paper:Pay Attention to MLPs
third-party implementation:https://github.com/huggingface/pytorch-image-models/blob/main/timm/models/mlp_mixer.py
方法介绍
gMLP和MLP-Mixer以及ResMLP都是基于MLP的网络结构,非常简单,关于MLP-Mixer和ResMLP的介绍见MLP-Mixer(NeurIPS 2021, Google)论文与源码解读-CSDN博客、ResMLP(NeurIPS 2021,Meta)论文与代码解析-CSDN博客。

在MLP-Mixer中每个block包含两个MLP,每个MLP包含两个线性层(即全连接层),一个MLP用于token间的信息交互,另一个MLP用于通道间的信息交互,每个MLP都用了residual connection,标准化采用LayerNorm。而在ResMLP中,第一个包含两个线性层的token MLP换成了单个线性层,此外在线性层前后包含两个标准化层pre-normalization和post-normalization,pre-normalization采用了简单的仿射变换,post-normalization采用了CaiT中的LayerScale。
gMLP的结构和伪代码如图1所示。可以看到gMLP将token_mlp(即这里的spatial gating unit)和channel_mlp放到了一起,只包含一个skip-connection,而不是像MLP-Mixer和ResMLP中每个mlp都采用一个skip-connection。此外block内的结构和MLP-Mixer以及ResMLP中的先token_mlp后channel_mlp不同,这里采用了channel+token+channel的形式。最后作者专门为token_mlp设计了一个门控机制,将输入split开一分为二,一半经过spatial proj得到的输出再和另一半相乘得到最终输出。
以上就是gMLP和MLP-Mixer以及ResMLP不同之处,总共包括三点,整体结构也非常简单。下面就直接用代码来解释具体的实现细节。
代码解析
一个完整的block的代码如下,forward函数中可以看到只包含一个skip-connection,self.mlp_channels包含了图1中第一个Channel Proj到最后的Channel Proj。
class SpatialGatingBlock(nn.Module):
""" Residual Block w/ Spatial Gating
Based on: `Pay Attention to MLPs` - https://arxiv.org/abs/2105.08050
"""
def __init__(
self,
dim,
seq_len,
mlp_ratio=4,
mlp_layer=GatedMlp,
norm_layer=partial(nn.LayerNorm, eps=1e-6),
act_layer=nn.GELU,
drop=0.,
drop_path=0.,
):
super().__init__()
channel_dim = int(dim * mlp_ratio) # 512x6=3072
self.norm = norm_layer(dim)
sgu = partial(SpatialGatingUnit, seq_len=seq_len) # 196
self.mlp_channels = mlp_layer(dim, channel_dim, act_layer=act_layer, gate_layer=sgu, drop=drop)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
def forward(self, x): # (1,196,512)
x = x + self.drop_path(self.mlp_channels(self.norm(x)))
return x上面的mlp_layer的代码如下,self.fc1和self.fc2对应两个Channel Proj。
class GatedMlp(nn.Module):
""" MLP as used in gMLP
"""
def __init__(
self,
in_features,
hidden_features=None,
out_features=None,
act_layer=nn.GELU,
norm_layer=None,
gate_layer=None,
bias=True,
drop=0.,
):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
bias = to_2tuple(bias)
drop_probs = to_2tuple(drop)
self.fc1 = nn.Linear(in_features, hidden_features, bias=bias[0])
self.act = act_layer()
self.drop1 = nn.Dropout(drop_probs[0])
if gate_layer is not None:
assert hidden_features % 2 == 0
self.gate = gate_layer(hidden_features)
hidden_features = hidden_features // 2 # FIXME base reduction on gate property?
