本篇讲全面的讲解 AVL 树的插入,旋转以及验证 AVL 树的性能(本篇未实现删除代码)。至于为什么会有 AVL 树,这是因为简单的二叉搜索树并不能直接的保证搜索的效率,因为当我们在二叉搜索树中插入一段有序的序列的时候,二叉搜索树就会退化为单枝树,这个时候进行搜索的时候,时间复杂度就变为了 O(n^2),如下:
但是通过 AVL 树的旋转就可以很好的解决这个问题,使树近似等于完全二叉树或者满二叉树。

AVL 树代码
先给出代码,接着在下文中给出解释:
#pragma once #include <iostream> #include <assert.h> using namespace std; template <class K, class V> struct AVLTreeNode { AVLTreeNode<K, V>* _left; AVLTreeNode<K, V>* _right; AVLTreeNode<K, V>* _parent; pair<K, V> _kv; int _balanceFactor; AVLTreeNode(const pair<K, V>& kv) : _left(nullptr) , _right(nullptr) , _parent(nullptr) , _kv(kv) , _balanceFactor(0) {} }; template <class K, class V> class AVLTree { public: typedef AVLTreeNode<K, V> Node; Node* find(const K& key) { Node* cur = _root; while (cur) { if (cur->_kv.first < key) cur = cur->_right; else if (cur->_kv.first > key) cur = cur->_left; else return cur; } return nullptr; } // 插入删除查找遍历 bool insert(const pair<K, V>& kv) { if (_root == nullptr) { _root = new Node(kv); return true; } // 开始查找 Node* parent = nullptr; Node* cur = _root; while (cur) { if (cur->_kv.first < kv.first) parent = cur, cur = cur->_right; else if (cur->_kv.first > kv.first) parent = cur, cur = cur->_left; else return false; } // cur == nullptr cur = new Node(kv); //if (parent->_left == cur) // parent->_left = cur; //else // parent->_right = cur; if (parent->_kv.first > kv.first) parent->_left = cur; else parent->_right = cur; cur->_parent = parent; // 需要更新平衡因子 // 如果是在父亲的左边,父亲的平衡因子减一、右边加一 if (parent->_left == cur) parent->_balanceFactor--; else parent->_balanceFactor++; // 查看爷爷结点是否需要更新 while (parent) { if (parent->_balanceFactor == 0) { break; } else if (parent->_balanceFactor == 1 || parent->_balanceFactor == -1) { if (parent == _root) break; // 现在的parent就不可能等于null parent = parent->_parent; cur = cur->_parent; if (parent->_left == cur) parent->_balanceFactor--; else parent->_balanceFactor++; } else if(parent->_balanceFactor == 2 || parent->_balanceFactor == -2) { if (parent->_balanceFactor == 2 && cur->_balanceFactor == 1) RotateLeft(parent); else if (parent->_balanceFactor == -2 && cur->_balanceFactor == -1) RotateRight(parent); else if (parent->_balanceFactor == -2 && cur->_balanceFactor == 1) RotateLeftRight(parent); else if (parent->_balanceFactor == 2 && cur->_balanceFactor == -1) RotateRightLeft(parent); else assert(false); break; } else { assert(false); } } return true; } void RotateRight(Node* parent) { Node* subL = parent->_left; Node* subLR = subL->_right; // 将左孩子的右节点链接到原父亲结点 if (subLR) subLR->_parent = parent; parent->_left = subLR; Node* ppNode = parent->_parent; // 将左孩子变为原父亲结点的父亲 subL->_right = parent; parent->_parent = subL; // 将爷爷结点重新链接 if (ppNode == nullptr) { _root = subL; _root->_parent = nullptr; } else { if (ppNode->_left == parent) ppNode->_left = subL; else ppNode->_right = subL; subL->_parent = ppNode; } subL->_balanceFactor = parent->_balanceFactor = 0; } void RotateLeft(Node* parent) { Node* subR = parent->_right; Node* subRL = subR->_left; Node* ppNode = parent->_parent; parent->_right = subRL; if (subRL) subRL->_parent = parent; subR->_left = parent; parent->_parent = subR; if (ppNode == nullptr) { _root = subR; _root->_parent = nullptr; } else { if (ppNode->_left == parent) ppNode->_left = subR; else ppNode->_right = subR; subR->_parent = ppNode; } subR->_balanceFactor = parent->_balanceFactor = 0; } void RotateRightLeft(Node* parent) { Node* subR = parent->_right; Node* subRL = subR->_left; int balanceFactor = subRL->_balanceFactor; RotateRight(subR); RotateLeft(parent); // 更新平衡因子 subRL->_balanceFactor = 0; if (balanceFactor == -1) { parent->_balanceFactor = 0; subR->_balanceFactor = 1; } else if (balanceFactor == 1) { parent->_balanceFactor = -1; subR->_balanceFactor = 0; } else if (balanceFactor == 0) { parent->_balanceFactor = 0; subR->_balanceFactor = 0; } else { assert(false); } } void RotateLeftRight(Node* parent) { Node* subL = parent->_left; Node* subLR = subL->_right; int balanceFactor = subLR->_balanceFactor; // 先左旋后右旋 RotateLeft(subL); RotateRight(parent); subLR->_balanceFactor = 0; if (balanceFactor == -1) { subL->_balanceFactor = 0; parent->_balanceFactor = 1; } else if (balanceFactor == 1) { parent->_balanceFactor = 0; subL->_balanceFactor = -1; } else if (balanceFactor == 0) { parent->_balanceFactor = 0; subL->_balanceFactor = 0; } else { assert(false); } } void InOrder() { _InOrder(_root); cout << endl; } int height() { int h = _height(_root); return h; } int size() { int s = _size(_root); return s; } bool IsBalance() { return _IsBalance(_root); } private: bool _IsBalance(Node* root) { if (root == nullptr) return true; int leftHeight = _height(root->_left); int rightHeight = _height(root->_right); if (abs(leftHeight - rightHeight) >= 2) return false; if (abs(root->_balanceFactor) >= 2) return false; return _IsBalance(root->_left) && _IsBalance(root->_right); } int _height(Node* root) { if (root == nullptr) return 0; int left = _height(root->_left); int right = _height(root->_right); int height = max(left, right); return height + 1; } int _size(Node* root) { if (root == nullptr) return 0; return _size(root->_left) + _size(root->_right) + 1; } void _InOrder(Node* root) { if (root == nullptr) return; _InOrder(root->_left); cout << root->_kv.first << " " << root->_kv.second << endl; _InOrder(root->_right); } private: Node* _root = nullptr; };
AVL 树的概念于抽象数据结构
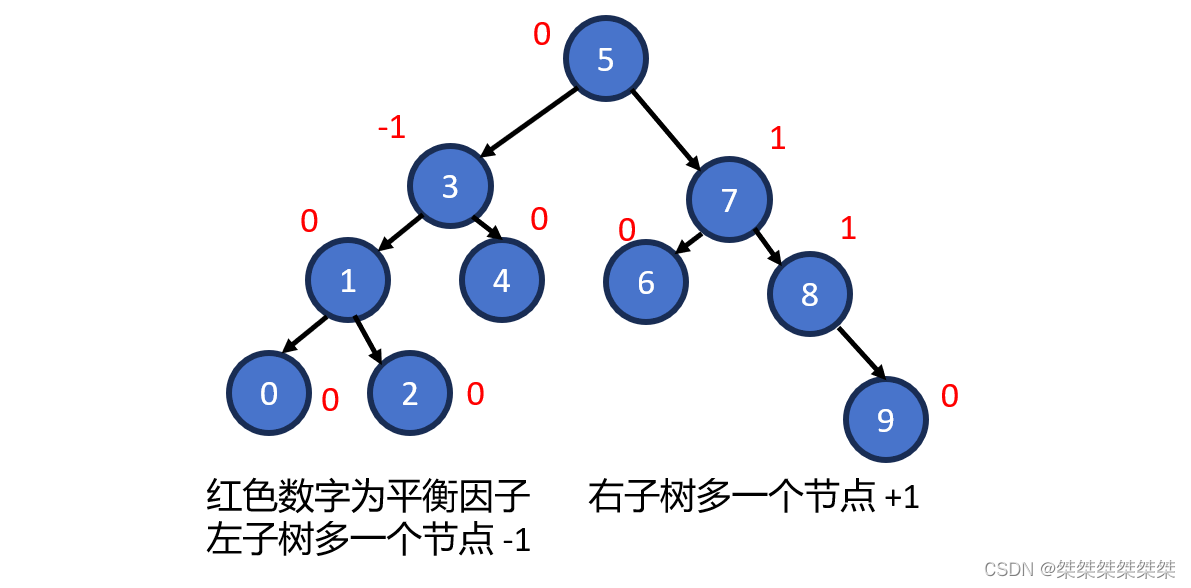
一颗 AVL 树是空树或者是具有以下性质的二叉搜索树:
1. 它的左右子树都是 AVL 树
2. 左右子树的高度之差(平衡因子)的绝对值不超过 1
左右子树的高度差不超过 1,可以降低树的高度,减少平均搜索长度。如下:
关于 AVL 树的抽象数据结构,我们首先需要抽象出 AVL 树节点的数据结构,在 AVL 树中,我们存储的关键数据为键值对 pair,AVL 树节点中的平衡因子。然后需要一个指向左子树的指针,指向右子树的指针同时还需要一个指向父节点的指针,可以让我们便于更新每个节点的平衡因子。如下:
template <class K, class V> struct AVLTreeNode { AVLTreeNode<K, V>* _left; AVLTreeNode<K, V>* _right; AVLTreeNode<K, V>* _parent; pair<K, V> _kv; int _balanceFactor; AVLTreeNode(const pair<K, V>& kv) :_left(nullptr) , _right(nullptr) , _parent(nullptr) , _kv(kv) , _balanceFactor(0) {} };
AVL 树的插入
关于 AVL 树而言,只是在二叉搜索树的基础上引入了平衡因子,所以 AVL 树也可以看出二叉搜索树(左右高度差不大于1的二叉搜索树),所以对于 AVL 树的插入,可以分为以下两步:
1. 按照二叉搜索树的方式插入新节点。
2. 调整节点的平衡因子。
所以我们插入节点,只需要找到应该插入的位置,然后插入即可,寻找插入位置按照:键值小于当前节点,向左子树搜索,键值大于当前节点,向右子树搜索的原则,直到找到空节点为止,就是应该插入的位置。寻找的时候,还需要记录下每一次搜索的父节点,便于链接指针,如下:
bool insert(const pair<K, V>& kv) { if (_root == nullptr) { _root = new Node(kv); return true; } // 开始查找 Node* parent = nullptr; Node* cur = _root; while (cur) { if (cur->_kv.first < kv.first) parent = cur, cur = cur->_right; else if (cur->_kv.first > kv.first) parent = cur, cur = cur->_left; else return false; } // cur == nullptr cur = new Node(kv); // 链接孩子节点和父节点 if (parent->_kv.first > kv.first) parent->_left = cur; else parent->_right = cur; cur->_parent = parent; // 需要更新平衡因子... return true; }插入成功,则返回 true,插入失败(树中已经存在键值)则返回 false。
