GB/T 43947-2024 低速线控底盘通用技术要求
线控协议
转向
| 功能 | 子功能 | 信号 | 描述 | 性能要求 | 分辨率 |
|---|---|---|---|---|---|
| 线控转向功能 | 转向控制 | 使能 | 人工切自驾标志位 | 上升沿0-1,有效 | - |
| 线控转向功能 | 转向控制 | 电机输出转向轴的转角。目标方向盘转角 | 范围(deg) -500~500,右负,左正 | 响应延迟: ΔT1<200ms; 最大转动角度设置范围θMAX:视车而定 最大超调角Δθ1: [0,6]:0.6 (6, 66]: min[2, θtarget×10%]; (66, θMAX]:min[3,θtarget×3%]; 最大角度误差Δθ2: 0.6 deg 转动执行时间ΔT2: Max(200,1.25*θtarget/θ’target)ms 超调时间ΔT3:<200 ms | ≤1deg |
| / | 转向控制 | 目标方向盘转速(可选) | 总线控制转向系统的目标转动速度(deg/s) | 转动速率设置范围θ target:0~500deg/s如果没有该接口,建议方向盘以最大速度执行 | ≤1deg/s |
| / | 转向反馈 | 方向盘转角 | 方向盘的目标角度 | 方向盘转角传感器是车辆重要的传感器,底盘VCU对方向盘转角采样周期不可超过20ms;所采集的方向盘转角连续,无锯齿,无突变 | 1deg |
| / | 转向反馈 | 方向盘转速(可选) | 方向盘转动速度 | / | 1deg/s |
| / | 转向反馈 | 转向驾驶模式 | 转向系统的驾驶模式信息。建议至少提供两种模式:自动驾驶,手动驾驶。 | 与使能信号对应:使能–>转向自动驾驶;非使能–>转向非自动驾驶 | - |
| 转向反馈 | 转向系统的故障信息 | 转向系统的通信超时(可选)转向系统的故障信息(必需) | 底盘故障提供bool值,可按需确定是否需要提供error_code | - | |
| 人工接管 | - | 自动驾驶开关关闭或遥控器接管 | 与转向驾驶模式对应:接管:转向自动驾驶——>非自动,人工模式(被接管) | - | |
| 越界处理 | - | 越界限值要大于方向盘最大转角范围,认为越界. | 越界做保护,保持最大值 | - |
驱动
| 功能 | 子功能 | 信号 | 描述 | 性能要求 | 分辨率 |
|---|---|---|---|---|---|
| 线控驱动功能 | 控制 | 使能 | 控制驱动系统从人工驾驶状态切换到自动驾驶状态的标志位 | 上升沿信号使能 | - |
| 线控驱动功能 | 控制 | 目标油门踏板位置 | 目标油(电)门踏板的位置(%),范围0-100% | 响应延迟不超过500ms,执行超调不超过2% | ≤1% |
| 线控驱动功能 | 控制 | 目标驱动扭矩 | 目标驱动扭矩 | 响应延迟不超过500ms,执行超调不超过2% | ≤0.1N·m |
| 线控驱动功能 | 控制 | 目标纵向加速度 | 0~3m/s2 | 响应延迟不超过500ms,执行超调不超过2% | ≤0.1m/s2 |
