10 I2C总线
[toc]
注:笔记主要参考B站江科大自化协教学视频“51单片机入门教程-2020版 程序全程纯手打 从零开始入门”。
10.1 AT24C02和I2C介绍
10.1.1 存储器介绍
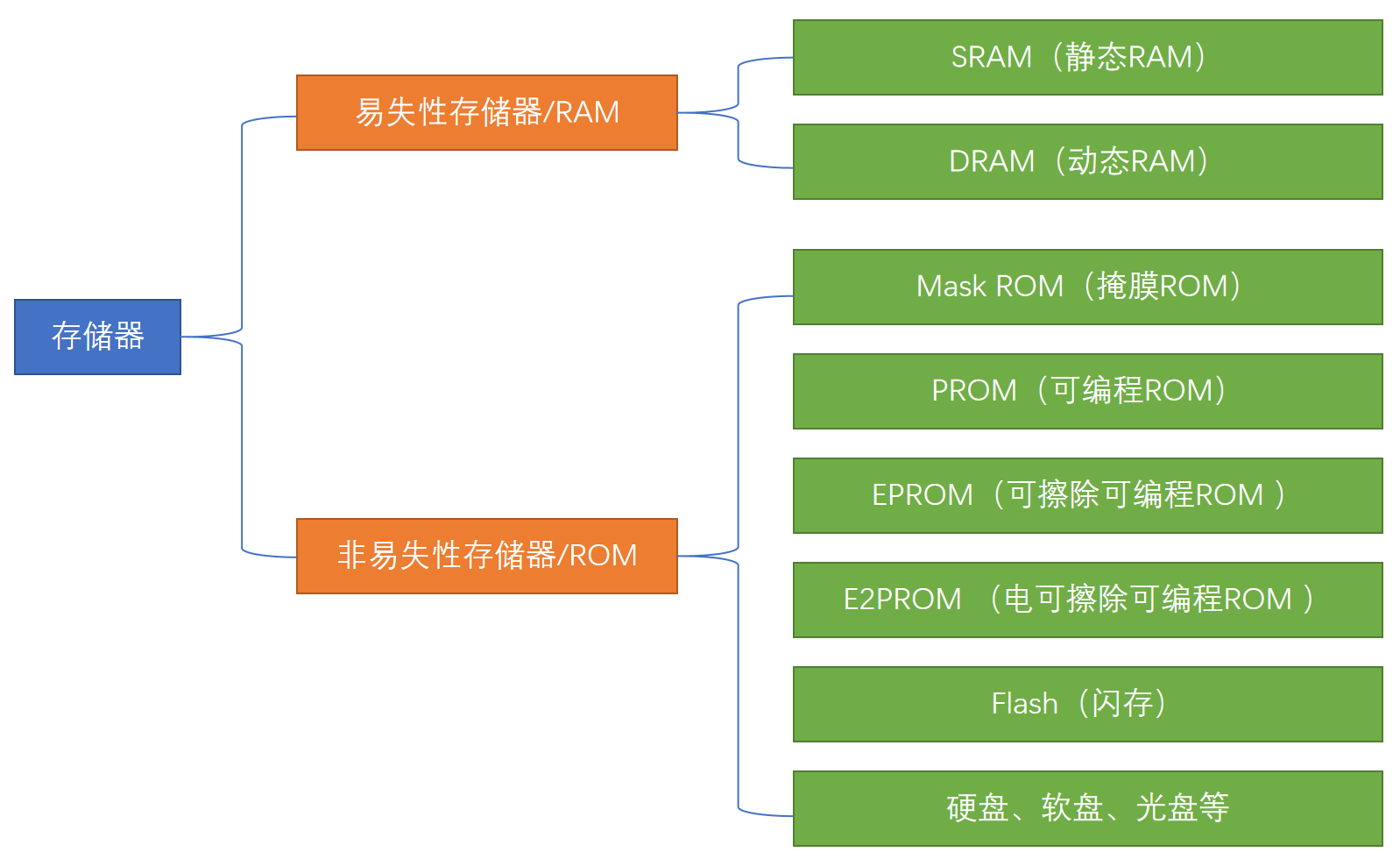
一般来说,RAM读写速度极快,但掉电丢失;而ROM相对来说读写速度慢,但是可以长期存储数据。
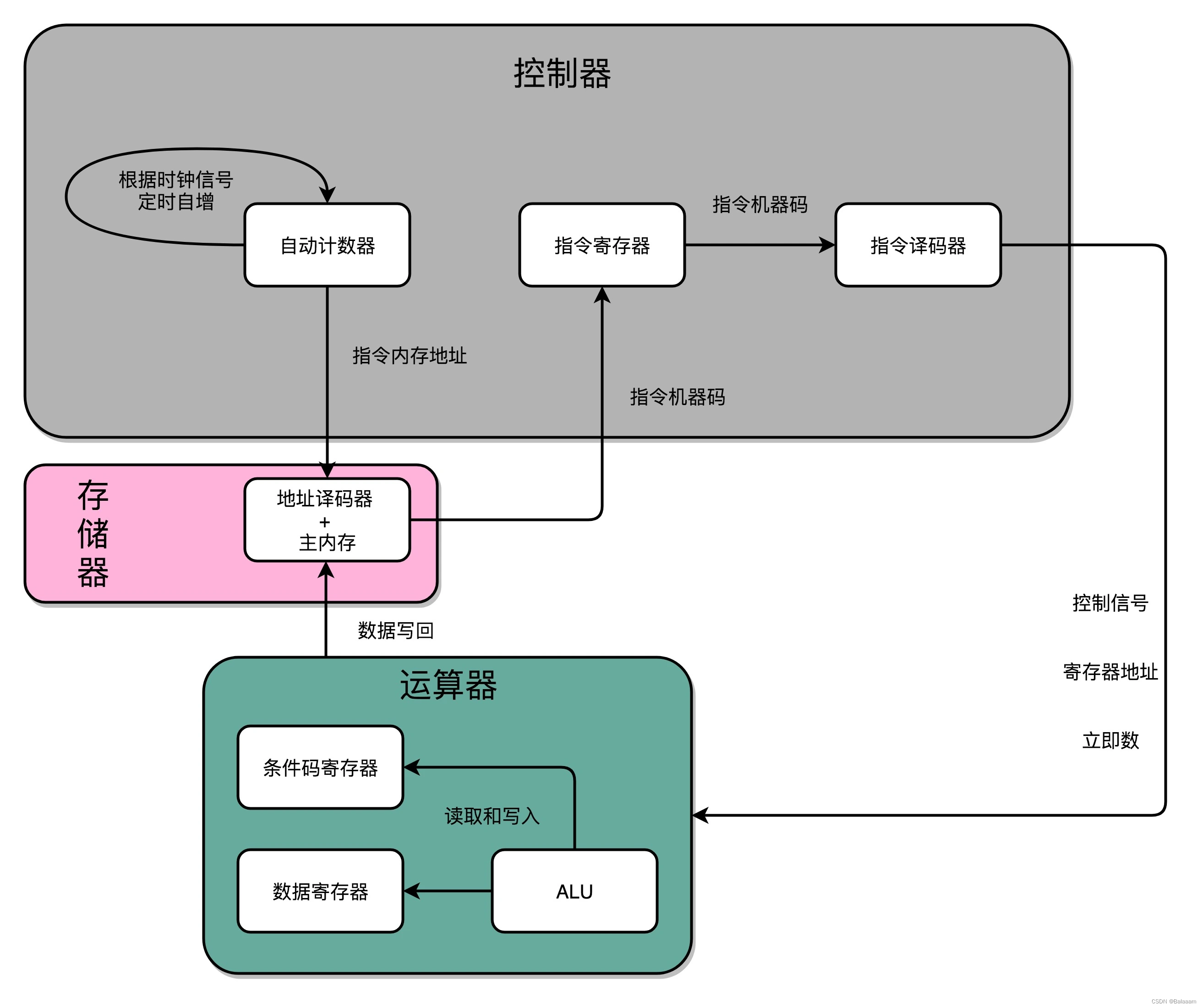
从实现功能的角度来说,只需要关注“地址总线”和“数据总线”即可。为了使主机和从机完成对这些数据的交互,便渐渐的演变出一些实用的特定格式的通信方式,但这些通信方式本身最重要的都是控制“地址”和“数据”的读写。
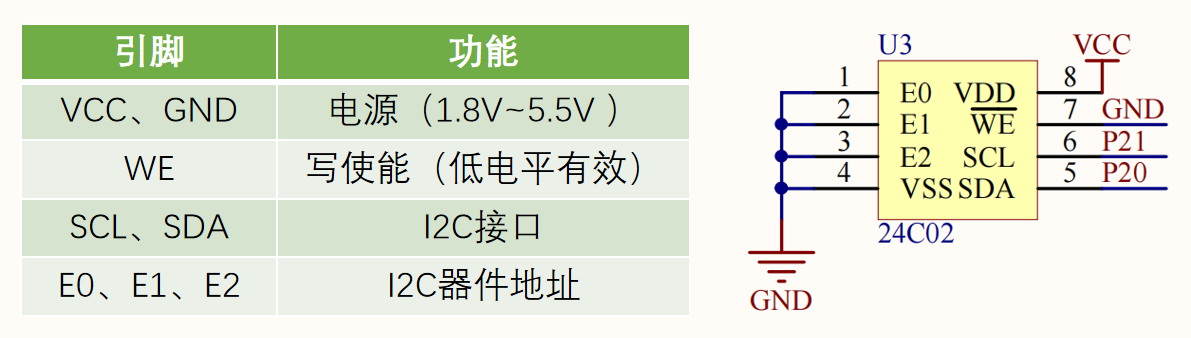
10.1.2 AT24C02介绍
AT24C02是一种可以实现掉电不丢失的存储器,可用于保存单片机运行时想要永久保存的数据信息。
存储介质:E2PROM。
通讯接口:I2C总线。
容量:256字节,即地址位宽位16,范围是0~255。
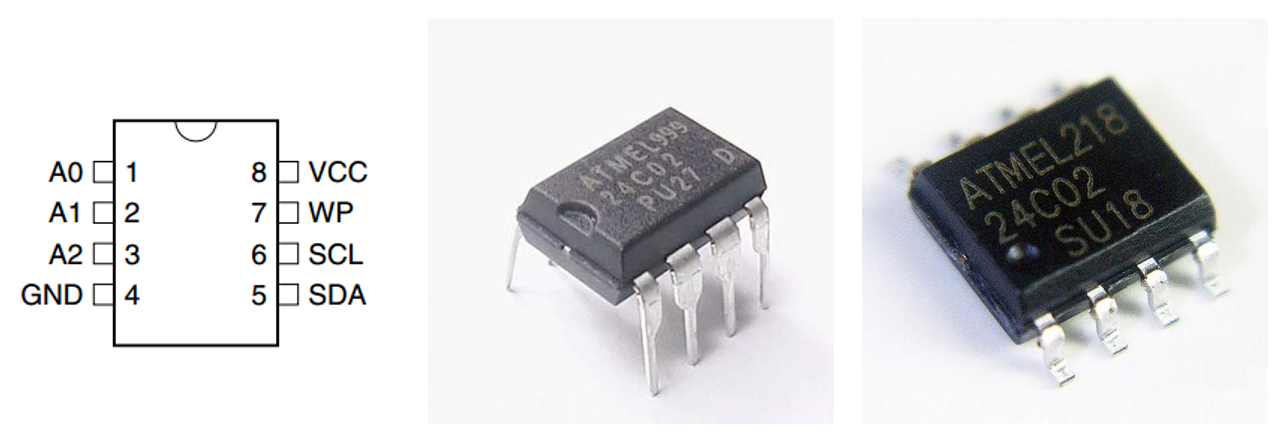
根据下面芯片的引脚,只需要记住此开发板上EEPROM的“器件地址”为000,其余的只需要考虑SCL和SDA两根线的通信细节即可。
10.1.3 I2C总线介绍
I2C总线(Inter IC BUS)是由Philips公司开发的一种通用数据总线,只需要两根通信线:SCL(Serial Clock)、SDA(Serial Data)便可以实现同步、半双工通信。通信过程中包含数据应答位ACK,进一步提高了通信的可靠性。通用的I2C总线,可以使各种设备的通信标准统一,对于厂家来说,使用成熟的方案可以缩短芯片设计周期、提高稳定性;对于应用者来说,使用通用的通信协议可以避免学习各种各样的自定义协议,降低了学习和应用的难度。
图10-5给出了I2C多机通信的示意图。可以看出:
- 所有I2C设备的SCL连在一起,SDA连在一起。
- 设备的SCL和SDA均要配置成开漏输出模式(高电平时引脚悬空,无上拉电阻)。
- SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右。
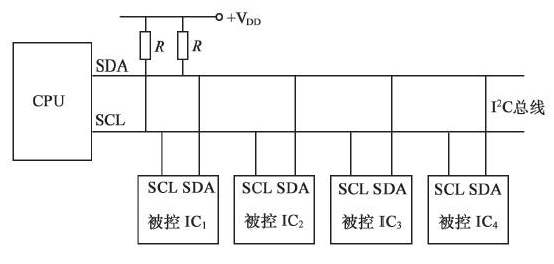
之所以这样设计,是因为开漏输出和上拉电阻的共同作用实现了“线与”的功能,可以解决多机通信互相干扰的问题。
10.1.4 AT24C02的数据帧
下面给出I2C数据帧中需要关注的6个关键问题:
- 起始条件:SCL高电平期间,SDA从高电平切换到低电平。
- 终止条件:SCL高电平期间,SDA从低电平切换到高电平。
- 发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位在前),然后拉高SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节。
- 接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位在前),然后拉高SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)。
