1. 前言:
我们在对系统进行建模的时候,为了减少计算量,一般都将系统简化为线性的,系统如果有约束,也是将约束简化为线性的;
因此本篇博客只针对两种常见系统模型的 MPC 问题进行求解:
- 线性系统 + 无约束
- 线性系统 + 线性约束
a
a
a
a
2. 线性系统 + 无约束的 MPC 问题求解
目前已知:
- 目标(代价)函数:
- 矩阵
,
,
均为正定矩阵;
- 线性系统状态空间方程:
- 当前时间步 k = 0 时系统的初始状态量:
注:代价函数和状态空间方程中的状态量 x 已经是误差量了;
a
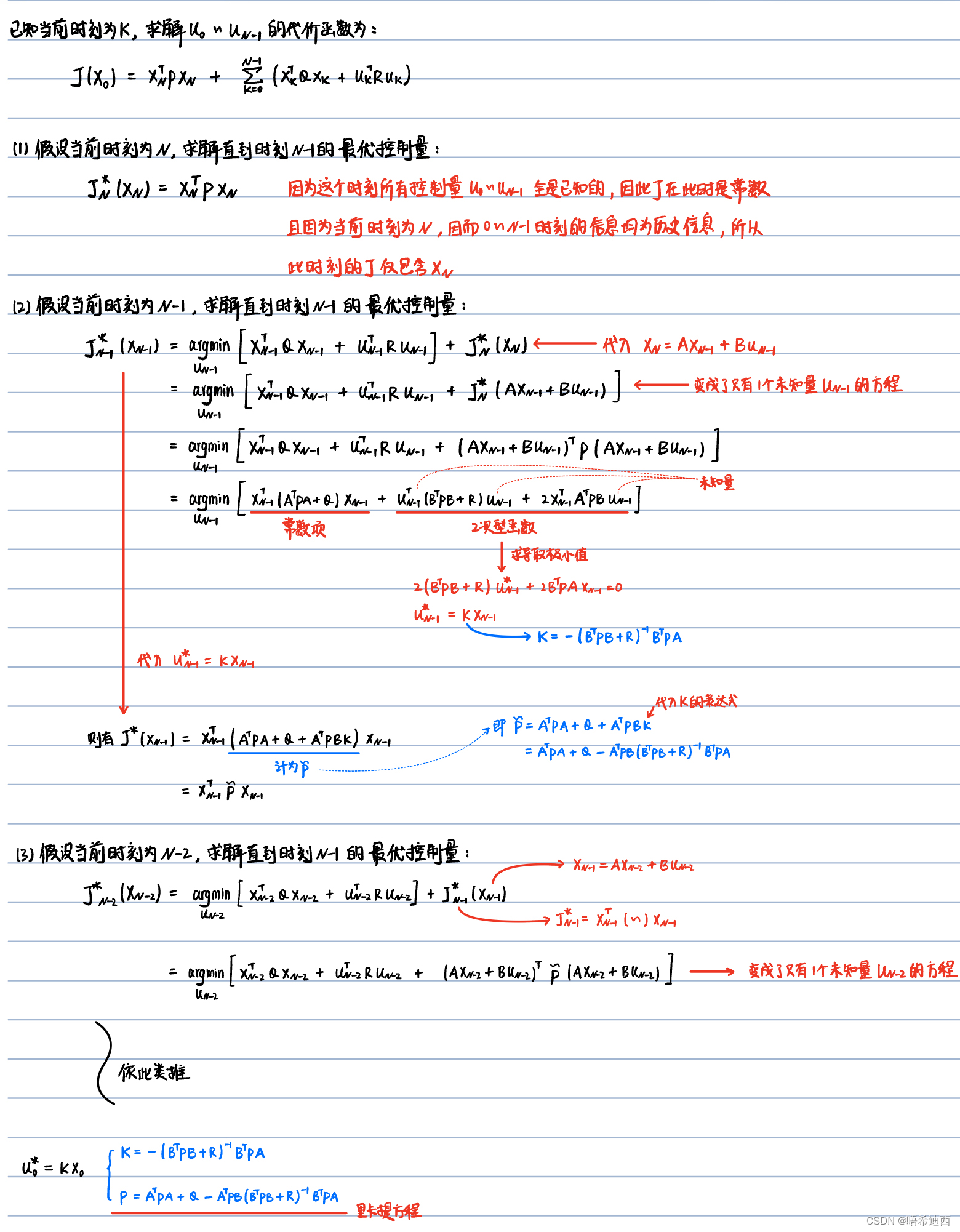
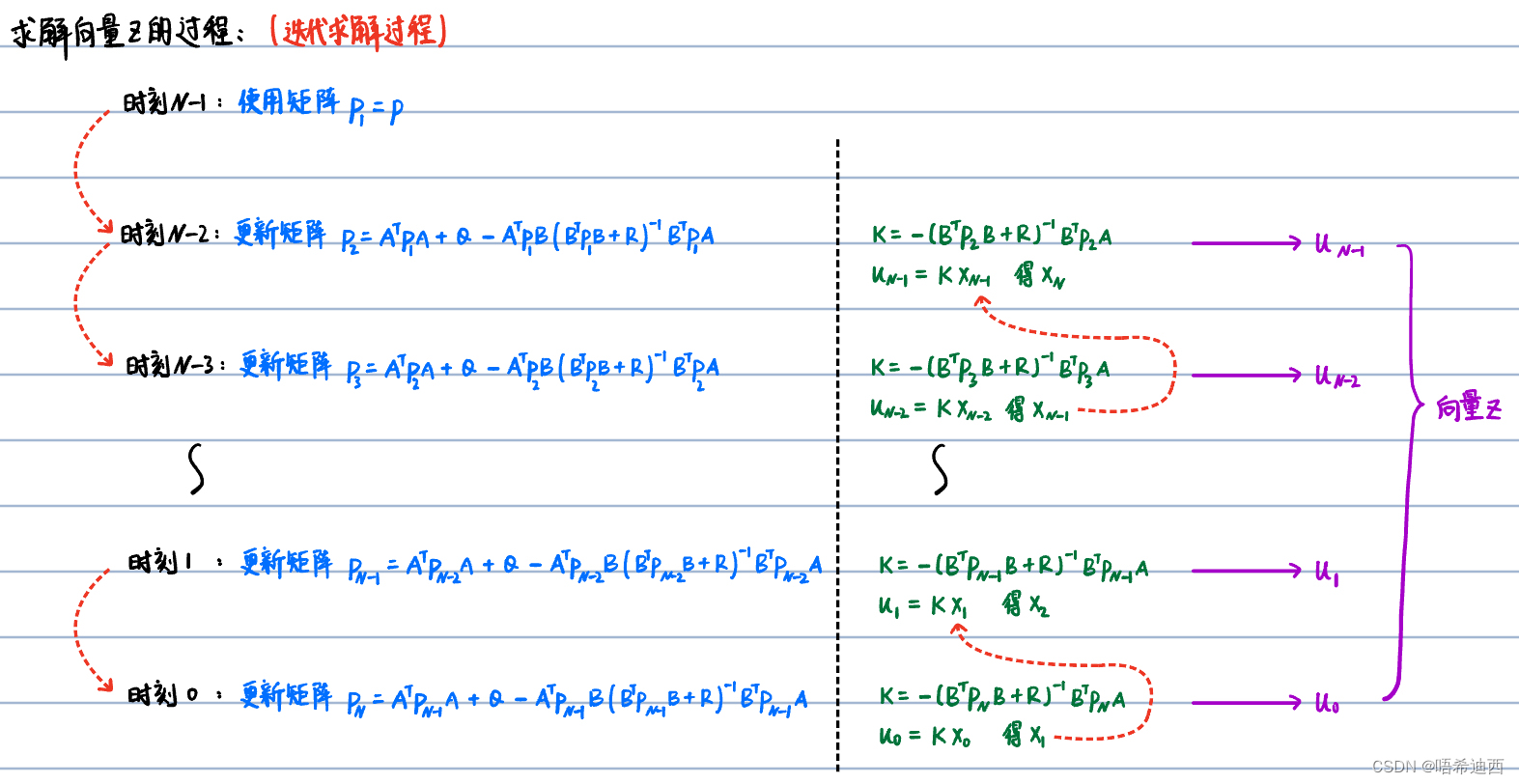
求解方法:
- 动态规划(针对无约束的问题,根本不需要使用到二次规划,直接使用动态规划即可求解)
a
进行求解:
a
a
a
a
3. 线性系统 + 线性约束的 MPC 问题求解
目前已知:
- 目标(代价)函数:
- 矩阵
均为正定矩阵;
- 线性系统状态空间方程:
- 当前时间步 k = 0 时的初始状态量:
- 系统的目标状态值:
- 线性约束条件:
- 线性等式约束:
- 线性不等式约束:
- 线性等式约束:
注:代价函数和状态空间方程中的 x 并不是误差量,才是误差量;
a
求解方法:
- 二次规划
- 解释:因为系统带了约束,所以动态规划方法已经不好使了,这种方法无法处理带有约束条件的问题,而二次规划方法可以用来处理带有约束条件的问题,所以需要我们将问题等价转换为二次规划的形式,再调用 OSQP 求解;
3.1 将问题转化为二次规划的形式
(1)目标:

(2)代价函数的转化过程:

(3)约束条件转化:

参考文章:LQR、MPC以及osqp库_osqp mpc-CSDN博客
3.2 使用 OSQP-Egine 库求解二次规划问题
- 原始问题:

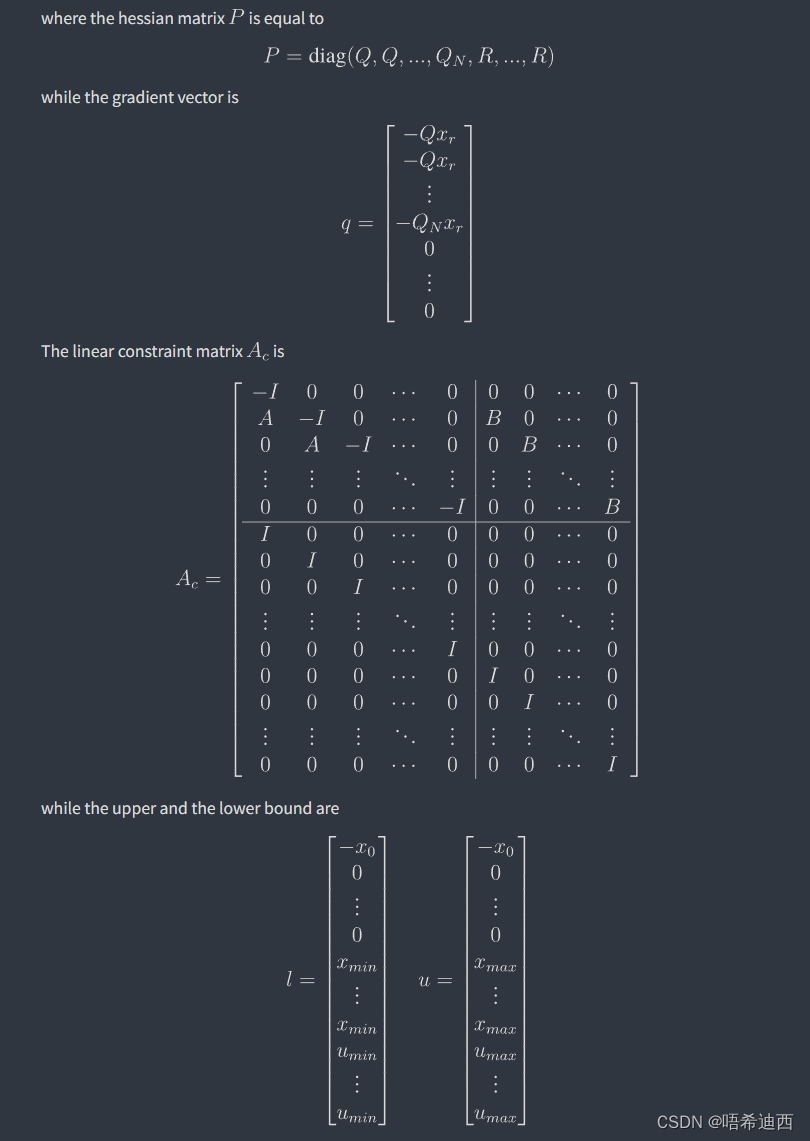
- QP 问题:

- QP 问题中涉及的矩阵和向量:
a
a
- 代码:
#include "OsqpEigen/OsqpEigen.h" // osqp-eigen
#include <Eigen/Dense> // eigen
#include <iostream>
// 函数作用:对矩阵 A / B 赋值
// 注意:这个函数根据自己实际的需要进行赋值
void setDynamicsMatrices(Eigen::Matrix<double, 12, 12>& a, Eigen::Matrix<double, 12, 4>& b) {
a << 1., 0., 0., 0., 0., 0., 0.1, 0., 0., 0., 0., 0., 0., 1., 0., 0., 0., 0., 0., 0.1, 0., 0.,
0., 0., 0., 0., 1., 0., 0., 0., 0., 0., 0.1, 0., 0., 0., 0.0488, 0., 0., 1., 0., 0., 0.0016,
0., 0., 0.0992, 0., 0., 0., -0.0488, 0., 0., 1., 0., 0., -0.0016, 0., 0., 0.0992, 0., 0.,
0., 0., 0., 0., 1., 0., 0., 0., 0., 0., 0.0992, 0., 0., 0., 0., 0., 0., 1., 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0., 0., 0., 1., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 1., 0.,
