%升力体:通用航空运载器CAV-H
%读取数据1 升力系数
alpha = [10 15 20]; Ma = [3.5 5 8 10 15 20 23];
alpha1 = 10:0.1:20; Ma1 = 3.5:0.1:23;
[Ma1, alpha1] = meshgrid(Ma1, alpha1);
CL = readmatrix('simulation.xlsx', 'Sheet', 'Sheet1', 'Range', 'B2:H4');
CL1 = interp2(Ma, alpha, CL, Ma1, alpha1, 'spline');
CD = readmatrix('simulation.xlsx', 'Sheet', 'Sheet1', 'Range', 'B7:H9');
CD1 = interp2(Ma, alpha, CD, Ma1, alpha1, 'spline');
% 常量
Sm = 0.484; % 参考面积750in²
m = 907.18; % 质量
g = 9.80665; % 重力加速度
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 求解区 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 初始滑翔段
% 初始值:[Vx, Vy, Vz, x, y, z]
% 初始滑翔段初始值(列向量)
y0_1 = [6500; 0; 0; 0; 0; 80000]; % 修改为6x1列向量 % Vx=6500m/s,初始高度80km
tspan1 = 0:0.02:300;
options = odeset('Events', @odeEventFun);
[t1, y1] = ode45(@(t,y) Fun1(t, y, m, Sm, CL1, CD1, g), tspan1, y0_1, options);
% 滑翔段
y0_2 = y1(end, :); % 继承初始段终态
tspan2 = t1(end):0.02:2000;
[t2, y2] = ode45(@(t,y) Fun2(t, y, m, Sm, CL1, CD1, g), tspan2, y0_2);
% 下压段
y0_3 = y2(end, :); % 继承滑翔段终态
tspan3 = 2000:0.02:2300;
options1 = odeset('Events', @odeEventFun1);
[t3, y3] = ode45(@(t,y) Fun3(t, y, m, Sm, CL1, CD1, g), tspan3, y0_3, options1);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 结果可视化 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 合并轨迹数据
t = [t1; t2; t3];
y = [y1; y2; y3];