- 发送应答:在接收完一个字节之后,主机在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答。
- 接收应答:在发送完一个字节之后,主机在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)。
可以看出,最重要的就是,SDA在SCL低电平由主机改变数据,SDA在高电平有从机读出数据。相比于FPGA中可以精细的控制SCL时钟,单片机并不是很在意SCL线周期是否稳定,只要高低电平对就行了。
下面介绍具体的数据帧结构。对于I2C通信来说,共有如下模式:
- 写模式:字节写、页写。
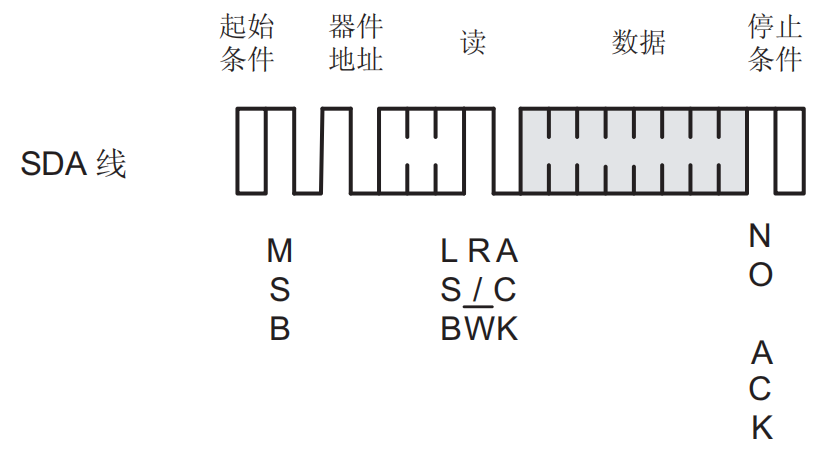
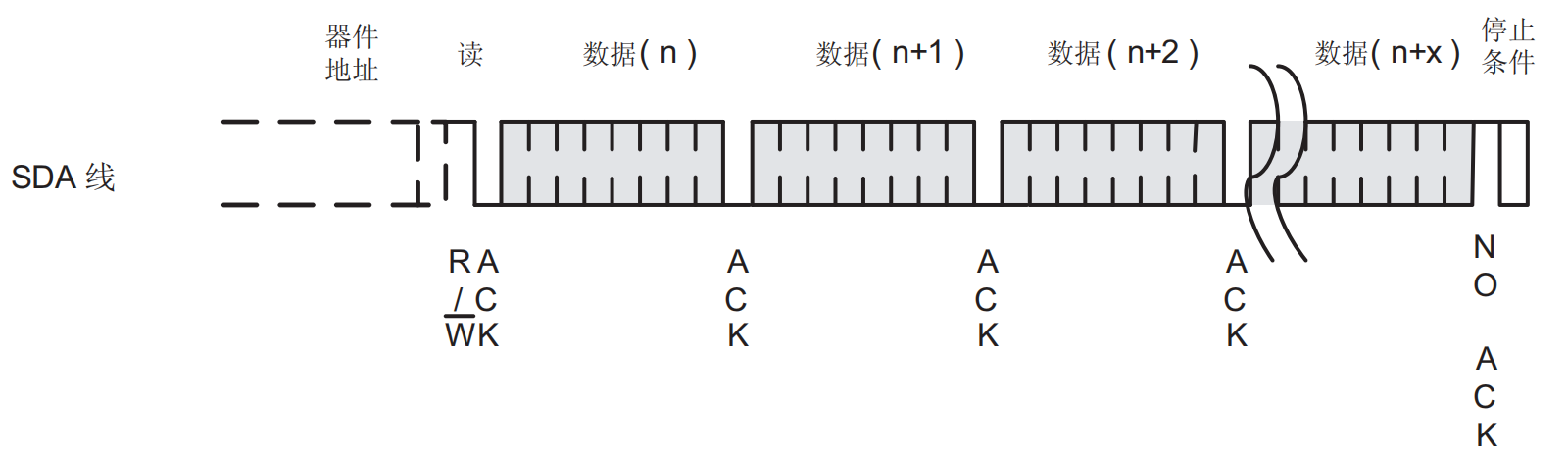
- 读模式:当前地址读、随机读、顺序读。
注:由于读模式中不能指定地址,所以“随机读”模式通过借鉴写模式,使用“哑写”改变当前的地址。
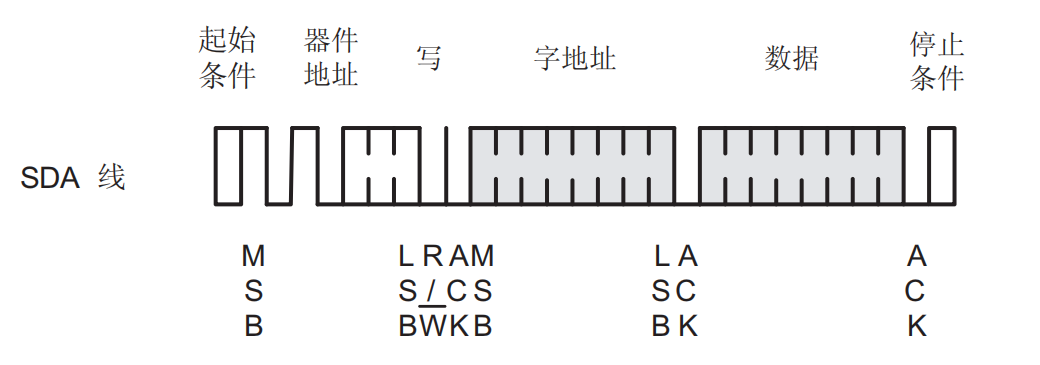
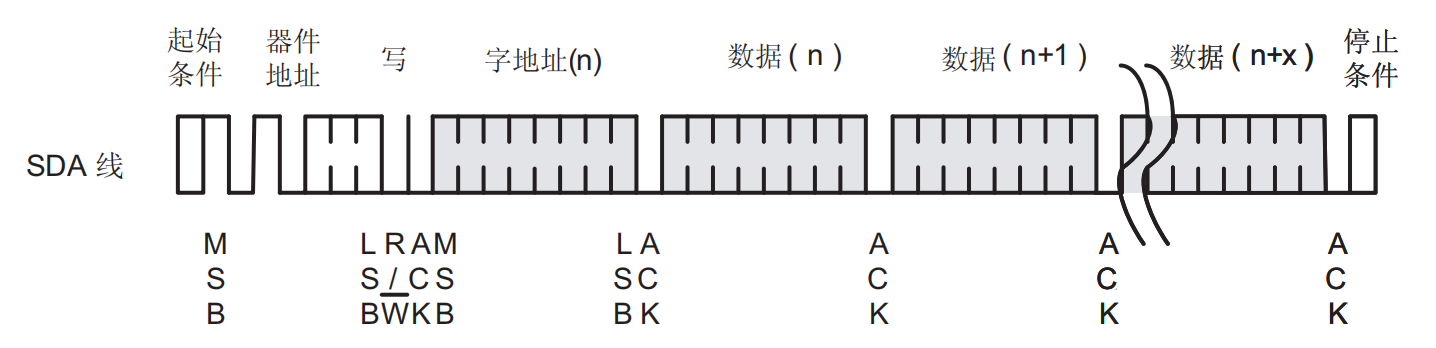
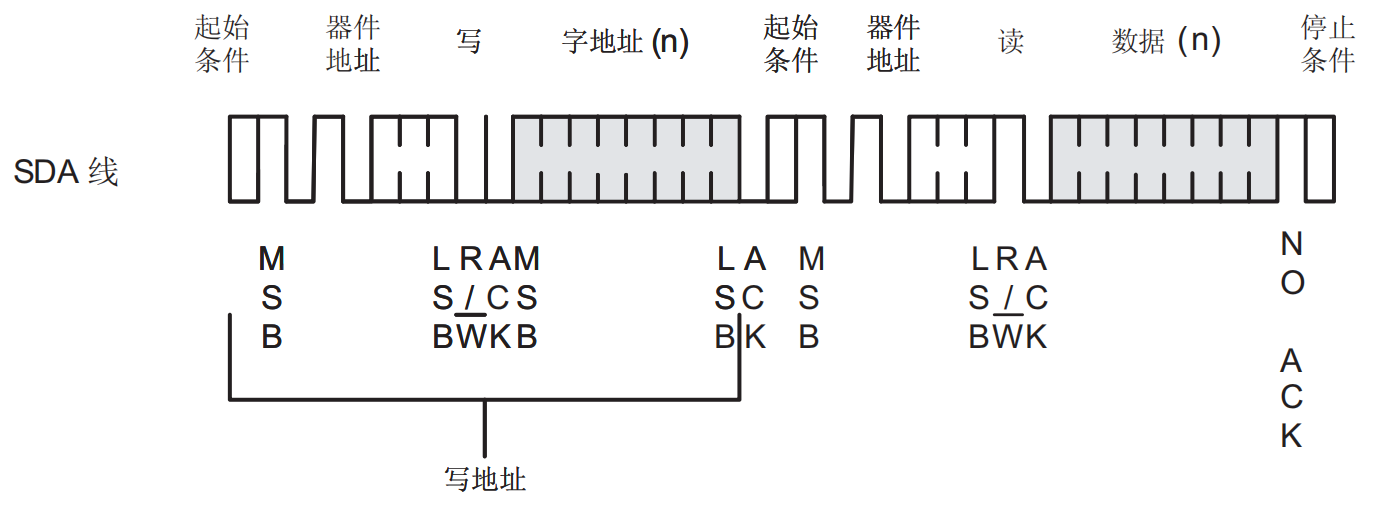
由于目前不需要大数据量的通信,且I2C一般用于控制信号的传输,所以可以不考虑传输效率的问题;此外,为了方便进行模块化编程,所以每次读/写都希望可以指定一个地址,于是采用“字节写”、“随机读”两种模式作为读写操作。注意这两种方式每次都只能读/写1字节的信息。注意每次传输的第一个字节为器件地址的相关信息,格式如下:

10.2 AT24C02数据存储
需求:在LCD1602上显示5位数据(unsigned int),使用按键进行操作:
- key1进行加一操作;
- key2进行减一操作;
- key3进行将此数据存储到EEPROM芯片(AT24C02)中;
- key4将其从EEPROM芯片中读出来。
注:为了验证是否存储到了EEPROM中,可以将开发板断电后,再从EEPROM芯片中读取数据进行验证。
代码展示:
- main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "PushKey.h"
#include "AT24C02.h"
void main(){
unsigned int num = 0;//要存储的数据
unsigned char num_H8, num_L8;//数据的高8位和低8位
unsigned char err1,err2;//表示操作的错误
unsigned char key;
//LCD初始化
LCD_Init();
//计算两个字节
num_H8 = num/256;
num_L8 = num%256;
while(1){
key = PushKey();
if(key){
switch(key){
case 1: //数据加一
num++;
num_H8 = num/256; num_L8 = num%256;
LCD_ShowString(2,1," ");
break;
case 2: //数据减一
num--;
num_H8 = num/256; num_L8 = num%256;
LCD_ShowString(2,1," ");
