本篇摘要
在上一篇中我们对寻路的移动规则进行了制定,而在本篇我们将对最佳路径的查找方式进行优化,而这就会涉及到移动规则的检测改进、权值计算的改进、NextNode集的处理改进、寻路逻辑的改进,我们将从上述四个方面进行详细讲解。
方案探讨
(一)移动规则的检测改进:可移动检测、可替换斜向移动检测、可替换二次非斜向移动检测、方向Node集检测。
(1)可移动检测:检测当前Node的NextNode集中是否存在可以移动的下一步Node,这个基本的检测用于判断下一步是否可行。
(2)可替换斜向移动检测:检测是否存在一次斜向移动可替换两次非斜向移动的情况,如果存在,则进行替换,两次非斜向移动的权值高于一次斜向移动的权值,所以通过这个方式来优化最佳路径查找方式。
(3)可替换二次非斜向移动检测:检测是否存在二次斜向移动可替换为二次非斜向移动,如果存在,则进行替换,一次斜向移动的权值高于一次非斜向移动的权值,所以通过这个方式来优化最佳路径查找方式。
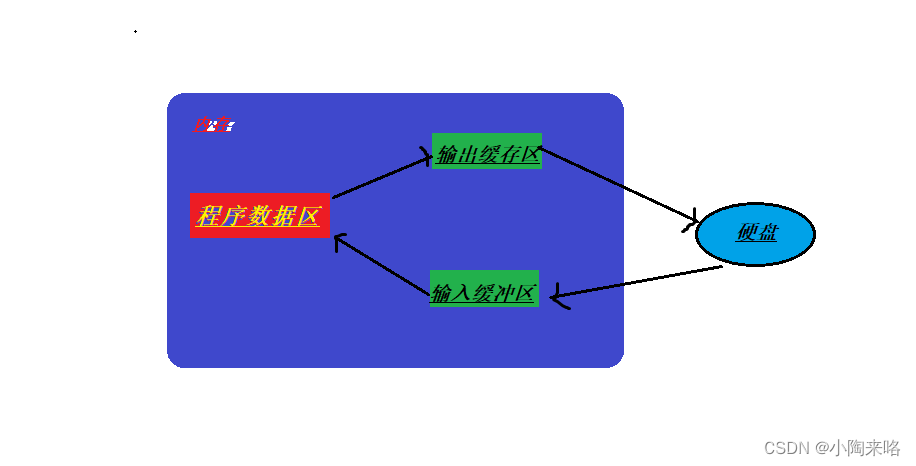
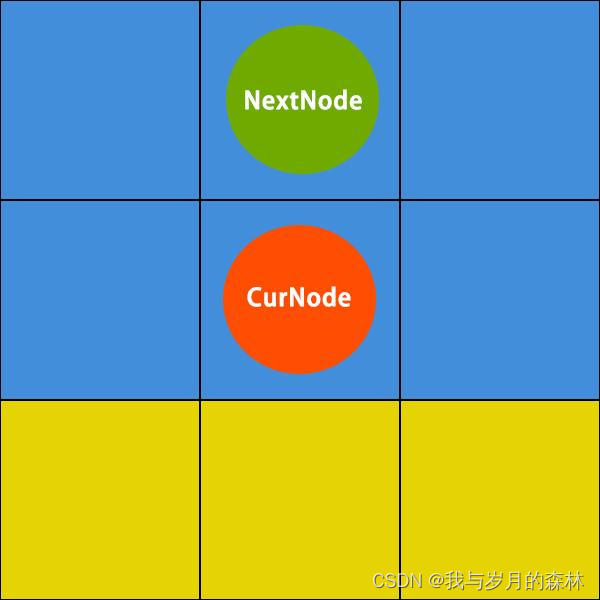
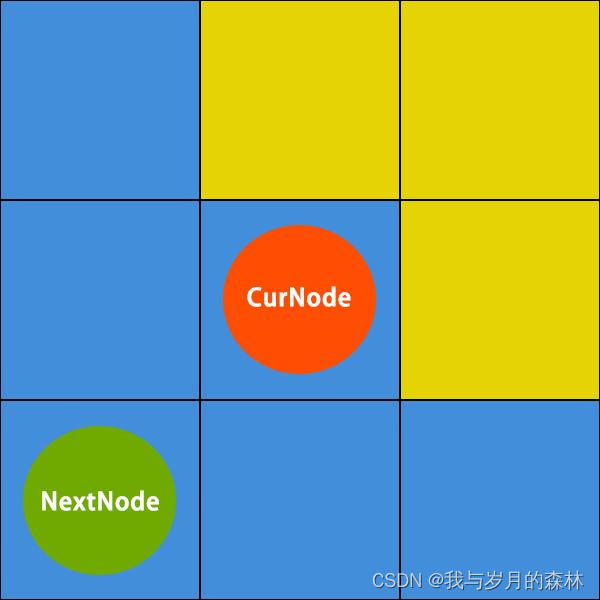
(4)方向Node集检测:检测当前Node的NextNode集中是否存在上一步Node至当前Node的方向Node集元素,如果存在则进行剔除,如下四图,CurNode(橙色圆)当前当前Node,NextNode(绿色圆)代表下一步Node,方向Node集为图中黄色方块,这就相似于A星算法中的OpenList,但是不同的是,OpenList是将上一步Node的NextNode集中所有元素进行添加,而方向Node集仅添加与前进方向相反方向的三个Node。


(二)权值计算的改进:G和H值的计算改进
(1)G值计算改进:
●1.设StartNode(v_staX,v_staY),CurNode(v_curX,v_curY)
●2.计算:
●●2.1满足abs(v_curX - v_staX) != abs(v_curY - v_staY)
v_g=abs(v_curX-v_staX)*nonDiagonalCost+abs(v_curY-v_staY)*nonDiagonalCost
●●2.2满足 abs(v_curX - v_staX) == abs(v_curY -v_staY)
v_g=abs(v_curX-v_staX)*diagonalCost
(2)H值计算改进
●1.设EndNode(v_endX,v_endY),CurNode(v_curX,v_curY),行数为rowsCount,列数为colsCount,则横坐标范围为[0.5,(colsCount-1)+0.5],纵坐标范围为[0.5,(rowsCount-1)+0.5],nonDiagonalCost为一次非斜向移动权值,diagonalCost为一次斜向移动权值,v_minCount代表rowsCount和colsCount二者之间最小的一个,若rowsCount<colsCount则v_minCount=rowsCount,否则v_minCount=colsCount。
●2.计算:
●●2.1满足v_curX == v_endX
v_h=abs(v_endX-v_curX)*nonDiagonalCost
●●2.2满足v_curY == v_endY
v_h=abs(v_endY-v_curY)*nonDiagonalCost
●●2.3满足 abs(v_curX - v_endX) == abs(v_curY -v_endY)
v_h = abs(v_curX - v_endX)*diagonalCost
●●2.4满足 v_curY > v_endY
●●●2.4.1 令v_x = v_endX - i,v_y = v_endY + i,i为区间[1,rowsCount-0.5-v_endY]内的整数
●●●●2.4.1.1满足 i <= v_endX - 0.5
●●●●●2.4.1.1.1 满足abs(v_curX - v_x) == abs(v_curY- v_y)
●●●●●●2.4.1.1.1.1令v_xA = v_x - j,v_yA = v_y – j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.4.1.1.1.1.1满足v_xA >= 0.5 and v_yA >v_endY
v_h = (j + i)*diagonalCost
●●●●●●2.4.1.1.1.2令v_xB = v_x + j,v_yB = v_y + j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.4.1.1.1.2.1满足v_xB < v_endX and v_yB<= v_rowsCount - 0.5
v_h = (j + i)*diagonalCost
●●●●●2.4.1.1.2满足v_curY == v_y
●●●●●●2.4.1.1.2.1满足v_curX <= v_x
v_h = abs(v_x - v_curX)*nonDiagonalCost + i*diagonalCost
●●●●●●2.4.1.1.2.2满足v_curX > v_x
v_h = (abs(v_endX - v_curX) + abs(v_curY - v_endY))*nonDiagonalCost
●●●●●2.4.1.1.3满足v_curX == v_x
v_h = abs(v_y - v_curY)*nonDiagonalCost + i*diagonalCost
●●●2.4.2 令v_x = v_endX + i,v_y = v_endY + i,i为区间[1,rowsCount-0.5-v_endY]内的整数
●●●●2.4.2.1满足i <= v_colsCount - 0.5 - v_endX
●●●●●2.4.2.1.1满足abs(v_curX - v_x) == abs(v_curY -v_y)
●●●●●●2.4.2.1.1.1令v_xA = v_x + j,v_yA = v_y – j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.4.2.1.1.1.1满足v_xA <= v_colsCount - 0.5and v_yA > v_endY
v_h = (j + i)*diagonalCost
●●●●●●2.4.2.1.1.2令v_xB = v_x - j,v_yB = v_y + j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.4.2.1.1.2.1满足v_xB > v_endX and v_yB<= v_rowsCount - 0.5
v_h = (j + i)*diagonalCost
●●●●●2.4.2.1.2满足v_curY == v_y
●●●●●●2.4.2.1.2.1满足v_curX >= v_x
v_h=abs(v_curX-v_x)*nonDiagonalCost+i*diagonalCost
●●●●●●2.4.2.1.2.2满足v_curX < v_x
v_h=(abs(v_curX-v_endX)+abs(v_curY-v_endY))*nonDiagonalCost
●●●●●2.4.2.1.3满足v_curX == v_x
v_h=abs(v_y-v_curY)*nonDiagonalCost+i*diagonalCost
●●2.5满足v_curY < v_endY
●●●2.5.1令v_x = v_endX - i,v_y = v_endY – i,i为区间[1,v_endY-0.5]内的整数
●●●●2.5.1.1满足i <= v_endX - 0.5
●●●●●2.5.1.1.1满足abs(v_curX - v_x) == abs(v_curY -v_y)
●●●●●●2.5.1.1.1.1令v_xA = v_x + j,v_yA = v_y – j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.5.1.1.1.1.1满足v_xA < v_endX and v_yA>= 0.5
v_h = (j + i)*diagonalCost
●●●●●●2.5.1.1.1.2令v_xB = v_x - j,v_yB = v_y + j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.5.1.1.1.2.1满足v_xB >= 0.5 and v_yB <v_endY
v_h = (j + i)*diagonalCost
●●●●●2.5.1.1.2满足v_curY == v_y
●●●●●●2.5.1.1.2.1满足v_curX <= v_x
v_h=abs(v_x-v_curX)*nonDiagonalCost+i*diagonalCost
●●●●●●2.5.1.1.2.2满足v_curX > v_x
v_h=(abs(v_endX-v_curX)+abs(v_endY-v_curY))*nonDiagonalCost
●●●●●2.5.1.1.3满足v_curX == v_x
v_h=abs(v_y-v_curY)*nonDiagonalCost+i*diagonalCost
●●●2.5.2令v_x = v_endX + i,v_y = v_endY – i,i为区间[1,v_endY-0.5]内的整数
●●●●2.5.2.1满足i <= v_colsCount - 0.5 - v_endX
●●●●●2.5.2.1.1满足abs(v_curX - v_x) == abs(v_curY -v_y)
●●●●●●2.5.2.1.1.1令v_xA = v_x - j,v_yA = v_y – j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.5.2.1.1.1.1满足v_xA > v_endX and v_yA>= 0.5
v_h = (j + i)*diagonalCost
●●●●●●2.5.2.1.1.2令v_xB = v_x + j,v_yB = v_y + j,j为区间[1,v_minCount - 1]内的整数
●●●●●●●2.5.2.1.1.2.1满足v_xB <= v_colsCount - 0.5and v_yB < v_endY
v_h = (j + i)*diagonalCost
●●●●●2.5.2.1.2满足v_curY == v_y
●●●●●●2.5.2.1.2.1满足v_curX >= v_x
v_h=abs(v_curX-v_x)*nonDiagonalCost+i*diagonalCost
●●●●●●2.5.2.1.2.2满足v_curX < v_x
v_h=(abs(v_curX-v_endX)+abs(v_endY-v_curY))*nonDiagonalCost
●●●●●2.5.2.1.3满足v_curX == v_x
v_h=abs(v_y-v_curY)*nonDiagonalCost+i*diagonalCost
●●2.6开始之前记得检测v_x和v_y是否超出有效范围,例如当终点Node位于网格最左边时,那么对于v_x=v_endX - i的情况均超出网格有效范围,则直接进行排除,需要检测的情况通常是终点Node处于网格边界上,反之则不需要有效范围检测。
(三)NextNode集的处理改进:NextNode集生成、超出网格范围检测、特殊Node集元素包含检测、NextNode集权值计算、NextNode集排序
(1)NextNode集生成:生成当前Node的下一步Node集
(2)超出网格范围检测:将生成的NextNode集中超出网格范围的Node进行剔除
(3)特殊Node集元素包含检测:将NextNode集中属于CloseList、BlockNode集、CheckedList的元素进行剔除
(4)NextNode集权值计算:对NextNode集中的Node进行权值计算
(5)NextNode集排序:对NextNode集中的Node按照权值小的在表头,从小到大进行排序
(四)寻路逻辑的改进:
(1)更新当前Node
(2)获取当前Node的NextNode集
(3)对NextNode集进行移动检测
(4)使用NextNode集
(5)重复(1)、(2)、(3)、(4)过程,直至到达终点,若出现无法到达终点的情况,则对最后一步Node进行上锁,上锁即代表到达终点前将无法使用该Node,然后重置相关参数,重新查找路径,直至找到一条可到达终点的路径。
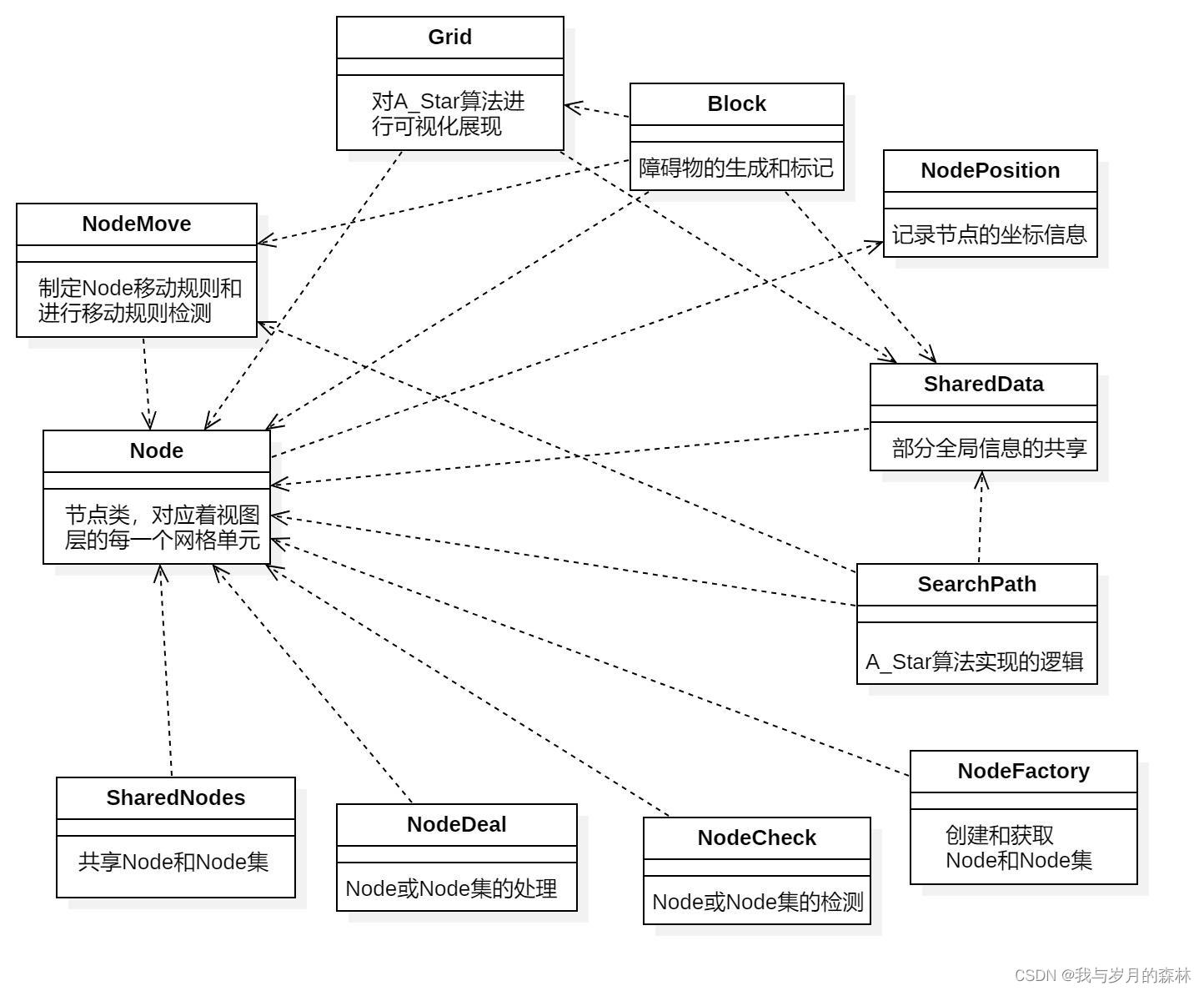
示例代码UML图
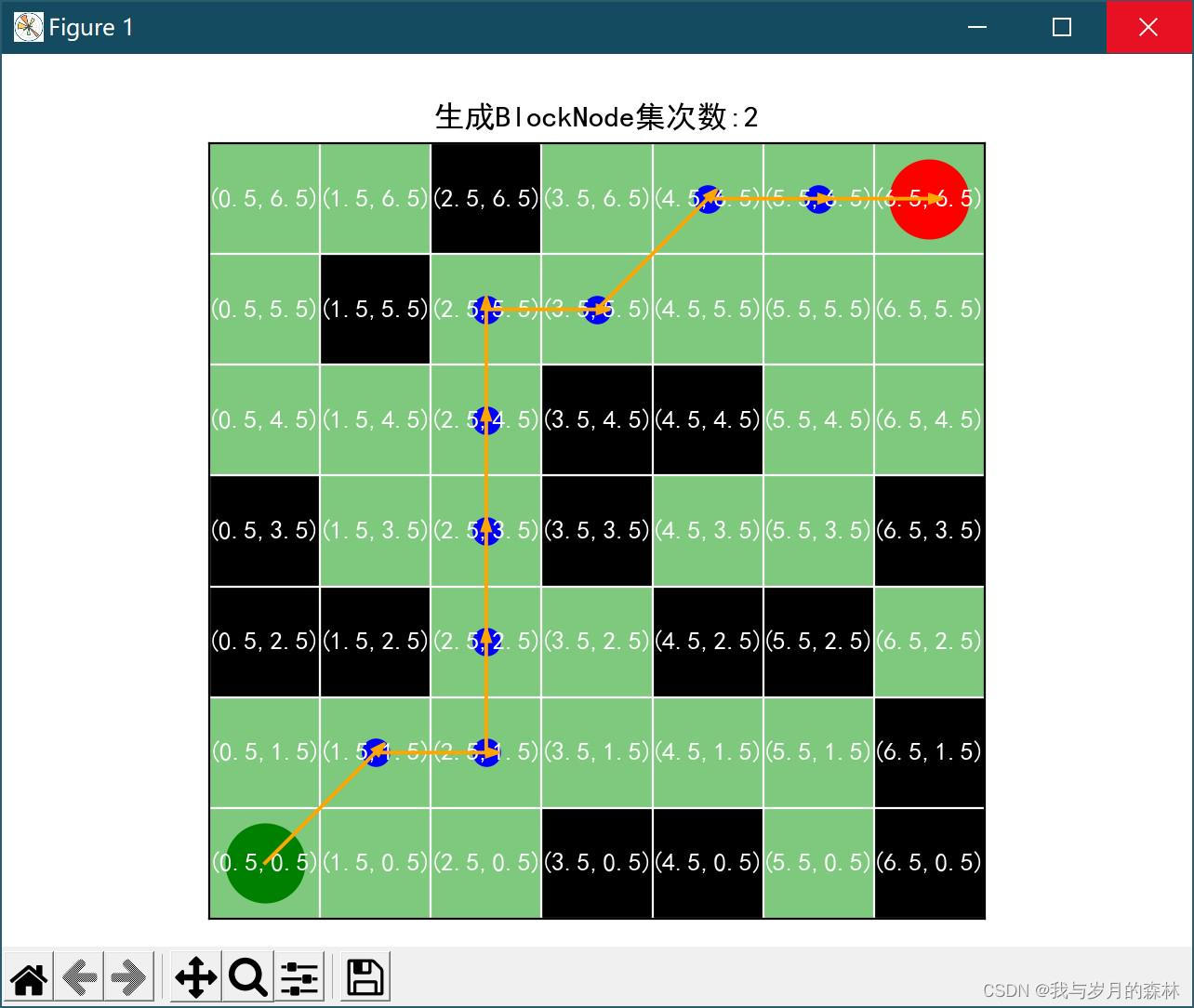
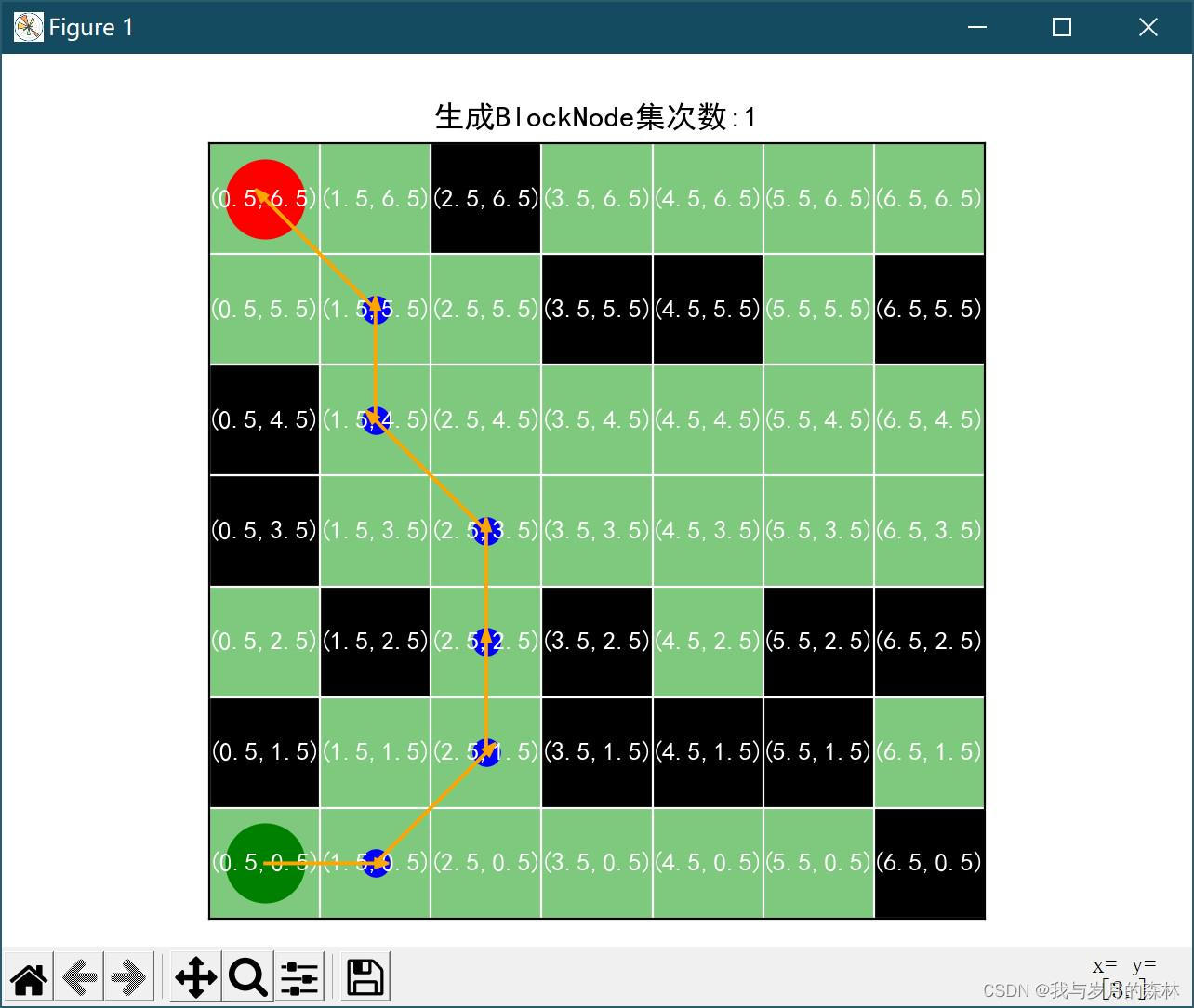
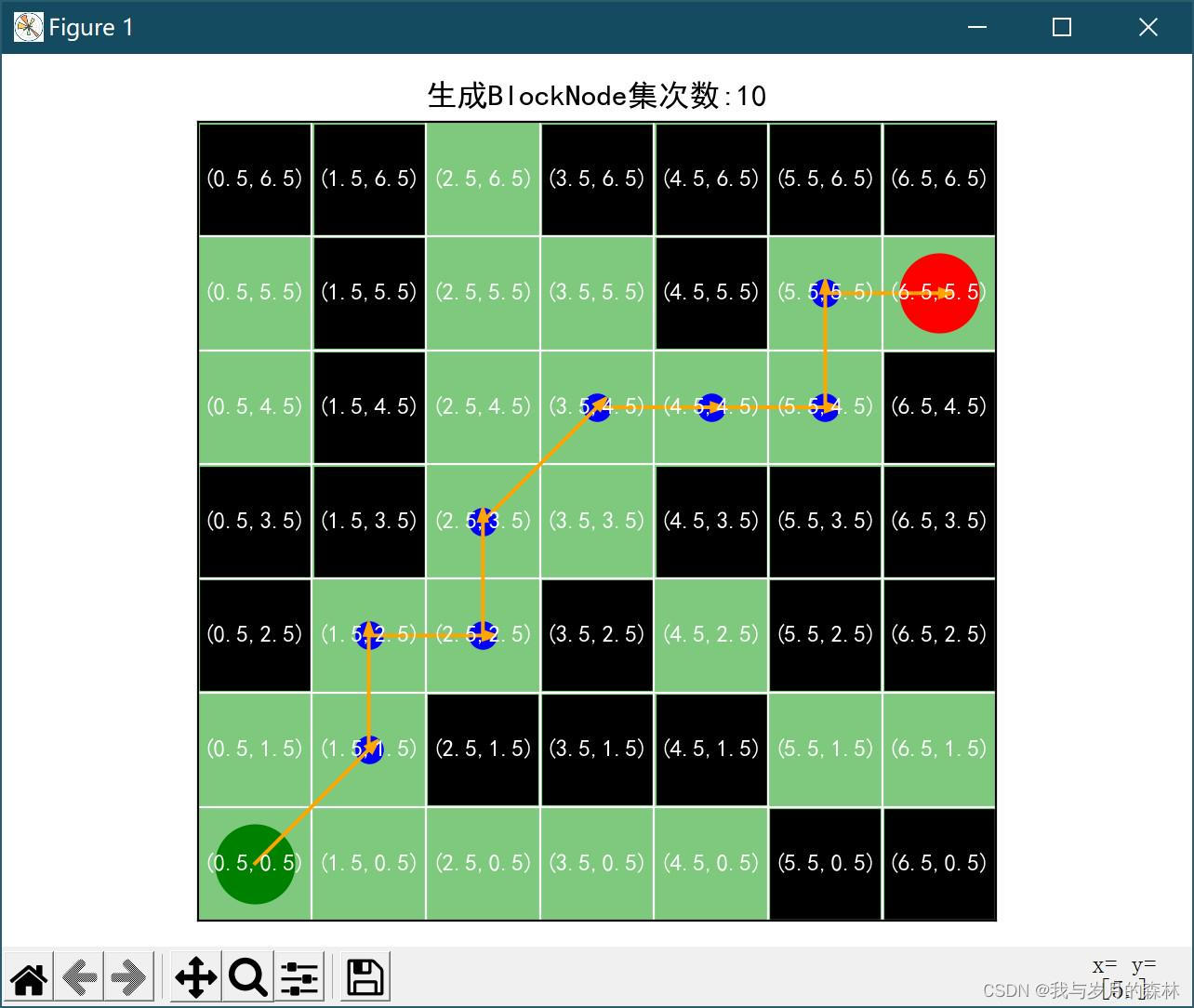
效果截图
代码示例(Python)
Grid.py
import matplotlib.pyplot as pp
import numpy as np
from myCodes import SharedData as sd
from myCodes import Node as node
# 视图的构建和绘制
class Grid:
# 横纵坐标轴的刻度标记
_xLabels = []
_yLabels = []
# 网格单元格的信息
_data = None
# 是否完成初始化
_isInit = False
def __init__(self, p_rowsCount, p_colsCount, p_sizes: tuple = ()):
if self._isInit is False:
# 网格的行列数
if 3 <= p_rowsCount <= 7:
self._rowsCount = p_rowsCount
elif p_rowsCount < 3:
self._rowsCount = 3
else:
self._rowsCount = 7
if 3 <= p_colsCount <= 7:
self._colsCount = p_colsCount
elif p_colsCount < 3:
self._colsCount = 3
else:
self._colsCount = 7
# 将网格的行列数设置为共享信息
sd.SharedData.rowsCount = self._rowsCount
sd.SharedData.colsCount = self._colsCount
# 将各类尺寸大小设置为共享信息
v_sizes = p_sizes
if len(p_sizes) == 0:
