目录
🚩多线程代码的健壮性
🚩多线程控制
🚩线程返回值问题
🚩关于Linux线程库
🚩对Linux线程简单的封装
在观看本博客之前,建议大家先看一文搞懂Linux多线程【上】由于上一篇博客篇幅太长,为了更好的阅读体验,我拆成了两篇博客。那么接下来,在上一篇的基础上,我们继续学习Linux信号部分。今天,我们主要学习Linux多线程控制问题。
🚩多线程代码的健壮性
一份代码写的如何,一项重要的指标就是这份代码的健壮性
我们来写一份代码:
#include<pthread.h>
#include<iostream>
#include<unistd.h>
#include<cassert>
using namespace std;
int g_val=0;
void* pthread_routine(void *args)
{
while(1)
{
cout<<"我是新进程,我正在运行,g_val:"<< g_val++<<" &g_val: "<<&g_val<<endl;
int n=0;
n=n/0;
// 发生除零错误,
sleep(1);
}
}
int main()
{
pthread_t tid;
int n=pthread_create(&tid,nullptr,pthread_routine,(void *)"thread one");
assert(n==0);
(void)n;
while(1)
{
cout<<"我是主进程,我正在运行,g_val:"<<g_val<<" &g_val:"<<&g_val<<endl;
sleep(1);
}
return 0;
}在新线程中,出现了除零错误。
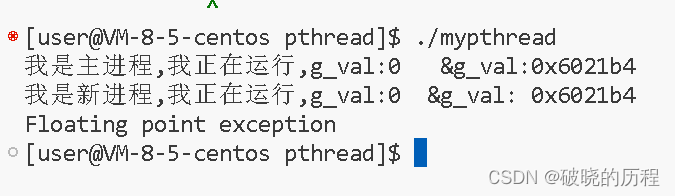
我们发现:新线程和主线程一起被干掉了。为什么?
这是因为代码中出现了错误,操作系统堆整个进程发送信号,操作系统要回收这个进程的资源,而线程是从进程那里得到的字眼,进程都没了,线程也就没法存在了。这个进程中的所有的线程都会被终止。
举个例子:在某互联网大厂,张三是一名程序员,他所在项目组敷个某个程序的开发。有一天,张三在写代码之前干了一瓶二锅头,代码中出现了很严重的bug,张三写代码出现了问题,就是这个项目组出现了问题。公司要对这个事情做出惩罚。所以就对张三的项目组长进行了谈话和警告。这个项目组就是一个进程,项目组的每一个成员就是一个线程(轻量级进程)。成员出现了错误,自然要惩罚这个项目组。
所以:多线程的代码的健壮性非常不好,这也是线程很大的一个缺点。
🚩多线程控制
Linux多线程控制是一个很重要的部分,这其中包括线程创建,线程等待,线程替换等等话题。
🚀Linux线程创建
我们在之前讲过如何创建线程,今天,我想一次性创建多个线程。让一个进程中包括若干个执行流。并同时运行。
#include<pthread.h>
#include<iostream>
#include<unistd.h>
#include<cassert>
using namespace std;
void *start_routine(void *args)
{
char *buf=static_cast<char*>(args);
int cnt=10;
while(cnt)
{
cout<<"我是新线程, "<<buf<<" cnt:"<<cnt<<endl;
cnt--;
sleep(1);
}
}
int main()
{
for(int i=0;i<10;i++)
{
pthread_t id;
char buffer[64];
snprintf(buffer,sizeof buffer,"%s:%d","thread",i);
pthread_create(&id,nullptr,start_routine,buffer);
}
while(1)
{
cout<<"我是新线程,我一直在运行"<<endl;
sleep(1);
}
}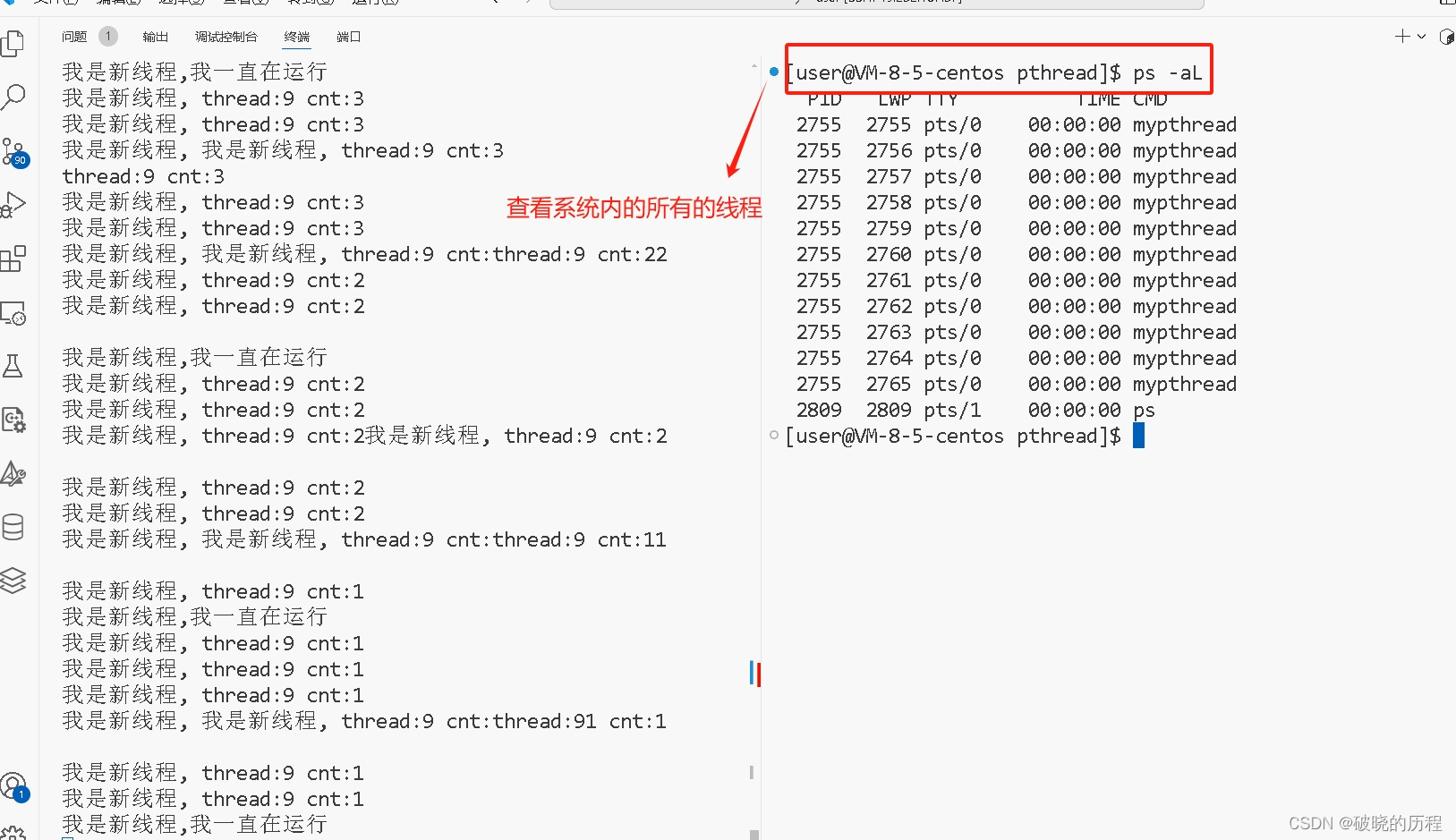
我们发现:我们创建的新线程的打印信息都是thread:9 。但是我们通过命令查询到我们的确创建了多个线程。但为什么都是9号呢?
