GMapping应用程序
GMapping 是一个使用 OpenSlam 软件库的地图生成工具。 该应用程序允许您创建地图以在其他应用程序中使用。
GMapping 应用程序使用 Carter 参考机器人的 LIDAR 功能。
注意
建图是一项计算密集型和存储密集型活动,可能需要微调才能生成合适的建筑地图。 为获得最佳结果,请记录您的建图日志并离线调整 GMapping 参数。
根据机器人的能力,利用里程计或机器人姿势的姿势树。 使用惯性测量单元 (IMU) 来改进结果。
虽然您可以在桌面上运行 GMapping 应用程序,但对于实际的地图绘制,它必须部署并在 Carter 机器人上运行。
部署和运行 GMapping 应用程序
-
按照应用程序控制台选项中的说明将 //apps/carter/gmapping:gmapping-pkg 部署到机器人。
-
在选择目标机器人配置文件的同时运行 GMapping 应用程序:
bob@carter1:~/gmapping-pkg$ ./apps/carter/gmapping/gmapping --more "apps/carter/robots/carter_1.json"
输出
示例应用程序在整个运行过程中将地图写入 /tmp/map.img_.png 文件夹。 使用以下配置参数为 Gmapping codelet 指定输出路径:
"config": {
"gmapping.gmapping": {
"GMapping": {
"file_path": "/tmp"
}
}
}
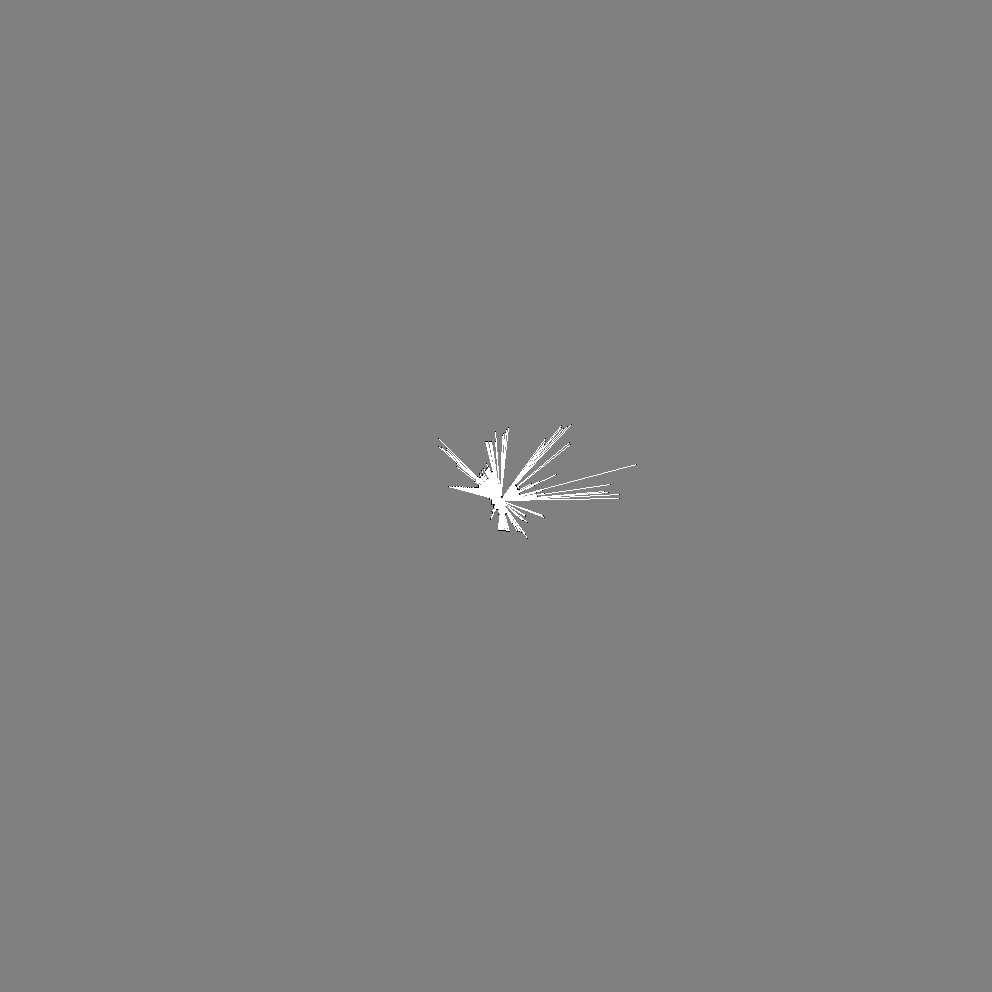
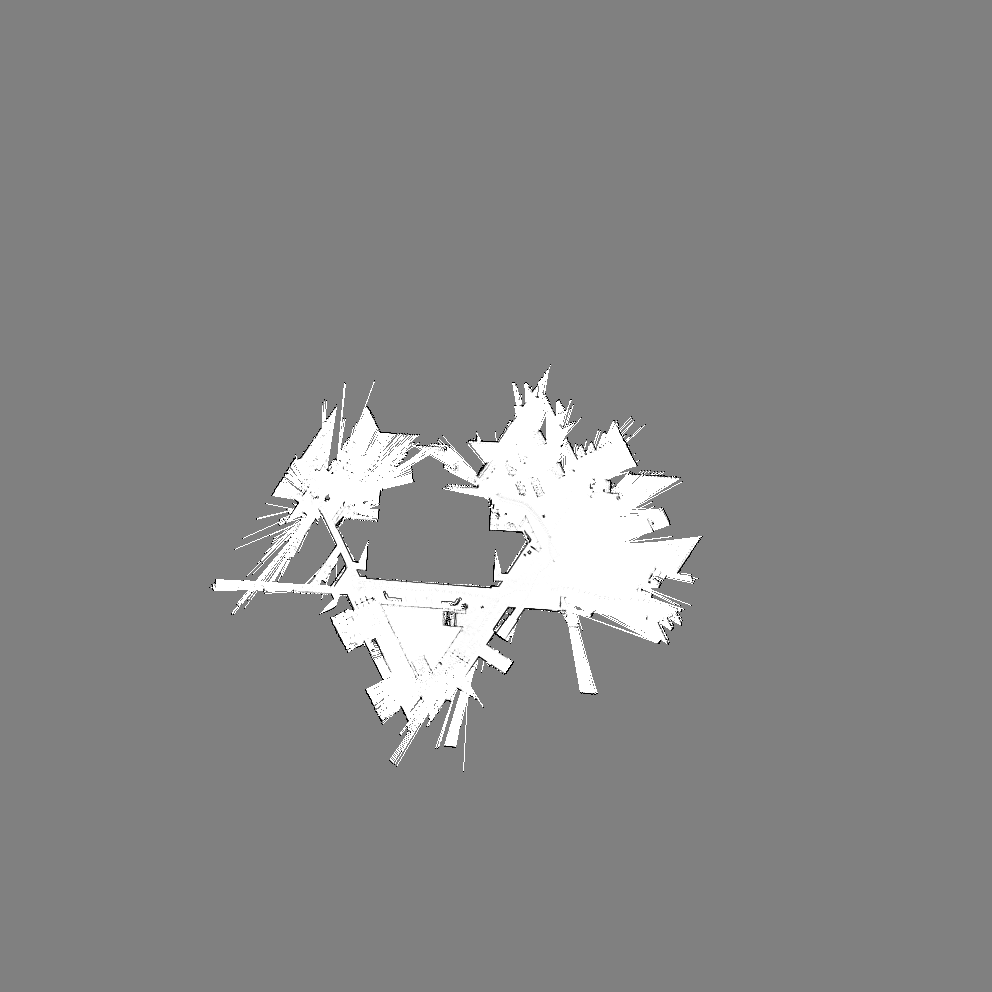