v_sizes = sd.SharedData.GetSizes(self._rowsCount, self._colsCount)
for i in range(len(v_sizes)):
if i == 0:
sd.SharedData.startNodeSize = v_sizes[0]
elif i == 1:
sd.SharedData.endNodeSize = v_sizes[1]
elif i == 2:
sd.SharedData.blockNodeSize = v_sizes[2]
elif i == 3:
sd.SharedData.pathNodeSize = v_sizes[3]
elif i == 4:
sd.SharedData.arrowWidth = v_sizes[4]
elif i == 5:
sd.SharedData.fontSize = v_sizes[5]
self._isInit = True
def Draw(self):
"""
绘制图形
"""
pp.rcParams['font.sans-serif'] = ['SimHei']
pp.title(sd.SharedData.blockInfo)
# 获取坐标轴实例
v_ax = pp.gca()
self._AxisSet(v_ax)
self._GridValueSet(v_ax)
# 将数据以二维图片的形式进行显示
v_ax.imshow(self._data, cmap='Accent', aspect='equal', vmin=0, vmax=255)
# 标记起始点和终点
self.Mark(sd.SharedNodes().GetStartNode(), sd.SharedData.startNodeSize, 'go')
self._PathNodeSet()
self.Mark(sd.SharedNodes().GetEndNode(), sd.SharedData.endNodeSize, 'ro')
# 布置网格线
pp.grid(visible=True, color='w')
pp.tight_layout(pad=1)
pp.show()
# 标记所查找到的路径
def _PathNodeSet(self):
v_pathNodes = sd.SharedNodes().GetPathNodes()
v_length = len(v_pathNodes)
for i in range(v_length):
if 0 < i < v_length - 1:
self.Mark(v_pathNodes[i], sd.SharedData.pathNodeSize, 'bo')
self._Arrow(v_pathNodes[i - 1], v_pathNodes[i])
elif i == v_length - 1:
self._Arrow(v_pathNodes[i - 1], v_pathNodes[i])
@classmethod
def Mark(cls, p_node: node.Node, p_marksize: int, p_fmt: str):
"""
用于在图象上标记Node
:param p_node: 表示待标记的Node
:param p_marksize: 表示标记的尺寸大小
:param p_fmt: 表示标记颜色和图形的样式描述
"""
v_x = p_node.nodePos.x
v_y = p_node.nodePos.y
pp.plot(v_x, v_y, p_fmt, markersize=p_marksize, zorder=1)
# 箭头指向方法
def _Arrow(self, p_firstNode, p_secondNode):
v_dx = p_secondNode.nodePos.x - p_firstNode.nodePos.x
v_dy = p_secondNode.nodePos.y - p_firstNode.nodePos.y
pp.arrow(p_firstNode.nodePos.x, p_firstNode.nodePos.y, v_dx, v_dy, color='orange',
width=sd.SharedData.arrowWidth, head_width=0.08,
zorder=3)
# 坐标轴设置
def _AxisSet(self, p_ax):
v_ax = p_ax
for i in range(0, self._colsCount + 1):
self._xLabels.append(str(i))
for i in range(0, self._rowsCount + 1):
self._yLabels.append(str(i))
# 隐藏刻度线
v_ax.tick_params(left=False, bottom=False, top=False, right=False)
# 生成Image Data
v_low = 1
if self._rowsCount > self._colsCount:
v_high = self._rowsCount
else:
v_high = self._colsCount
self._data = np.random.randint(v_low, v_high, size=(self._rowsCount + 1, self._colsCount + 1))
# # 设置横纵坐标轴的范围
pp.xlim(0, self._colsCount)
pp.ylim(0, self._rowsCount)
# 设置坐标轴的刻度标记
v_ax.set_xticks(np.arange(self._colsCount + 1), labels=self._xLabels, visible=False)
v_ax.set_yticks(np.arange(self._rowsCount + 1), labels=self._yLabels, visible=False)
# 设置坐标轴的横纵轴比例相等
v_ax.set_aspect('equal')
# 网格内容设置
def _GridValueSet(self, p_ax):
v_ax = p_ax
for i in range(self._colsCount):
for j in range(self._rowsCount):
v_str = '(' + str(i + 0.5) + ',' + str(j + 0.5) + ')'
v_ax.text(i + 0.5, j + 0.5, v_str, ha='center', va='center', color='w', fontsize=sd.SharedData.fontSize,
zorder=4)Node.py
import random
from enum import Enum, unique
from myCodes import SharedData as sd
import threading as th
# Node坐标类
class NodePosition:
def __init__(self, p_x: float = 1, p_y: float = 1):
"""
Node坐标信息初始化
:param p_x: 横坐标值
:param p_y: 纵坐标值
"""
self.x = p_x
self.y = p_y
def __str__(self):
return '[' + str(self.x) + ',' + str(self.y) + ']'
# Node标签
@unique
class NodeTag(Enum):
PATHNODE = 1
BLOCKNODE = 2
# Node类
class Node:
def __init__(self, p_nodeName: str, p_nodePos: NodePosition):
"""
Node初始化
:param p_nodeName: Node名称
:param p_nodePos: Node的坐标信息
"""
self.nodeName = p_nodeName
self.nodePos = p_nodePos
# f=g+h,g代表从上一个点到该点的代价和,h代表从该点到终点的代价和,f代表总权值weight
self.f: int = 0
self.g: int = 0
self.h: int = 0
# Node的标签,用于判断是否为不可到达的Node,
self.nodeTag = NodeTag.PATHNODE
# 前驱Node
self.preNode = None
# 后继Node
self.nextNode = None
def SetWeight(self, p_f: int, p_g: int, p_h: int):
"""
设置Node的权值
:param p_f: 代表总权值weight, f = g + h
:param p_g: 代表从上一个点到该点的代价和
:param p_h: 代表从该点到终点的代价和
:return: 无返回值
"""
self.f = p_f
self.g = p_g
self.h = p_h
def __str__(self):
return '{nodeName:' + self.nodeName + ',nodePos:' + str(
self.nodePos) + ',f=' + str(
self.f) + ',g=' + str(
self.g) + ',h=' + str(self.h) + '}'
def __eq__(self, other):
if other is not None and self.nodePos.x == other.nodePos.x and self.nodePos.y == other.nodePos.y:
return True
return False
# Node工厂,用来创建和获取起始点Node和终点Node
class NodeFactory:
_lock = th.Lock()
_isCreateEndNode = False
_isCreateStartNode = False
_startNode: Node
_endNode: Node
# Node名称索引
_nameIndex = 1
# GenerateOneNode的Node索引
_rowIndex = 1
_colIndex = 1
_generateCount = 0
def __init__(self):
if self._isCreateStartNode is False:
self._CreateStartNode()
sd.SharedNodes().SetStartNode(self._startNode, 'SNSET')
if self._isCreateEndNode is False:
self._CreateEndNode()
sd.SharedNodes().SetEndNode(self._endNode, 'ENSET')
def __new__(cls, *args, **kwargs):
if hasattr(NodeFactory, '_instance') is False:
with cls._lock:
if hasattr(NodeFactory, '_instance') is False:
NodeFactory._instance = object.__new__(cls)
return NodeFactory._instance
# 创建起始点Node
def _CreateStartNode(self):
v_nodePos = NodePosition(0.5, 0.5)
self._startNode = Node('StartNode', v_nodePos)
self._isCreateStartNode = True
# 创建终点Node
def _CreateEndNode(self):
v_startNode = self._startNode
v_node = v_startNode
while v_node == v_startNode:
v_node = self.GenerateOneNode('EndNode', p_isRandom=True)
self._endNode = v_node
self._isCreateEndNode = True
def GenerateXYNodes(self, p_x=0, p_y=0, p_isRefX=True, p_isDefCheck=True):
"""
生成横坐标或纵坐标为指定参考值的Node集
:param p_x: 横坐标参考值
:param p_y: 纵坐标参考值
:param p_isRefX: 是否以横坐标为参考坐标,默认为True,若为False则以纵坐标为参考坐标
:param p_isDefCheck: 是否开启默认检测,默认为True,会自动排除起始点Node和终点Node
:return: 返回一个列表
"""
v_list = []
v_index = 1
v_startNode = self._startNode
v_endNode = self._endNode
if p_isRefX:
while True:
v_node = self.GenerateOneNode('Node' + str(v_index))
if v_node is None:
break
else:
v_j1 = True
if p_isDefCheck:
v_j1 = v_node != v_startNode and v_node != v_endNode
if v_j1 and v_node.nodePos.x == p_x:
v_list.append(v_node)
v_index += 1
else:
while True:
v_node = self.GenerateOneNode('Node' + str(v_index))
if v_node is None:
break
else:
v_j1 = True
if p_isDefCheck:
v_j1 = v_node != v_startNode and v_node != v_endNode
if v_j1 and v_node.nodePos.y == p_y:
v_list.append(v_node)
v_index += 1
return v_list
def GenerateNodes(self, p_count, p_isRandom=False):
"""
生成指定数量的非重复Node集
:param p_count: 生成的Node的数量
:param p_isRandom: 是否随机生成,默认为False
:return: 返回一个列表
"""
v_list = []
