3.7动态规划--图像压缩_昵称什么的不存在的博客-CSDN博客
问题描述(再写一遍)
这篇文章是接着上面这一篇写的,就是写一个例子方便理解,模拟填写数组的过程
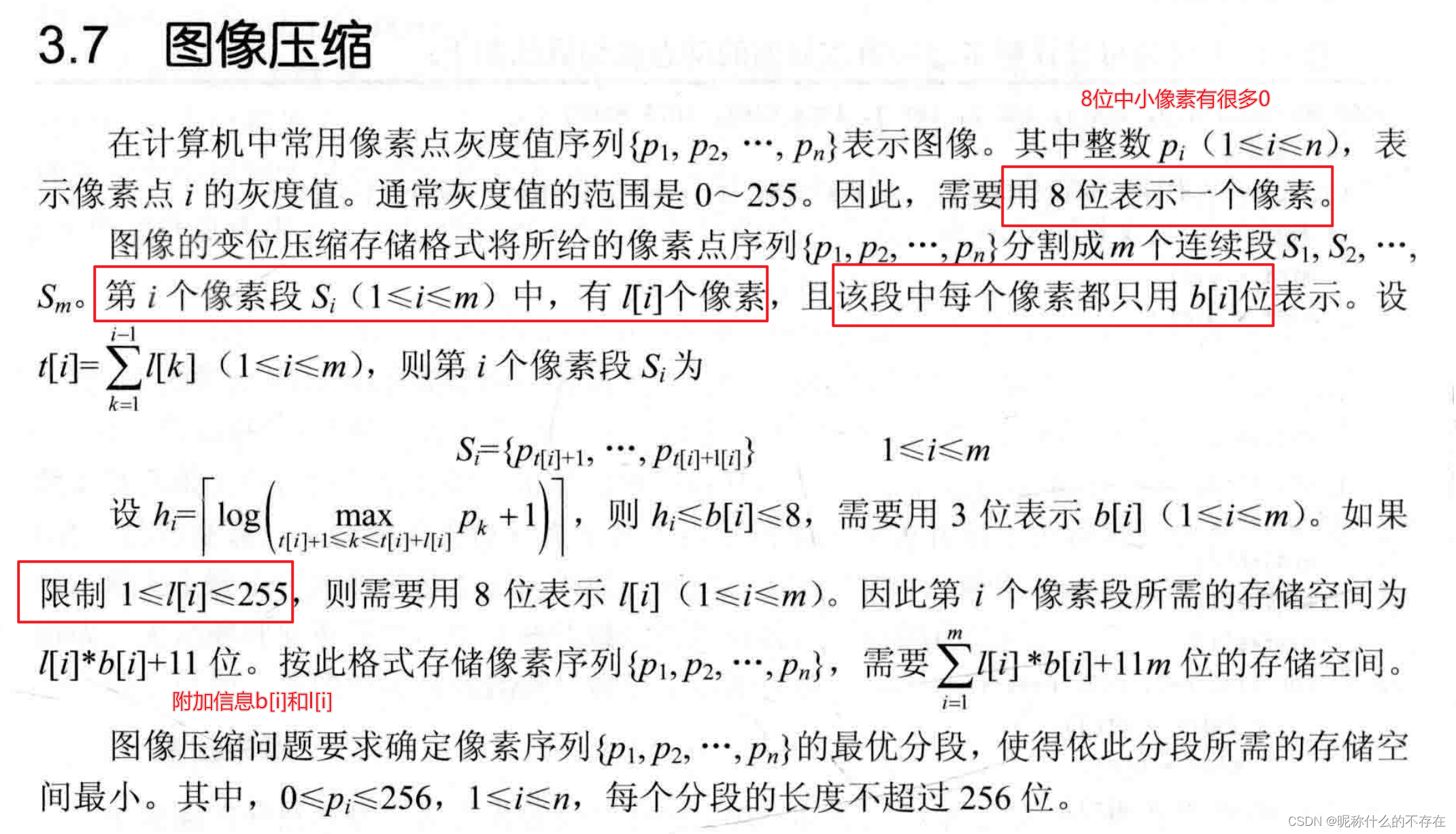
l: l[i]存放第i段长度, 表中各项均为8位长,限制了相同位数的元素<=256
B: b[i]存放第i段中像素的存储位数,表中各项均为3位长。最长的像素是八位表示一个像素,用二进制来表示:000/001/010/011/100/101/110/111。存储位数最多为3位
P: {p1,…p n2}以变长格式存储的像素的二进制串。分成m段,S1,S2,...,Sm
最优数组含义:s[i],1≤i≤n,是像素序列{p1,…,pi}(注意,是pi)的最优分段所需的存储位数。
一开始我们也不知道分了几段,m是最后backtrack回溯的时候才能确定下来。
像素序列4,6,5,7,129,138,1的最优分段,下标从1开始
| 初始化S[0]=0 | ||
| S[1]=S[0]+1*max{3}+11=14 | 对应:4 | S[1]=14 |
| S[2]=S[0]+2*max{3,3)+11=17 =S[1]+1*max{3}+11=14+3+11=28 | 对应:4,6 对应:4 | 6 | S[2]=17 |
| S[3]=S[0]+3*max{3,3,3}+11=20 =S[1]+2*max{3,3}+11=31 =S[2]+1*max{3}+11=31 | 对应:4,6,5 对应:4 | 6,5 对应:4,6 | 5 | S[3]=20 |
| S[4]=S[0]+4*max{3,3,3,3}+11=23 =S[1]+3*max{3,3,3}+11=34 =S[2]+2*max{3,3}+11=34 =S[3]+1*max{3}+11=34 | 对应:4,6,5,7 对应:4 | 6,5,7 对应:4,6 | 5,7 对应:4,6,5 | 7 | S[4]=23 |
| S[5]=S[0]+5*max{3,3,3,3,8}+11=51 =S[1]+4*max{3,3,3,8}+11=57 =S[2]+3*max{3,3,8}+11=52 =S[3]+2*max{3,8}+11=47 =S[4]+1*max{8}+11=42 | 对应:4,6,5,7,129 对应:4 | 6,5,7,129 对应:4,6 | 5,7,129 对应:4,6,5 | 7,129 对应:4,6,5,7 | 129 | S[5]=42 |