break;
case 3: //数据存储
err1 = AT24C02_WriteByte(0x02,num_H8);
err2 = AT24C02_WriteByte(0x03,num_L8);
if((!err1) && (!err2)){LCD_ShowString(2,1,"Write OK! ");}
else {LCD_ShowString(2,1,"Write ERR!");}
break;
case 4: //数据读取
num_H8 = AT24C02_ReadByte(0x02);
num_L8 = AT24C02_ReadByte(0x03);
num = num_H8*256 + num_L8;
LCD_ShowString(2,1,"Read OK!");
break;
default:;
}
}
LCD_ShowNum(1,1,num,5);
}
}
- AT24C02.h
#ifndef __AT24C02_H__
#define __AT24C02_H__
unsigned char AT24C02_WriteByte(unsigned char wr_addr,wr_byte);//字节写
unsigned char AT24C02_ReadByte(unsigned char rd_addr);//随机读
#endif
- AT24C02.c
#include <REGX52.H>
// 下面可能需要更改
/**********************************/
// 对常用总线重命名
sbit SCL = P2^1;
sbit SDA = P2^0;
# define AT24C02_WR_ADDR 0xa0
# define AT24C02_RD_ADDR 0xa1
// 等待写周期的延时函数
void AT24C02_Delay5ms(){//@11.0592MHz
unsigned char i, j;
i = 9;
j = 244;
do
{
while (--j);
} while (--i);
}
/**********************************/
// 固定格式的函数
/**********************************/
/**
* @brief :采用I2C“字节写”的方式,向AT24C02写入1字节数据。
* @param :wr_addr写入地址,wr_byte写入数据
* @retval :代表写入是否成功。
*/
unsigned char AT24C02_WriteByte(unsigned char wr_addr,wr_byte){
unsigned char err=0;
unsigned char i;
//起始条件
SDA = 1;
SCL = 1;
SDA = 0;
SCL = 0;
//发送第一字节数据
for(i=0;i<8;i++){
SCL = 0;
SDA = AT24C02_WR_ADDR&(0x80>>i);
SCL = 1;
}
//接收第一次应答
SCL = 0;
SDA= 1; //开漏输出,释放SDA
SCL = 1;
if(SDA){err=1;}
SCL = 0;
if(err){return err;}
//发送第二字节数据:地址