v_index = 1
v_startNode = self._startNode
v_endNode = self._endNode
while len(v_list) < p_count:
v_node = self.GenerateOneNode('Node' + str(v_index), p_isRandom=p_isRandom)
if v_node is None:
break
else:
v_isRepeat = NodeCheck.RepeatCheck(v_list, v_node)
if v_isRepeat is False and v_node != v_startNode and v_node != v_endNode:
v_list.append(v_node)
v_index += 1
return v_list
def GenerateOneNode(self, p_name: str, p_isRandom=False):
"""
生成一个指定名称的Node
:param p_name: 生成的Node的名称
:param p_isRandom: 是否随机生成,默认为False,若为True则为非随机模式生成,将按照起始点从左至右&从下至上的顺序生成
:return: 默认会返回Node,在非随机生成模式下,当该方法生成完当前网格的所有Node后会进行重置并返回None,请保持对该方法的返回值是否为None的判断,避免陷入死循环
"""
v_rowsCount = sd.SharedData.rowsCount
v_colsCount = sd.SharedData.colsCount
v_x = 0.5
v_y = 0.5
if p_isRandom:
v_i = random.randint(0, v_colsCount - 1)
v_x = v_i + 0.5
v_i = random.randint(0, v_rowsCount - 1)
v_y = v_i + 0.5
else:
if self._colIndex < v_colsCount:
if self._rowIndex > v_rowsCount:
self._rowIndex -= v_rowsCount
self._colIndex += 1
v_x = (self._colIndex - 1) + 0.5
v_y = (self._rowIndex - 1) + 0.5
self._rowIndex += 1
self._generateCount += 1
else:
if self._rowIndex <= v_rowsCount:
v_x = (self._colIndex - 1) + 0.5
v_y = (self._rowIndex - 1) + 0.5
self._rowIndex += 1
self._generateCount += 1
else:
self._rowIndex = 1
self._colIndex = 1
if self._generateCount > v_rowsCount * v_colsCount:
self._generateCount = 0
return None
v_nodePos = NodePosition(v_x, v_y)
v_node = Node(p_name, v_nodePos)
return v_node
def GenerateNextNodes(self, p_node: Node):
"""
获取某个Node下一步可以前往的Node集(NextNode集)
:param p_node: 待生成NextNode集的Node
:return: 默认返回一个列表,若p_node为None则返回空列表
"""
v_list = []
if p_node is not None:
v_p = p_node.nodePos
v_posList = [(v_p.x - 1, v_p.y), (v_p.x - 1, v_p.y + 1), (v_p.x, v_p.y + 1), (v_p.x + 1, v_p.y + 1),
(v_p.x + 1, v_p.y), (v_p.x + 1, v_p.y - 1), (v_p.x, v_p.y - 1), (v_p.x - 1, v_p.y - 1)]
v_nameList = ['A', 'B', 'C', 'D', 'E', 'F', 'G', 'H']
for i in range(len(v_posList)):
v_nodeName = v_nameList[i] + str(self._nameIndex)
v_nodePos = NodePosition(v_posList[i][0], v_posList[i][1])
v_node = Node(v_nodeName, v_nodePos)
v_list.append(v_node)
self._nameIndex += 1
return v_list
# Node或Node集的检测
class NodeCheck:
@classmethod
def RepeatCheck(cls, p_list: list[Node], p_node: Node):
"""
判断Node集中是否存在某个Node
:param p_list: Node集
:param p_node: 待检测的Node
:return: 存在返回True,否则返回False
"""
if p_list is not None and len(p_list) != 0:
for n in p_list:
if n == p_node:
return True
return False
@classmethod
def OutOfRange(cls, p_node: Node):
"""
判断Node是否超出了网格限定范围
:param p_node: 待检测的Node
:return:若超出了范围则返回True,否则返回False
"""
v_minX = 0.5
v_minY = 0.5
v_maxX = (sd.SharedData.colsCount - 1) + 0.5
v_maxY = (sd.SharedData.rowsCount - 1) + 0.5
v_x = p_node.nodePos.x
v_y = p_node.nodePos.y
if v_minX <= v_x <= v_maxX and v_minY <= v_y <= v_maxY:
return False
return True
@classmethod
def IsContainNodes(cls, p_listA: list[Node], p_listB: list[Node]):
"""
判断某个Node集(p_listA)是否包含另一个Node集(p_listB)
:param p_listA: 待检测的Node集
:param p_listB: 被包含的Node集
:return: 若p_listA包含p_listB则返回True,否则返回False,若p_listA为None也会返回False
"""
if p_listA is not None and len(p_listA) != 0:
if p_listB is None or len(p_listB) == 0:
return True
else:
for n in p_listB:
if cls.RepeatCheck(p_listA, n) is False:
return False
return True
return False
@classmethod
def IsContainBestNodes(cls, p_list: list[Node]):
"""
检测NextNode集是否存在权值相等的最佳Node
:param p_list: 待检测的NextNode集
:return: 若NextNode集存在两个及以上的最佳Node,则返回True,否则返回False,若p_list为None或长度小于2,也返回False
"""
if p_list is not None and len(p_list) >= 2:
v_list = NodeDeal.SortNodes(p_list)
v_curNode = v_list[0]
v_neNode = v_list[1]
if v_curNode.f == v_neNode.f:
return True
return False
return False
# Node或Node集的处理
class NodeDeal:
# 对角线移动一格的代价
_diagonalCost = 14
# 上下或左右移动一格的代价
_nonDiagonalCost = 10
@classmethod
def RemoveRepeatNode(cls, p_list: list[Node]):
"""
移除Node集中的重复Node
:param p_list: Node集
:return: 若p_list为None则返回None,否则返回一个列表
"""
if p_list is not None and len(p_list) != 0:
v_list = []
v_length = len(p_list)
for i in range(v_length):
v_isRepeate = False
for j in range(i + 1, v_length):
if p_list[i] == p_list[j]:
v_isRepeate = True
break
if v_isRepeate is False:
v_list.append(p_list[i])
return v_list
return p_list
@classmethod
def RemoveNode(cls, p_sourceList: list[Node], p_node: Node):
"""
移除Node集(p_sourceList)中的某个Node(p_node)
:param p_sourceList: 待处理的Node集
:param p_node: 参考Node
:return: 返回一个列表
"""
v_j1 = p_sourceList is not None and p_node is not None
if v_j1 and len(p_sourceList) != 0:
v_list = []
for n in p_sourceList:
if n != p_node:
v_list.append(n)
return v_list
return p_sourceList
@classmethod
def RemoveNodes(cls, p_sourceList: list[Node], p_refList: list[Node]):
"""
将一个Node集(p_sourceList)中另一个Node集(p_refList)的元素去除
:param p_sourceList: 待处理的原Node集
:param p_refList: 参考Node集
:return: 默认返回一个列表,若p_sourceList或p_refList为None则返回原Node集
"""
v_j1 = p_sourceList is not None and p_refList is not None
if v_j1 and len(p_sourceList) != 0 and len(p_refList) != 0:
v_list = []
for n in p_sourceList:
if NodeCheck.RepeatCheck(p_refList, n) is False:
v_list.append(n)
return v_list
return p_sourceList
@classmethod
def RemoveOutOfRangeNode(cls, p_list: list[Node]):
"""
移除Node集中超出网格范围的Node
:param p_list: 待处理的Node集
:return: 默认返回一个列表,如果p_list为None则返回None
"""
if p_list is not None and len(p_list) != 0:
v_list = []
for n in p_list:
if NodeCheck.OutOfRange(n) is False:
v_list.append(n)
return v_list
return p_list
@classmethod
def ReplaceNode(cls, p_list: list[Node], p_node: Node):
"""
替换Node集中与某个Node相同的Node
:param p_list: Node集
:param p_node: 用于替换的Node
:return: 若p_list和p_node为None则返回None,否则返回一个列表
"""
v_j1 = p_list is not None and p_node is not None
if v_j1 and len(p_list) != 0:
v_list = p_list
if NodeCheck.RepeatCheck(v_list, p_node):
for i in range(len(v_list)):
if v_list[i] == p_node:
v_list[i] = p_node
return v_list
return p_list
@classmethod
def SetWeightValue(cls, p_diagonalCost: int = 14, p_nonDiagonalCost: int = 10):
"""
设置diagonalCost(对角线移动权值)和nonDiagonalCost(非对角线移动权值)
:param p_diagonalCost: 对角线移动权值,默认为14
:param p_nonDiagonalCost: 非对角线移动权值,默认为10
"""
if p_diagonalCost >= 0:
cls.__diagonalCost = p_diagonalCost
if p_nonDiagonalCost >= 0:
cls.__nonDiagonalCost = p_nonDiagonalCost
@classmethod
def CalculateWeight(cls, p_list: list[Node], p_startNode: Node, p_endNode: Node):
"""
计算Node集相对起始点和终点的权值
:param p_list: 原Node集
:param p_startNode: 起始点
:param p_endNode: 终点
:return: 默认返回一个列表,若p_list或p_startNode或p_endNode有一个为None则返回原Node集