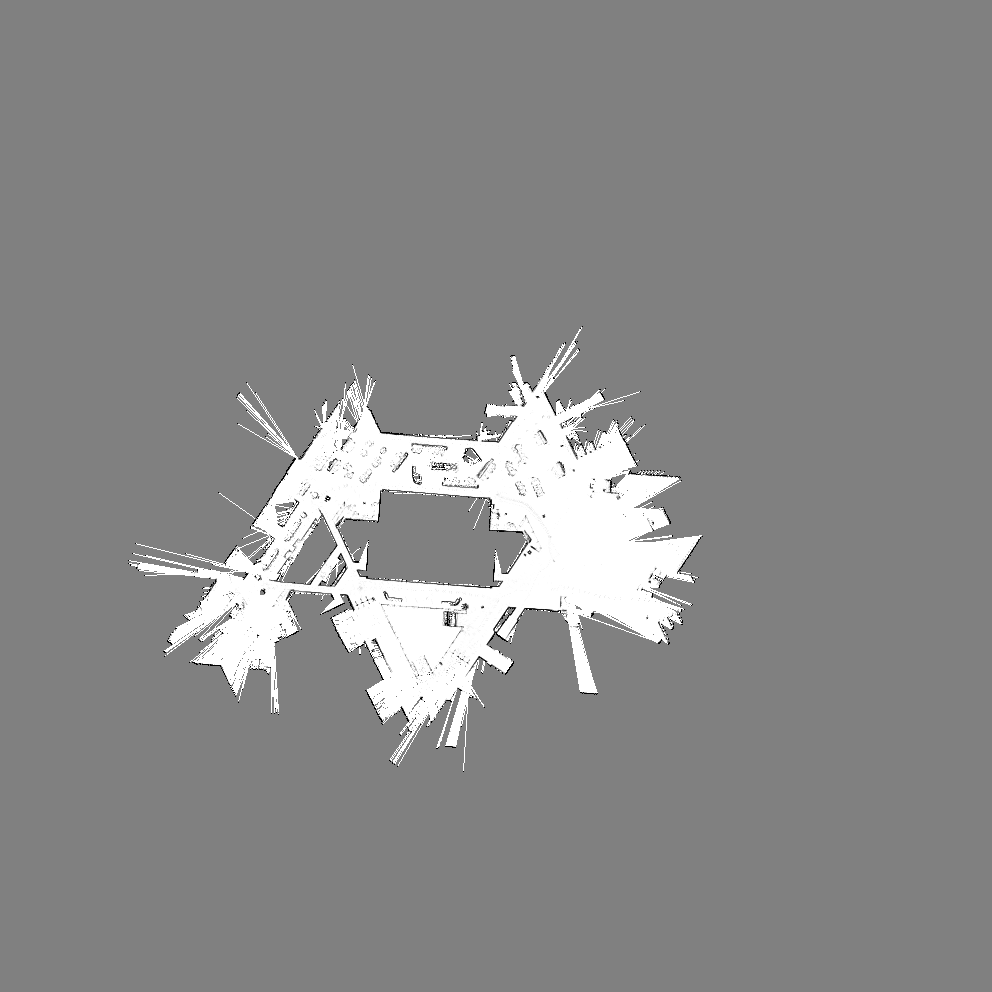
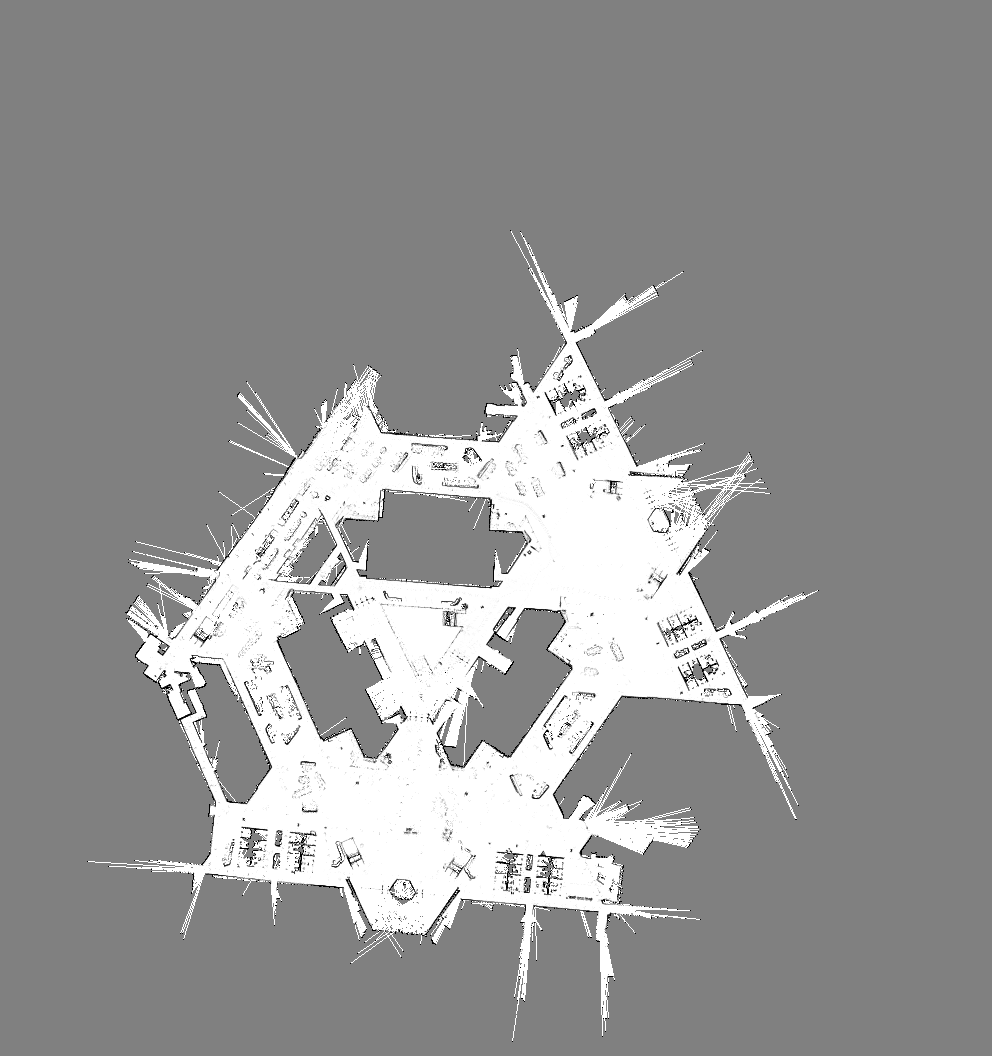
建图示例
下面的图像序列说明了随着时间的推移,从第一次激光雷达数据捕获到建筑物地图的建图过程。



建图建议
机器人在建图过程中移动的速度会影响结果。 速度越慢,LIDAR 样本的数量越多,从而提高了准确性。 避免急转弯。 配置机器人以限制最大线速度和角速度。
定期匹配和关闭路径循环,以纠正测绘期间里程计和惯性测量中的漂移和错误。 匹配深度是有限的。 在可能的情况下,绕建筑物中的街区导航,例如隔间畜栏和大型建筑元素。 无需驾车穿过已绘制地图的区域; 它会增加噪音。
从帧到帧保持足够的锚点。 这在离开或进入新区域或转入走廊时尤为重要。 避免驾驶太靠近墙壁。 选择与您的建筑拓扑一样高的(匹配)粒子数量,您可以在不丢失扫描匹配或仅恢复到里程计的情况下,这会导致糟糕的建图结果。
使用足够长的范围来帮助维护锚点,但使用较小的更新范围来绘制清晰的地图图像。 理想情况下,您的更新范围不应大于要建图的最大区域长度的一半。
在使用日志建图应用程序完成真实世界捕获后,记录您的扫描和里程计通道以重播和创建具有不同参数的新地图。 调整配置参数以针对您的建图用例进行试验。
使用 GMapping 或 logamppings 生成的地图时,修剪地图图像的灰色边缘。 这减少了文件的大小并提高了使用地图图像的算法的性能。 修改后,将这些地图保存为灰度、压缩、PNG 格式,以显着减小文件大小。
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561