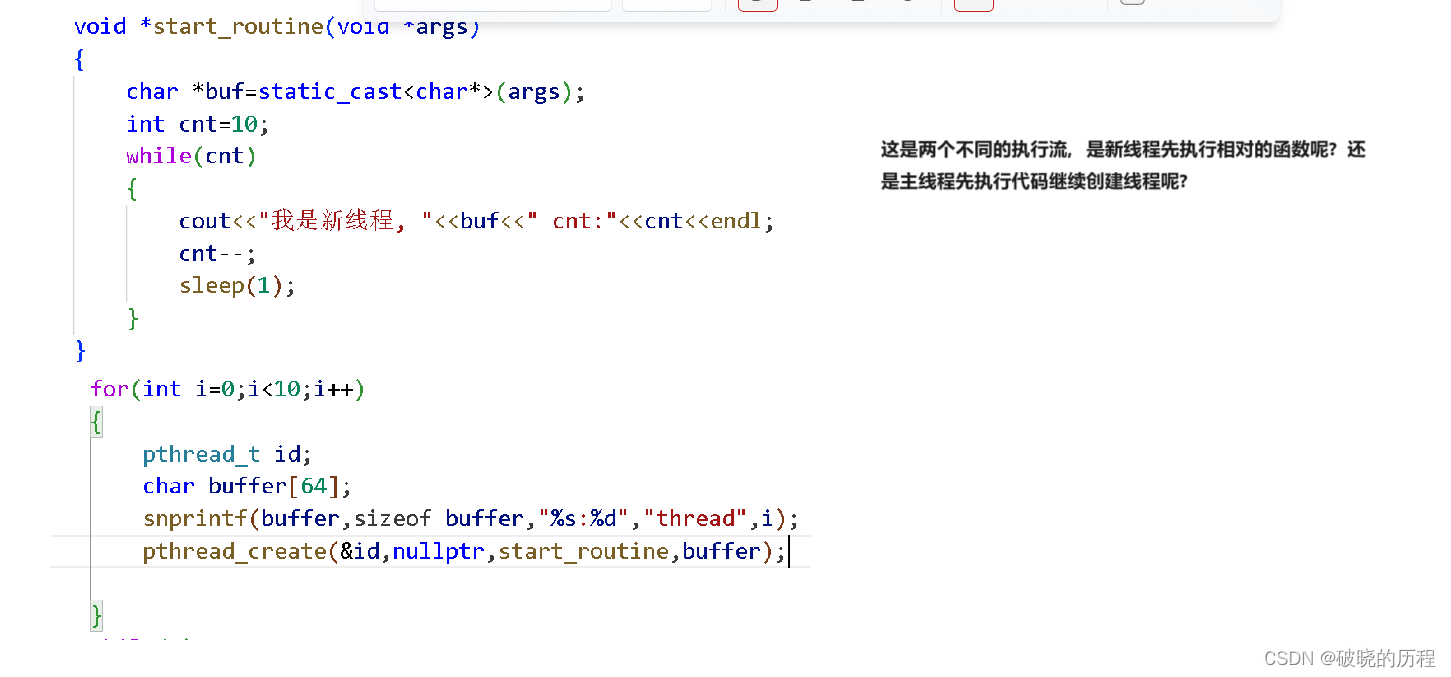
我们知道,如上的两点代码是两个不同的执行流,究竟是哪个执行流先被执行呢?不确定,这是由编译器的调度顺序决定的。但是我们的运行的结果证明是主线程先被执行。为什么?
我们在for循环中定义了一个字符串,在pthread_create循环中传入了字符串的起始地址。有没有可能这块空间里的内容在被打印之前就被修改了呢?事实证明就是如此。主线程在新线程读取字符串内容之前,先将字符串的内容进行了修改。
这种现象的背后的根本原因是:字符串是一个共享资源,被所有线程所共享。由此造成这一系列问题。
如何更改这种现象呢?
#include<pthread.h>
#include<iostream>
#include<unistd.h>
#include<cassert>
using namespace std;
class Threads
{
public:
pthread_t id;
char buffer[64];
};
void* pthread_routine(void *args)
{
int cnt=5;
Threads *newThreads=static_cast<Threads *>(args);
while(cnt--)
{
cout<<"new thread make success,name: "<<newThreads->buffer<<" cnt:"<<cnt<<endl;
sleep(1);
}
// delete newThreads;
// return nullptr;
}
int main()
{
for(int i=0;i<10;i++)
{
Threads *id=new Threads();
snprintf(id->buffer,sizeof(id->buffer),"%s:%d","thread", i);
pthread_create(&id->id,nullptr,pthread_routine,id);
}
while(1)
{
cout<<"我是主进程,我正在运行"<<endl;
sleep(1);
}
return 0;
}我们顶定义一个类,每个线程被创建之初都会创建一个独立的类对象,这个类归线程所属,是私有的,所以不会出现上面的情况,关于这个类的相关数据储存在哪里,我们后面再谈。
接下来,我们就改过的代码来回答几个问题:
在这份代码中,start_routine函数被几个执行流执行呢?10个
start_routine函数处于什么状态?可重入状态。
那这个函数是可重入函数吗?是的。
这个函数内的变量是被所有的线程共享的吗?我们实验一下:
我们对打印内容做稍稍改动:
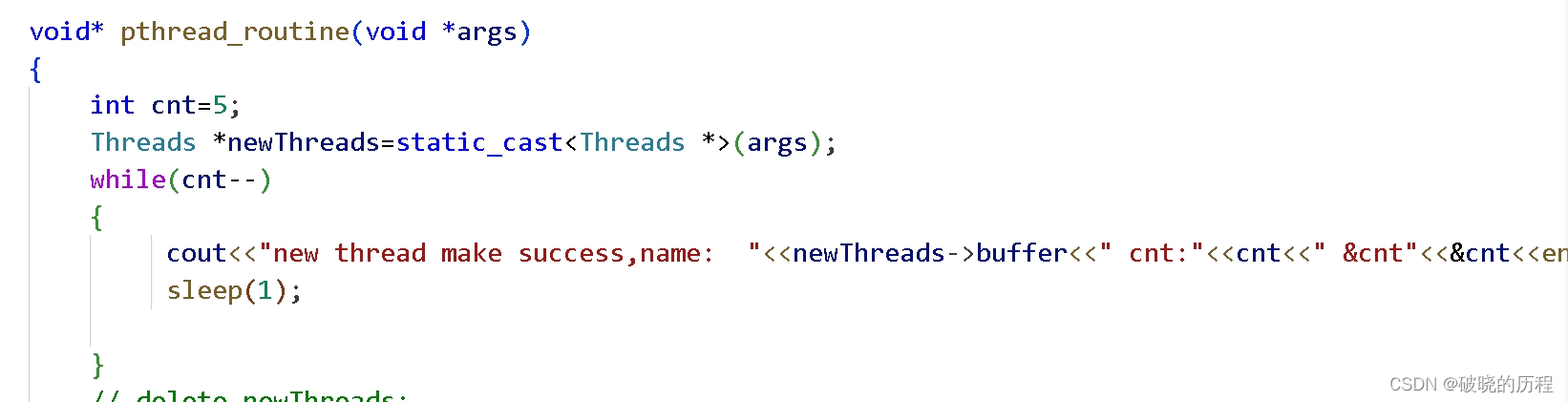
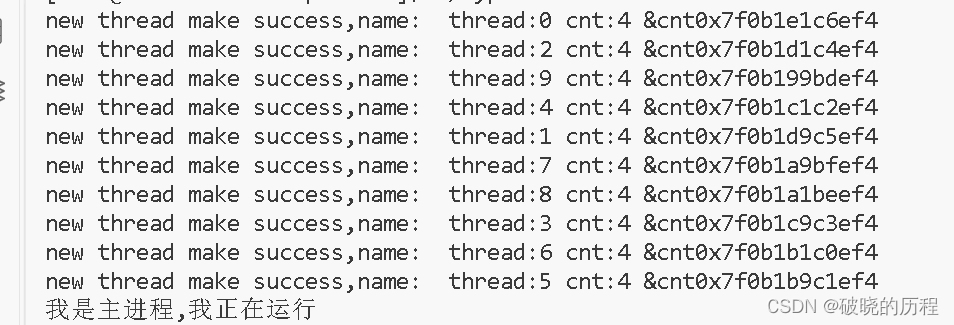
我们发现:不同的执行流的cnt地址都不同,说明每一个线程都有一个独立的栈结构。 至于在什么位置,我们后面再说。
线程创建我们掌握了,那如何让线程终止呢?