"""
v_j1 = p_list is not None and p_startNode is not None and p_endNode is not None
if v_j1 and len(p_list) != 0:
v_list = p_list
for n in v_list:
v_g = cls.CalculateG(n, p_startNode)
v_h = cls.CalculateH(n, p_endNode)
v_f = v_g + v_h
if v_f < n.f or n.f == 0:
n.SetWeight(int(v_f), int(v_g), int(v_h))
return v_list
return p_list
@classmethod
def CalculateG(cls, p_curNode: Node, p_startNode: Node):
"""
计算G值,即当前点Node至起始点Node的权值
:param p_curNode: 当前点Node
:param p_startNode: 起始点Node
:return: 返回一个整数值
"""
v_staX = p_startNode.nodePos.x
v_staY = p_startNode.nodePos.y
v_curX = p_curNode.nodePos.x
v_curY = p_curNode.nodePos.y
if abs(v_curX - v_staX) != abs(v_curY - v_staY):
v_g = abs(v_curX - v_staX) * cls._nonDiagonalCost + abs(
v_curY - v_staY) * cls._nonDiagonalCost
else:
v_g = abs(v_curX - v_staX) * cls._diagonalCost
return v_g
@classmethod
def CalculateH(cls, p_curNode: Node, p_endNode: Node):
"""
计算H值,即当前点Node至终点Node的权值
:param p_curNode: 当前点Node
:param p_endNode: 终点Node
:return: 返回一个整数值
"""
v_endX = p_endNode.nodePos.x
v_endY = p_endNode.nodePos.y
v_colsCount = sd.SharedData.colsCount
v_rowsCount = sd.SharedData.rowsCount
v_curX = p_curNode.nodePos.x
v_curY = p_curNode.nodePos.y
v_minCount = v_colsCount if v_colsCount < v_rowsCount else v_rowsCount
v_listH = []
if v_curX == v_endX:
v_h = abs(v_endY - v_curY) * cls._nonDiagonalCost
v_listH.append(v_h)
elif v_curY == v_endY:
v_h = abs(v_endX - v_curX) * cls._nonDiagonalCost
v_listH.append(v_h)
elif abs(v_curX - v_endX) == abs(v_curY - v_endY):
v_h = abs(v_curX - v_endX) * cls._diagonalCost
v_listH.append(v_h)
elif v_curY > v_endY:
for i in range(1, int(v_rowsCount + 0.5 - v_endY)):
if i <= v_endX - 0.5:
v_x = v_endX - i
v_y = v_endY + i
if abs(v_curX - v_x) == abs(v_curY - v_y):
for j in range(1, v_minCount - 1):
v_xA = v_x - j
v_yA = v_y - j
if v_xA >= 0.5 and v_yA > v_endY:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
v_xB = v_x + j
v_yB = v_y + j
if v_xB < v_endX and v_yB <= v_rowsCount - 0.5:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
elif i <= v_colsCount - 0.5 - v_endX:
v_x = v_endX + i
v_y = v_endY + i
if abs(v_curX - v_x) == abs(v_curY - v_y):
for j in range(1, v_minCount - 1):
v_xA = v_x + j
v_yA = v_y - j
if v_xA <= v_colsCount - 0.5 and v_yA > v_endY:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
v_xB = v_x - j
v_yB = v_y + j
if v_xB > v_endX and v_yB <= v_rowsCount - 0.5:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
for i in range(1, int(v_rowsCount + 0.5 - v_endY)):
if i <= v_endX - 0.5:
v_x = v_endX - i
v_y = v_endY + i
if v_curY == v_y:
if v_curX <= v_x:
v_h = abs(v_x - v_curX) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
else:
v_h = (abs(v_endX - v_curX) + abs(v_curY - v_endY)) * cls._nonDiagonalCost
v_listH.append(v_h)
break
elif v_curX == v_x:
v_h = abs(v_y - v_curY) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
elif i <= v_colsCount - 0.5 - v_endX:
v_x = v_endX + i
v_y = v_endY + i
if v_curY == v_y:
if v_curX >= v_x:
v_h = abs(v_curX - v_x) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
else:
v_h = (abs(v_curX - v_endX) + abs(v_curY - v_endY)) * cls._nonDiagonalCost
v_listH.append(v_h)
break
elif v_curX == v_x:
v_h = abs(v_y - v_curY) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
elif v_curY < v_endY:
for i in range(1, int(v_endY + 0.5)):
if i <= v_endX - 0.5:
v_x = v_endX - i
v_y = v_endY - i
if abs(v_curX - v_x) == abs(v_curY - v_y):
for j in range(1, v_minCount - 1):
v_xA = v_x + j
v_yA = v_y - j
if v_xA < v_endX and v_yA >= 0.5:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
v_xB = v_x - j
v_yB = v_y + j
if v_xB >= 0.5 and v_yB < v_endY:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
elif i <= v_colsCount - 0.5 - v_endX:
v_x = v_endX + i
v_y = v_endY - i
if abs(v_curX - v_x) == abs(v_curY - v_y):
for j in range(1, v_minCount - 1):
v_xA = v_x - j
v_yA = v_y - j
if v_xA > v_endX and v_yA >= 0.5:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
v_xB = v_x + j
v_yB = v_y + j
if v_xB <= v_colsCount - 0.5 and v_yB < v_endY:
v_h = (j + i) * cls._diagonalCost
v_listH.append(v_h)
break
for i in range(1, int(v_endY + 0.5)):
if i <= v_endX - 0.5:
v_x = v_endX - i
v_y = v_endY - i
if v_curY == v_y:
if v_curX <= v_x:
v_h = abs(v_x - v_curX) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
else:
v_h = (abs(v_endX - v_curX) + abs(v_endY - v_curY)) * cls._nonDiagonalCost
v_listH.append(v_h)
break
elif v_curX == v_x:
v_h = abs(v_y - v_curY) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
elif i <= v_colsCount - 0.5 - v_endX:
v_x = v_endX + i
v_y = v_endY - i
if v_curY == v_y:
if v_curX >= v_x:
v_h = abs(v_curX - v_x) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
else:
v_h = (abs(v_curX - v_endX) + abs(v_endY - v_curY)) * cls._nonDiagonalCost
v_listH.append(v_h)
break
elif v_curX == v_x:
v_h = abs(v_y - v_curY) * cls._nonDiagonalCost + i * cls._diagonalCost
v_listH.append(v_h)
break
if len(v_listH) == 0:
return 0
else:
return min(v_listH)
@classmethod
def SortNodes(cls, p_list: list[Node], p_endMax=True):
"""
对Node集按照总权值(f)进行排序
:param p_list: 原Node集
:param p_endMax: 是否按照总权值从小到大排序,默认为True
:return: 默认返回一个列表,若p_list为None则返回原Node集
"""
v_list = p_list
if v_list is not None and len(v_list) != 0:
if p_endMax:
for i in range(0, len(v_list)):
for j in range(i + 1, len(v_list)):
if v_list[i].f > v_list[j].f:
v_node = v_list[i]
v_list[i] = v_list[j]
v_list[j] = v_node
else:
for i in range(0, len(v_list)):
for j in range(i + 1, len(v_list)):
if v_list[i].f < v_list[j].f:
v_node = v_list[i]
v_list[i] = v_list[j]
v_list[j] = v_node
return v_list
@classmethod
def PrintNodes(cls, p_list: list[Node], p_headStr='', p_sep='--'):
"""
控制台打印Node集
:param p_headStr: 头部字符串
:param p_list: 待打印的Node集
:param p_sep: 每个Node之间的间隔符号,默认为"--"
"""
v_len = len(p_list)
v_str = p_headStr
if p_list is not None and v_len != 0:
for i in range(v_len):
if i < v_len - 1:
v_str += str(p_list[i]) + p_sep
else:
v_str += str(p_list[i])
print(v_str)Block.py
from myCodes import Grid as grid
from myCodes import Node as node
from myCodes import SharedData as sd
import threading as th
from myCodes import SearchPath as sp
# 用于生成阻碍物
class Block:
_lock = th.Lock()
_blockCount = 0
_unCheckedNodes = []
_checkedNodes = []
_isImpassable = False
_generateNum = 0
def __init__(self, p_blcokCount: int):
"""
:param p_blcokCount: 生成的障碍物的数量
"""
v_count = int((sd.SharedData.rowsCount * sd.SharedData.colsCount) / 2)
if p_blcokCount <= v_count:
self._blockCount = p_blcokCount
else:
self._blockCount = v_count
self._endNode = sd.SharedNodes().GetEndNode()
def __new__(cls, *args, **kwargs):
if hasattr(Block, '_instance') is False:
with cls._lock:
if hasattr(Block, '_instance') is False:
Block._instance = object.__new__(cls)
return Block._instance
def Create(self):
"""
用于生成障碍物
"""
if self._blockCount != 0:
v_list = []
v_curNode = sd.SharedNodes().GetStartNode()
while self._StartImpasseCheck(v_list, v_curNode) is False:
v_list = self._SelectNode()
self._Reset()
sd.SharedData.blockInfo = '生成BlockNode集次数:' + str(self._generateNum)
v_list = self._GenerateBlock(v_list)
sd.SharedNodes().Submit(v_list)
self._MarkBlockNode(v_list)
# 生成BlockNode集
def _SelectNode(self):
v_list = node.NodeFactory().GenerateNodes(self._blockCount, p_isRandom=True)
return v_list
# 对所生成的BlockNode集进行检测,若出现死胡同则重新生成BlockNode集
def _StartImpasseCheck(self, p_list, p_curNode):
v_isImpassable = self._isImpassable
v_j1 = p_list is not None and p_curNode is not None and v_isImpassable is False
v_nextNodes = self._GetNextNodes(p_curNode, p_list)
if v_j1 and len(p_list) != 0 and len(v_nextNodes) != 0:
if sp.NodeMove().NextNodesMoveCheck(p_list, v_nextNodes, p_curNode) is False:
return False
v_nextNodes = sp.NodeMove().GetNextNodes(p_list, v_nextNodes, p_curNode)
v_XNodes = self._GetXNodes(p_curNode.nodePos.x + 1, v_nextNodes)
v_YNodes = self._GetYNodes(p_curNode.nodePos.y + 1, v_nextNodes)
v_isContainX = node.NodeCheck.IsContainNodes(p_list, v_XNodes)
v_isContainY = node.NodeCheck.IsContainNodes(p_list, v_YNodes)
if v_isContainX and v_isContainY:
self._isImpassable = True
return False
elif v_isContainX is False and v_isContainY is False:
if v_nextNodes[0] == self._endNode:
return True
else:
return self._StartImpasseCheck(p_list, v_nextNodes[0])
else:
if v_isContainX:
v_nextNodes = node.NodeDeal.RemoveNodes(v_nextNodes, v_XNodes)
else:
v_nextNodes = node.NodeDeal.RemoveNodes(v_nextNodes, v_YNodes)
if v_nextNodes[0] == self._endNode:
return True
else:
return self._StartImpasseCheck(p_list, v_nextNodes[0])
return False
# BlockNode集检测重置
def _Reset(self):
self._isImpassable = False
self._unCheckedNodes = []
self._checkedNodes = []
self._generateNum += 1
# 获取处理后的NextNode集
def _GetNextNodes(self, p_curNode, p_list):
v_uclist = self._unCheckedNodes
self._unCheckedNodes = node.NodeDeal.RemoveNode(v_uclist, p_curNode)
self._checkedNodes.append(p_curNode)
v_nextNodes = node.NodeFactory().GenerateNextNodes(p_curNode)
v_nextNodes = node.NodeDeal.RemoveOutOfRangeNode(v_nextNodes)
v_nextNodes = node.NodeDeal.RemoveNodes(v_nextNodes, self._unCheckedNodes)
v_nextNodes = node.NodeDeal.RemoveNodes(v_nextNodes, self._checkedNodes)
v_nextNodes = node.NodeDeal.RemoveNodes(v_nextNodes, p_list)
v_nextNodes = node.NodeDeal.CalculateWeight(v_nextNodes, p_curNode, sd.SharedNodes().GetEndNode())
v_nextNodes = node.NodeDeal.SortNodes(v_nextNodes)
return v_nextNodes
# 获取xNodes
def _GetXNodes(self, p_x, p_list):
v_list = []
for n in p_list:
v_x = n.nodePos.x
if v_x == p_x:
v_list.append(n)
return v_list
# 获取yNodes
def _GetYNodes(self, p_y, p_list):
v_list = []
for n in p_list:
v_y = n.nodePos.y
if v_y == p_y:
v_list.append(n)
return v_list
# 生成Block
def _GenerateBlock(self, p_list):
if p_list is not None and len(p_list) != 0:
v_list = p_list
for n in v_list:
n.nodeTag = node.NodeTag.BLOCKNODE
return v_list
return p_list
# 标记生成Block的Node
def _MarkBlockNode(self, p_list):
if p_list is not None and len(p_list) != 0:
for n in p_list:
grid.Grid.Mark(n, sd.SharedData.blockNodeSize, 'ks')SearchPath.py
from myCodes import SharedData as sd
from myCodes import Node as node
import threading as th
from enum import Enum, unique
@unique
class Direction(Enum):
LeftUp = 1
RightUp = 2
LeftDown = 3
RightDown = 4
Left = 5
Right = 6
Up = 7
Down = 8
NoDirection = 9
# Node移动规则类
class NodeMove:
_lock = th.Lock()
_init = False
def __init__(self):
if self._init is False:
self._nextNodes = []
self._init = True
self._diagonalMoveNode = None
self._nonDiagonalMoveNode = None
self._doubleNonDiagonalMoveNode = None
self._endNode = sd.SharedNodes().GetEndNode()
def __new__(cls, *args, **kwargs):
if hasattr(NodeMove, '_instance') is False:
with cls._lock:
if hasattr(NodeMove, '_instance') is False:
NodeMove._instance = object.__new__(cls)
return NodeMove._instance
def GetNextNodes(self, p_blockNodes: list[node.Node], p_nextNodes: list[node.Node], p_curNode: node.Node):
"""
获取经过移动检测的NextNode集
:param p_blockNodes: 障碍物Node集
:param p_nextNodes: 当前Node的NextNode集
:param p_curNode: 当前Node
:return: 返回经过移动检测的NextNode集
"""
v_list = []
if self.NextNodesMoveCheck(p_blockNodes, p_nextNodes, p_curNode):
for n in self._nextNodes:
v_list.append(n)
return v_list
def GetMoveDirection(self, p_curNode: node.Node, p_nextNode: node.Node):
"""
获取当前Node至下一个Node的移动方向
:param p_curNode: 当前Node
:param p_nextNode: 下一个Node
:return: 返回一个Direction枚举值,若p_curNode或p_nextNode为None,则返回Direction中的NoDirection
"""
v_j1 = p_curNode is not None and p_nextNode is not None
if v_j1:
v_curX = p_curNode.nodePos.x
v_curY = p_curNode.nodePos.y
v_neX = p_nextNode.nodePos.x
v_neY = p_nextNode.nodePos.y
v_X = v_neX - v_curX
v_Y = v_neY - v_curY
if v_X < 0 and v_Y == 0:
return Direction.Left
elif v_X < 0 < v_Y:
return Direction.LeftUp
elif v_X == 0 and v_Y > 0:
return Direction.Up
elif v_X > 0 and v_Y > 0:
return Direction.RightUp
elif v_X > 0 and v_Y == 0:
return Direction.Right
elif v_X > 0 > v_Y:
return Direction.RightDown
elif v_X == 0 and v_Y < 0:
return Direction.Down
else:
return Direction.LeftDown
return Direction.NoDirection
def NextNodeMoveCheck(self, p_blockNodes: list[node.Node], p_nextNode: node.Node, p_curNode: node.Node):
"""
检测当前Node至下一步Node是否可以移动
:param p_blockNodes: 障碍物Node集
:param p_nextNode: 下一步Node
:param p_curNode: 当前Node
:return: 若可移动则返回True,否则返回False
"""
v_j1 = p_nextNode is not None and p_curNode is not None
if v_j1:
v_curX = p_curNode.nodePos.x
v_curY = p_curNode.nodePos.y
v_direction = self.GetMoveDirection(p_curNode, p_nextNode)
if v_direction == Direction.LeftUp:
v_x1 = v_curX - 1
v_y1 = v_curY
v_x2 = v_curX
v_y2 = v_curY + 1
elif v_direction == Direction.RightUp:
v_x1 = v_curX + 1
v_y1 = v_curY
v_x2 = v_curX
v_y2 = v_curY + 1
elif v_direction == Direction.RightDown:
v_x1 = v_curX + 1
v_y1 = v_curY
v_x2 = v_curX
v_y2 = v_curY - 1
elif v_direction == Direction.LeftDown:
v_x1 = v_curX - 1
v_y1 = v_curY
v_x2 = v_curX
v_y2 = v_curY - 1
elif v_direction == Direction.NoDirection:
return False
else:
return True
