VL53L4CD TOF开发.4--单次测量(One-Shot)模式
- 概述
- 视频教学
- 样品申请
- 完整代码下载
- 实现demo
- 硬件准备
- 技术规格
- 系统框图
- 应用示意图
- 生成STM32CUBEMX
- 选择MCU
- 串口配置
- IIC配置
- XSHUT
- GPIO1
- X-CUBE-TOF1
- app_tof.c
- 详细解释
- 主程序
- 演示结果
概述
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
在现代嵌入式系统中,精确的距离测量和实时响应能力对于许多应用场景至关重要。VL53L4CD 是一款先进的飞行时间(Time-of-Flight, ToF)传感器,能够提供高精度的距离测量。本文介绍了如何基于VL53L4CD传感器实现连续测距,并通过配置检测阈值来优化系统的响应能力。
我们将详细讲解如何初始化VL53L4CD传感器,设置其测量参数和检测阈值,并实现中断配置以响应特定的测量条件。通过这种方式,系统能够在距离测量达到预设的阈值范围内触发中断,从而实现实时响应和高效数据处理。
视频教学
https://www.bilibili.com/video/BV19n4y1X7ba/
VL53L4CD TOF开发(4)----单次测量(One-Shot)模式
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
完整代码下载
实现demo
- 传感器初始化:介绍如何正确初始化 VL53L4CD 传感器,包括系统时钟配置和外设初始化。
- 传感器配置:讲解如何配置传感器的测量参数,包括测距模式、时间预算和环境光测量设置。
- 单次测量实现:演示如何启动传感器进行单次测量,获取测量结果,并在每次测量后停止传感器以准备下一次测量。
- 应用示例:提供一个实际的应用示例代码,展示如何在嵌入式系统中实现单次测量模式,并处理测量结果以适应具体应用需求。
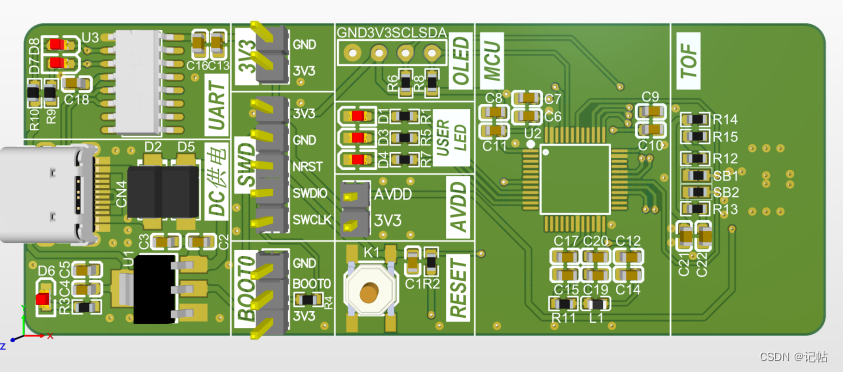
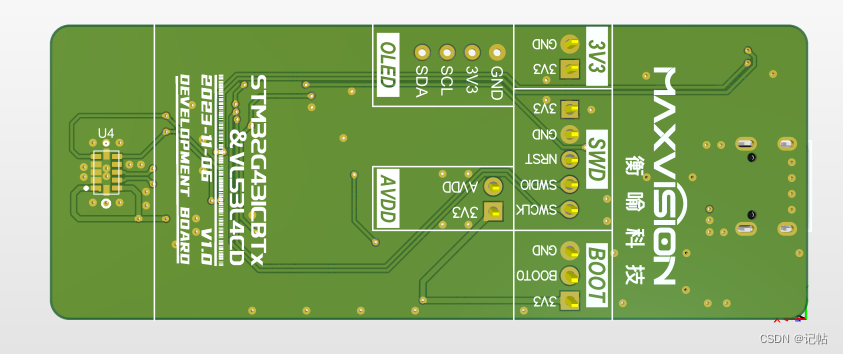
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
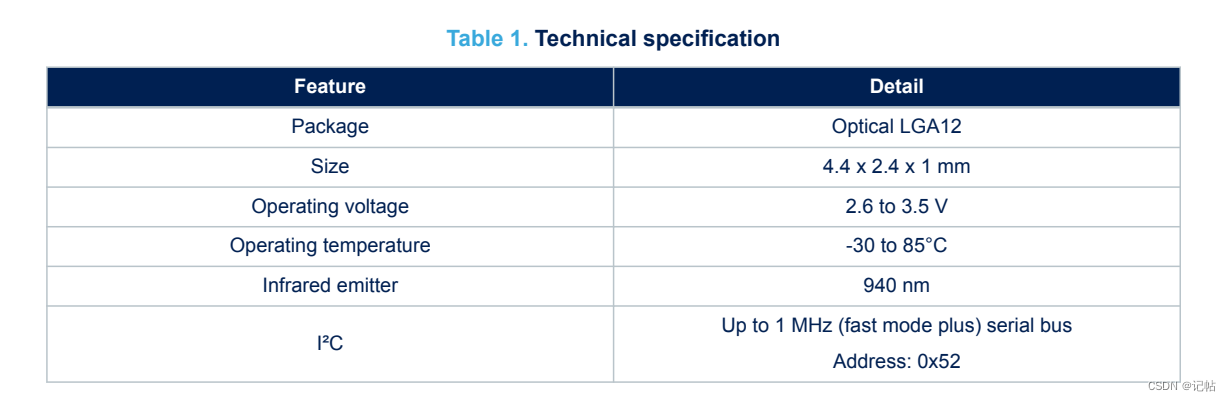
技术规格
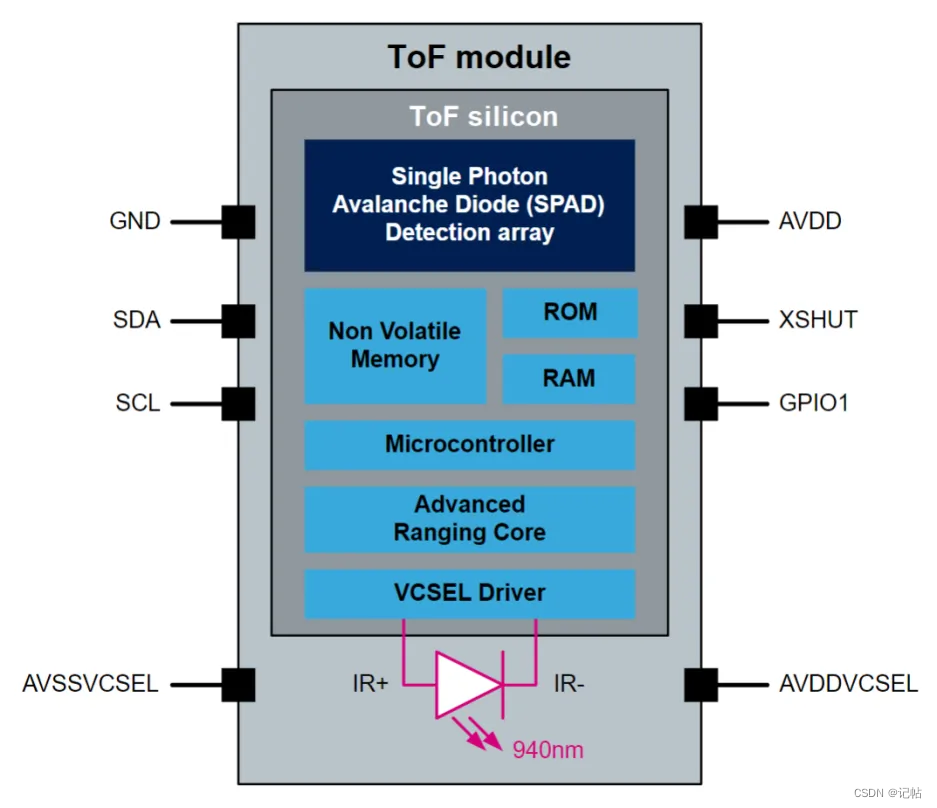
系统框图

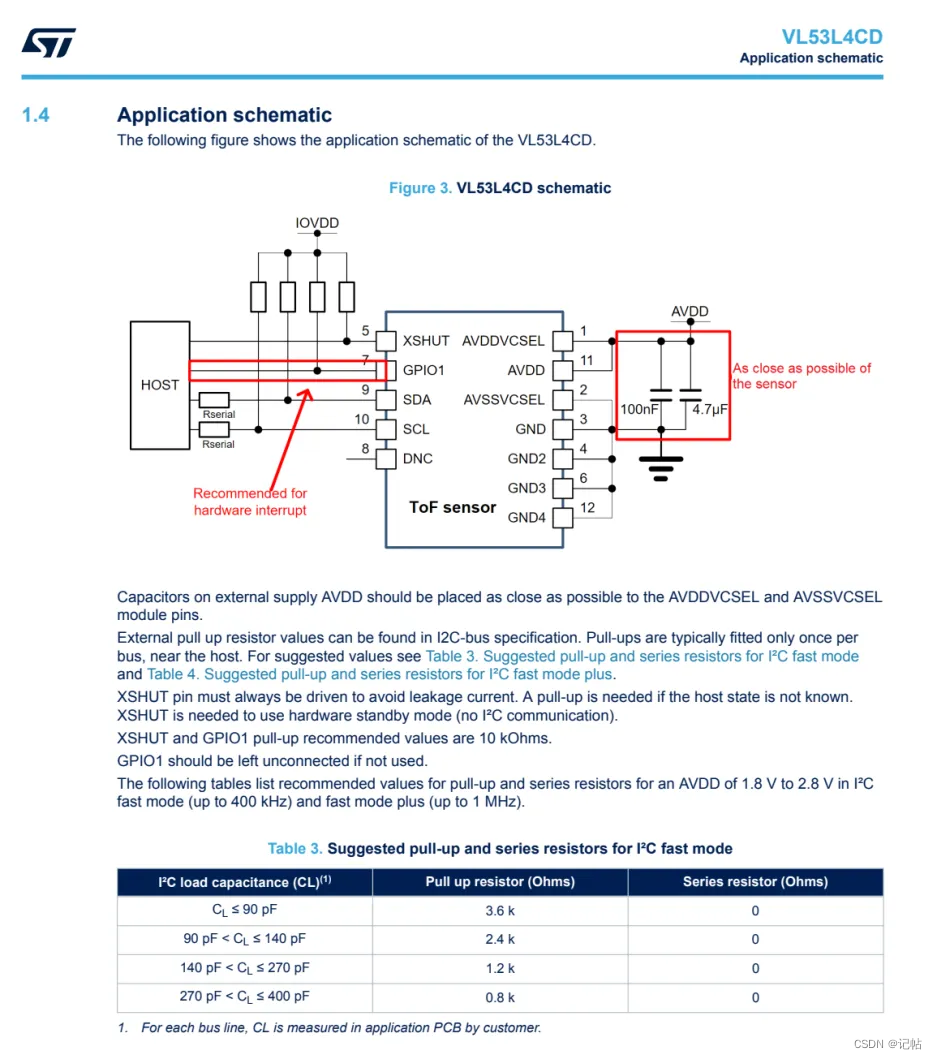
应用示意图
生成STM32CUBEMX
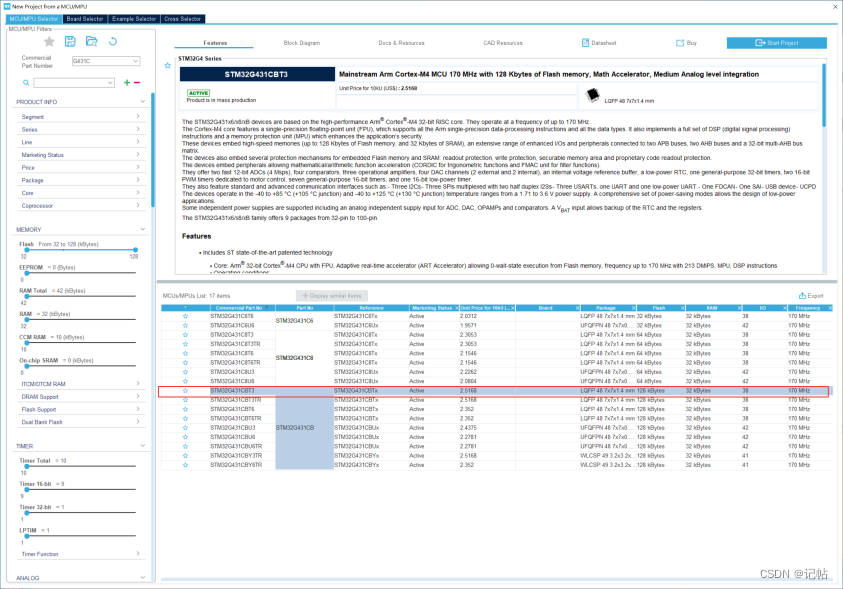
选择MCU
测试版所用的MCU为STM32G431CB。
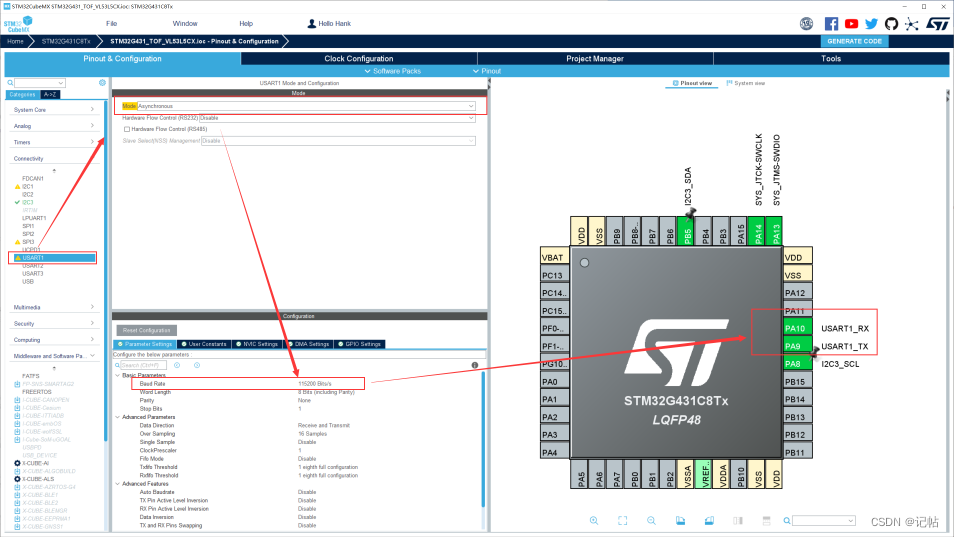
串口配置
查看原理图,PA9和PA10设置为开发板的串口。
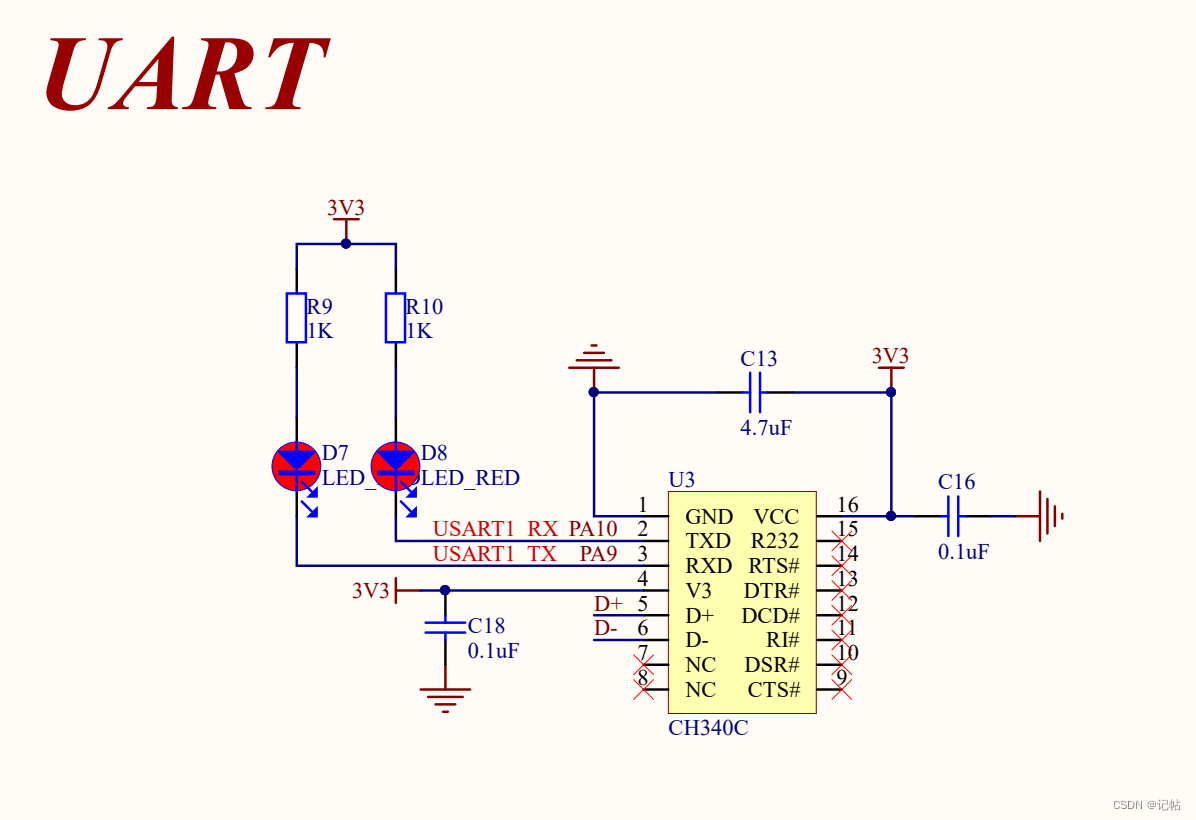