for(i=0;i<8;i++){
SCL = 0;
SDA = wr_addr&(0x80>>i);
SCL = 1;
}
//接收第二次应答
SCL = 0;
SDA= 1; //开漏输出,释放SDA
SCL = 1;
if(SDA){err=1;}
SCL = 0;
if(err){return err;}
//发送第三字节数据:数据
for(i=0;i<8;i++){
SCL = 0;
SDA = wr_byte&(0x80>>i);
SCL = 1;
}
//接收第三次应答
SCL = 0;
SDA= 1; //开漏输出,释放SDA
SCL = 1;
if(SDA){err=1;}
if(err){return err;}
//终止条件
SCL = 0;
SDA = 0;
SCL = 1;
SDA = 1;
//等待写周期完成
AT24C02_Delay5ms();
return err;
}
/**
* @brief :采用I2C“随机读”的方式,从AT24C02指定地址读出1字节数据。
* @param :rd_addr读出地址
* @retval :读出的数据。
* 一般读不要会出错,所以就不返回错误标志err了,但保留其定义。
*/
unsigned char AT24C02_ReadByte(unsigned char rd_addr){
unsigned char rd_byte = 0x00;
unsigned char err=0,wr_byte1=0xa0;
unsigned char i;
//起始条件
SDA = 1;
SCL = 1;
SDA = 0;
SCL = 0;
//发送第一字节数据
for(i=0;i<8;i++){
SCL = 0;
SDA = AT24C02_WR_ADDR&(0x80>>i);
SCL = 1;
}
//接收第一次应答
SCL = 0;
SDA= 1; //开漏输出,释放SDA
SCL = 1;
err = SDA;
//发送第二字节数据:地址
for(i=0;i<8;i++){
SCL = 0;
SDA = rd_addr&(0x80>>i);
SCL = 1;
}
//接收第二次应答
SCL = 0;
SDA= 1; //开漏输出,释放SDA
SCL = 1;
err = SDA;
SCL = 0;
//起始条件
SDA = 1;
SCL = 1;
SDA = 0;
SCL = 0;
//发送第一字节数据
for(i=0;i<8;i++){
SCL = 0;
SDA = AT24C02_RD_ADDR&(0x80>>i);
SCL = 1;
}
//接收第三次应答
SCL = 0;
SDA= 1; //开漏输出,释放SDA
SCL = 1;
err = SDA;
SCL = 0;
//接收数据:数据
for(i=0;i<8;i++){
SCL = 0;
if(SDA){rd_byte |= (0x80>>i);}
SCL = 1;
}
//NO ACK:主机对SDA无动作
SCL = 0;
SDA = 1;
SCL = 1;
SCL = 0;
//终止条件
SCL = 0;
SDA = 0;
SCL = 1;
SDA = 1;
return rd_byte;
}
- PushKey.h
#ifndef __PUSHKEY_H__
#define __PUSHKEY_H__