v_nodeA = node.Node('nodeA', node.NodePosition(v_x1, v_y1))
v_nodeB = node.Node('nodeB', node.NodePosition(v_x2, v_y2))
v_isContainA = node.NodeCheck.RepeatCheck(p_blockNodes, v_nodeA)
v_isContainB = node.NodeCheck.RepeatCheck(p_blockNodes, v_nodeB)
if v_isContainA or v_isContainB:
return False
else:
return True
return False
def NextNodesMoveCheck(self, p_blockNodes: list[node.Node], p_nextNodes: list[node.Node], p_curNode: node.Node):
"""
对当前Node的NextNode集进行可移动检测
:param p_blockNodes: 障碍物Node集
:param p_nextNodes: 当前Node的NextNode集
:param p_curNode: 当前Node
:return: 默认返回True,若NextNode集中不存在下一步可移动的Node则返回False,若p_nextNodes为None或为空集也返回False,若p_curNode为None返回False
"""
if p_nextNodes is None or len(p_nextNodes) == 0 or p_curNode is None:
return False
else:
v_list = []
for n in p_nextNodes:
if self.NextNodeMoveCheck(p_blockNodes, n, p_curNode):
v_list.append(n)
self._nextNodes = v_list
if len(v_list) == 0:
return False
else:
return True
# 对NextNode集进行可替换斜向移动检测
def _DiagonalMoveCheck(self, p_curNode: node.Node, p_nextNodes: list[node.Node], p_neNextNodes: list[node.Node]):
v_nextNode = p_nextNodes[0]
v_neNextNode = p_neNextNodes[0]
v_blockList = sd.SharedNodes().GetBlockNodes()
v_nextDirection = self.GetMoveDirection(p_curNode, v_nextNode)
v_neNextDirection = self.GetMoveDirection(v_nextNode, v_neNextNode)
v_curDirection = self.GetMoveDirection(p_curNode, v_neNextNode)
v_j1 = v_nextDirection == Direction.Left or v_nextDirection == Direction.Right
v_j2 = v_nextDirection == Direction.Up or v_nextDirection == Direction.Down
v_j3 = v_neNextDirection == Direction.Left or v_neNextDirection == Direction.Right
v_j4 = v_neNextDirection == Direction.Up or v_neNextDirection == Direction.Down
v_j5 = v_curDirection == Direction.LeftUp or v_curDirection == Direction.LeftDown
v_j6 = v_curDirection == Direction.RightUp or v_curDirection == Direction.RightDown
v_j7 = self.NextNodeMoveCheck(v_blockList, v_neNextNode, p_curNode)
v_j8 = node.NodeCheck.RepeatCheck(p_nextNodes, v_neNextNode)
v_j9 = self.NextNodeMoveCheck(v_blockList, v_nextNode, p_curNode)
if (v_j1 or v_j2) and (v_j3 or v_j4) and (v_j5 or v_j6) and v_j7 and v_j8 and v_j9:
self._diagonalMoveNode = v_neNextNode
if node.NodeCheck.RepeatCheck(p_nextNodes, self._endNode):
self._diagonalMoveNode = self._endNode
else:
self._diagonalMoveNode = None
def GetDiagonalMoveNode(self, p_curNode: node.Node, p_nextNodes: list[node.Node]):
"""
获取经过可替换斜向移动检测的目标Node
:param p_curNode: 当前Node
:param p_nextNodes: 当前Node的NextNode集
:return: 若一次斜向移动可替换两次非斜向移动,则返回斜向移动的目标Node,否则返回None
"""
v_nextNodes = p_nextNodes
v_j1 = p_curNode is not None and v_nextNodes is not None
if v_j1 and len(v_nextNodes) != 0:
v_neNextNodes = SearchPath().GetNextNodes(v_nextNodes[0])
v_j3 = v_neNextNodes is not None
if v_j3 and len(v_neNextNodes) != 0:
self._DiagonalMoveCheck(p_curNode, v_nextNodes, v_neNextNodes)
return self._diagonalMoveNode
return None
# 二次可替换非斜向移动检测
def _DoubleNonDiagonalMoveCheck(self, p_curNode: node.Node, p_nextNodes: list[node.Node],
p_neNextNodes: list[node.Node]):
v_nextNode = p_nextNodes[0]
v_neNextNode = p_neNextNodes[0]
v_blockList = sd.SharedNodes().GetBlockNodes()
v_nextDirection = self.GetMoveDirection(p_curNode, v_nextNode)
v_neNextDirection = self.GetMoveDirection(v_nextNode, v_neNextNode)
v_curDirection = self.GetMoveDirection(p_curNode, v_neNextNode)
v_j1 = v_nextDirection == Direction.LeftUp and v_neNextDirection == Direction.RightUp
v_j2 = v_nextDirection == Direction.RightUp and v_neNextDirection == Direction.LeftUp
v_j3 = v_nextDirection == Direction.LeftDown and v_neNextDirection == Direction.RightDown
v_j4 = v_nextDirection == Direction.RightDown and v_neNextDirection == Direction.LeftDown
v_j5 = v_nextDirection == Direction.LeftUp and v_neNextDirection == Direction.LeftDown
v_j6 = v_nextDirection == Direction.RightUp and v_neNextDirection == Direction.RightDown
v_j7 = v_nextDirection == Direction.LeftDown and v_neNextDirection == Direction.LeftUp
v_j8 = v_nextDirection == Direction.RightDown and v_neNextDirection == Direction.RightUp
v_j9 = v_curDirection == Direction.Left
v_j10 = v_curDirection == Direction.Up
v_j11 = v_curDirection == Direction.Right
v_j12 = v_curDirection == Direction.Down
v_k1 = (v_j5 or v_j7) and v_j9
v_k2 = (v_j1 or v_j2) and v_j10
v_k3 = (v_j6 or v_j8) and v_j11
v_k4 = (v_j3 or v_j4) and v_j12
v_x = p_curNode.nodePos.x
v_y = p_curNode.nodePos.y
v_nodePos = node.NodePosition(v_nextNode.nodePos.x, v_nextNode.nodePos.y)
v_node = node.Node(v_nextNode.nodeName, v_nodePos)
if v_k1:
v_node.nodePos = node.NodePosition(v_x - 1, v_y)
elif v_k2:
v_node.nodePos = node.NodePosition(v_x, v_y + 1)
elif v_k3:
v_node.nodePos = node.NodePosition(v_x + 1, v_y)
elif v_k4:
v_node.nodePos = node.NodePosition(v_x, v_y - 1)
v_j13 = self.NextNodeMoveCheck(v_blockList, v_neNextNode, p_curNode)
v_j14 = self.NextNodeMoveCheck(v_blockList, v_node, p_curNode)
if (v_k1 or v_k2 or v_k3 or v_k4) and v_j13 and v_j14:
self._doubleNonDiagonalMoveNode = v_node
if node.NodeCheck.RepeatCheck(p_nextNodes, self._endNode):
self._doubleNonDiagonalMoveNode = self._endNode
else:
self._doubleNonDiagonalMoveNode = None
def GetDoubleNonDiagonalMoveNode(self, p_curNode: node.Node, p_nextNodes: list[node.Node]):
"""
获取经过二次可替换非斜向移动检测的目标Node
:param p_curNode: 当前Node
:param p_nextNodes: 当前Node的NextNode集
:return: 若二次斜向移动可替换为二次非斜向移动,则返回非斜向移动的目标Node,否则返回None
"""
v_nextNodes = p_nextNodes
v_j1 = p_curNode is not None and v_nextNodes is not None
if v_j1 and len(v_nextNodes) != 0:
v_neNextNodes = SearchPath().GetNextNodes(v_nextNodes[0])
v_j3 = v_neNextNodes is not None
if v_j3 and len(v_neNextNodes) != 0:
self._DoubleNonDiagonalMoveCheck(p_curNode, v_nextNodes, v_neNextNodes)
return self._doubleNonDiagonalMoveNode
return None
def GetDirectionNodes(self, p_curNode: node.Node):
"""
获取上一个Node与当前Node的方向Node集
:param p_curNode: 当前Node
:return: 返回一个列表,即上一个Node与当前Node的方向Node集
"""
if p_curNode is not None and p_curNode.preNode is not None:
v_preNode = p_curNode.preNode
v_direction = NodeMove().GetMoveDirection(p_curNode, v_preNode)
v_curX = p_curNode.nodePos.x
v_curY = p_curNode.nodePos.y
v_list = []
v_LNode = node.Node('LNode', node.NodePosition(v_curX - 1, v_curY))
v_LUNode = node.Node('LUNode', node.NodePosition(v_curX - 1, v_curY + 1))
v_UNode = node.Node('UNode', node.NodePosition(v_curX, v_curY + 1))
v_RUNode = node.Node('RUNode', node.NodePosition(v_curX + 1, v_curY + 1))
v_RNode = node.Node('RNode', node.NodePosition(v_curX + 1, v_curY))