0., 0., 0.9734, 0., 0., 0., 0., 0., 0.0488, 0., 0., 0.9846, 0., 0., 0., -0.9734, 0., 0., 0.,
0., 0., -0.0488, 0., 0., 0.9846, 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.9846;
b << 0., -0.0726, 0., 0.0726, -0.0726, 0., 0.0726, 0., -0.0152, 0.0152, -0.0152, 0.0152, -0.,
-0.0006, -0., 0.0006, 0.0006, 0., -0.0006, 0.0000, 0.0106, 0.0106, 0.0106, 0.0106, 0,
-1.4512, 0., 1.4512, -1.4512, 0., 1.4512, 0., -0.3049, 0.3049, -0.3049, 0.3049, -0.,
-0.0236, 0., 0.0236, 0.0236, 0., -0.0236, 0., 0.2107, 0.2107, 0.2107, 0.2107;
}
// 函数作用:对向量 x_min / x_max / u_min / u_max 赋值
// 注意:这个函数根据自己实际的需要进行赋值
void setInequalityConstraints(Eigen::Matrix<double, 12, 1>& xMax,
Eigen::Matrix<double, 12, 1>& xMin,
Eigen::Matrix<double, 4, 1>& uMax,
Eigen::Matrix<double, 4, 1>& uMin) {
// 注意:因为 MPC 输出的当前时刻控制量是基于上一时刻控制量的增量
// 解释:当前时刻为 0,上一时刻为 -1,所以这个 u0 代表的是 -1 时刻的控制量大小
double u0 = 10.5916;
uMin << 9.6 - u0, 9.6 - u0, 9.6 - u0, 9.6 - u0;
uMax << 13 - u0, 13 - u0, 13 - u0, 13 - u0;
xMin << -M_PI / 6, -M_PI / 6, -OsqpEigen::INFTY, -OsqpEigen::INFTY, -OsqpEigen::INFTY, -1., -OsqpEigen::INFTY, -OsqpEigen::INFTY, -OsqpEigen::INFTY, -OsqpEigen::INFTY, -OsqpEigen::INFTY, -OsqpEigen::INFTY;
xMax << M_PI / 6, M_PI / 6, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY, OsqpEigen::INFTY;
}
// 函数作用:对矩阵 Q / R 赋值
// 注意:这个函数根据自己实际的需要进行赋值
void setWeightMatrices(Eigen::DiagonalMatrix<double, 12>& Q, Eigen::DiagonalMatrix<double, 4>& R) {