配置串口。
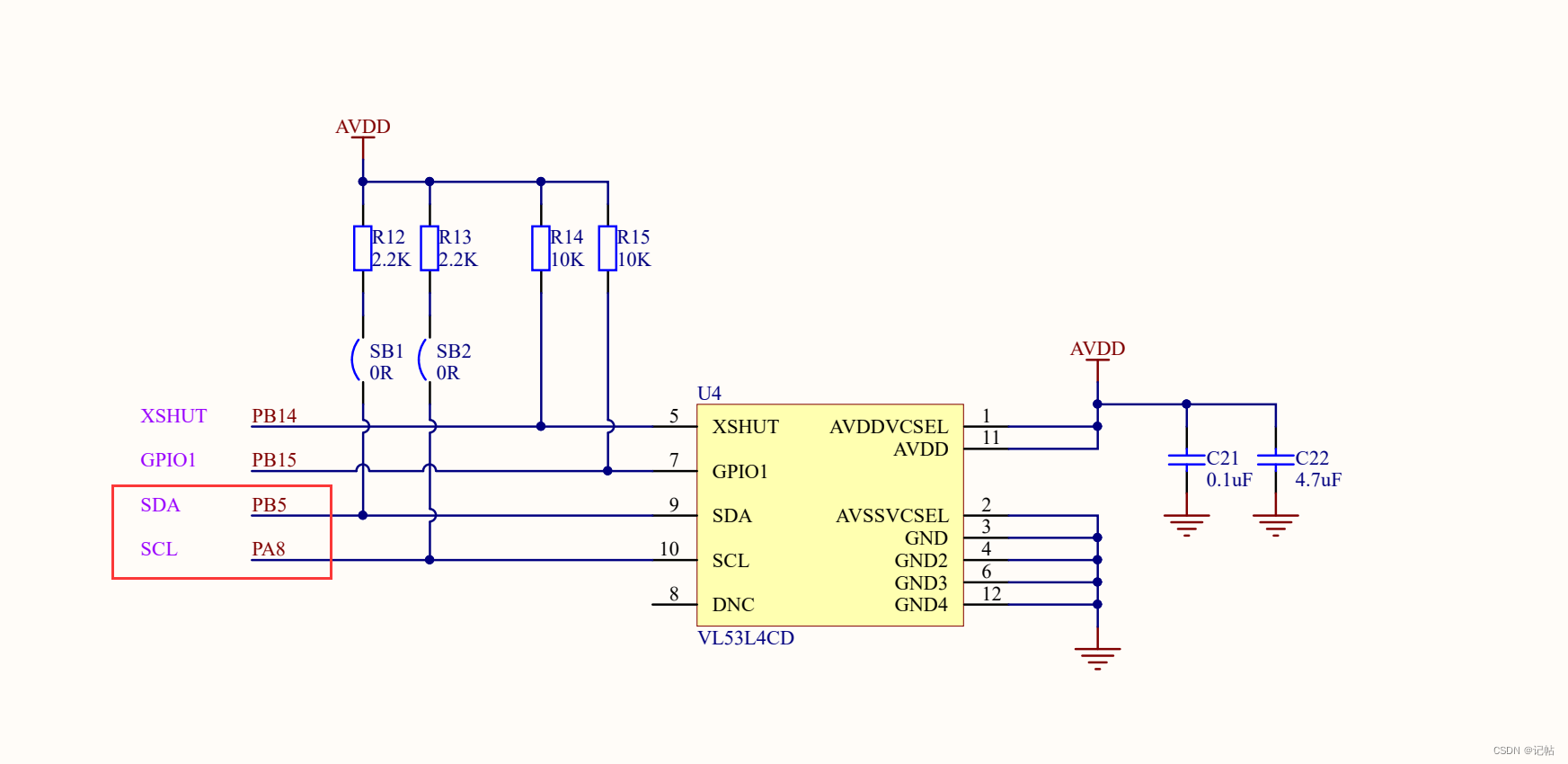
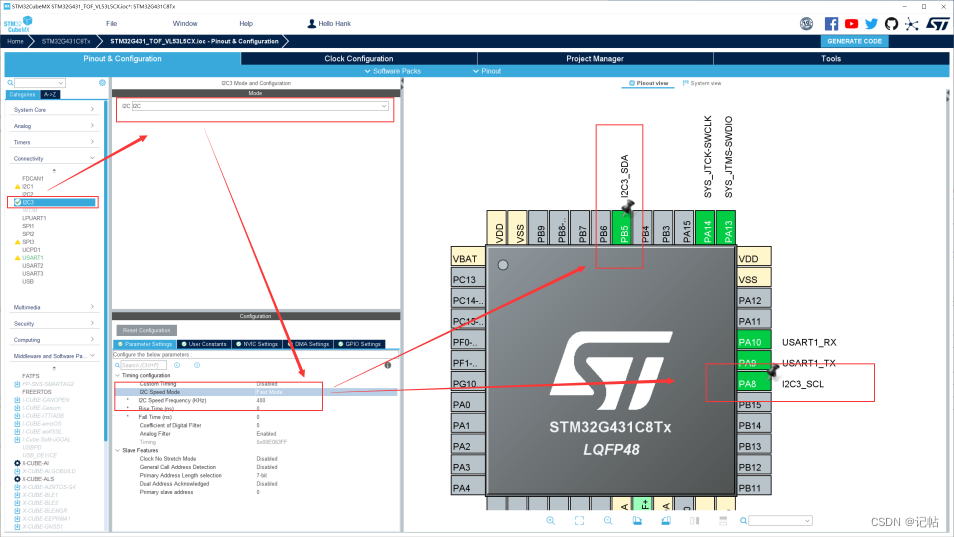
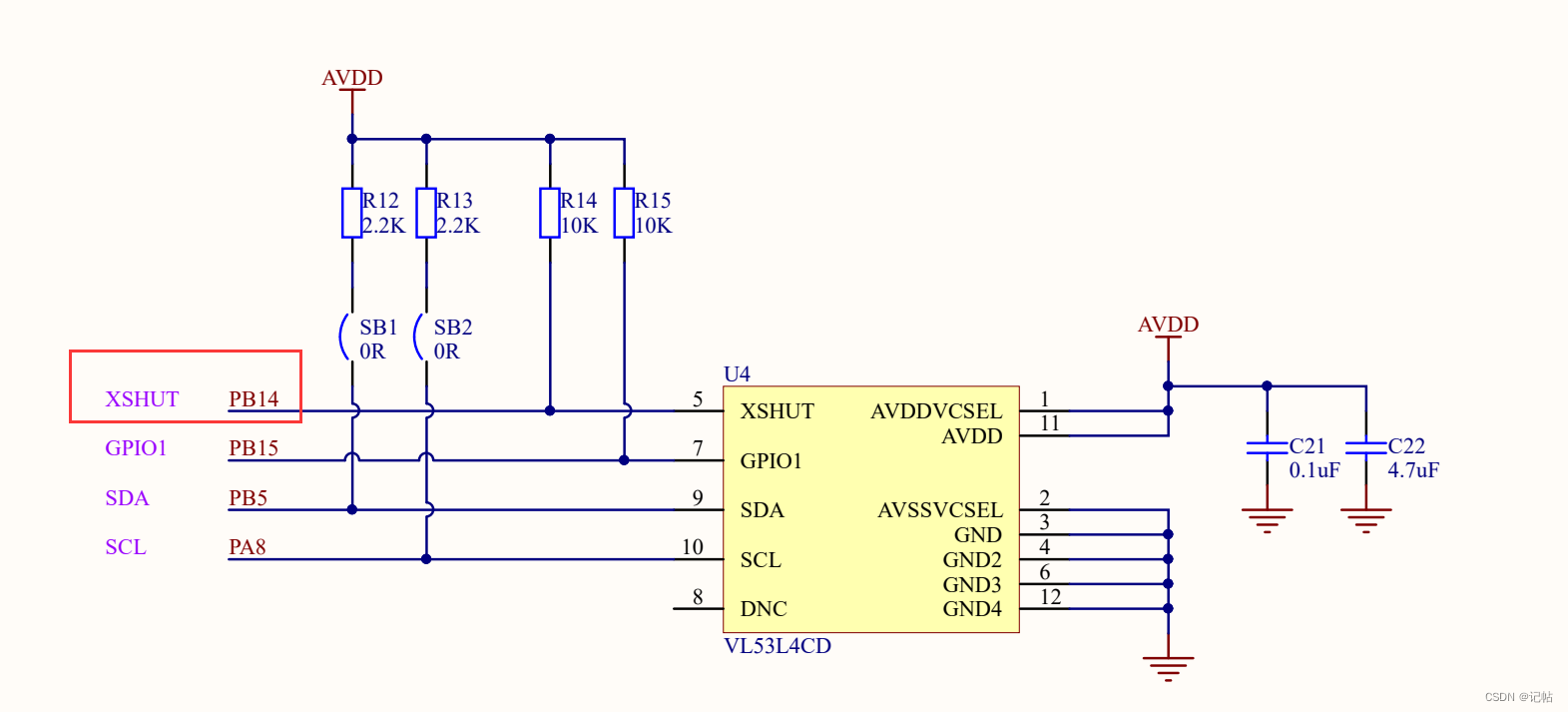
IIC配置
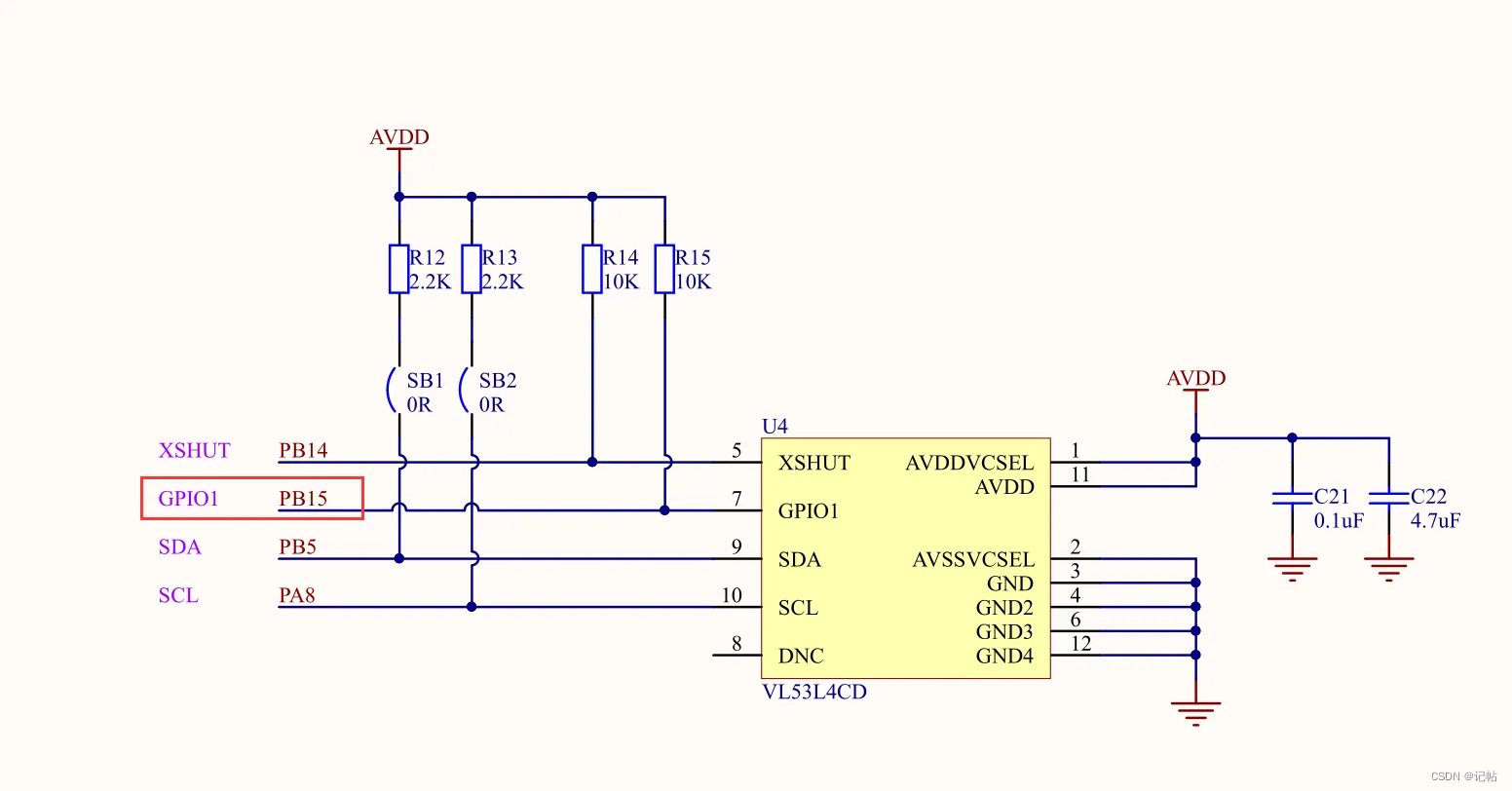
在这个应用中,VL53L4CD模块通过I2C(IIC)接口与主控器通信。具体来说,VL53L4CD模块的I2C引脚连接到主控器的PA8和PB5两个IO口。
配置IIC为快速模式,速度为400k。
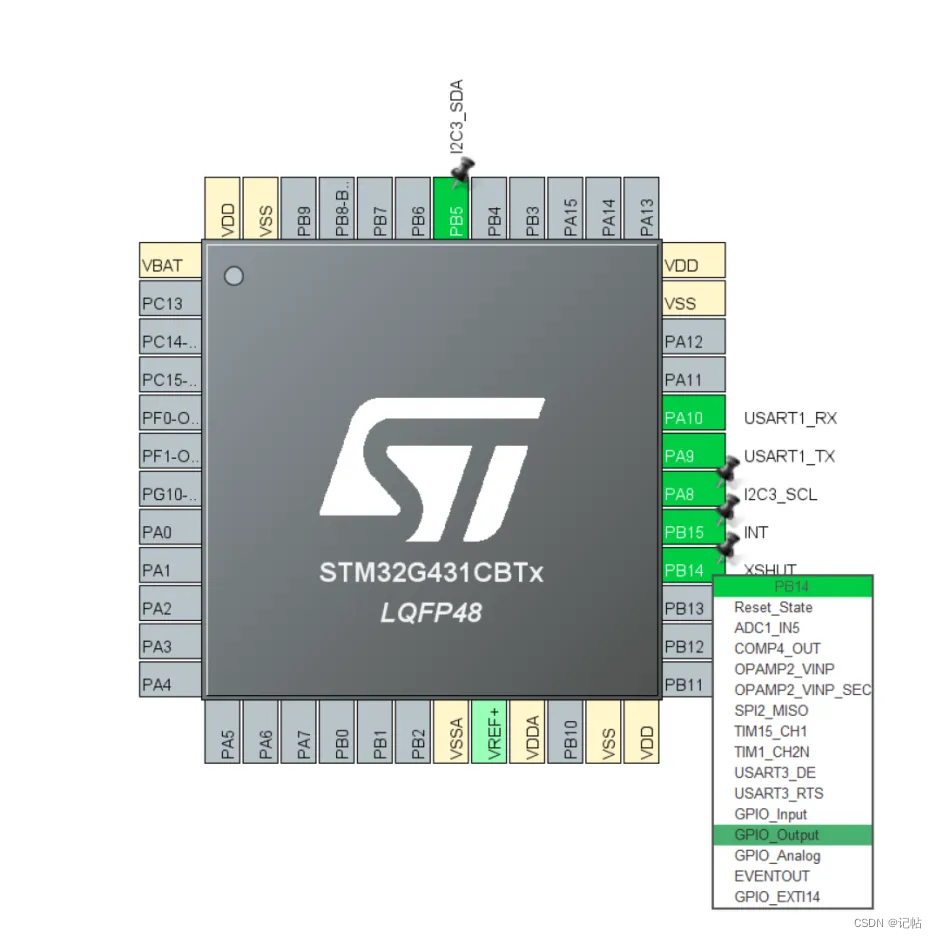
XSHUT
XSHUT引脚是由主机连接和控制的,这种设计优化了功耗,因为设备在不使用时可以被完全关闭,然后通过主机使用XSHUT引脚来唤醒。当AVDD存在且XSHUT为低电平时,设备处于硬件待机模式(HW Standby mode)。如果XSHUT引脚不由主机控制,而是通过上拉电阻连接到AVDD,那么设备在固件启动(FW BOOT)后会自动进入软件待机(SW STANDBY),而不会进入硬件待机。
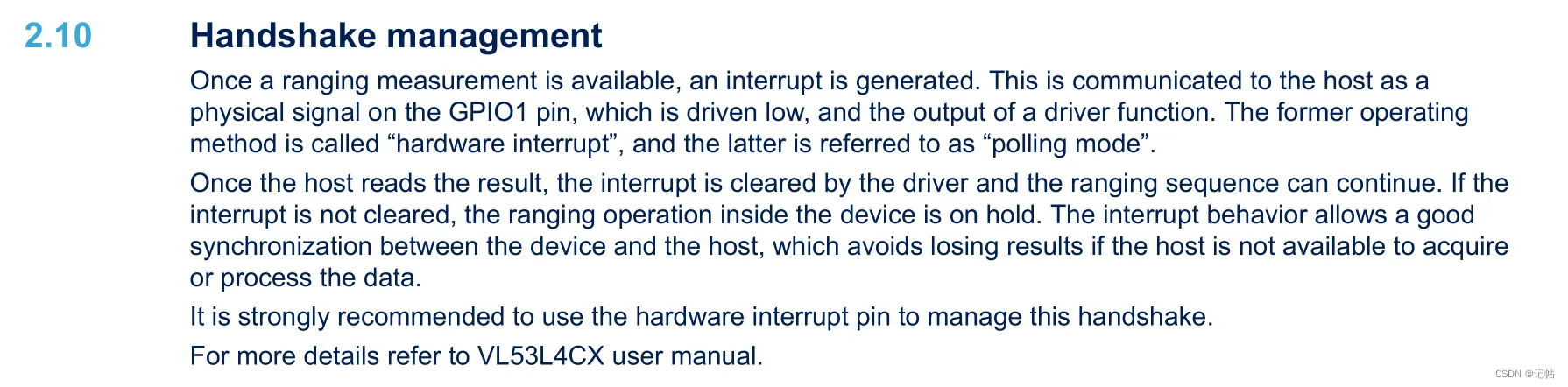
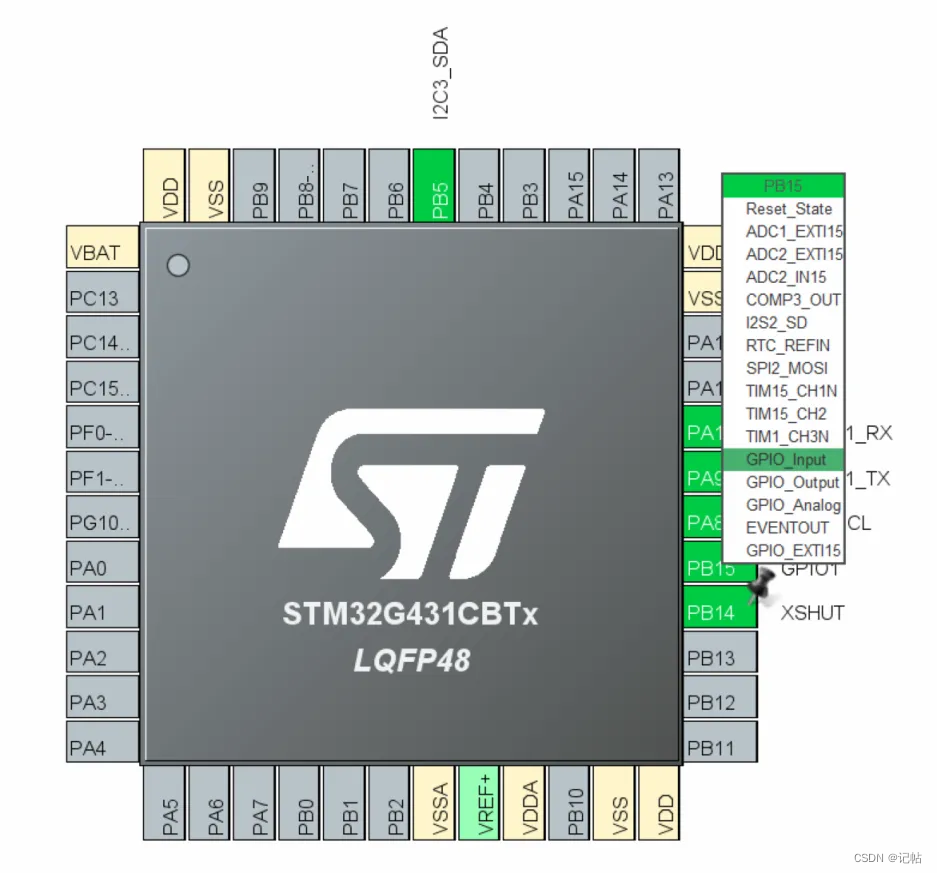
GPIO1
当传感器完成一次测距操作时,GPIO1引脚可以被配置为输出中断信号,通知微控制器读取测量结果。