Vx = y(:,1); Vy = y(:,2); Vz = y(:,3);
x = y(:,4); y_pos = y(:,5); z = y(:,6);
V = sqrt(Vx.^2 + Vy.^2 + Vz.^2);
% 绘制高度-时间曲线
figure(1)
plot(t, zMATLAB脚本实现了一个三自由度的通用航空运载器(CAV-H)的轨迹仿真,主要用于模拟升力体在不同飞行阶段(初始滑翔段、滑翔段、下压段)的运动轨迹
news2026/2/17 12:12:52
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2336510.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

Linux——消息队列
目录 一、消息队列的定义
二、相关函数
2.1 msgget 函数
2.2 msgsnd 函数
2.3 msgrcv 函数
2.4 msgctl 函数
三、消息队列的操作 3.1 创建消息队列
3.2 获取消息队列并发送消息
3.3 从消息队列接收消息recv
四、 删除消息队列
4.1 ipcrm
4.2 msgctl函数 一、消息…
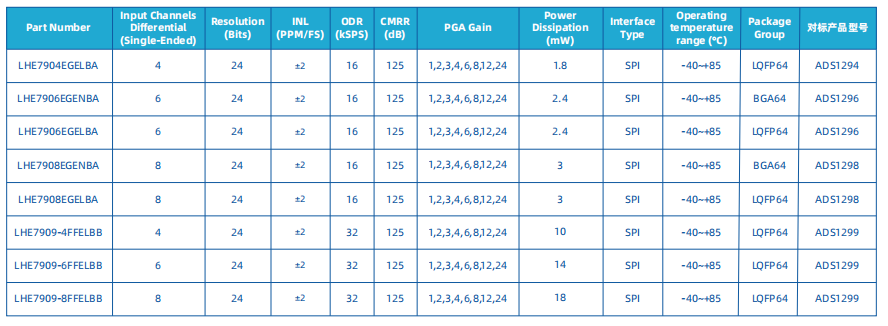
领慧立芯LHE7909可兼容替代TI的ADS1299