Q.diagonal() << 0, 0, 10., 10., 10., 10., 0, 0, 0, 5., 5., 5.;
R.diagonal() << 0.1, 0.1, 0.1, 0.1;
}
// 函数作用:对稀疏矩阵 P 赋值
void castMPCToQPHessian(const Eigen::DiagonalMatrix<double, 12>& Q,
const Eigen::DiagonalMatrix<double, 4>& R,
int mpcWindow,
Eigen::SparseMatrix<double>& hessianMatrix) {
hessianMatrix.resize(12 * (mpcWindow + 1) + 4 * mpcWindow, 12 * (mpcWindow + 1) + 4 * mpcWindow);
// 使用 Q / R 填充稀疏矩阵 P
for (int i = 0; i < 12 * (mpcWindow + 1) + 4 * mpcWindow; i++) {
if (i < 12 * (mpcWindow + 1)) {
int posQ = i % 12;
float value = Q.diagonal()[posQ];
if (value != 0) hessianMatrix.insert(i, i) = value;
}
else {
int posR = i % 4;
float value = R.diagonal()[posR];
if (value != 0) hessianMatrix.insert(i, i) = value;
}
}
}
// 函数作用:赋值向量 q
void castMPCToQPGradient(const Eigen::DiagonalMatrix<double, 12>& Q,
const Eigen::Matrix<double, 12, 1>& xRef,
int mpcWindow,
Eigen::VectorXd& gradient) {
Eigen::Matrix<double, 12, 1> Qx_ref;
Qx_ref = Q * (-xRef);
// 填充向量 q
gradient = Eigen::VectorXd::Zero(12 * (mpcWindow + 1) + 4 * mpcWindow, 1);
for (int i = 0; i < 12 * (mpcWindow + 1); i++) {
int posQ = i % 12;
float value = Qx_ref(posQ, 0);
gradient(i, 0) = value;
}
}
// 函数作用:赋值稀疏矩阵 A_c
void castMPCToQPConstraintMatrix(const Eigen::Matrix<double, 12, 12>& dynamicMatrix, // A
const Eigen::Matrix<double, 12, 4>& controlMatrix, // B
int mpcWindow,
Eigen::SparseMatrix<double>& constraintMatrix) {
constraintMatrix.resize(12 * (mpcWindow + 1) + 12 * (mpcWindow + 1) + 4 * mpcWindow, 12 * (mpcWindow + 1) + 4 * mpcWindow);
// 等式约束 -- 填充