🚀Linux线程终止
方法一
在线程对应的代码中,return返回,这个线程就终止了。
但是不能调用exit函数,我们说过exit是用来终止进程的,这时所有的线程都会跟着终止。
方法二
调用pthread_exit函数
该函数的作用是终止调用这个函数的线程。

参数我们默认设为nullptr。
方法三
一个跑起来的线程是可以被取消的。取消线程的函数为pthread_cancel。下面,我们简单介绍一下:
#include <pthread.h>
int pthread_cancel(pthread_t thread);参数很简单,一看就明白
返回值:成功时返回0,失败错误码被设置。
下面,我们感受一下:
#include<pthread.h>
#include<iostream>
#include<unistd.h>
#include<cassert>
#include<vector>
#include<string>
using namespace std;
class Threads
{
public:
pthread_t id;
char buffer[64];
};
class ThreadReturn
{
public:
int return_result;
int return_code;
};
void* pthread_routine(void *args)
{
int cnt=5;
Threads *newThreads=static_cast<Threads *>(args);
while(cnt--)
{
cout<<"new thread make success,name: "<<newThreads->buffer<<endl;
sleep(1);
}
return (void*)123;
}
int main()
{
vector<Threads *> iter;
for(int i=0;i<10;i++)
{
Threads *id=new Threads();
snprintf(id->buffer,sizeof(id->buffer),"%s:%d","thread", i);
pthread_create(&id->id,nullptr,pthread_routine,id);
iter.push_back(id);
}
sleep(5);
// 将创建的线程先取消一半
for(int i=0;i<iter.size()/2;i++)
{
pthread_cancel(iter[i]->id);
cout<<"pthread_cancel:"<<iter[i]->buffer<<" successful"<<endl;
}
for(auto &it:iter)
{
void *ret;
int n = pthread_join(it->id, (void**)&ret);
assert(n == 0);
cout << "join " << it->id << " successful" <<(long long)ret<< endl;
}
cout<<"main thread quit"<<endl;
}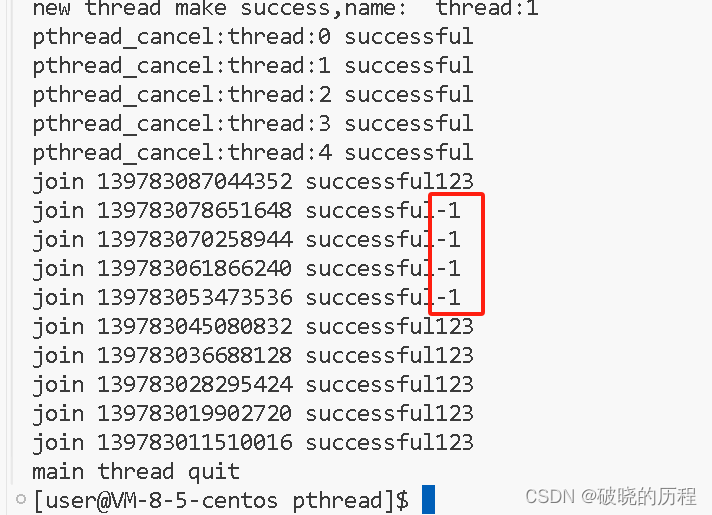
如果一个线程被pthread_cancel取消,这个线程的返回值会被设为-1。
🚀Linux线程等待
线程也是需要等待的,如果不等待,会造成类似僵尸进程问题,否则会造成内存泄漏。线程必须要被等待的。等待工作需要:
- 获取新线程的退出信息。
- 回收新线程对应的PCB资源,防止内存泄漏。
所以,我们有必要且必须对线程进行等待,线程等待函数是pthread_join。下面,我们简单介绍一下这个函数。
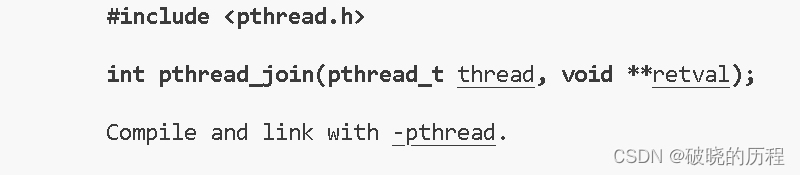
参数:
第一个参数为:要等待的线程的thread,第二个我们先不需要了解,默认为nullptr。
返回值:
等待成功,返回0;等待失败,返回相应的错误码。
接下来,我们来试一下:
#include<pthread.h>
#include<iostream>
#include<unistd.h>
#include<cassert>
#include<vector>
using namespace std;
class Threads
{
public:
pthread_t id;
char buffer[64];
};
void* pthread_routine(void *args)
{
int cnt=5;
Threads *newThreads=static_cast<Threads *>(args);
while(cnt--)
{
cout<<"new thread make success,name: "<<newThreads->buffer<<" cnt:"<<cnt<<" &cnt"<<&cnt<<endl;
sleep(1);
}
pthread_exit(nullptr);
}
int main()
{
vector<Threads *> iter;
for(int i=0;i<10;i++)
{
Threads *id=new Threads();
snprintf(id->buffer,sizeof(id->buffer),"%s:%d","thread", i);
pthread_create(&id->id,nullptr,pthread_routine,id);
iter.push_back(id);
}
for(auto &it:iter)
{
int n=pthread_join(it->id,nullptr);
assert(n==0);
cout<<"join "<<it->id<<" successful"<<endl;
}
cout<<"main thread quit"<<endl;
}运行一下:
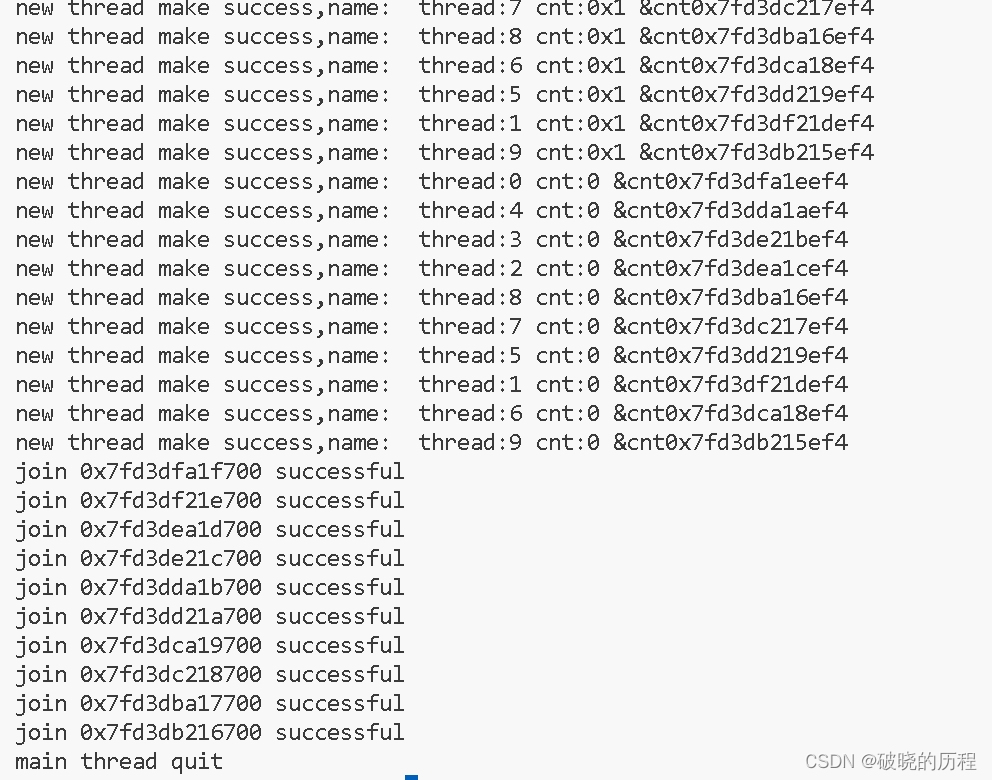
如我们所见:所有的线程同一时间全部退出,接着主线程退出。
🚀Linux线程分离
- ‘’默认情况下,新创建的线程是joinable的,线程退出后,需要对其进行pthread_join操作,否则无法释放资源,从而造成系统泄漏。
- 如果不关心线程的返回值,join是一种负担,这个时候,我们可以告诉系统,当线程退出时,自动释放线程资源。
- 一个线程被分离,就不能调用pthread_join()进行线程等待。
接下来,我们简单介绍一下几个函数。
pthread_self()
#include <pthread.h>
pthread_t pthread_self(void);使用起来很简单,作用就是返回调用该线程的Id。由于太简单,这里我们就不再演示了。
pthread_detech()
#include <pthread.h>
int pthread_detach(pthread_t thread);参数很简单,要对哪个线程进行分离,就传入哪个线程的Id。