LHE7909是一款由领慧立芯(Legendsemi)推出的24位高精度Δ-Σ模数转换器(ADC),主要面向医疗电子和生物电势测量应用,如脑电图(EEG)、心电图(ECG)等设备。以下是…
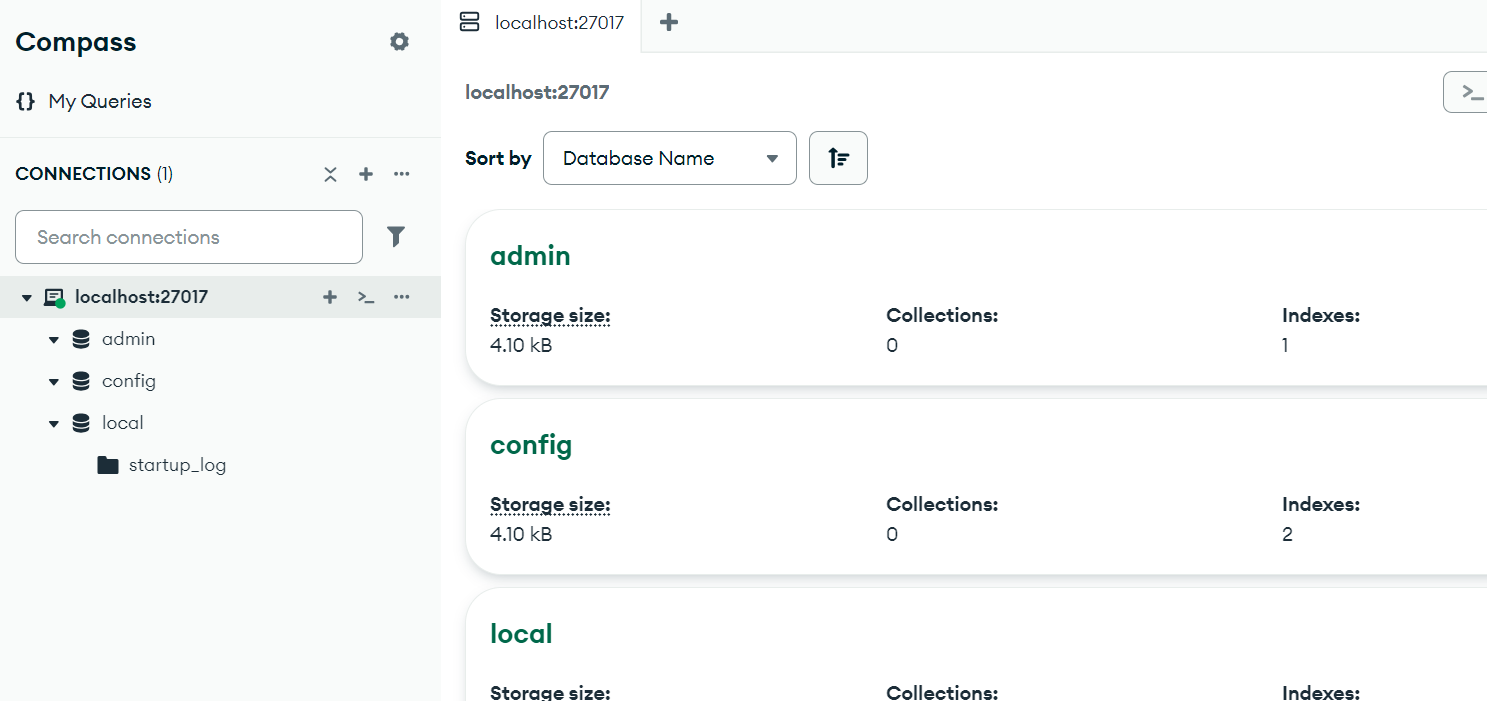
MongoDB简单用法
图片中 MongoDB Compass 中显示了默认的三个数据库:
adminconfiglocal
如果在 .env 文件中配置的是:
MONGODB_URImongodb://admin:passwordlocalhost:27017/
MONGODB_NAMERAGSAAS💡 一、为什么 Compass 里没有 RAGSAAS 数据库?…
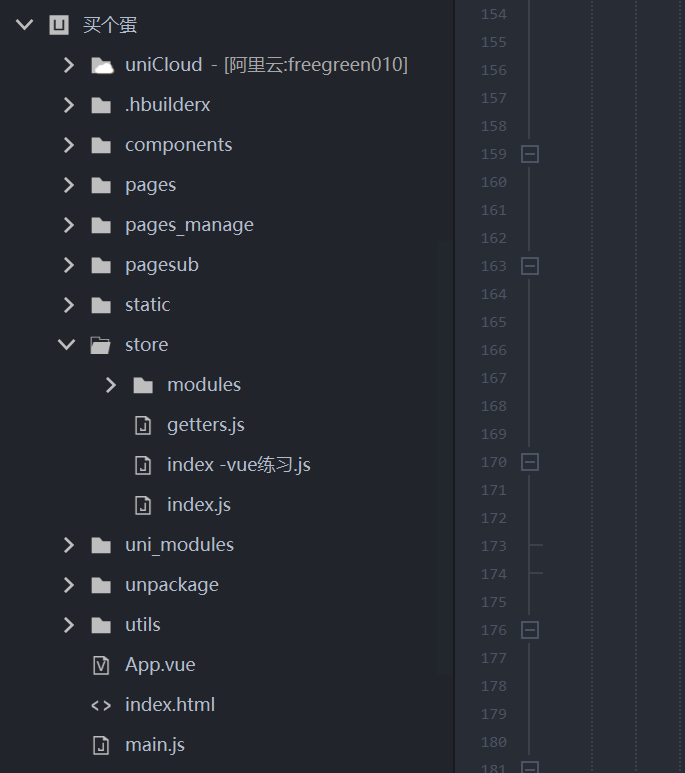
uniapp-商城-26-vuex 使用流程
为了能在所有的页面都实现状态管理,我们按照前面讲的页面进行状态获取,然后再进行页面设置和布局,那就是重复工作,vuex 就会解决这样的问题,如同类、高度提炼的接口来帮助我们实现这些重复工作的管理。避免一直在造一样的轮子。
https://vuex.vuejs.org/zh/#%E4%BB%80%E4…
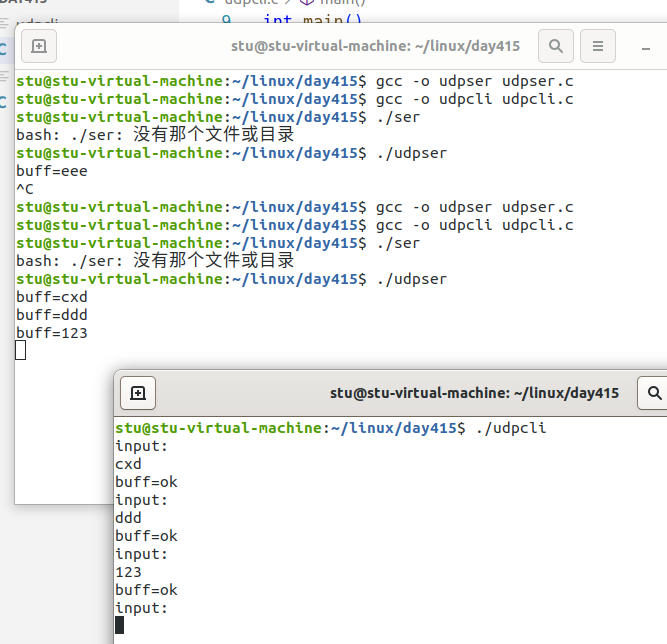
UDP概念特点+编程流程
UDP概念编程流程 目录
一、UDP基本概念
1.1 概念
1.2 特点
1.2.1 无连接性:
1.2.2 不可靠性
1.2.3 面向报文
二、UDP编程流程
2.1 客户端 cli.c
2.2 服务端ser.c 一、UDP基本概念