for (int i = 0; i < 12 * (mpcWindow + 1); i++) {
constraintMatrix.insert(i, i) = -1;
}
// 填充 A_c 矩阵中的 A
for (int i = 0; i < mpcWindow; i++) {
for (int j = 0; j < 12; j++) {
for (int k = 0; k < 12; k++) {
float value = dynamicMatrix(j, k);
if (value != 0) constraintMatrix.insert(12 * (i + 1) + j, 12 * i + k) = value;
}
}
}
// 填充 A_c 矩阵中的 B
for (int i = 0; i < mpcWindow; i++) {
for (int j = 0; j < 12; j++) {
for (int k = 0; k < 4; k++) {
float value = controlMatrix(j, k);
if (value != 0) {
constraintMatrix.insert(12 * (i + 1) + j, 4 * i + k + 12 * (mpcWindow + 1)) = value;
}
}
}
}
// 不等式约束 -- 填充
for (int i = 0; i < 12 * (mpcWindow + 1) + 4 * mpcWindow; i++) {
constraintMatrix.insert(i + (mpcWindow + 1) * 12, i) = 1;
}
}
// 函数作用:赋值左右约束 l / u
void castMPCToQPConstraintVectors(const Eigen::Matrix<double, 12, 1>& xMax,
const Eigen::Matrix<double, 12, 1>& xMin,
const Eigen::Matrix<double, 4, 1>& uMax,
const Eigen::Matrix<double, 4, 1>& uMin,
const Eigen::Matrix<double, 12, 1>& x0,
int mpcWindow,
Eigen::VectorXd& lowerBound,
Eigen::VectorXd& upperBound) {
// 不等式约束的左右边界数组:[xmin , xmin , ... , xmin | umin , umin , ... umin ]
Eigen::VectorXd lowerInequality = Eigen::MatrixXd::Zero(12 * (mpcWindow + 1) + 4 * mpcWindow, 1);
Eigen::VectorXd upperInequality = Eigen::MatrixXd::Zero(12 * (mpcWindow + 1) + 4 * mpcWindow, 1);
for (int i = 0; i <= mpcWindow; i++) {
lowerInequality.block(12 * i, 0, 12, 1) = xMin;
upperInequality.block(12 * i, 0, 12, 1) = xMax;
}
for (int i = 0; i < mpcWindow; i++) {
lowerInequality.block(4 * i + 12 * (mpcWindow + 1), 0, 4, 1) = uMin;
