大,为负就表示误差在减小。如果误差在变大,就会加大控制强度,让误差降下来。如果误差减小,就会减小控制强度,让无人机平稳缓和的到达指定值。

这里也就相当于对距离求微分:
d(error)/dt = 速度
微分控制算法可以对无人机的速度做出响应,当无人机的速度过快时,微分控制会抵消一部分由比例控制计算出来的升力,从而减缓系统的震荡。所以当我们提高Kd的值,系统的震荡会逐步减小。
但无论是比例,积分还是微分控制,数值调的过大,无人机就会出现过冲现象。
5. 代码实现逻辑
这段伪代码实现了一个基本的PID控制算法。
previous_error := 0
integral := 0
loop:
error := setpoint - measured_value //计算误差
integral := integral + error * dt //计算积分
derivative := (error - previous_error) / dt //计算微分
output := Kp * error + Ki * integral + Kd * derivative //计算控制输出
previous_error := error //更新前一次误差
wait(dt) //等待并循环
goto loop
- previous_error 用于存储前一次循环中的误差值,初始化为0。
- integral 是积分部分的累加值,初始化为0。
- error 是当前的误差,等于设定值(setpoint)减去测量值(measured_value)。
- 积分部分通过累加误差乘以时间步长(dt)来实现。这个部分用于消除系统的稳态误差。
- 微分部分通过当前误差减去前一次误差,再除以时间步长(dt)来实现。这个部分用于预测误差的变化趋势,从而提前进行调整。
- 控制输出(output)是比例、积分和微分三部分的加权和。
- Kp 是比例增益,对应 error。
- Ki 是积分增益,对应 integral。
- Kd 是微分增益,对应 derivative。
- 将当前的误差值存储到 previous_error 中,以便下次循环使用。
这段伪代码通过不断地测量误差、累积积分和计算误差变化率,动态调整控制输出,使系统的实际值尽量接近设定值。
7. 串级PID和代码实现
串级PID可增加系统的稳定性,抗干扰能力更强,包括代码实现可以看下面这篇:
串级PID控制算原理及法详解-CSDN博客
6. 模拟仿真
下面这个网站可以模拟调节PID参数来控制无人机
Webpack App