1.1 概念
UDP 即用户数据报协议(User Datagram Protocol &…
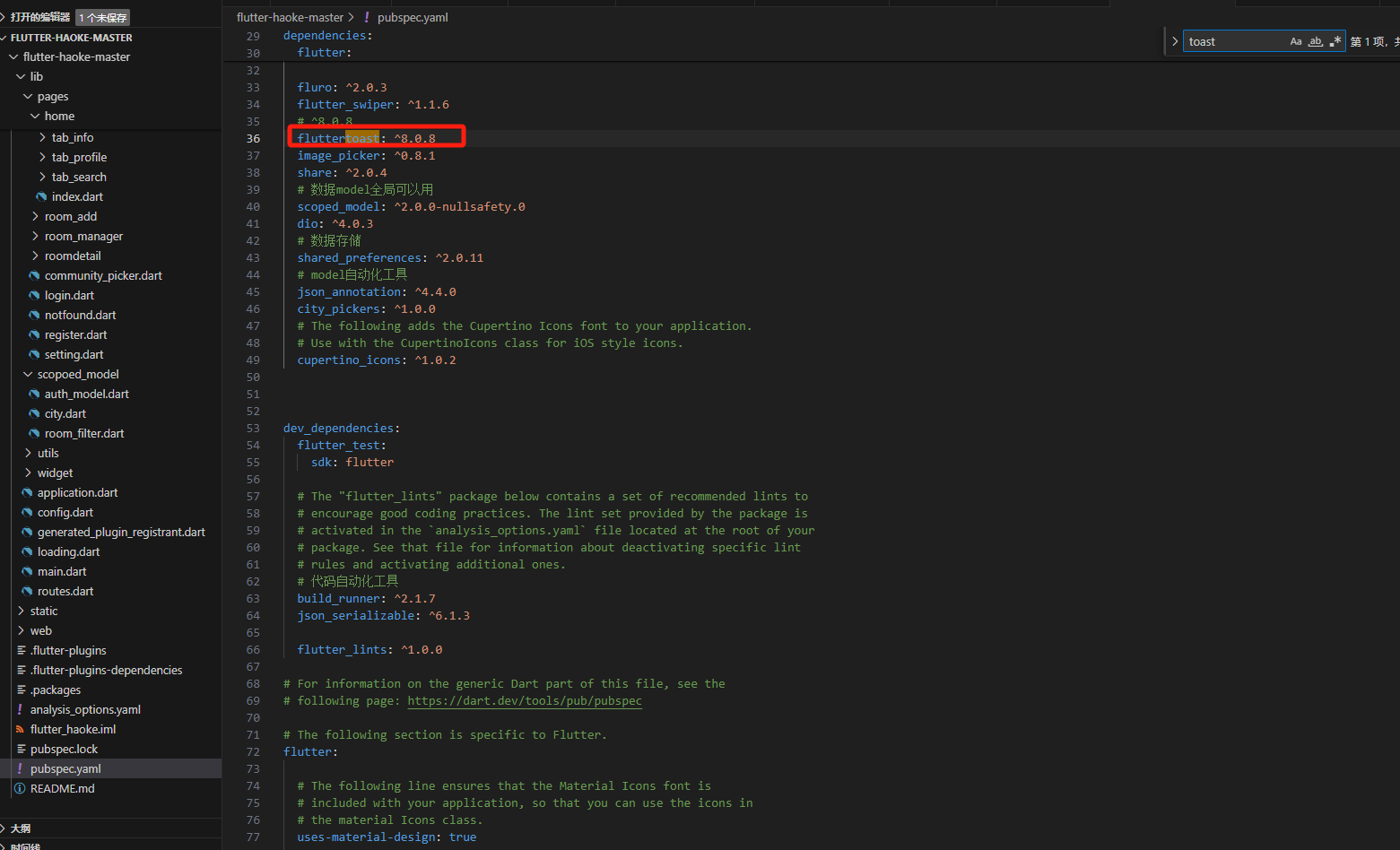
Flutter项目之设置页
目录: 1、实现效果图2、实现流程2.1、引入依赖2.2、封装弹窗工具类2.3、设置页2.4、路由中注册设置页面 1、实现效果图 2、实现流程
2.1、引入依赖 2.2、封装弹窗工具类
import package:fluttertoast/fluttertoast.dart;class CommontToast {static showToast(Str…
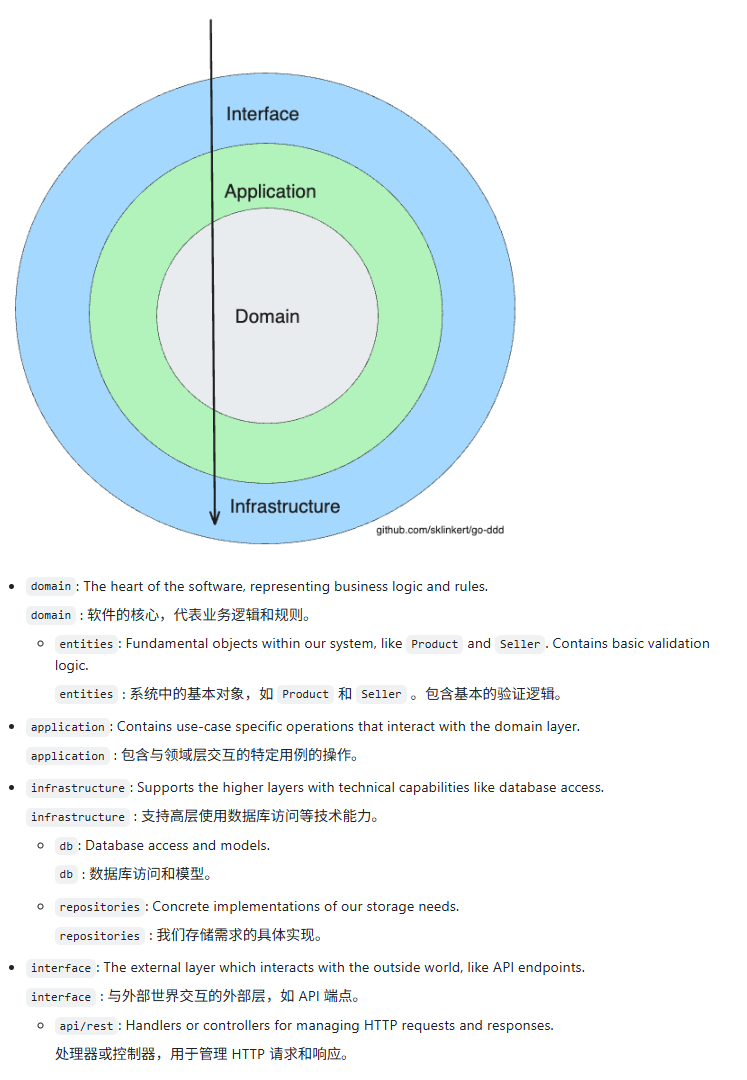
通过GO后端项目实践理解DDD架构
最近在工作过程中重构的项目要求使用DDD架构,在网上查询资料发现教程五花八门,并且大部分内容都是长篇的概念讲解,晦涩难懂,笔者看了一些github上入门的使用DDD的GO项目,并结合自己开发中的经验,谈谈自己对…
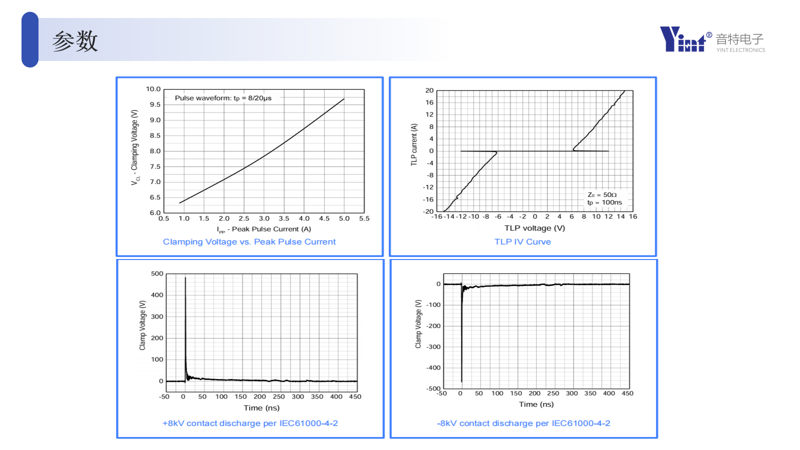
天线静电防护:NRESDTLC5V0D8B
一. 物联网天线的使用环境
1.1 联网天线广泛应用于智能家居领域,比如智能门锁、智能摄像头等设备中,通过天线实现设备与家庭网络的连接,用户可以远程控制和监控家居设备。以智能摄像头为例,它通过天线将拍摄的画面实时传输到用户…
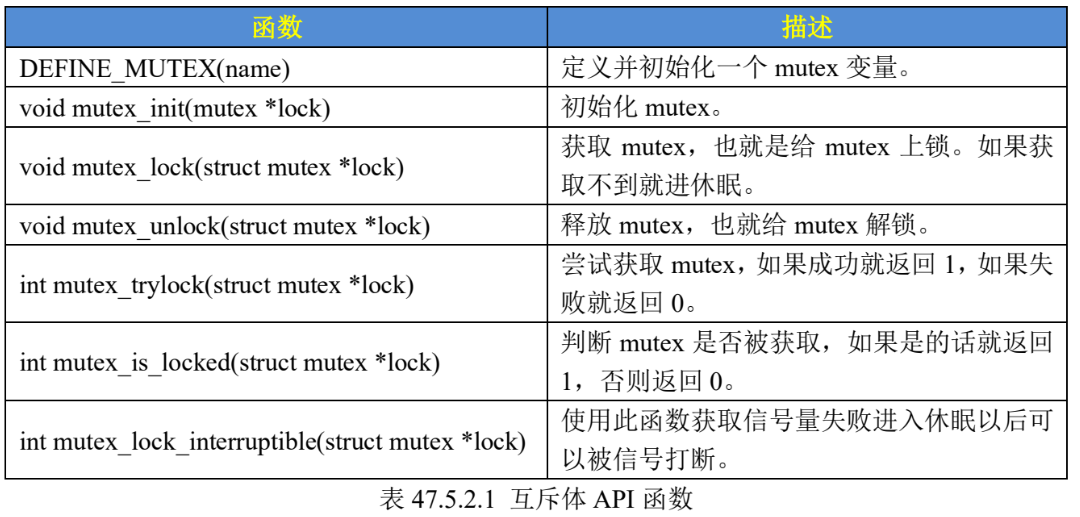