// 延时cycles ms,晶振@11.0592MHz
void PushKey_Delay(unsigned char cycles){
unsigned char i, j;
do{
i = 2;
j = 199;
do{
while (--j);
}while (--i);
}while(--cycles);
}
/**
* @brief :检测按下了哪个按键开关
* @param :无
* @retval :输出按键开关编号1~4,不按返回0,松开触发
*/
unsigned char PushKey(){
unsigned char key = 0;
if(!P3_1) {PushKey_Delay(10);while(!P3_1);PushKey_Delay(10);key=1;}
else if(!P3_0){PushKey_Delay(10);while(!P3_0);PushKey_Delay(10);key=2;}
else if(!P3_2){PushKey_Delay(10);while(!P3_2);PushKey_Delay(10);key=3;}
else if(!P3_3){PushKey_Delay(10);while(!P3_3);PushKey_Delay(10);key=4;}
return key;
}
#endif
- LCD1602.h、- LCD1602.c与第8节“8DS1302实时时钟”相同。
编程感想:
- 单片机软件编程不用精细的考虑SCL线的变化,为了保证SDA的正确性,即使上一个步骤已经有
SCL=0,下一个步骤的开始也可以再次执行SCL=0。- 卡了很久的bug:写操作时,第三个字节写数据其实是在“写地址”,不知怎么就一直没看出来。😅
- 卡了很久的bug:在说明书中提到,“字节写”结束后,EEPROM会进入写周期(大概5ms),直到内部写完成后才会响应新的请求。所以不能连续写两个字节!! 要给写周期留有一定的延时。
- 卡了很久的bug:在读取数据的过程中,此语句进行赋值可行
if(SDA){rd_byte |= (0x80>>i);},而后面这个语句则不可行rd_byte |= (SDA&(0x80>>i));!可见,软件编程中,跨位宽赋值时还是尽量用判断,避免位运算。
10.3 AT24C02秒表(定时器扫描按键及数码管)
本实验重点在于使用定时器扫描按键和数码管,而不是像之前一样采用软件延时,从而会陷入到死循环当中。
- 对于按键来说。设置一个静态全局变量,表示上一次按下的按键编号。每次中断计时(如20ms)来临时,进入按键检测子函数,看看当前是否为上升沿,从而更新静态全局变量。主函数每次请求按键,则返回这个静态全局变量。如果想在数码管上长久地看到这个按键,那就将其归零的过程放在返回函数中,而不是
PushKey_Loop()函数中。 - 对于数码管来说。设置一个8位静态全局数组,存储8个数码管所需要显示的数据。每次中断计时(如2ms)来临时,进入数码管刷新子函数。这个数码管刷新子函数只负责刷新数据缓冲区的数据(使用for保证每次只刷新一个数码管)。而对于这些数据的更改,则是在主函数中调用相应的函数实现。
需求:在数码管上显示秒表“时-分-秒”,并使用按键进行控制:
- key1进行开始/暂停功能;
- key2将当前时间清零;