返回值;成功的话,返回0;失败时,错误码被设置。
接下来,我们尝试使用一下:
#include<pthread.h>
#include<iostream>
#include<unistd.h>
#include<cassert>
#include<vector>
#include<string>
#include<cstring>
using namespace std;
string changeId(const pthread_t &id)
{
char buffer[128];
snprintf(buffer,sizeof buffer,"0x%x",id);
return buffer;
}
void *start_routine(void *args)
{
pthread_detach(pthread_self());
int cnt=5;
while(cnt)
{
cout<<"new spthread running..... Id:"<< changeId(pthread_self())<<endl;
sleep(1);
cnt--;
}
}
int main()
{
pthread_t id;
int n=pthread_create(&id,nullptr,start_routine,(void*)"thread noe");
assert(n==0);
(void)n;
pthread_detach(id);
sleep(5);
return 0;
}这个函数的调用原则为:一般让主线程对新线程进行分离,在主线程中进行调用。
🚩线程返回值问题
我们刚刚在讲解pthread_join()和pthread_exit()函数时,我们一般将参数设为nullptr。至于原因,我们当时没说,现在我们就来分析一下这些参数。这些参数都是输出
一切的一切都在告诉我们这个参数不简单,我们先写个代码试一下这个参数的作用。
#include<pthread.h>
#include<iostream>
#include<unistd.h>
#include<cassert>
#include<vector>
using namespace std;
class Threads
{
public:
pthread_t id;
char buffer[64];
};
void* pthread_routine(void *args)
{
int cnt=5;
Threads *newThreads=static_cast<Threads *>(args);
while(cnt--)
{
cout<<"new thread make success,name: "<<newThreads->buffer<<endl;
sleep(1);
}
return (void*)123;
}
int main()
{
vector<Threads *> iter;
for(int i=0;i<10;i++)
{
Threads *id=new Threads();
snprintf(id->buffer,sizeof(id->buffer),"%s:%d","thread", i);
pthread_create(&id->id,nullptr,pthread_routine,id);
iter.push_back(id);
}
for(auto &it:iter)
{
void *ret;
int n=pthread_join(it->id,&ret);
assert(n==0);