【Linux 并发与竞争】
【Linux 并发与竞争】 Linux是一个多任务操作系统,肯定会存在多个任务共同操作同一段内存或者设备的情况,多个任务甚至中断都能访问的资源叫做共享资源,就和共享单车一样。在驱动开发中要注意对共享资源的保护,也就是要处理对共享…

STM32F103C8T6-基于FreeRTOS系统实现步进电机控制
引言 上一篇文章讲述了如何使用蓝牙连接stm32进行数据收发控制步进电机,这篇在之前的基础上通过移植操作系统(FreeRTOS或者其他的也可以,原理操作都类似)实现步进电机控制。
上篇博客指路:STM32蓝牙连接Android实现云…
macOS安装java
一、下载
官网Java Downloads | Oracle
安装载java8,下载对应的JDK
Java Downloads | Oracle 二、双击安装 安装 完成 三、查看安装位置 打开终端窗口,执行命令:
/usr/libexec/java_home -V /Library/Java/JavaVirtualMachines/jdk-1.8.jdk/Content…

zkmall模块商城:B2C 场景下 Vue3 前端性能优化的广度探索与实践
ZKmall作为面向B2C场景的模块化电商平台,其前端性能优化在Vue3框架下的实践融合了架构设计、渲染机制与业务特性,形成了一套多维度的优化体系。以下从技术实现与业务适配两个维度展开分析: 一、Vue3响应式系统深度适配 Proxy驱动的精准更新…