else:
self.gate = nn.Identity()
self.norm = norm_layer(hidden_features) if norm_layer is not None else nn.Identity()
self.fc2 = nn.Linear(hidden_features, out_features, bias=bias[1])
self.drop2 = nn.Dropout(drop_probs[1])
def forward(self, x): # (1,196,512)
# Linear(in_features=512, out_features=3072, bias=True)
x = self.fc1(x) # (1,196,3072)
x = self.act(x)
x = self.drop1(x)
x = self.gate(x) # (1,196,1536)
x = self.norm(x)
# Linear(in_features=1536, out_features=512, bias=True)
x = self.fc2(x) # (1,196,512)
x = self.drop2(x)
return xgate_layer的代码如下,其中x.chunk(2, dim=-1)表示将x沿最后一个维度均分为2份。
class SpatialGatingUnit(nn.Module):
""" Spatial Gating Unit
Based on: `Pay Attention to MLPs` - https://arxiv.org/abs/2105.08050
"""
def __init__(self, dim, seq_len, norm_layer=nn.LayerNorm):
super().__init__()
gate_dim = dim // 2
self.norm = norm_layer(gate_dim)
self.proj = nn.Linear(seq_len, seq_len) # 196,196
def init_weights(self):
# special init for the projection gate, called as override by base model init
nn.init.normal_(self.proj.weight, std=1e-6)
nn.init.ones_(self.proj.bias)
def forward(self, x): # (1,196,3072)
u, v = x.chunk(2, dim=-1) # (1,196,1536),(1,196,1536)
v = self.norm(v)
v = self.proj(v.transpose(-1, -2)) # (1,1536,196)
return u * v.transpose(-1, -2) # (1,196,1536) * (1,196,1536)实验结果
作者设计了三个不同大小的gMLP,具体参数配置如下

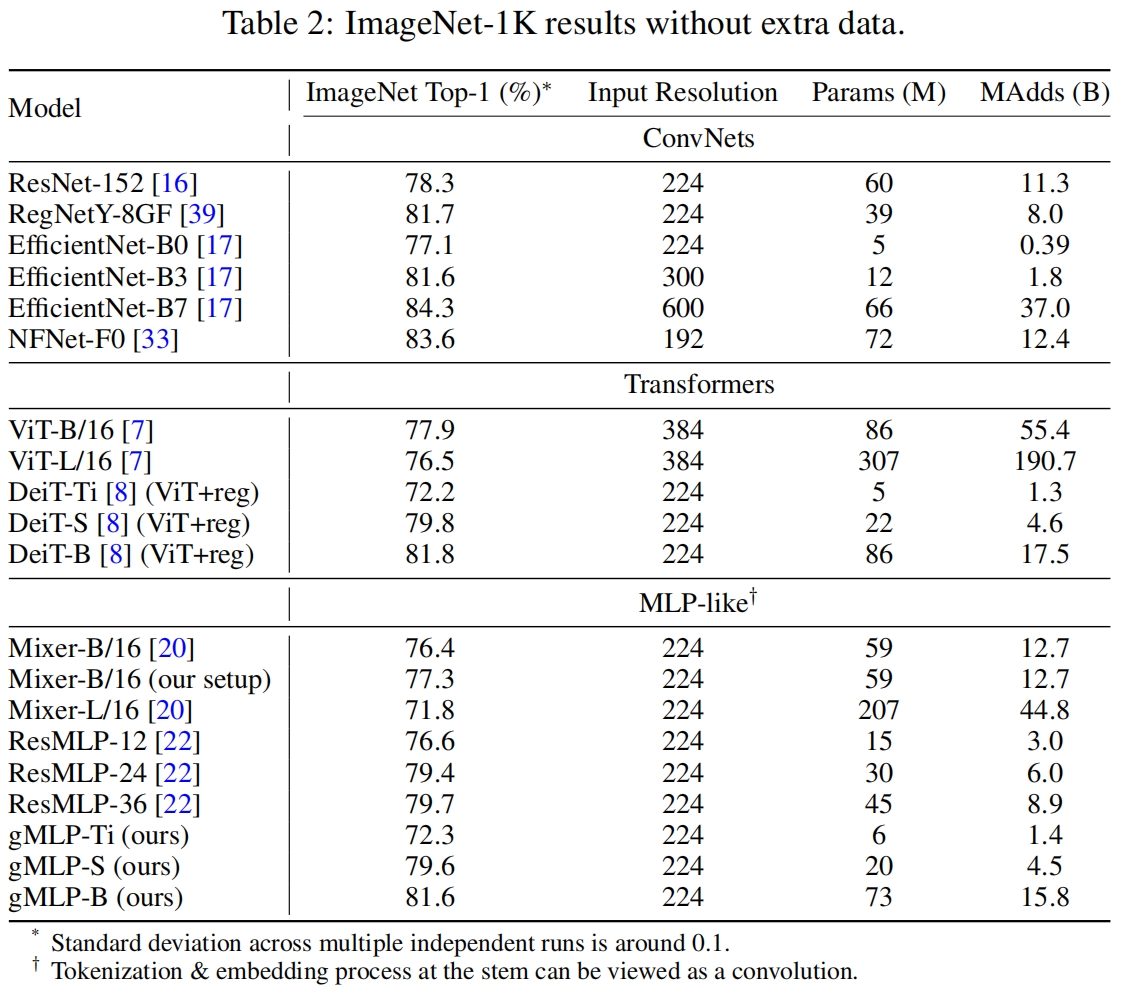
和其它模型在ImageNet上的分类性能对比如下,可以看到和类似大小的MLP-Mixer与ResMLP相比,gMLP用更少的参数得到了更好的性能。
![[深度学习] 生成对抗网络GAN](https://img-blog.csdnimg.cn/direct/3a082ec2790b47258a884a1281515f1a.png)