以上只是完成了插入,插入元素之后,我们还需要更新节点的平衡因子,更新平衡因子按照以下原则进行更新:
1. 插入元素位置位于父节点的右边,父节点的平衡因子 +1;
2. 插入元素位置位于父节点的左边,父节点的平衡因子 -1。
3. 更新完父节点的平衡因子之后,父节点的平衡因子的取值可能为 0、正负1、正负2。
5. 父节点的平衡因子更新完之后为0,不会影响父节点的父节点的平衡,所以不用在往上更新。
6. 父节点的平衡因子跟新完之后为正负1,说明原来父节点的平衡因子为0,这时还会影响父节点的父节点的平衡因子,所以需要继续向上更新。当某个节点的平衡原则为正负二的时候,我们就需要通过选择使树平衡。
如下:
// 需要更新平衡因子 // 如果是在父亲的左边,父亲的平衡因子减一、右边加一 if (parent->_left == cur) parent->_balanceFactor--; else parent->_balanceFactor++; // 查看爷爷结点是否需要更新 while (parent) { if (parent->_balanceFactor == 0) { break; } else if (parent->_balanceFactor == 1 || parent->_balanceFactor == -1) { if (parent == _root) break; // 现在的parent就不可能等于null parent = parent->_parent; cur = cur->_parent; if (parent->_left == cur) parent->_balanceFactor--; else parent->_balanceFactor++; } else if(parent->_balanceFactor == 2 || parent->_balanceFactor == -2) { if (parent->_balanceFactor == 2 && cur->_balanceFactor == 1) RotateLeft(parent); else if (parent->_balanceFactor == -2 && cur->_balanceFactor == -1) RotateRight(parent); else if (parent->_balanceFactor == -2 && cur->_balanceFactor == 1) RotateLeftRight(parent); else if (parent->_balanceFactor == 2 && cur->_balanceFactor == -1) RotateRightLeft(parent); else assert(false); break; } else { assert(false); } }对于如上的代码中,其中最难的一步就是旋转,关于旋转一共会出现四种情况:左单旋、右单旋、左右双旋、右左双旋。
AVL 树的旋转
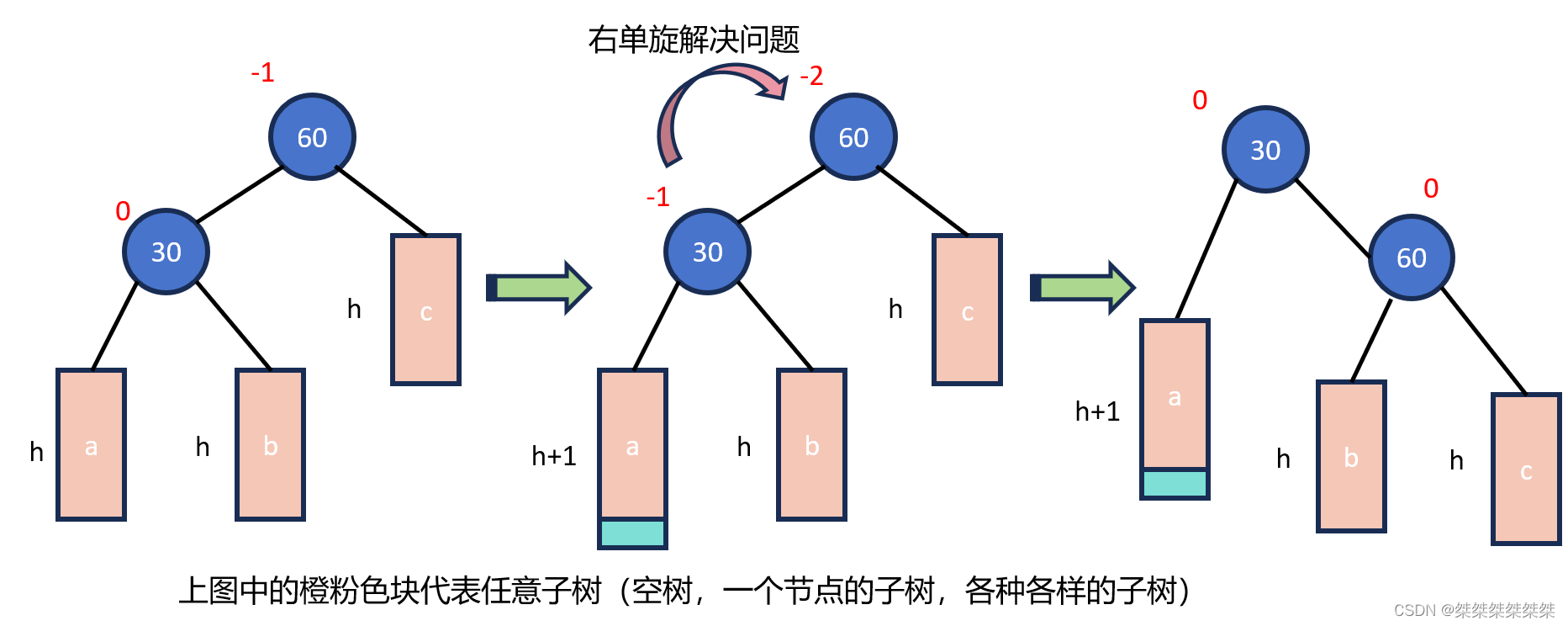
我们首先介绍右单旋,当新节点插入导较高左子树的左侧就会出现右单旋,关于右单旋出现的情况如下:
当出现如上所示的情况时(父亲节点的平衡因子等于-2,左孩子节点的平衡因子为-1时),我们就需要进行右旋,也就是将左孩子作为父节点,父节点作为右孩子,在将左孩子的右节点链接到原父节点上。其中还有需要注意的点:右旋时的父节点不一定是根节点,所以我们在旋转的时候,还需要记录下父节点的父节点,最后将其链接到一起。
