写在前面
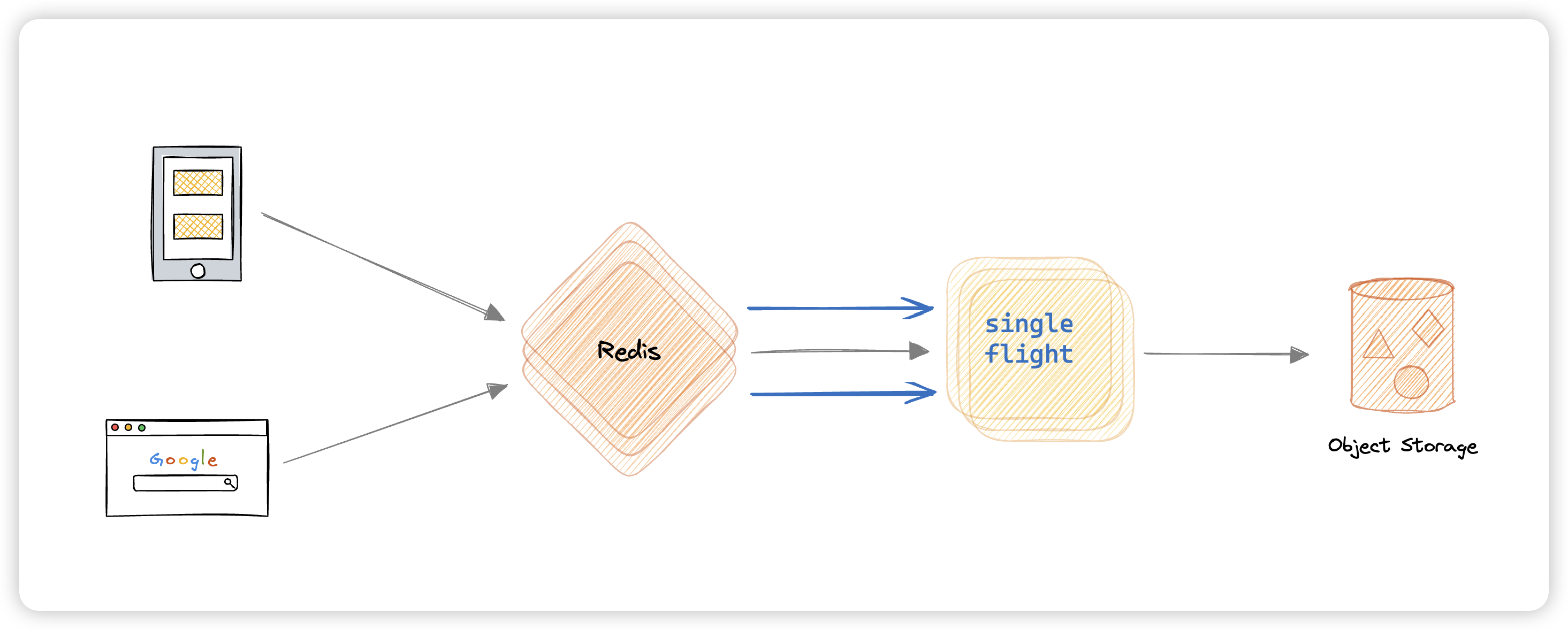
通俗的来说就是 singleflight 将相同的并发请求合并成一个请求,进而减少对下层服务的压力,通常用于解决缓存击穿的问题。
详解
基础结构
golang.org/x/sync/singleflight singleflight结构体:
type call struct {
wg sync.WaitGroup
// 这些字段在 WaitGroup 结束前写入一次
// 只有在 WaitGroup 结束后才会被读取。
val interface{}
err error
// 这些字段在 WaitGroup 结束前使用 singleflight 互斥锁进行读写
// 在 WaitGroup 结束后读取但不写入。
dups int
chans []chan<- Result
}
Group 代表分成多个工作组,形成一个命名空间,在这个命名空间中,各工作单元可以重复执行。
type Group struct {
mu sync.Mutex // 互斥锁
m map[string]*call // 懒加载
}
Result 保存 Do 方法的结果,以便在通道上传递。做异步处理。
type Result struct {
Val interface{}
Err error
Shared bool
}
简单demo
func TestSingleFightExample(t *testing.T) {
var group singleflight.Group
// 模拟一个并发请求
for i := 0; i < 5; i++ {
go func(i int) {
key := "example"
tmp := i // 将tmp放进去
val, err, _ := group.Do(key, func() (interface{}, error) {
// 模拟一次耗时操作
time.Sleep(time.Second)
return fmt.Sprintf("result_%d", tmp), nil
})
if err != nil {
fmt.Println("Error:", err)
}
fmt.Println("Value:", val)
}(i)
}
// 等待所有请求完成
time.Sleep(3 * time.Second)
}
结果:这是一个很随机的过程,0~4都有可能,主要看哪个协程最先进来。
Value: result_2
Value: result_2
Value: result_2
Value: result_2
Value: result_2
Do 执行函数:对同一个 key 多次调用的时候,在第一次调用没有执行完的时候, 只会执行一次 fn,其他的调用会阻塞住等待这次调用返回, shared 表示fn的结果是否被共享
func (g *Group) Do(key string, fn func() (interface{}, error)) (v interface{}, err error, shared bool)
DoChan 和 Do 类似,只是 DoChan 返回一个 channel,也就是同步与异步的区别
func (g *Group) DoChan(key string, fn func() (interface{}, error)) <-chan Result
Forget:用于通知 Group 删除某个 key 这样后面继续这个 key 的调用的时候就不会在阻塞等待了
func (g *Group) Forget(key string){
g.mu.Lock()
if c, ok := g.m[key]; ok {
c.forgotten = true
}
delete(g.m, key)
g.mu.Unlock()
}
singleflight的本质是对某次函数调用的复用,只执行1次,并将执行期间相同的函数返回相同的结果。由此产生一个问题,如果实际执行的函数出了问题,比如超时,则在此期间的所有调用都会超时,由此需要一些额外的方法来控制。
在一些对可用性要求极高的场景下,往往需要一定的请求饱和度来保证业务的最终成功率。一次请求还是多次请求,对于下游服务而言并没有太大区别,此时使用 singleflight 只是为了降低请求的数量级,那么使用 Forget() 提高下游请求的并发。
常见面试题
singleflight 是什么?什么时候用的?
缓存失效,合并请求的时候用的,这样我们就可以减少对DB的请求压力。
如果这个goruntine超时怎么办?