【Netty篇】Future Promise 详解
目录 一、 Netty Future 与 Promise —— 异步世界的“信使”与“传话筒”🚀1、 理解 Netty Future2、 理解 Netty Promise 二、 代码案例解读💻例1:同步处理任务成功👍例2:异步处理任务成功📲例3ÿ…
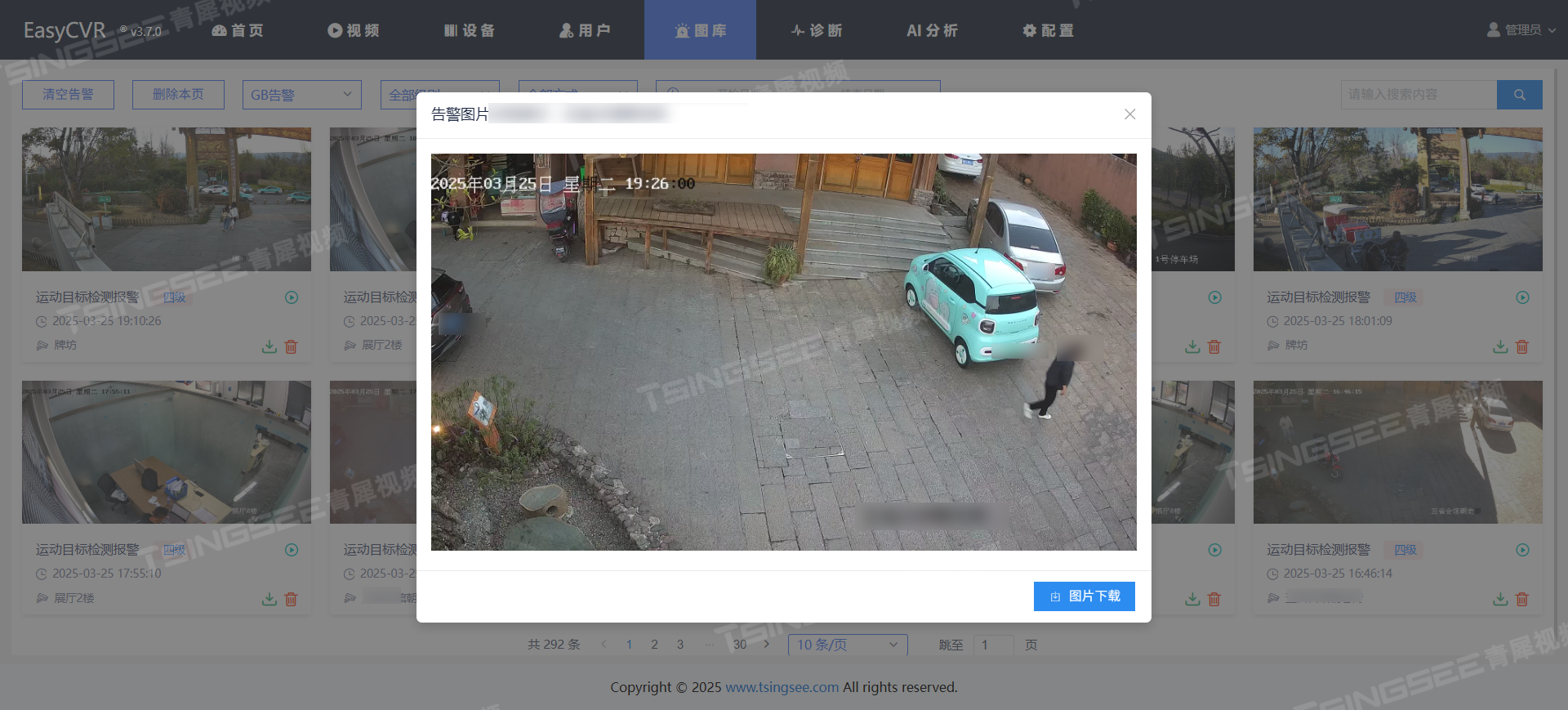
视频分析设备平台EasyCVR安防视频管理系统,打造电石生产智能视频监控新体系
一、背景介绍
电石生产中的出炉工序是整个生产流程中最为繁重且危险的环节。在开堵炉眼的过程中,电石极易发生飞溅现象,尤其在进行吹氧操作时,人员灼伤的风险极高。鉴于此,该工序正逐步由传统的人工操作模式向智能化方向转变。然…
从 PyTorch 到 ONNX:深度学习模型导出全解析
在模型训练完毕后,我们通常希望将其部署到推理平台中,比如 TensorRT、ONNX Runtime 或移动端框架。而 ONNX(Open Neural Network Exchange)正是 PyTorch 与这些平台之间的桥梁。
本文将以一个图像去噪模型 SimpleDenoiser 为例&a…

Android 应用添加Tile到SystemUI QuickSettings
安卓源码里有谷歌给的关于 Tile 的说明。 frameworks/base/packages/SystemUI/docs/qs-tiles.md