这种方式比持续轮询传感器状态更加高效,尤其在低功耗应用中非常有用。
X-CUBE-TOF1
本节介绍在不需要使用样例应用时如何使用STM32CubeMX将X-CUBE-TOF1软件包添加到项目中。有了这样的设置,就只配置了驱动层。

app_tof.c
app_tof.c定义了一个静态函数 MX_VL53L4CD_SimpleRanging_Process,用于配置和执行VL53L4CX传感器的简单测距操作。
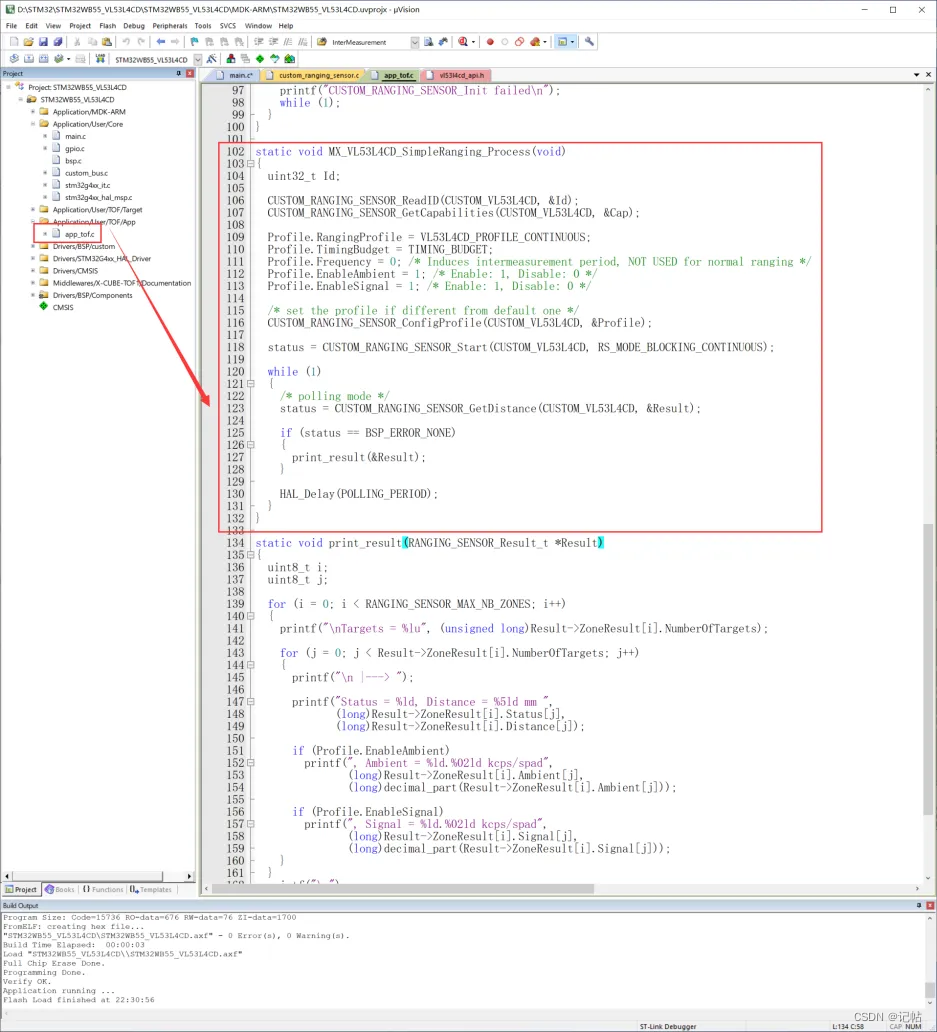
详细解释
- CUSTOM_RANGING_SENSOR_ReadID(CUSTOM_VL53L4CD, &Id);:
○ 读取传感器的ID,并将其存储在变量 Id 中。 - CUSTOM_RANGING_SENSOR_GetCapabilities(CUSTOM_VL53L4CD, &Cap);:
○ 获取传感器的能力,并将其存储在 Cap 结构中。 - 配置 Profile 结构的参数:
○ Profile.RangingProfile 设置测距模式。
○ Profile.TimingBudget 设置测量时间预算。
○ Profile.Frequency 设置为0,不用于正常测距。
○ Profile.EnableAmbient 启用环境光测量。
○ Profile.EnableSignal 启用信号测量。 - CUSTOM_RANGING_SENSOR_ConfigProfile(CUSTOM_VL53L4CD, &Profile);:
○ 如果配置文件与默认配置不同,则应用新的配置文件。 - CUSTOM_RANGING_SENSOR_Start(CUSTOM_VL53L4CD, RS_MODE_BLOCKING_CONTINUOUS);:
○ 启动传感器,设置为阻塞连续测量模式。 - while (1) 循环:
○ 在无限循环中,定期读取传感器的距离数据。
○ 如果成功读取距离数据,则调用 print_result(&Result) 打印结果。
○ 使用 HAL_Delay(POLLING_PERIOD) 延迟一段时间,以控制轮询频率。
main.c种添加头文件。
/* USER CODE BEGIN Includes */
#include "app_tof.h"
#include "custom_ranging_sensor.h"
/* USER CODE END Includes */
添加对应变量。
/* USER CODE BEGIN 0 */
#define TIMING_BUDGET (200U) /* 8 ms < TimingBudget < 200 ms */
#define POLLING_PERIOD (250U) /* refresh rate for polling mode (ms, shall be consistent with TimingBudget value) */
static RANGING_SENSOR_Capabilities_t Cap;
static RANGING_SENSOR_ProfileConfig_t Profile;
static RANGING_SENSOR_Result_t Result;
static int32_t status = 0;
static void print_result(RANGING_SENSOR_Result_t *Result);
static int32_t decimal_part(float_t x);
/* USER CODE END 0 */
修改 Profile.RangingProfile 为自主测量模式,同事开启单次测量。
/* USER CODE BEGIN 2 */
uint32_t Id;
CUSTOM_RANGING_SENSOR_ReadID(CUSTOM_VL53L4CD, &Id);// 读取传感器ID并存储在Id变量中
CUSTOM_RANGING_SENSOR_GetCapabilities(CUSTOM_VL53L4CD, &Cap);// 获取传感器的能力并存储在Cap变量中
Profile.RangingProfile = VL53L4CD_PROFILE_AUTONOMOUS;// 设置测距配置文件为自主测量模式
Profile.TimingBudget = TIMING_BUDGET;// 设置测距的时间预算(以毫秒为单位)
Profile.Frequency = 0; // 设置测量频率为0,这意味着使用测量之间的间隔时间,而不是连续测量
Profile.EnableAmbient = 1; // 启用环境光测量