| 线控驱动功能 | 控制 | 目标纵车速 | 目标车辆速度 | 具备车速阶跃变化,需要满足较大减速度输出,刹车距离小的性能响应延迟不超过500ms执行超调不超过2% | 0.01m/s或1km/h |
| 线控驱动功能 | 反馈 | 目标加速踏板位置 | 实际加速踏板的位置(%),范围0-100% | 反馈车辆驱动踏板百分比或驱动电机电流百分比 | ≤1% |
| 线控驱动功能 | 反馈 | 目标驱动扭矩 | 实际驱动扭矩 | 按需,理论上可转化为百分比 | ≤0.1N·m |
| 线控驱动功能 | 反馈 | 目标纵向加速度 | 实际车辆加速度 | 范围0~3m/s2 | ≤0.1m/s2 |
| 线控驱动功能 | 反馈 | 车速 | 车辆实际速度 | 车速传感器是底盘重要传感器,底盘控制器对车速的获取采样周期不可超过20ms;车速值连续变化,无锯齿,无突变 | 0.01m/s或1km/h |
| 线控驱动功能 | 反馈 | 轮速(可选) | 车辆实际4个车轮轮速 | 车速传感器是底盘重要传感器,底盘控制器对车速的获取采样周期不可超过20ms;车速值连续变化,无锯齿,无突变 | 0.01m/s或1km/h |
| 线控驱动功能 | 反馈 | 驱动驾驶模式 | 驱动系统的驾驶模式信息。建议至少提供两种模式:自动驾驶,手动驾驶。 | 与使能信号对应:使能——>转向自动驾驶;非使能——>转向非自动驾驶 | - |
| 线控驱动功能 | 反馈 | 驱动系统的故障信息 | 驱动系统的通信超时(可选)驱动系统的故障信息(必需) | 底盘故障提供bool值,可按需确定是否需要提供error_code | - |
驱动:驱动控制接口,一般推荐油门踏板接口,控制精度1%以内;驱动反馈接口,踏板反馈精度与控制精度对齐,1%以内;踏板控制超调建议不超过目标踏板控制量的1%。
制动
| 功能 | 子功能 | 信号 | 描述 | 性能要求 | 分辨率 |
|---|---|---|---|---|---|
| 线控制动功能 | 控制 | 使能 | |||
| 线控制动功能 | 控制 | 目标制动踏板位置 | 目标加速踏板的位置(%),范围0-100% | 底盘液压制动,液压缸压力闭环响应延迟不超过300ms,执行超调不超过2% | ≤1% |
| 线控制动功能 | 控制 | 目标制动减速度 | 目标车辆减速度 | 范围0~ -5 m/s2 | ≤0.1m/s2 |
| 线控制动功能 | 反馈 | 目标制动踏板位置 | 实际制动踏板的位置(%) | 反馈车辆实际液压压力百分比或实际制动踏板百分比 | ≤1% |
| 线控制动功能 | 反馈 | 目标制动加速度 | 实际车辆减速度 | ≤0.1m/s2 | |
| 线控制动功能 | 反馈 | 制动驾驶模式 | 制动系统的驾驶模式信息。建议至少提供两种模式:自动驾驶,手动驾驶。 | 与使能信号对应:使能——>转向自动驾驶;非使能——>转向非自动驾驶 | - |
| 线控制动功能 | 反馈 | 制动系统的故障信息 | 制动系统的通信超时(可选)制动系统的故障信息(必需) | 底盘故障提供bool值,可按需确定是否需要提供error_code |
制动:制动控制接口,一般推荐刹车踏板接口;制动反馈接口,踏板反馈精度1%以内;踏板控制超调建议不超过目标踏板控制量的1%