v_RDNode = node.Node('RDNode', node.NodePosition(v_curX + 1, v_curY - 1))
v_DNode = node.Node('DNode', node.NodePosition(v_curX, v_curY - 1))
v_LDNode = node.Node('LDNode', node.NodePosition(v_curX - 1, v_curY - 1))
if v_direction == Direction.Left:
v_list.extend([v_LDNode, v_LNode, v_LUNode])
elif v_direction == Direction.LeftUp:
v_list.extend([v_LNode, v_LUNode, v_UNode])
elif v_direction == Direction.Up:
v_list.extend([v_LUNode, v_UNode, v_RUNode])
elif v_direction == Direction.RightUp:
v_list.extend([v_UNode, v_RUNode, v_RNode])
elif v_direction == Direction.Right:
v_list.extend([v_RUNode, v_RNode, v_RDNode])
elif v_direction == Direction.RightDown:
v_list.extend([v_RNode, v_RDNode, v_DNode])
elif v_direction == Direction.Down:
v_list.extend([v_RDNode, v_DNode, v_LDNode])
elif v_direction == Direction.LeftDown:
v_list.extend([v_DNode, v_LDNode, v_LNode])
return v_list
return None
def DirectionNodeCheck(self, p_curNode: node.Node, p_list: [node.Node]):
"""
对当前Node的NextNode集进行方向Node集检测
:param p_curNode: 当前Node
:param p_list: 当前Node的NextNode集
:return: 返回一个列表,即检测处理后的NextNode集
"""
v_directionNodes = self.GetDirectionNodes(p_curNode)
if v_directionNodes is not None and p_list is not None and len(p_list) != 0:
v_list = []
for n in p_list:
if node.NodeCheck.RepeatCheck(v_directionNodes, n) is False:
v_list.append(n)
return v_list
return p_list
# 查找最佳路径
class SearchPath:
_lock = th.Lock()
_currentNode: node.Node
# 是否完成了初始化
_isInit = False
_isSearchFinish = False
_nextNode = None
_SearchNum = 0
_closeList = []
_checkedList = []
_lockedList = []
# 网格行列数
_rowsCount = 0
_colsCount = 0
# x和y的最小值
_minX = 0.5
_minY = 0.5
# x和y的最大值
_maxX = 0
_maxY = 0
# 终点Node
_endNode: node.Node
def __init__(self):
if self._isInit is False:
self._currentNode = sd.SharedNodes().GetStartNode()
self._nextNode = self._currentNode
self._rowsCount = sd.SharedData.rowsCount
self._colsCount = sd.SharedData.colsCount
self._maxX = self._colsCount - 0.5
self._maxY = self._rowsCount - 0.5
self._endNode = sd.SharedNodes().GetEndNode()
self._blockList = sd.SharedNodes().GetBlockNodes()
self._isInit = True
def __new__(cls, *args, **kwargs):
if hasattr(SearchPath, '_instance') is False:
with cls._lock:
if hasattr(SearchPath, '_instance') is False:
SearchPath._instance = object.__new__(cls)
return SearchPath._instance
def Search(self, p_isPrint=False):
"""
查找最佳路径
:param p_isPrint: 是否在控制台打印最佳路径的Node集信息,默认为False
"""
while self._isSearchFinish is False:
self._GetPathNodes()
if self._SearchNum >= 5:
break
sd.SharedNodes().Submit(self._closeList)
if p_isPrint:
node.NodeDeal.PrintNodes(self._closeList, '-->')
# 获取路径Node集
def _GetPathNodes(self):
self._SearchNum += 1
while self._UpdateCurrentNode():
v_nextNodes = self.GetNextNodes(self._currentNode)
v_nextNodes = self._NextNodesCheck(self._currentNode, v_nextNodes)
self._NodesApplication(v_nextNodes)
if self._isSearchFinish is False:
self._Reset()
def GetNextNodes(self, p_curNode):
"""
获取经过基本处理的当前Node的NextNode集
:param p_curNode: 当前Node
:return: 返回一个列表
"""
v_list = node.NodeFactory().GenerateNextNodes(p_curNode)
v_list = self._NodesFilter(v_list)
v_list = node.NodeDeal.CalculateWeight(v_list, self._currentNode, self._endNode)
v_list = node.NodeDeal.SortNodes(v_list)
v_list = NodeMove().GetNextNodes(self._blockList, v_list, p_curNode)
return v_list
# 对NextNode集进行移动规则检测
def _NextNodesCheck(self, p_curNode, p_list):
v_list = p_list
v_node = NodeMove().GetDoubleNonDiagonalMoveNode(p_curNode, v_list)
if v_node is not None:
v_list.insert(0, v_node)
v_node = NodeMove().GetDiagonalMoveNode(p_curNode, v_list)
if v_node is not None:
v_list.insert(0, v_node)
v_list = NodeMove().DirectionNodeCheck(p_curNode, v_list)
return v_list
# 重置
def _Reset(self):
self._closeList = []
self._isStart = False
self._nextNode = sd.SharedNodes().GetStartNode()
self._checkedList = []
# 对NextNode集进行筛选
def _NodesFilter(self, p_list):
if p_list is not None and len(p_list) != 0:
v_list2 = []
v_list1 = node.NodeDeal.RemoveOutOfRangeNode(p_list)
for n in v_list1:
v_isInCheckedList = node.NodeCheck.RepeatCheck(self._checkedList, n)
v_isInCloseList = node.NodeCheck.RepeatCheck(self._closeList, n)
v_isInBlockList = node.NodeCheck.RepeatCheck(self._blockList, n)
v_isInLockedList = node.NodeCheck.RepeatCheck(self._lockedList, n)
v_j1 = v_isInCloseList is False and v_isInBlockList is False
v_j2 = v_isInCheckedList is False and v_isInLockedList is False
if v_j1 and v_j2:
v_list2.append(n)
return v_list2
return p_list
# 应用经过基本处理和移动规则检测的NextNode集
def _NodesApplication(self, p_list):
if p_list is not None and len(p_list) != 0:
v_j1 = node.NodeCheck.RepeatCheck(p_list, self._endNode)
v_j2 = NodeMove().NextNodeMoveCheck(self._blockList, self._endNode, self._currentNode)
if v_j1 and v_j2:
self._nextNode = self._endNode
self._isSearchFinish = True
else:
v_list = self._GetDirectionNodes(self._currentNode)
self._checkedList.extend(v_list)
self._checkedList = node.NodeDeal.RemoveRepeatNode(self._checkedList)
self._nextNode = p_list[0]
else:
self._nextNode = None
# 获取上一个Node和当前Node的方向Node集
def _GetDirectionNodes(self, p_curNode):
v_directionNodes = []
if p_curNode is not None:
v_directionNodes = NodeMove().GetDirectionNodes(p_curNode)
return v_directionNodes
# 更新当前Node
def _UpdateCurrentNode(self):
if self._nextNode is None:
self._lockedList.append(self._currentNode)
self._lockedList = node.NodeDeal.RemoveRepeatNode(self._lockedList)
return False
self._currentNode.nextNode = self._nextNode
self._nextNode.preNode = self._currentNode
self._currentNode = self._nextNode
v_isInCloseList = node.NodeCheck.RepeatCheck(self._closeList, self._currentNode)
if v_isInCloseList is False:
self._closeList.append(self._currentNode)
if self._currentNode == self._endNode:
self._isSearchFinish = True
return False
return True
return FalseSharedData.py
from myCodes import Node as node
import threading as th
# 共享信息类
class SharedData:
# 网格行列数
startNodeSize = 0
endNodeSize = 0
blockNodeSize = 0
pathNodeSize = 0
arrowWidth = 0
fontSize = 0
rowsCount = 0
colsCount = 0
blockInfo = ''
@classmethod
def GetSizes(cls, p_rowsCount: int, p_colsCount: int):
"""
获取默认尺寸元组
:param p_rowsCount: 网格行数
:param p_colsCount: 网格列数
:return: 返回一个元组
"""
if p_rowsCount == 3:
if p_colsCount == 3:
v_sizes = (60, 60, 102, 40, 0.05, 15)
elif p_colsCount == 4:
v_sizes = (55, 55, 102, 35, 0.04, 14)
elif p_colsCount == 5:
v_sizes = (50, 50, 88, 30, 0.03, 13)
elif p_colsCount == 6:
v_sizes = (45, 45, 72, 25, 0.02, 12)