upperInequality.block(4 * i + 12 * (mpcWindow + 1), 0, 4, 1) = uMax;
}
// 不全数组 l / u 的上半部分:[ -x0 , 0 , 0 , ... , 0 ]
Eigen::VectorXd lowerEquality = Eigen::MatrixXd::Zero(12 * (mpcWindow + 1), 1);
Eigen::VectorXd upperEquality;
lowerEquality.block(0, 0, 12, 1) = -x0;
upperEquality = lowerEquality;
lowerEquality = lowerEquality;
// 将数组融合,得到真正的上下边界数组 l / u
lowerBound = Eigen::MatrixXd::Zero(2 * 12 * (mpcWindow + 1) + 4 * mpcWindow, 1); // 分配内存空间
lowerBound << lowerEquality, lowerInequality;
upperBound = Eigen::MatrixXd::Zero(2 * 12 * (mpcWindow + 1) + 4 * mpcWindow, 1); // 分配内存空间
upperBound << upperEquality, upperInequality;
}
// 函数作用:更新约束边界 l 和 u
void updateConstraintVectors(const Eigen::Matrix<double, 12, 1>& x0,
Eigen::VectorXd& lowerBound,
Eigen::VectorXd& upperBound) {
lowerBound.block(0, 0, 12, 1) = -x0;
upperBound.block(0, 0, 12, 1) = -x0;
}
double getErrorNorm(const Eigen::Matrix<double, 12, 1>& x, const Eigen::Matrix<double, 12, 1>& xRef) {
Eigen::Matrix<double, 12, 1> error = x - xRef; // 计算误差(对比目标状态 xref 和当前状态 x0 之间的差距)
return error.norm(); // 返回误差的二范数
}
// 主函数:
int main() {
// 设定有限时域长度:
int mpcWindow = 20;
// 初始化原始问题涉及到的矩阵:
Eigen::DiagonalMatrix<double, 12> Q; // Q (对角阵)
Eigen::DiagonalMatrix<double, 4> R; // R (对角阵)
Eigen::Matrix<double, 12, 12> a; // A (状态量 x 的维数为 12)
Eigen::Matrix<double, 12, 4> b; // B (控制量 u 的维数为 4 )
Eigen::Matrix<double, 12, 1> xMax; // x_max
Eigen::Matrix<double, 12, 1> xMin; // x_min
Eigen::Matrix<double, 4, 1> uMax; // u_max
Eigen::Matrix<double, 4, 1> uMin; // u_min