cout<<"join "<<it->id<<" successful"<<" ret:"<<(long long)ret<<endl;
}
cout<<"main thread quit"<<endl;
}我们在线程调用的函数中返回了 return (void*)123;
运行一下:
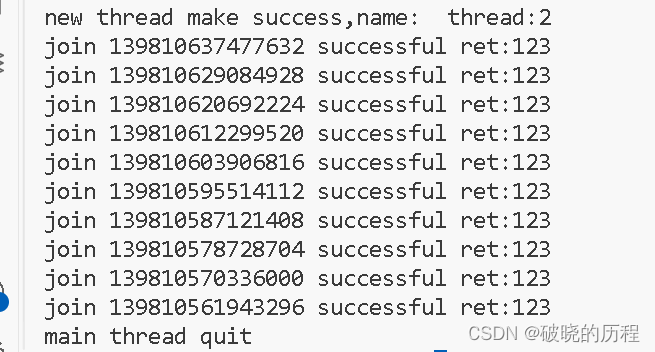
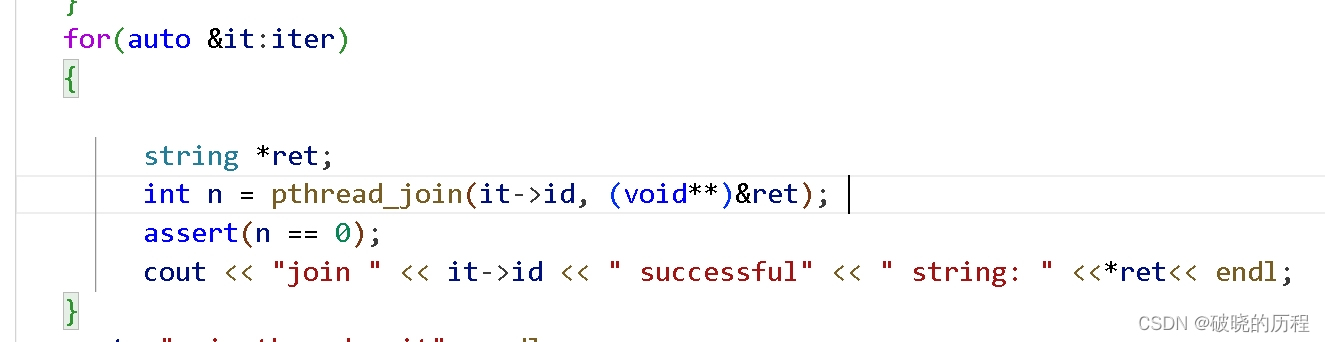
看,我们输入的123成功读取到了 。我们是怎么做到的?为了方便叙述,我将相关的代码块拎出来。
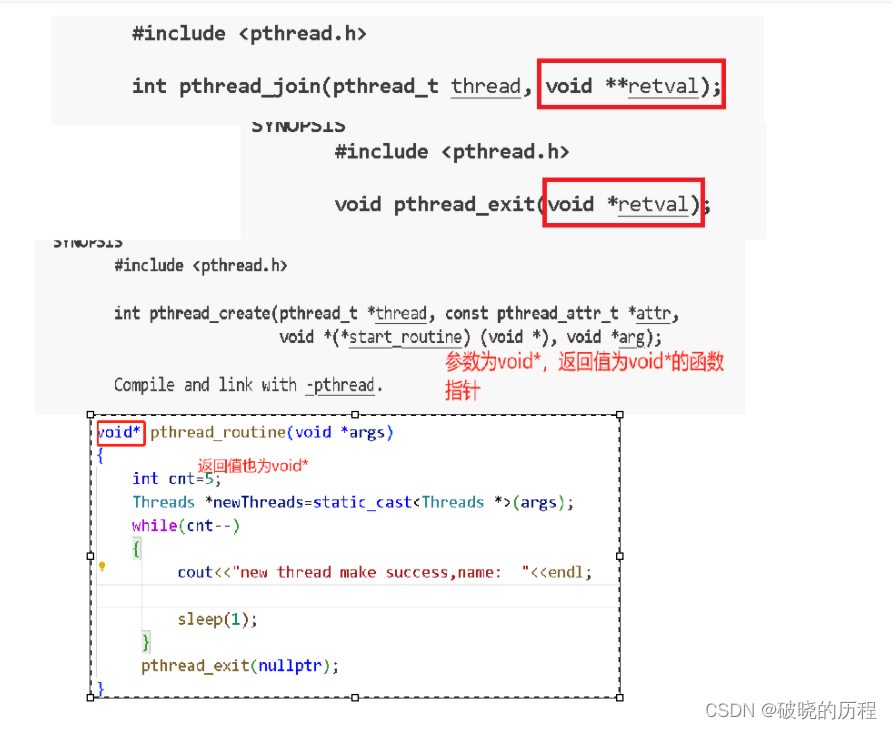
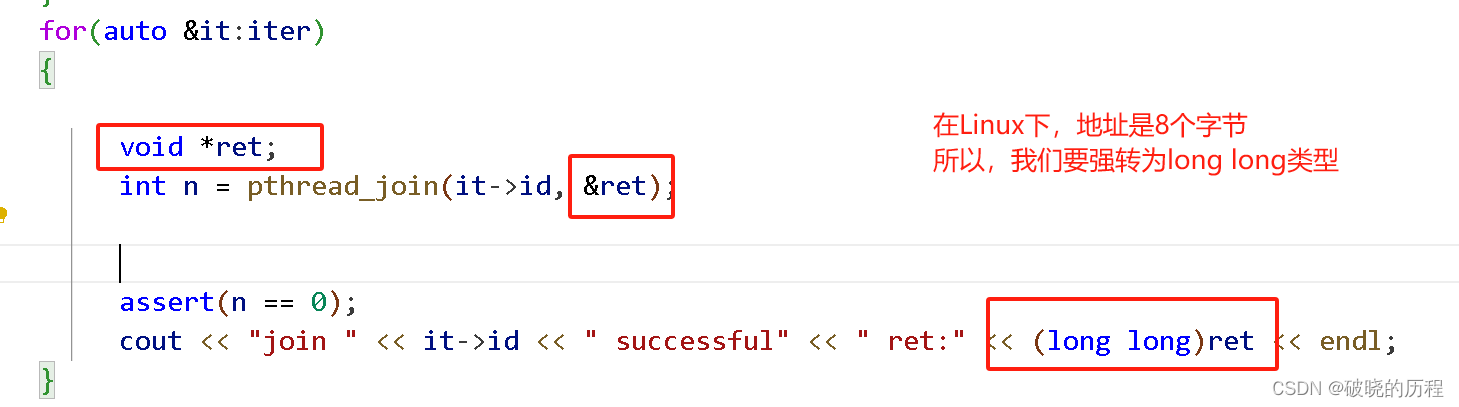 请看如下图:pthread_join的第二个参数是输出型参数
请看如下图:pthread_join的第二个参数是输出型参数
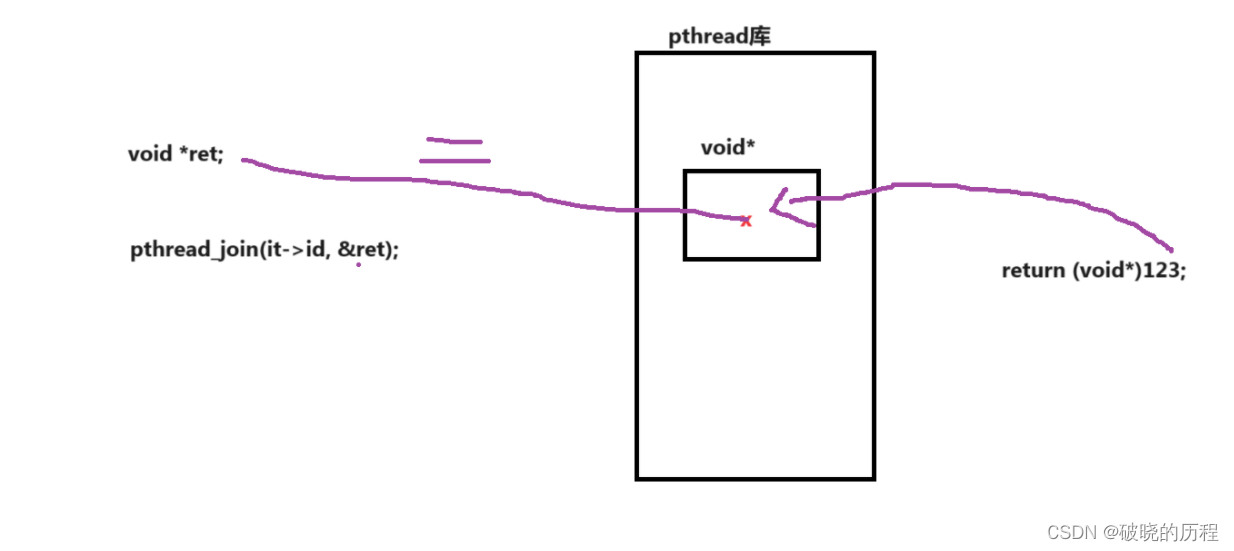
在pthread库中,有一个变量存储的数据为void* 。我们将在线程函数的返回值强转成void*,存储在这个变量中,我们暂且将这个存储的数据叫做X数据。
现在,我们在代码层面同样定义了一个void*的变量ret。如何将X数据转到我们用户层面的ret中呢?办法有两种:
方案1:直接把x的值赋值给ret。因为他们都是一级指针,解引用就可以得到数据(123)。
方案2:对ret取地址,对数据X取地址,都得到二级指针,然进行赋值,再解引用得到数据(123)。
在这里,OS采用的是第二种方式。因为我们调用的是函数来获取,无法实现简单的赋值。
接下来,我们看图理解一下
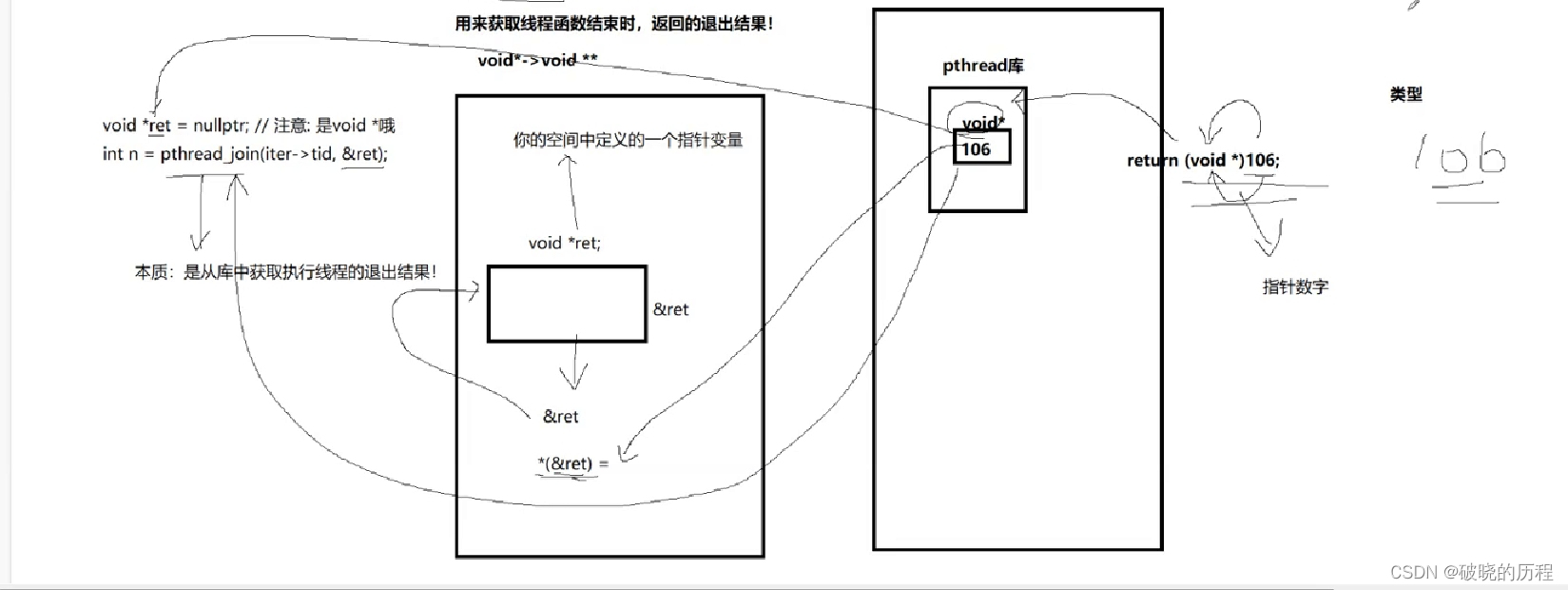
大家懂的话,可以返回任意类型的数据,但是:必须是new出来的类型,因为new出来的类型不会因为出了函数空间被释放。接下来,我给大家示范一下:
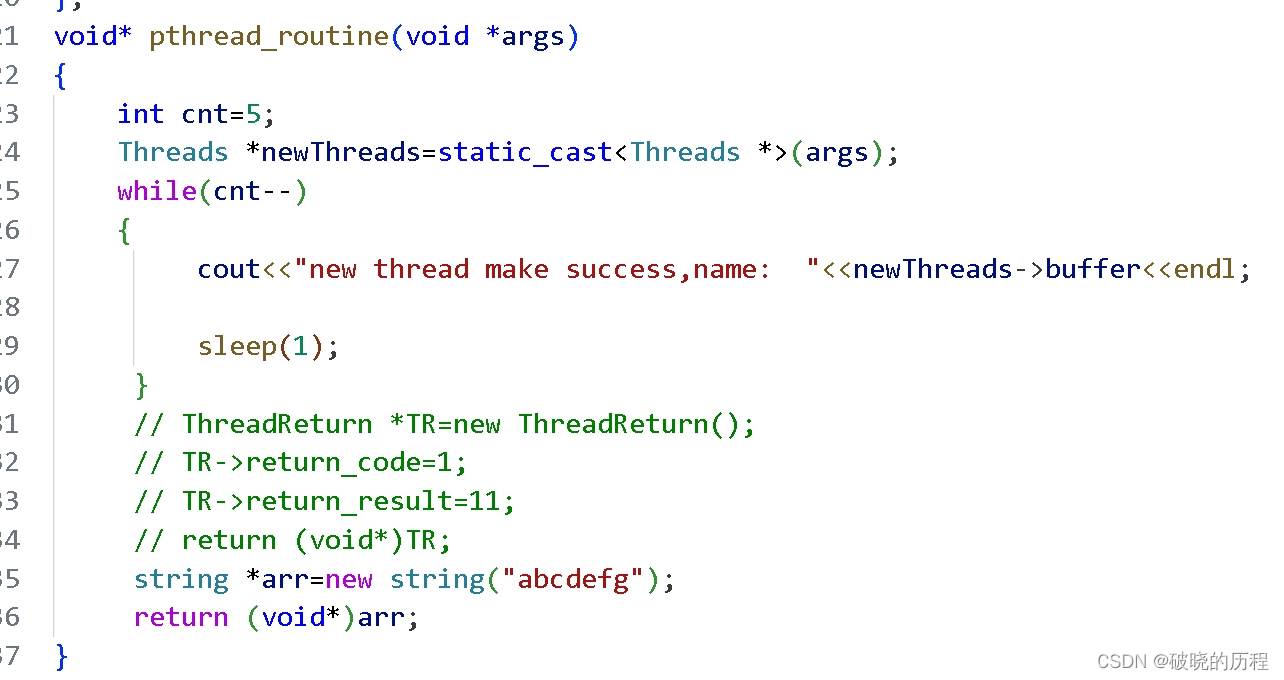
来看:
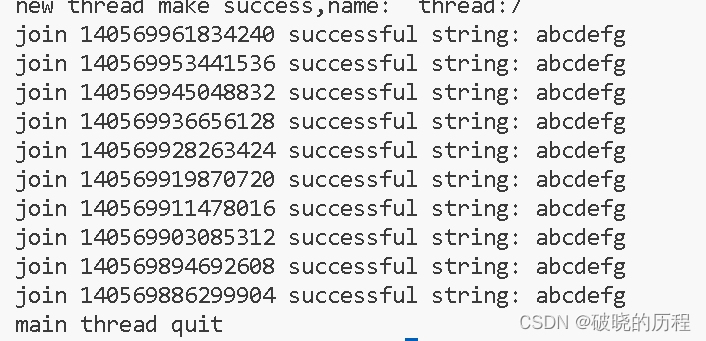
成功打出来。
进程退出时,都会设置对应的退出码,线程这里为什么没有退出码呢?
线程异常,收到信号,整个进程都会退出。
pthread_join默认就认为函数可以调用成功,不考虑异常,异常是进程应该来考虑的事情。
🚩关于Linux线程库
其实,C++也可以写多线程代码:
#include<iostream>
#include<thread>
#include<unistd.h>
using namespace std;
void start_routine()
{
cout<<"我是新线程"<<endl;
sleep(1);
}
int main()
{
std::thread t1(start_routine);
while(1)
{
cout<<"我是主线程"<<endl;
sleep(1);
}
t1.join();
return 0;
}但是,在编译时必须指明要链接pthread库。
任何语言在Linux下使用多线程,必须使用pthread库。
c++的多线程,在Linux下,本质是对pthread库的封装。
我们遗留的问题,现在有必要搞清楚了。
我们已经确认每一个线程都有自己的独立栈结构,这个栈结构在哪里?
我们每创建一个线程,都会有一个线程的Id,这个Id看起来是个地址,究竟是什么地址?