- key3将当前的数据写入到EEPROM芯片(AT24C02)中;
- key4则从EEPROM中将数据读回来(需掉电验证)。
代码展示:
- main.c
#include <REGX52.H>
#include "Timer0.h"
#include "PushKey.h"
#include "NixieTube.h"
#include "AT24C02.h"
// 定义分/秒/10倍毫秒/秒表工作标志
unsigned char mins=0,secs=0,ms10=0,StopWatch_flag=0;
void main(){
unsigned char num_key=0;
//定时器T0初始化
Timer0_Init();
//数码管显示初始化
NixieTube_SetBuf(6,11);
NixieTube_SetBuf(3,11);
while(1){
num_key = PushKey_GetKey();
switch(num_key){
// 开始/暂停秒表
case 1:
StopWatch_flag = !StopWatch_flag;
break;
// 秒表归零
case 2:
ms10 = 0;
secs = 0;
mins = 0;
break;
// 将当前数据写入到EEPROM中
case 3:
AT24C02_WriteByte(0x00,ms10);
AT24C02_WriteByte(0x01,secs);
AT24C02_WriteByte(0x02,mins);
break;
// 从EEPROM读取当前数据
case 4:
ms10 = AT24C02_ReadByte(0x00);
secs = AT24C02_ReadByte(0x01);
mins = AT24C02_ReadByte(0x02);
break;
default:;
}
NixieTube_SetBuf(1,ms10%10);
NixieTube_SetBuf(2,ms10/10);
NixieTube_SetBuf(4,secs%10);
NixieTube_SetBuf(5,secs/10);
NixieTube_SetBuf(7,mins%10);
NixieTube_SetBuf(8,mins/10);
}
}
// 秒表更新函数
void StopWatch_Loop(void){
if(ms10>=99){
ms10 = 0;
if(secs>=59){
secs = 0;
if(mins>=59){mins=0;}
else {mins++;}
}
else{secs++;}
}
else{ms10++;}
}
// 定义定时器T0中断后要执行的动作
void Timer0_Routine() interrupt 1{
static unsigned int count1_T0,count2_T0,count3_T0; //中断次数
TH0 = 0xfc; TL0 = 0x66; // 恢复溢出周期,近似1ms
//数码管扫描
count1_T0++; //数码管使用的中断
if(count1_T0>1){
count1_T0 = 0;
NixieTube_Loop();
}
//按键扫描
count2_T0++; //按键使用的中断
if(count2_T0>20){
count2_T0 = 0;