Eigen::Matrix<double, 12, 1> x0; // x_0
Eigen::Matrix<double, 12, 1> xRef; // x_ref
// 指定初始值和参考值:
x0 << 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0;
xRef << 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0;
// 初始化 QP 问题涉及到的矩阵:
// 注意:这里只是初始化了名字,并未指定分配的内存空间的大小
Eigen::SparseMatrix<double> hessian; // P (稀疏矩阵)
Eigen::VectorXd gradient; // q
Eigen::SparseMatrix<double> linearMatrix; // A_c (稀疏矩阵)
Eigen::VectorXd lowerBound; // l
Eigen::VectorXd upperBound; // u
// 对原始问题中的矩阵进行赋值:
// 注意:这些函数根据自己实际的需要进行赋值,不同的系统这些矩阵的值肯定是不一样的
setWeightMatrices(Q, R); // 赋值矩阵 Q / R
setDynamicsMatrices(a, b); // 赋值矩阵 A / B
setInequalityConstraints(xMax, xMin, uMax, uMin); // 赋值约束条件
// 对 QP 问题中的矩阵进行赋值:
// 注意:这些函数不需要调整,固定的函数格式,因为都是通过上面原始问题的矩阵进行赋值的,只要传入的原始矩阵被修改了就行了
castMPCToQPHessian(Q, R, mpcWindow, hessian); // 赋值稀疏矩阵 P
castMPCToQPGradient(Q, xRef, mpcWindow, gradient); // 赋值向量 q
castMPCToQPConstraintMatrix(a, b, mpcWindow, linearMatrix); // 赋值稀疏矩阵 A_c
castMPCToQPConstraintVectors(xMax, xMin, uMax, uMin, x0, mpcWindow, lowerBound, upperBound); // 赋值左右约束 l / u
// 创建求解器:
// 注意:这句话只是实例化了一个求解器对象,但并未对其进行任何的配置
OsqpEigen::Solver solver;
// 配置求解器的设置:
solver.settings()->setVerbosity(true);
// 解释:这行代码会设置求解器的输出冗长程度,setVerbosity(false) 会关闭求解器的详细输出,使其在求解过程中不输出额外的信息,这在需要安静地运行求解器时非常有用;
solver.settings()->setWarmStart(true);
// 解释:启用 WarmStart 功能,加快求解速度(启用 WarmStart 意味着求解器在求解问题时,可以利用之前求解的结果作为初始猜测来加速收敛,这在处理连续求解类似问题时特别有用,可以显著减少计算时间);
// 配置求解器的数据:
// 包括:变量数目 + 约束数目 + 矩阵P + 梯度向量q + 线性约束矩阵A_c + 变量下界l + 上界u
// 解释:如果传入失败,各个函数返回值为 false