底盘能力测试
| 类别 | 描述 |
|---|---|
| 直线行驶性能 | 100m侧向跑偏距离小于2m。 |
| 制动性能 | 5km/h 制动距离 应该为0.65m, s <= 0.1V0 + 0.006V0*V0 S:制动距离m V0 制动初始速度,km/h |
| 制动响应 | 低速线控底盘制动响应能力应满足以下要求: a)当使用制动压力控制方式时,制动阶跃响应时间不大于200ms,超调量不大于±0.3MPa或士10%;b)当使用减速度控制方式时,减速度控制阶跃响应时间不大于250ms,超调量不大于±0.5m/s或士10%。 |
| 线控转向总体要求 | a)支持转角闭环或位置闭环控制功能; b)在平坦、干燥和清洁的道路上正常行驶,如没有转向指令时转向系统不发生轻飘、摆振、抖动及跑偏现象; c)左转车轮最大转角与右转车轮最大转角的对称性大于95%; d)提供转向机构转角信号或位置信号、转向电机转速信号; e)具备转向系统异常检测机制,在检测到转向系统故障时在100ms内执行安全措施,并能够上报对应的故障码; f)设计时使低速线控底盘自身具有一些弱的不足转向性,以提高行驶安全性。 |
| 线控转向响应能力 | 低速线控底盘线控转向系统响应能力应满足以下要求: a)轮端角度响应分辨率不大于0.3°; b)转向系统响应时间不大于200ms; c)整车空载静止状态下,当轮端目标角度从0°转向到士25°时,在目标转角20%~80%区域内转向角速度不低于15(°)/s,最大超调量不大于1°,稳态误差不大于0.6°。 |
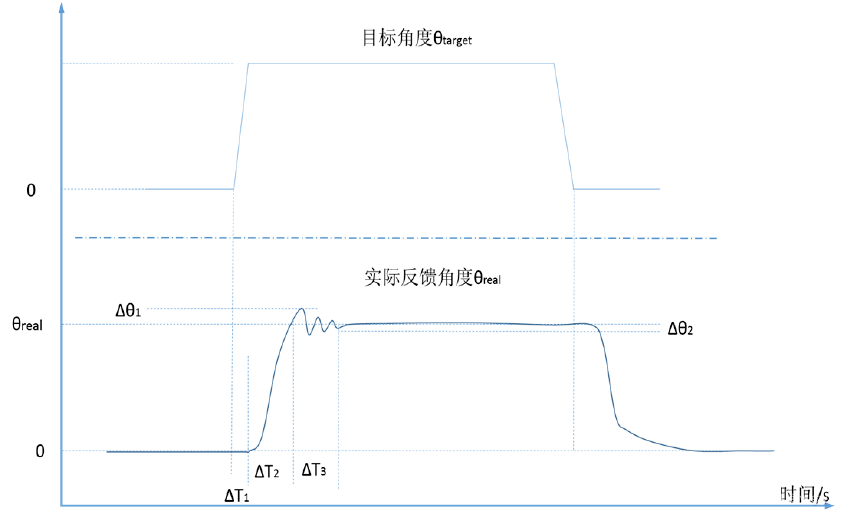
线控转向性
- 目标角度 θ \theta θ 通过CAN总线发送的转动角速度指令,以正负号区分左转还是右转;
- 实际反馈角度θreal是指方向盘(或转向传动装置上)安装的转角传感器测量并通过CAN总线反馈的方向盘转动角度;
- 最大超调角Δθ1是指方向盘转动过程中实际反馈角度超过目标角度的最大角度值;
- 最大角度误差Δθ2是指方向盘转动实际角度达到目标角度时允许存在最大误差;
- 转动响应延迟时间ΔT1是指CAN总线上开始发出目标角度指令的时刻到接收到实际反馈角度开始产生变化的时刻之间的时间差;
- 转动执行时间ΔT2是指实际反馈角度开始产生变化的时刻与反馈角度第一次达到目标角度时刻之间的时间差;
- 超调时间ΔT3是指反馈角度第一次达到目标角度时刻与反馈角度第一次达到最大角度误差要求时刻之间的时间差;
线控转向阶跃
发送正弦曲线,测试转向跟随是否合适.

线控驱动阶跃
发送不同油门踏板量,每次增加踏板量5%,记录指令下发至车辆开始运动的响应时间延时。

线控制动阶跃

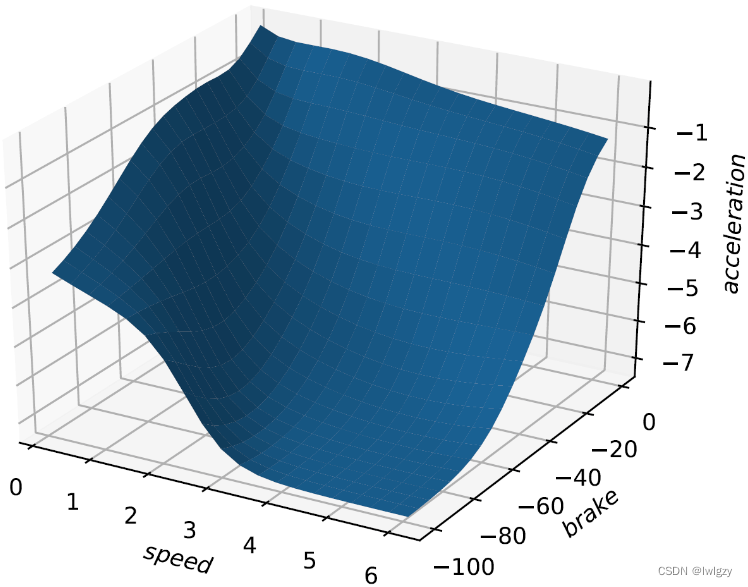
动力学性
1.即不同油门下,加速度的表现,最大加速度表现。
2.即不同刹车踏板下,减速度的表现,最大减速度表现。



![[每周一更]-(第100期):介绍 goctl自动生成代码](https://img-blog.csdnimg.cn/direct/a12ecf2f35644037adb8209605eccf85.jpeg#pic_center)