elif p_colsCount == 7:
v_sizes = (40, 40, 62, 20, 0.02, 11)
else:
v_sizes = ()
elif p_rowsCount == 4:
if p_colsCount == 3 or 4 or 5:
v_sizes = (55, 55, 75, 35, 0.04, 14)
elif p_colsCount == 6:
v_sizes = (50, 50, 72, 30, 0.03, 13)
elif p_colsCount == 7:
v_sizes = (45, 45, 62, 25, 0.03, 12)
else:
v_sizes = ()
elif p_rowsCount == 5:
if p_colsCount == 3 or 4 or 5 or 6:
v_sizes = (45, 45, 60, 25, 0.03, 12)
elif p_colsCount == 7:
v_sizes = (45, 45, 62, 25, 0.03, 12)
else:
v_sizes = ()
elif p_rowsCount == 6:
if p_colsCount == 3 or 4 or 5 or 6 or 7:
v_sizes = (35, 35, 50, 15, 0.02, 10)
else:
v_sizes = ()
elif p_rowsCount == 7:
if p_colsCount == 3 or 4 or 5 or 6 or 7:
v_sizes = (30, 30, 42, 10, 0.01, 9)
else:
v_sizes = ()
else:
v_sizes = ()
return v_sizes
# 共享Node和Node集
class SharedNodes:
_instanceLock = th.Lock()
_lock = th.Lock()
_sharedNodes = []
_pathNodes = []
_blockNodes = []
_isUpdatePathNodes = False
_isUpdateBlockNodes = False
_startNode: node.Node
_endNode: node.Node
def __init__(self):
node.NodeFactory()
def __new__(cls, *args, **kwargs):
if hasattr(SharedNodes, '_instance') is False:
with cls._instanceLock:
if hasattr(SharedNodes, '_instance') is False:
SharedNodes._instance = object.__new__(cls)
return SharedNodes._instance
# 起始点Node的设置
def SetStartNode(self, p_node: node.Node, p_password: str = ''):
"""
设置起始点Node
:param p_node: 起始点Node
:param p_password: 调用密码
"""
if p_node is not None and p_password == 'SNSET':
self._startNode = p_node
# 终点Node的设置
def SetEndNode(self, p_node: node.Node, p_password: str = ''):
"""
设置终点Node
:param p_node: 终点Node
:param p_password: 调用密码
"""
if p_node is not None and p_password == 'ENSET':
self._endNode = p_node
def GetStartNode(self):
"""
获取起始点Node
:return: 返回Node
"""
v_node = node.Node(self._startNode.nodeName, self._startNode.nodePos)
v_node.f = self._startNode.f
v_node.g = self._startNode.g
v_node.h = self._startNode.h
v_node.nodeTag = self._startNode.nodeTag
return v_node
def GetEndNode(self):
"""
获取终点Node
:return: 返回Node
"""
v_node = node.Node(self._endNode.nodeName, self._endNode.nodePos)
v_node.f = self._endNode.f
v_node.g = self._endNode.g
v_node.h = self._endNode.h
v_node.nodeTag = self._endNode.nodeTag
return v_node
def GetPathNodes(self):
# 起初该方法是直接返回cls.__pathNodes,这就导致了数据安全性的问题,使得在外部可以直接修改这里pathNodes的数据,所以正确的做法应该像现在这样
# 声明一个新的列表,然后将cls.__pathNodes中的值添加进去,再将新的列表作为返回值传递出去,这说明在Python中直接传递内部的静态变量会传递其引用
"""
获取PathNode集
:return: 返回一个列表
"""
self._UpdateNodes(node.NodeTag.PATHNODE)
v_pathNodes = []
for n in self._pathNodes:
v_pathNodes.append(n)
return v_pathNodes
def GetBlockNodes(self):
"""
获取BlockNode集
:return: 返回一个列表
"""
self._UpdateNodes(node.NodeTag.BLOCKNODE)
v_blockNodes = []
for n in self._blockNodes:
v_blockNodes.append(n)
return v_blockNodes
def Submit(self, p_list: list[node.Node]):
"""
通过该方法可以实现Node集的添加、删除、修改,建议与GetPathNodes或GetBlockNodes方法配套使用
:param p_list: 修改后的Node集
:return: 无返回值
"""
v_list = node.NodeDeal.RemoveRepeatNode(p_list)
v_list = self._PollutionNodeCheck(v_list)
self._ReplaceSharedNodes(v_list)
self._AddToSharedNodes(v_list)
v_tag = self._GetNodesType(v_list)
self._DeleteSharedNodes(v_list, v_tag)
if v_tag == node.NodeTag.PATHNODE:
self._isUpdatePathNodes = False
else:
self._isUpdateBlockNodes = False
self._UpdateNodes(v_tag)
# 更新PathNode集和BlockNode集
def _UpdateNodes(self, p_tag):
if p_tag == node.NodeTag.PATHNODE:
if self._isUpdatePathNodes is False:
with self._lock:
v_list = []
for n in self._sharedNodes:
if n.nodeTag == node.NodeTag.PATHNODE:
v_list.append(n)
self._pathNodes = v_list
self._isUpdatePathNodes = True
else:
if self._isUpdateBlockNodes is False:
with self._lock:
v_list = []
for n in self._sharedNodes:
if n.nodeTag == node.NodeTag.BLOCKNODE:
v_list.append(n)
self._blockNodes = v_list
self._isUpdateBlockNodes = True
# 脏数据清理
def _PollutionNodeCheck(self, p_list):
if p_list is not None and len(p_list) != 0:
v_tag = self._GetNodesType(p_list)
if v_tag is None:
return p_list
v_list = []
for n in p_list:
if n.nodeTag == v_tag:
v_list.append(n)
return v_list
return p_list
# 获取当前Node集的种类:PathNode集或BlockNode集
def _GetNodesType(self, p_list):
if p_list is not None and len(p_list) != 0:
v_pathNodeCount = 0
v_blockNodeCount = 0
for n in p_list:
if n.nodeTag == node.NodeTag.PATHNODE:
v_pathNodeCount += 1
else:
v_blockNodeCount += 1
if v_pathNodeCount > v_blockNodeCount:
return node.NodeTag.PATHNODE
elif v_pathNodeCount < v_blockNodeCount:
return node.NodeTag.BLOCKNODE
else:
return None
return None
# Node集的修改功能
def _ReplaceSharedNodes(self, p_list):
if p_list is not None and len(p_list) != 0:
with self._lock:
v_list = self._sharedNodes
for n in p_list:
v_list = node.NodeDeal.ReplaceNode(v_list, n)
self._sharedNodes = v_list
# Node集的添加功能
def _AddToSharedNodes(self, p_list):
if p_list is not None and len(p_list) != 0:
with self._lock:
v_list = []
for n in p_list:
if node.NodeCheck.RepeatCheck(self._sharedNodes, n) is False:
v_list.append(n)
self._sharedNodes.extend(v_list)
# Node集的删除功能
def _DeleteSharedNodes(self, p_list: list, p_tag: node.NodeTag):
if p_list is not None and len(p_list) != 0:
with self._lock:
if p_tag == node.NodeTag.PATHNODE:
v_nodes = self._pathNodes
else:
v_nodes = self._blockNodes
for n in v_nodes:
if node.NodeCheck.RepeatCheck(p_list, n) is False:
v_index = self._sharedNodes.index(n)
del self._sharedNodes[v_index]Main.py
from myCodes import SearchPath as sp
from myCodes import Grid as grid
from myCodes import Block as block
# 创建网格,传递行数和列数
g = grid.Grid(7, 7)
# 生成障碍物
block.Block(30).Create()
# 查找最佳路径
sp.SearchPath().Search()
# 绘制图象
g.Draw()代码解说
本篇中我们需要重点关注的是这三个类:NodeMove、NodeDeal、SearchPath,NodeMove类主要负责移动规则的制定和检测,NodeDeal类主要负责Node以及Node集相关的处理,SearchPath类主要负责最佳路径的查找。在NodeMove类中包括这几个重要的方法,GetNextNodes用于获取经过可移动检测的NextNode集,GetMoveDirection用于获取当前Node至下一步Node的方向,NextNodeMoveCheck用于检测当前Node至下一步Node是否可移动,NextNodesMoveCheck用于检测当前Node的NextNode集中是否存在可移动的Node,GetDiagonalMoveNode用于获取经过可替换斜向移动检测的目标Node,GetDoubleNonDiagonalMoveNode用于获取经过二次可替换非斜向移动检测的目标Node,GetDirectionNodes用于获取上一个Node至当前Node的方向Node集,DirectionNodeCheck用于对当前Node的NextNode集进行方向Node集检测。在NodeDeal类中包括这几个重要的方法,SetWeightValue用于设置一次斜向移动和一次非斜向移动的权值,CalculateWeight用于对Node集进行权值计算,CalculateG用于计算Node的G值,CalculateH用于计算Node的H值,当然还包括其它的一些Node集处理方法。SearchPath类中的Search方法负责调度和组合查找最佳路径相关的方法。我们虽已完成了基本的寻路算法,但是这只是一种简单模拟的情景,也就是我们在一个网格中,生成了障碍物,然后我们需要根据移动规则来找到从起始点到终点的最佳路径,但是这只是静态的情景,在游戏中,我们把起始点比作敌人,终点比作玩家,那么玩家通常是在不断移动的,所以我们需要在终点进行移动的同时动态调整路径,以实现对终点的追踪,我们将在后续的文章中继续对这个问题进行探讨。
下一篇将针对路径的动态规划问题进行进一步的探索和实现
如果这篇文章对你有帮助,请给作者点个赞吧!