PushKey_Loop();
}
//秒表计数
count3_T0++;
if(count3_T0>10){
count3_T0 = 0;
if(StopWatch_flag){StopWatch_Loop();}
}
}
- NixieTube.h
#ifndef __NIXIETUBE_H__
#define __NIXIETUBE_H__
// 数据缓冲区,注意每个数字显示的范围就是0~9
unsigned char NixieTube_buf[8] = {1,2,3,4,5,6,7,8};
// 给出数字0~9的定义(符合数组的索引),最后两个依次表示不显示/显示横杠
unsigned char NixieTube_number[12] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x40};
/**
* @brief :改变数码管数据缓冲区的数值。
* @param :index索引1~8,num数值0~11(10表示不显示,11表示横杠)
* @retval :无
*/
void NixieTube_SetBuf(unsigned char index,num){
NixieTube_buf[index-1] = num;
}
/**
* @brief :在指定数码管显示指定的数字。
* @param :led片选信号0~7,num表示显示的索引0~11
* @retval :无。
*/
void NixieTube_Signle(unsigned char led, unsigned char num){
// 给出选择的LED1~LED8的定义(实际上只用P2的2/3/4引脚)
unsigned char sel_led[8] = {0x00,0x04,0x08,0x0c,0x10,0x14,0x18,0x1c};
P0 = 0x00; // 数码管不显示,消影
P2 = sel_led[led]; // 选择数码管:LED1
P0 = NixieTube_number[num]; // 数码管显示
}
//定时器中断函数执行的数码管扫描函数,每次只扫描一个数码管
void NixieTube_Loop(void){
static unsigned char i=0;
NixieTube_Signle(i,NixieTube_buf[i]);
i++;
if(i>=8){i=0;}
}
#endif
- PushKey.h
#ifndef __PUSHKEY_H__
#define __PUSHKEY_H__
// 上一次按下的按键
unsigned char num_PushKey=0;
/**
* @brief :告诉主函数按下了哪个按键。
* @param :无
* @retval :按键编号1~4
*/
unsigned char PushKey_GetKey(void){
unsigned char temp;
temp = num_PushKey;
num_PushKey = 0;
return temp;
}
/**
* @brief :检测按下了哪个按键开关
* @param :无
* @retval :输出按键开关编号1~4,不按返回0,松开触发
*/
unsigned char PushKey_SingleDetect(void){