SystemUI QuickSettings 简称QS,指的是 下拉菜单里的区域。区域里的一个选项就是一个 Tile 。
下图是 frameworks/base/packages/SystemUI/docs/ 里的附图示例&#…

【MySQL】前缀索引、索引下推、访问方法,自适应哈希索引
最左前缀原则
对于INDEX(name, age)来说最左前缀可以是联合索引的最左N个字段, 也可以是字符串索引的最左M个字符。 SELECT * FROM t WHERE name LIKE 张%其效果和单独创建一个INDEX(name)的效果是一样的若通过调整索引字段的顺序, 可以少维护一个索引树, 那么这个顺序就是需要…

Android Studio开发知识:从基础到进阶
引言 Android开发作为移动应用开发的主流方向之一,曾吸引了无数开发者投身其中。然而,随着市场饱和和技术迭代,当前的Android开发就业形势并不乐观,竞争日益激烈。尽管如此,掌握扎实的开发技能仍然是脱颖而出的关键。本…
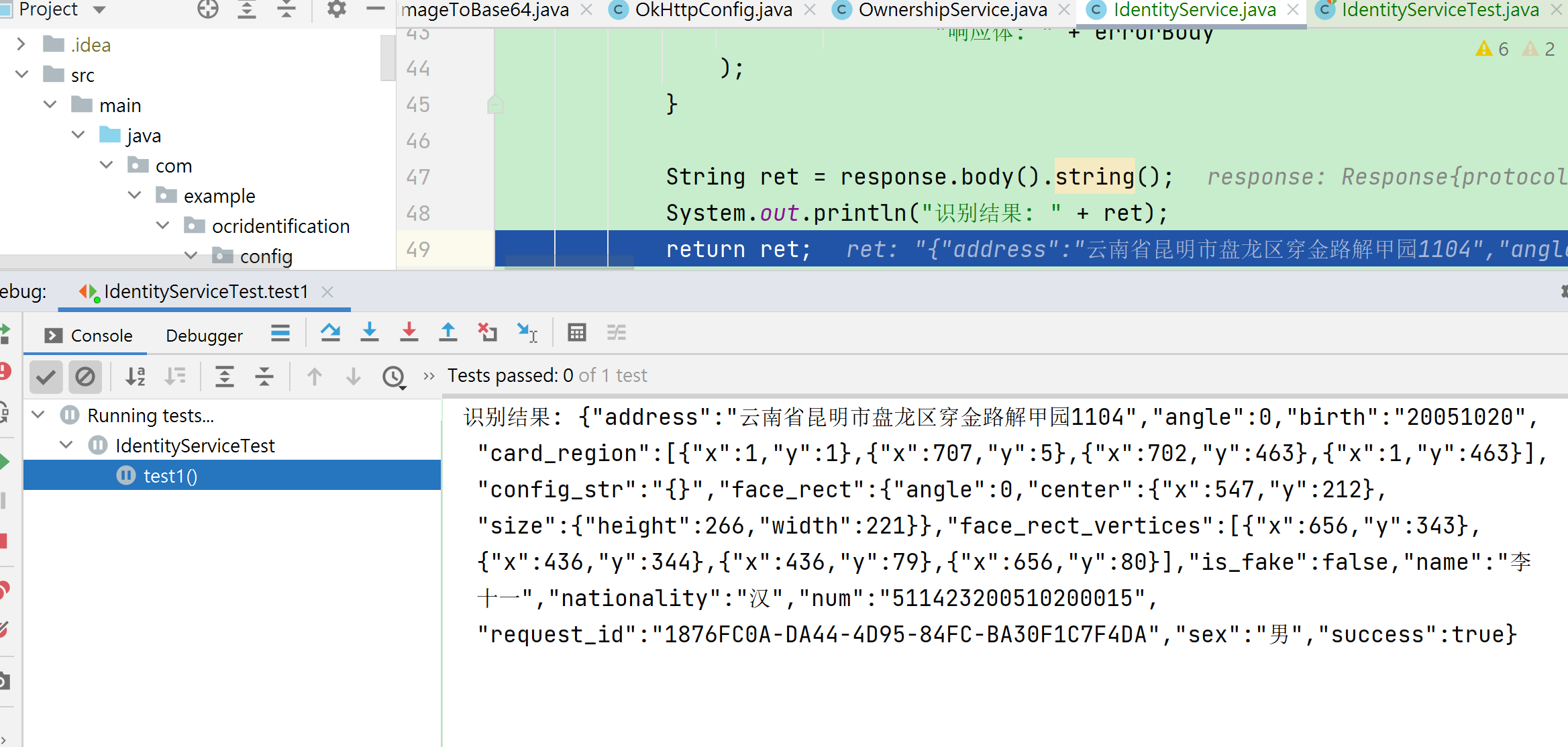
ocr-身份证正反面识别
在阿里云官网,申请一个token
[阿里官方]身份证OCR文字识别_API专区_云市场-阿里云 (aliyun.com)
观察一下post请求body部分json字符串,我们根据这个创建一个java对象 先默认是人像面
public class IdentityBody {public String image;class configure…