原生线程库中有可能会存在很多的线程,要不要对这些进行有效的管理?要,管理的方式就是先描述,再组织。相对于进程的属性,线程的属性就显得非常少,因为在进程的PCB中,有一部分属性就是线程的属性。
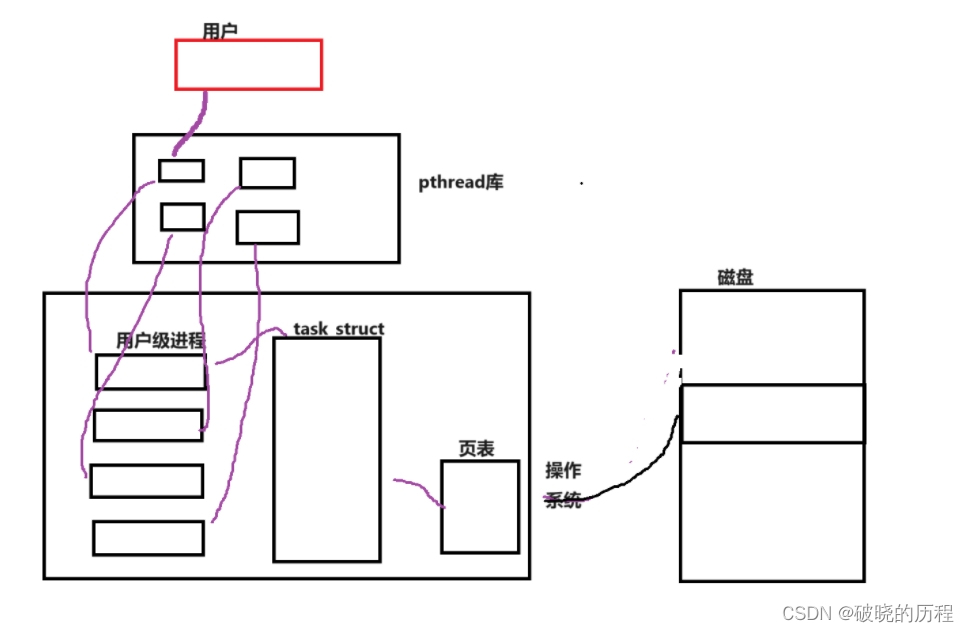
如图,用户每在用户层面创建一个线程,就会在pthread库中创建一个属性集数据结构,该属性集指向操作系统内的一个用户级进程。
在该属性集中一定包括线程独立栈的地址,LWP值等等。
Linux方案:用户级进程,用户关心的线程属性在库中,内核(操作系统)负责提供操作系统执行流的调度。
Linux用户级线程:轻量级进程=1:1;
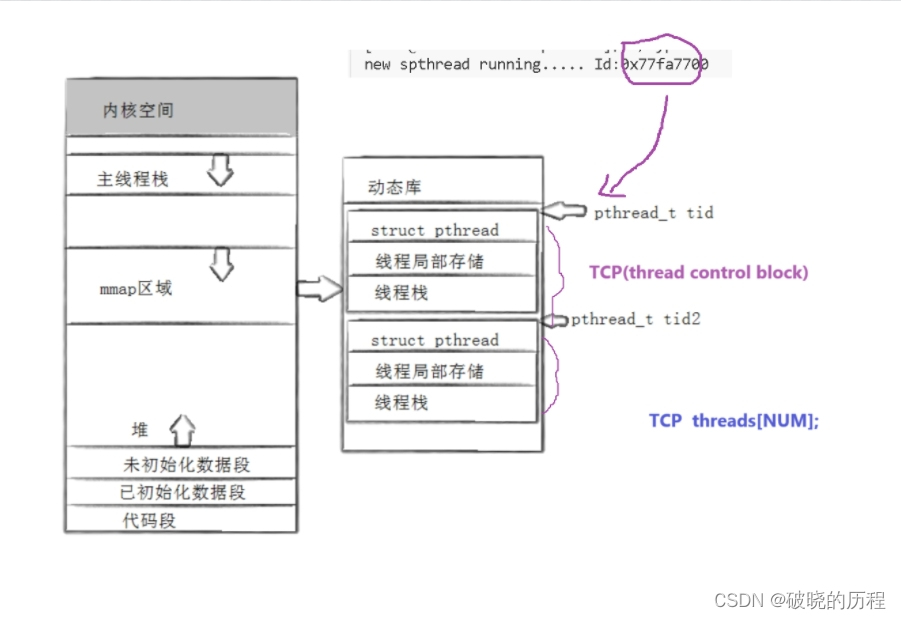
用户级线程库可以当作磁盘中的一个文件(也就是一个动态库)。该线程库经过映射,可以通过mmap区域找到这个动态库。一个进程的所有线程的属性集(就是TCB结构体)都会被保存在这里。 我们可以想象成一个数组。但是我们不是通过下标查找。我们创建线程返回的地址,就是对应线程的TCP在此处的起始地址,通过这个地址就可以找到这个线程私有的栈结构。
那创建一个线程,pthread库应该帮我们做哪个工作呢?
帮我们在pthread库中创建线程控制块(TCB)。然后返回TCB的起始地址,便于用户对线程进行操作。属于新线程私有的数据都会存储在线程私有栈中,主线程的数据则存储在共享区中。
🚀线程的局部存储。
废话不说,上码:
#include <pthread.h>
#include <iostream>
#include <unistd.h>
#include <cassert>
#include <vector>
#include <string>
#include <cstring>
using namespace std;
int g_val = 100;
void *start_routine(void *args)
{
while (1)
{
cout << "new pthread running..... g_val: " << g_val << " &g_val " << &g_val << endl;
sleep(1);
g_val++;
}
}
int main()
{
pthread_t id;
int n = pthread_create(&id, nullptr, start_routine, (void *)"thread noe");
assert(n == 0);
(void)n;
while (1)
{
cout << "main pthread running..... g_val: " << g_val << " &g_val " << &g_val << endl;
sleep(1);
}
pthread_join(id,nullptr);
return 0;
}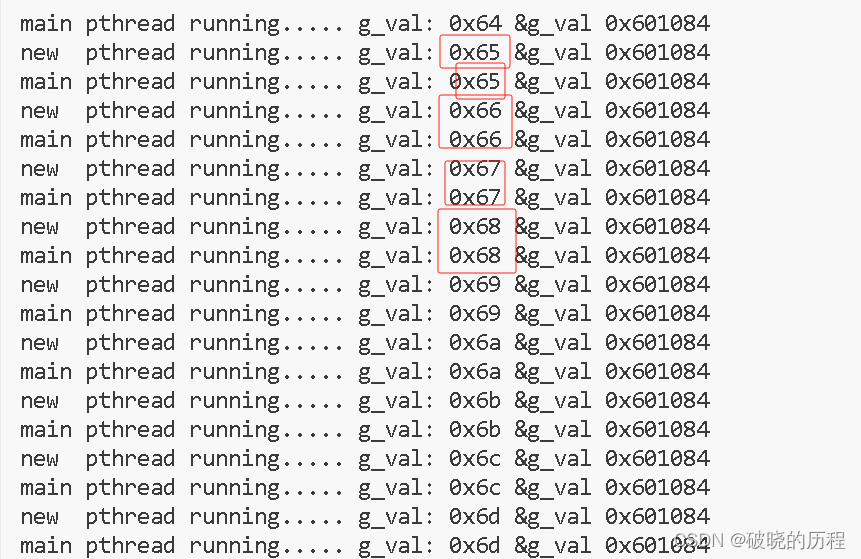
全局变量被所有进程所共享,所以新线程对数据进行修改后,主线程立刻就可以读取。
接着,我们做部分代码修改
__thread int g_val = 100;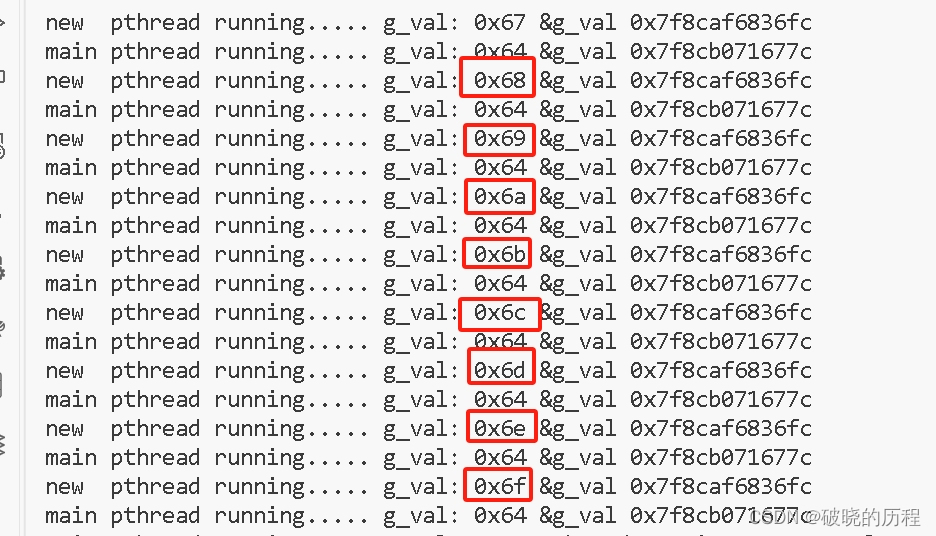
我们发现,新线程对数据进行修改,但主线程读取的数据并未改变,并且地址读取的地址也不同。
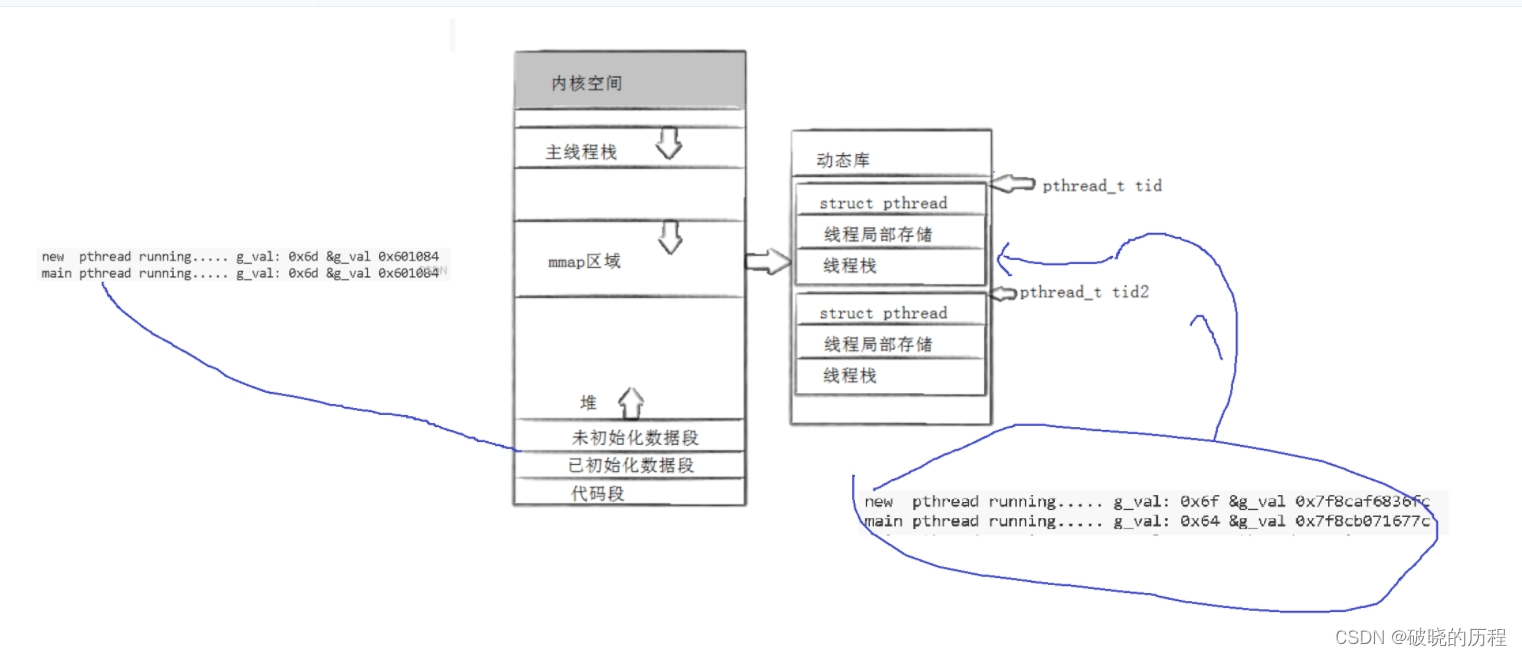
对比,我们发现,前后地址差别好大。这就是__thread的作用了。