singleflight 内部使用 waitGroup 来让同一个 key 的除了第一个请求的后续所有请求都阻塞。直到第一个请求执行 func 返回后,其他请求才会返回。
这意味着,如果 func 执行需要很长时间,那么后面的所有请求都会被一直阻塞。
这时候我们可以使用 DoChan 结合ctx + select做超时控制
func TestSingleFightTimeout(t *testing.T) {
ctx, cancel := context.WithTimeout(context.Background(), 3*time.Second)
go doFly(ctx)
time.Sleep(2 * time.Second)
cancel() // 2秒后超时
}
func doFly(ctx context.Context) {
var g singleflight.Group
key := "example"
// 使用 DoChan 结合 select 做超时控制
result := g.DoChan(key, func() (interface{}, error) {
time.Sleep(5 * time.Second) // 模拟超时
return "result", nil
})
select {
case r := <-result:
fmt.Println("r", r.Val)
case <-ctx.Done():
fmt.Println("done")
return
}
}
结果输出:
done
上述代码中,我们将主进程先sleep 2秒,然后再进行cancel,那么此时我们将会让DoChan这个方法 time.Sleep 5秒模拟超时。那么我们会发现函数过了2秒之后就会输出done。
doChan方法具体是怎么实现的?
在DoChan方法中,有一个 go g.doCall(c, key, fn) 的操作,当一个 goroutine 来执行,并通过channel 来返回数据,这样外部可以自定义超时逻辑,防止因为 fn 的阻塞,导致大量请求都被阻塞。
func (g *Group) DoChan(key string, fn func() (interface{}, error)) <-chan Result {
ch := make(chan Result, 1)
g.mu.Lock()
if g.m == nil {
g.m = make(map[string]*call)
}
if c, ok := g.m[key]; ok { // 如果没有这个key
c.dups++
c.chans = append(c.chans, ch)
g.mu.Unlock()
return ch
}
c := &call{chans: []chan<- Result{ch}} // 构造异步返回结构体,可以接参数进行超时
c.wg.Add(1)
g.m[key] = c
g.mu.Unlock()
go g.doCall(c, key, fn) // 异步执行
return ch
}
如果请求失败了怎么办?
如果第一个请求失败了,那么后续所有等待的请求都会返回同一个 error。但实际上可以根据下游能支撑的 rps 定时 forget 这个 key,让更多的请求能有机会走到后续逻辑。
go func() {
time.Sleep(100 * time.Millisecond)
g.Forget(key)
}()
比如1秒内有100个请求过来,正常是第一个请求能执行queryDB,后续99个都会阻塞。增加这个 Forget 之后,每 100ms 就能有一个请求执行 queryDB,相当于是多了几次尝试的机会,相对的也给DB造成了更大的压力,需要根据具体场景进去取舍。 因为有可能前几次是因为DB的抖动导致的查询失败,重试之后就能实现了。
参考链接
[1] https://pkg.go.dev/golang.org/x/sync/singleflight
[2] https://www.lixueduan.com/posts/go/singleflight
[3] https://juejin.cn/post/7093859835694809125












![[chisel]马上要火的硬件语言,快来了解一下优缺点](https://img-blog.csdnimg.cn/img_convert/f9a9c642e73791d405078c6422c17704.webp?x-oss-process=image/format,png)