unsigned char key = 0;
if(!P3_1) {key=1;}
else if(!P3_0){key=2;}
else if(!P3_2){key=3;}
else if(!P3_3){key=4;}
return key;
}
//定时器中断函数执行的按键扫描函数
void PushKey_Loop(void){
static unsigned char state_last=0, state_curr=0;
state_last = state_curr;
state_curr = PushKey_SingleDetect();
if (state_last==1 && state_curr==0){num_PushKey=1;}
else if(state_last==2 && state_curr==0){num_PushKey=2;}
else if(state_last==3 && state_curr==0){num_PushKey=3;}
else if(state_last==4 && state_curr==0){num_PushKey=4;}
}
#endif
- Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__
#include <REGX52.H>
/**
* @brief :对定时器0进行初始化,初始化完成后定时器0即可正常工作。
* 注:对11.0592MHz进行12分频(脉冲周期1.0850694us)。
* 注:配置过程中,由于掉电复位后中断都默认不开启,所以只需配置定时器0
* 相关的寄存器即可,不要定义其他中断的寄存器,以保证程序的复用性。
*/
void Timer0_Init(){
// 配置定时器T0的相关寄存器
TMOD&=0xf0; TMOD|=0x01; // 选择T0的GATE=0/允许计数/模式1
// 上面这个方法目的是不干扰高四位,对低四位先清零再加值。
TF0 = 0; TR0 = 1; // 溢出标志位清空,运行控制位置1
TH0 = 0xfc; TL0 = 0x66; // 离溢出近似1ms
// 注:上面这个初值只在第一次溢出生效,后面都是从0开始计数。
// 配置中断寄存器
EA = 1; ET0 = 1; // 不屏蔽所有中断,允许T0溢出中断
PT0 = 0; // T0优先级保持默认,不写这句话也可以
}
/*中断函数模板
// 定义定时器T0中断后要执行的动作
void Timer0_Routine() interrupt 1{
static unsigned int count_T0; //中断次数
count_T0++; //更新中断次数
TH0 = 0xfc; TL0 = 0x66; // 恢复溢出周期,近似1ms
if(count_T0>500){
count_T0 = 0;
}
}
*/
#endif
AT24C02.h、AT24C02.c与上一小节的实验相同。
编程感想:
- 小bug:注意
static和const不要写混了。

![[oeasy]python0066_控制序列_光标位置设置_ESC_逃逸字符_CSI](https://img-blog.csdnimg.cn/img_convert/6115b00c1d0ec500a9d4ca2911d2562e.jpeg)