void RotateRight(Node* parent) { Node* subL = parent->_left; Node* subLR = subL->_right; // 将左孩子的右节点链接到原父亲结点 if (subLR) subLR->_parent = parent; parent->_left = subLR; Node* ppNode = parent->_parent; // 将左孩子变为原父亲结点的父亲 subL->_right = parent; parent->_parent = subL; // 将爷爷结点重新链接 if (ppNode == nullptr) { _root = subL; _root->_parent = nullptr; } else { if (ppNode->_left == parent) ppNode->_left = subL; else ppNode->_right = subL; subL->_parent = ppNode; } subL->_balanceFactor = parent->_balanceFactor = 0; }记得最后将节点的平衡因子设置为0。
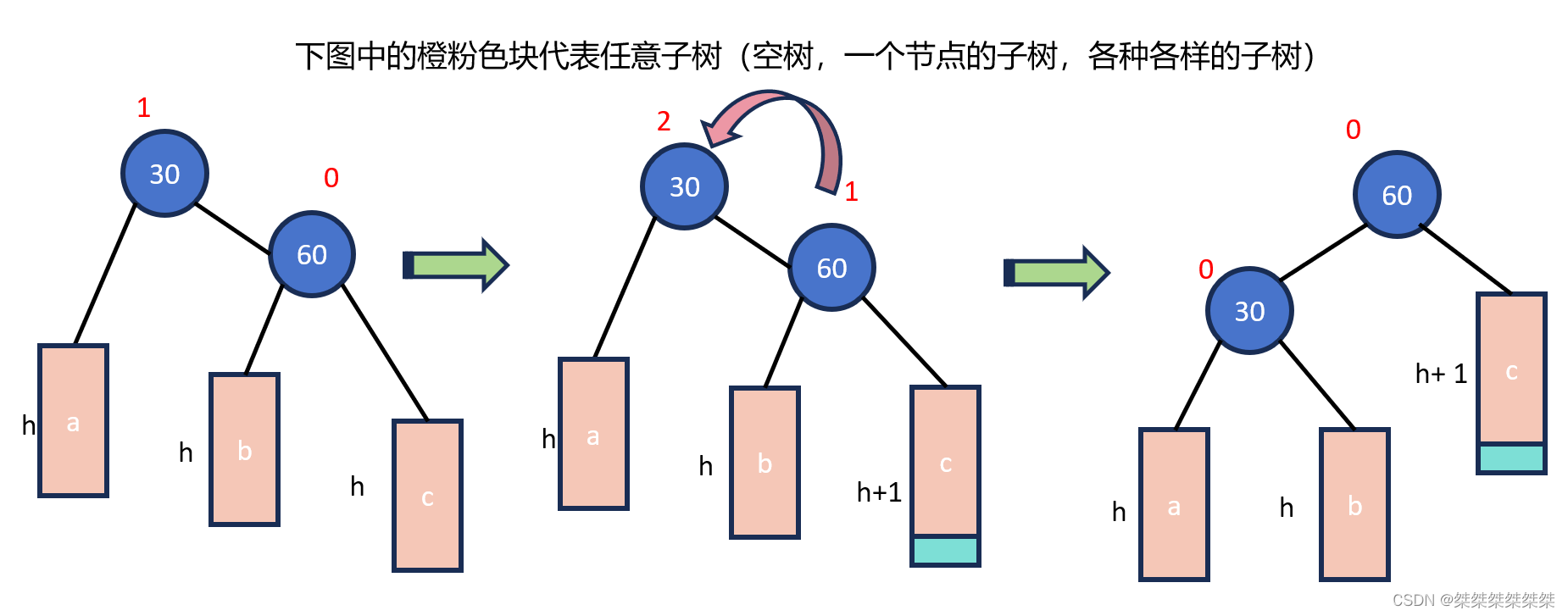
接着我们介绍左单旋:当新节点插入到较高右子树的右侧,关于这种情况如下:
关于左单旋,其思想和右单旋基本一致,不过是将右单旋的给镜像了过来。所以当父节点的平衡因子为2,右节点的平衡因子为1的时候,我们就需要对树进行左单旋。也就是让右孩子的左节点作为父节点的右孩子,左节点作为父节点,原父节点作为左孩子的左节点。注意原父节点的父节点是否为 nullptr,最后需要更新节点的平衡因子。如下:
void RotateLeft(Node* parent) { Node* subR = parent->_right; Node* subRL = subR->_left; Node* ppNode = parent->_parent; parent->_right = subRL; if (subRL) subRL->_parent = parent; subR->_left = parent; parent->_parent = subR; if (ppNode == nullptr) { _root = subR; _root->_parent = nullptr; } else { if (ppNode->_left == parent) ppNode->_left = subR; else ppNode->_right = subR; subR->_parent = ppNode; } subR->_balanceFactor = parent->_balanceFactor = 0; }第三种情况,左右双旋。左右双旋就是分别需要左旋一次,然后右旋一次,接着更新我们的平衡因子,如下:
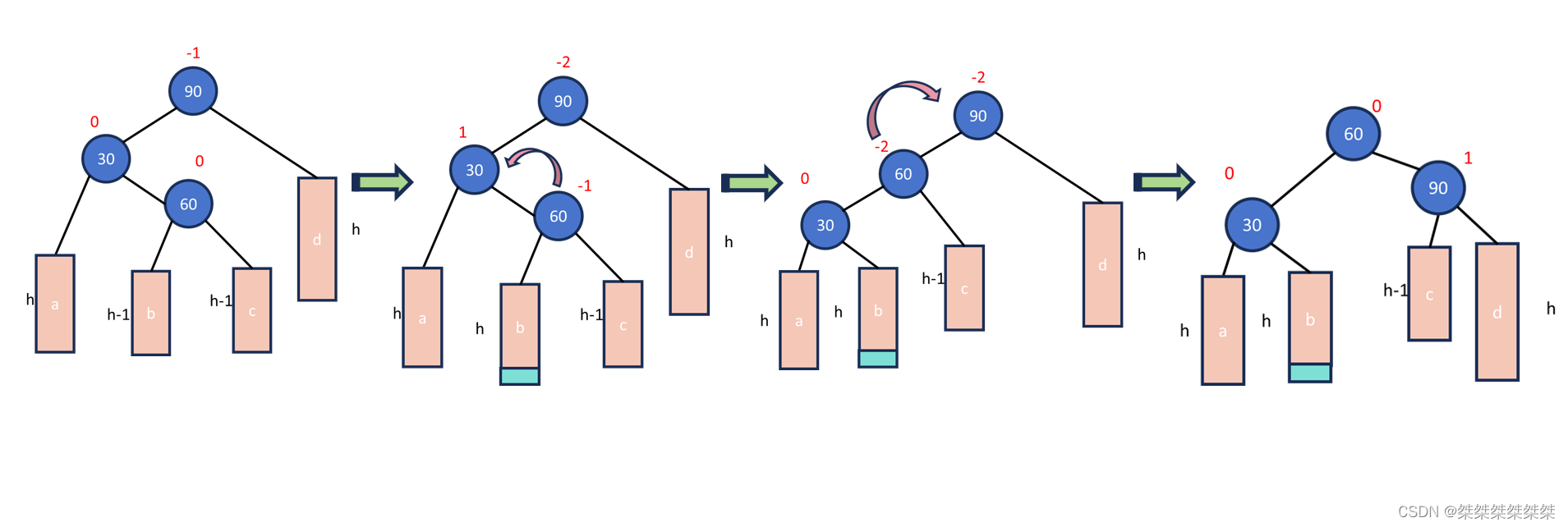
如上图所示,当左孩子节点的平衡因子为1,父节点的平衡因子为-2的时候,我们就需要进行左右双旋,当我们旋转之后,当前父节点的平衡因子一定为0,但原父节点和左孩子节点的平衡因子一共有三种情况,分别是0 0,1 0,0 -1。当 h = 0 的时候,插入的节点就是以上的60节点,旋转之后所有节点(一共就3个节点)都是为0,当节点插入到60的左边,那么30的平衡因子为0(如图),当节点插入到60的右边,90的平衡因子则为0。
因为在单独调用左单选,右单旋之后,会将所有节点的平衡因子都置为0,所以我们需要进行特殊处理。如下:
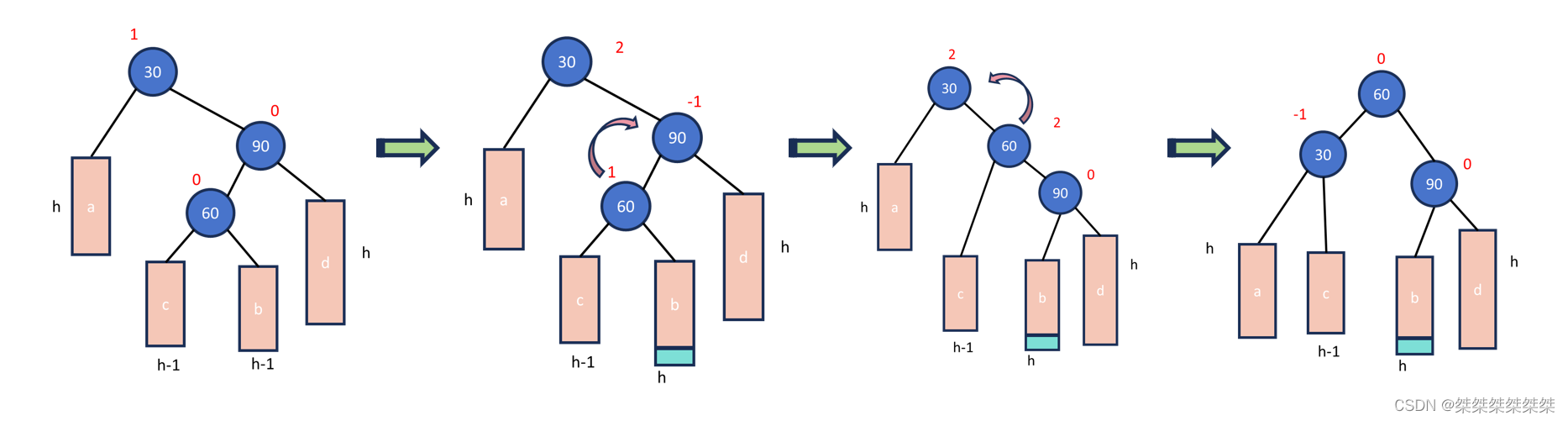