solver.data()->setNumberOfVariables(12 * (mpcWindow + 1) + 4 * mpcWindow); // 设置优化问题的变量数目( x_0 ~ x_N + u_0 ~ u_N-1 )
solver.data()->setNumberOfConstraints(2 * 12 * (mpcWindow + 1) + 4 * mpcWindow); // 设置优化问题的约束数目
if (!solver.data()->setHessianMatrix(hessian)) return 1; // 传入 P 矩阵
if (!solver.data()->setGradient(gradient)) return 1; // 传入 q 向量
if (!solver.data()->setLinearConstraintsMatrix(linearMatrix)) return 1; // 传入 A_c 矩阵
if (!solver.data()->setLowerBound(lowerBound)) return 1; // 传入 l
if (!solver.data()->setUpperBound(upperBound)) return 1; // 传入 u
// 初始化求解器:
// 解释:使用上面已经传入 settings() 和 data() 的配置参数,来初始化求解器
if (!solver.initSolver()) return 1;
// 定义矩阵存放:控制输入 / 求解器输出的解
Eigen::Vector4d ctr; // 存储 MPC 控制器输出的控制量
Eigen::VectorXd QPSolution; // 存储求解器的解
// 定义求解器最大迭代次数
int numberOfSteps = 50;
// 开始求解:
for (int i = 0; i < numberOfSteps; i++) {
// 使用求解器 solver 求解 QP 问题
if (solver.solveProblem() != OsqpEigen::ErrorExitFlag::NoError) return 1;
// 将 QP 问题的解存储在向量 QPSolution 中
QPSolution = solver.getSolution();
// 取解的第一个时间步的控制量 u0 放入向量 ctr 中
ctr = QPSolution.block(12 * (mpcWindow + 1), 0, 4, 1);
// 将当前时间步 0 处的状态 x0 的数据保存到 x0Data 中
auto x0Data = x0.data();
// 更新当前状态,时间步往前走一步
x0 = a * x0 + b * ctr;
// 根据更新后的 x0 值更新约束 l 和 u
// 解释:x0 的变化只会影响 l 和 u,而不会对矩阵 A_c / P / q 造成影响
updateConstraintVectors(x0, lowerBound, upperBound);
// 将更新后的约束边界应用于求解器
if (!solver.updateBounds(lowerBound, upperBound)) return 1;
}
return 0;
}








![[RL9] Rocky Linux 9.4 搭载 PG 16.1](https://img-blog.csdnimg.cn/img_convert/03db51c62e1123f472d7c581090ceed7.png)