Profile.EnableSignal = 1; // 启用信号测量
// 如果配置文件与默认配置文件不同,则应用新的配置文件
CUSTOM_RANGING_SENSOR_ConfigProfile(CUSTOM_VL53L4CD, &Profile);
// 启动传感器进行单次测量
status = CUSTOM_RANGING_SENSOR_Start(CUSTOM_VL53L4CD, RS_MODE_BLOCKING_ONESHOT);
/* USER CODE END 2 */
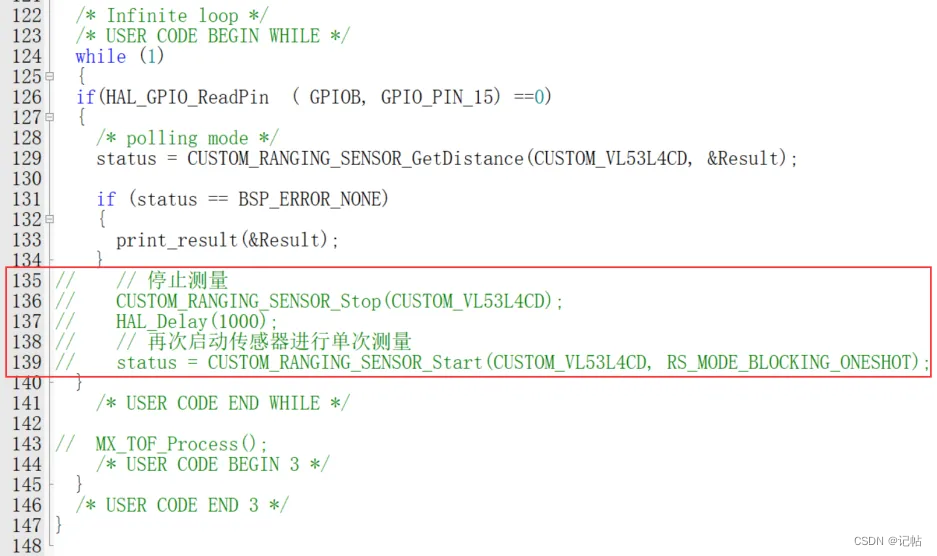
主程序
轮询方式检测 GPIO 引脚状态,并在满足条件时获取 VL53L4CD 传感器的测距结果并进行处理。
检查 GPIO 引脚状态,当 GPIO 引脚状态为低电平(表示测量完成且数据已准备好)时,进行以下操作:
● 调用 CUSTOM_RANGING_SENSOR_GetDistance(CUSTOM_VL53L4CD, &Result); 获取测距结果。
● 如果测量成功,调用 print_result(&Result); 打印测距结果。
● 停止当前测量以准备下一次测量。
● 再次启动单次测量。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(HAL_GPIO_ReadPin ( GPIOB, GPIO_PIN_15) ==0)
{
/* polling mode */