__thread的作用是什么?
在一个全局变量前加__thread,可以将一个内置类型设置为线程局部存储(就本例子而言,未添加前,数据存储在已初始化数据段;添加后,在运行时,会将数据给每个线程都拷贝一份,存储在自己的栈中,线程之间数据修改彼此互不影响。
由于存储的地址空间发生改变,空间中越往上地址越大,所以我们读取的地址理所当然的变大了。
🚩对Linux线程简单的封装
代码如下:
#pragma once
#include <iostream>
#include <string>
#include <cstring>
#include <cassert>
#include <functional>
#include <pthread.h>
// header only 开源代码
class Thread;
//上下文,当成一个大号的结构体
class Context
{
public:
Thread *this_;
void *args_;
public:
Context():this_(nullptr), args_(nullptr)
{}
~Context()
{}
};
class Thread
{
public:
// using func_t = std::function<void*(void*)>;
typedef std::function<void*(void*)> func_t;
const int num = 1024;
public:
Thread(func_t func, void *args = nullptr, int number = 0): func_(func), args_(args)
{
// name_ = "thread-";
// name_ += std::to_string(number);
char buffer[num];
snprintf(buffer, sizeof buffer, "thread-%d", number);
name_ = buffer;
// 异常 == if: 意料之外用异常或者if判断
// assert: 意料之中用assert
Context *ctx = new Context();
ctx->this_ = this;
ctx->args_ = args_;
int n = pthread_create(&tid_, nullptr, start_routine, ctx); //TODO
assert(n == 0); //编译debug的方式发布的时候存在,release方式发布,assert就不存在了,n就是一个定义了,但是没有被使用的变量
// 在有些编译器下会有warning
(void)n;
}
// 在类内创建线程,想让线程执行对应的方法,需要将方法设置成为static
static void *start_routine(void *args) //类内成员,有缺省参数!
{
Context *ctx = static_cast<Context *>(args);
void *ret = ctx->this_->run(ctx->args_);
delete ctx;
return ret;
// 静态方法不能调用成员方法或者成员变量
}
void join()
{
int n = pthread_join(tid_, nullptr);
assert(n == 0);
(void)n;
}
void *run(void *args)
{
return func_(args);
}
~Thread()
{
//do nothing
}
private:
std::string name_;
func_t func_;
void *args_;
pthread_t tid_;
};到这里,本篇内容就结束了,我们下期内容,再见!!。