void RotateLeftRight(Node* parent) { Node* subL = parent->_left; Node* subLR = subL->_right; int balanceFactor = subLR->_balanceFactor; // 先左旋后右旋 RotateLeft(subL); RotateRight(parent); subLR->_balanceFactor = 0; if (balanceFactor == -1) { subL->_balanceFactor = 0; parent->_balanceFactor = 1; } else if (balanceFactor == 1) { parent->_balanceFactor = 0; subL->_balanceFactor = -1; } else if (balanceFactor == 0) { parent->_balanceFactor = 0; subL->_balanceFactor = 0; } else { assert(false); } }最后一种情况:右左双旋。也就是先右旋然后在左旋,也就是和以上的情况是堆成的情况,如下:
对于需要右左旋转的情况为父节点为2,右孩子为1.关于转换的细节和以上的左右双旋的情况向对称,在这就不细讲了,代码如下:
void RotateRightLeft(Node* parent) { Node* subR = parent->_right; Node* subRL = subR->_left; int balanceFactor = subRL->_balanceFactor; RotateRight(subR); RotateLeft(parent); // 更新平衡因子 subRL->_balanceFactor = 0; if (balanceFactor == -1) { parent->_balanceFactor = 0; subR->_balanceFactor = 1; } else if (balanceFactor == 1) { parent->_balanceFactor = -1; subR->_balanceFactor = 0; } else if (balanceFactor == 0) { parent->_balanceFactor = 0; subR->_balanceFactor = 0; } else { assert(false); } }
AVL 树的验证 + 测试
接下来我们将对我们是新的 AVL 树进行验证,也就是看我们写出的代码是否符合 AVL 树的特性,其中主要包括特性测试和压力测试。在进行测试之前,我们需要先写出一些辅助函数,如下:
template <class K, class V> class AVLTree { public: typedef AVLTreeNode<K, V> Node; void InOrder() { _InOrder(_root); cout << endl; } int height() { int h = _height(_root); return h; } int size() { int s = _size(_root); return s; } bool IsBalance() { return _IsBalance(_root); } private: bool _IsBalance(Node* root) { if (root == nullptr) return true; int leftHeight = _height(root->_left); int rightHeight = _height(root->_right); if (abs(leftHeight - rightHeight) >= 2) return false; if (abs(root->_balanceFactor) >= 2) return false; return _IsBalance(root->_left) && _IsBalance(root->_right); } int _height(Node* root) { if (root == nullptr) return 0; int left = _height(root->_left); int right = _height(root->_right); int height = max(left, right); return height + 1; } int _size(Node* root) { if (root == nullptr) return 0; return _size(root->_left) + _size(root->_right) + 1; } void _InOrder(Node* root) { if (root == nullptr) return; _InOrder(root->_left); cout << root->_kv.first << " " << root->_kv.second << endl; _InOrder(root->_right); } private: Node* _root = nullptr; };我们先进行特性测试,如下:
如上所示,我们一共验证了两组数据,其中包含了左旋、右旋、左右双旋、右左双旋四种情况。
接着进行暴力测试,生成一百万个数据,主要测试性能和插入是否成功:
如上所示,插入一百万个数据也可以生成平衡树。
测试源码如下:
void TestAVL01() { int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 }; // {16, 3, 7, 11, 9, 26, 18, 14, 15} AVLTree<int, int> avtree; for (auto e : a) { if (e == 4) { int i = 0; } avtree.insert(make_pair(e, e)); } avtree.InOrder(); cout << avtree.height() << endl; cout << avtree.size() << endl; cout << avtree.IsBalance() << endl; } void TestAVL02() { const int N = 1000000; vector<int> v; v.reserve(N); srand(time(0)); for (int i = 0; i < N; i++) { v.push_back(rand() + 1); } size_t begin1 = clock(); AVLTree<int,int> tree; for (auto e : v) tree.insert({e, e}); size_t end1 = clock(); cout << "insert" << end1 - begin1 << endl; cout << "Height:" << tree.height() << endl; cout << "Size:" << tree.size() << endl; size_t begin2 = clock(); for (auto e : v) tree.find(e); size_t end2 = clock(); cout << "find:" << end2 - begin2 << endl; cout << tree.IsBalance() << endl; }




![[AI Google] 使用 Gemini 取得更多成就:试用 1.5 Pro 和更多智能功能](https://img-blog.csdnimg.cn/img_convert/0cf0182552ad70efe617676344c72211.png)