status = CUSTOM_RANGING_SENSOR_GetDistance(CUSTOM_VL53L4CD, &Result);
if (status == BSP_ERROR_NONE)
{
print_result(&Result);
}
// 停止测量
CUSTOM_RANGING_SENSOR_Stop(CUSTOM_VL53L4CD);
HAL_Delay(1000);
// 再次启动传感器进行单次测量
status = CUSTOM_RANGING_SENSOR_Start(CUSTOM_VL53L4CD, RS_MODE_BLOCKING_ONESHOT);
}
/* USER CODE END WHILE */
// MX_TOF_Process();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
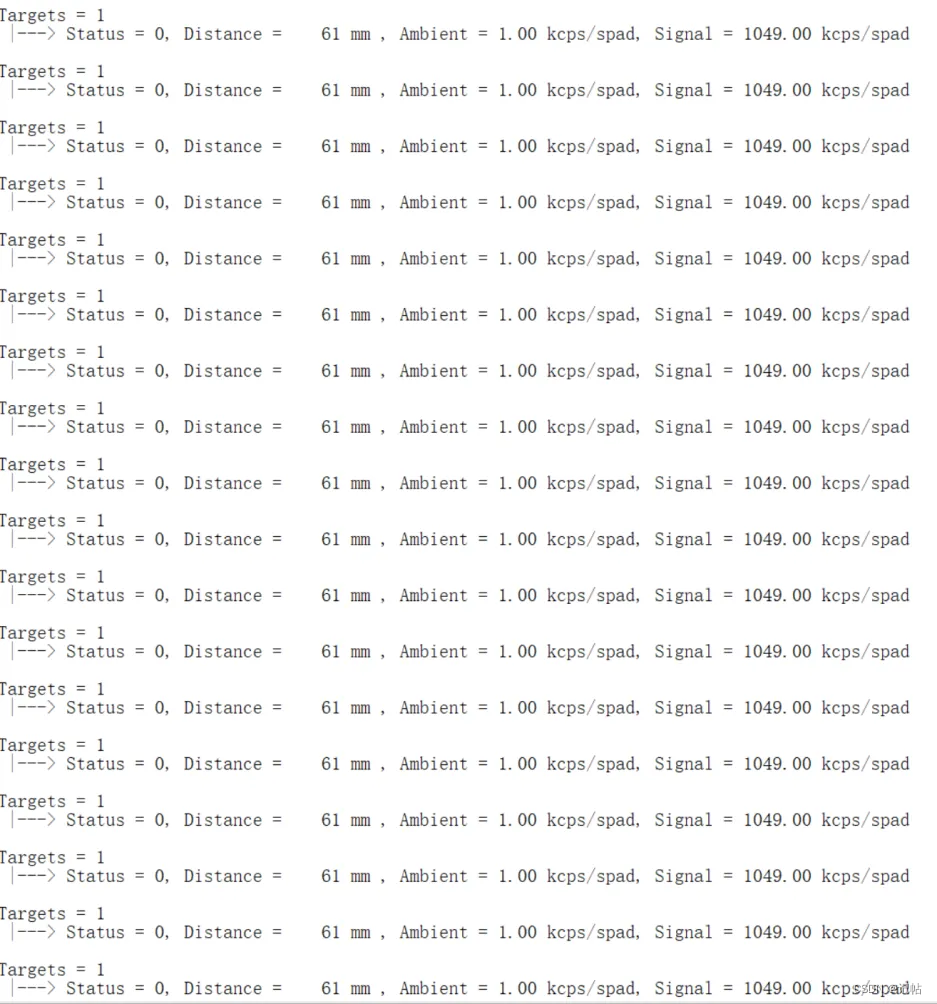
演示结果
配置成功,数据可以正常打印。
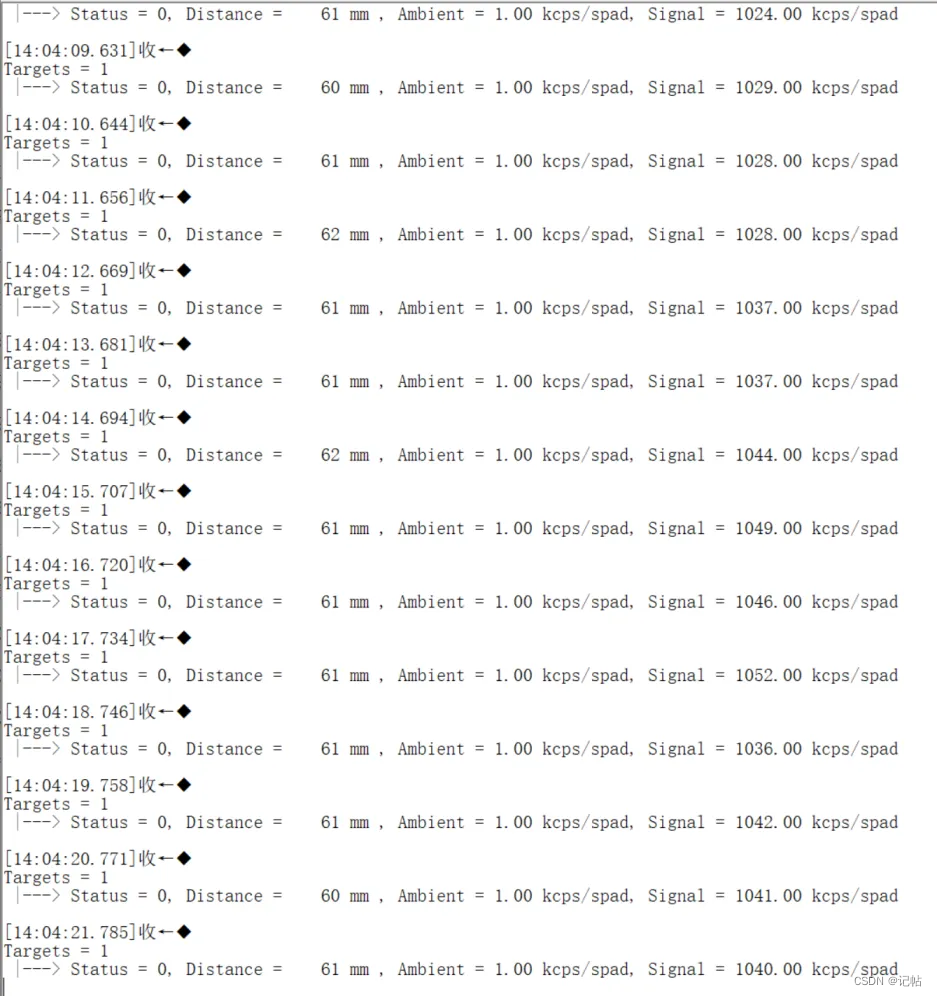
若对部分代码进行注释,可以查看到测距只执行一次,可以判断当前已经进入单次模式。










![[数据集][目标检测]减速区域检测数据集VOC+YOLO格式1654张1类别](https://img-blog.csdnimg.cn/direct/bde4fdd8db7d4bfe86e36b8ea23afcbd.png)