| S[6]=S[0]+6*max{3,3,3,3,8,8}+11=59 =S[1]+5*max{3,3,3,8,8}+11=65 =S[2]+4*max{3,3,8,8}+11=60 =S[3]+3*max{3,8,8}+11=55 =S[4]+2*max{8,8}+11=50 =S[5]+1*max{8}+11=61 | 对应:4,6,5,7,129,138 对应:4 | 6,5,7,129,138 对应:4,6 | 5,7,129,138 对应:4,6,5 | 7,129,138 对应:4,6,5,7 | 129,138 对应:4,6,5,7,129 | 138 | S[6]=50 |
| S[7]=S[0]+7*max{3,3,3,3,8,8,1}+11=67 =S[1]+6*max{3,3,3,8,8,1}+11=73 =S[2]+5*max{3,3,8,8,1}+11=68 =S[3]+4*max{3,8,8,1}+11=63 =S[4]+3*max{8,8,1}+11=58 =S[5]+2*max{8,1}+11=69 =S[6]+1*max{1}+11=62 | 对应:4,6,5,7,129,138,1 对应:4 | 6,5,7,129,138,1 对应:4,6 | 5,7,129,138,1 对应:4,6,5 | 7,129,138,1 对应:4,6,5,7 | 129,138,1 对应:4,6,5,7 | 129 | 138,1 对应:4,6,5,7 | 129,138 | 1 | S[7]=58 |
后面的继承前面的分段组合方式,然后一直往后加
遵循这样的递推关系

伪代码:
构造最优解: 最优分段的最后一段的段长度和像素位数分别存储于l[n], b[n]中,前一段的段长度和像素位数存储于**l[n - l[n]]和 b[n - l[n]]**中.
以此类推,由算法计算出的l和b可在O(n)时间内构造出相应的最优解.
代码
// 图像压缩
#include<bits/stdc++.h>
using namespace std;
int length(int i) //计算像素点p所需要的存储位数
{
int k = 1;
i = i/2;
while(i>0)
{
k++;
i = i/2;
}
return k;
}
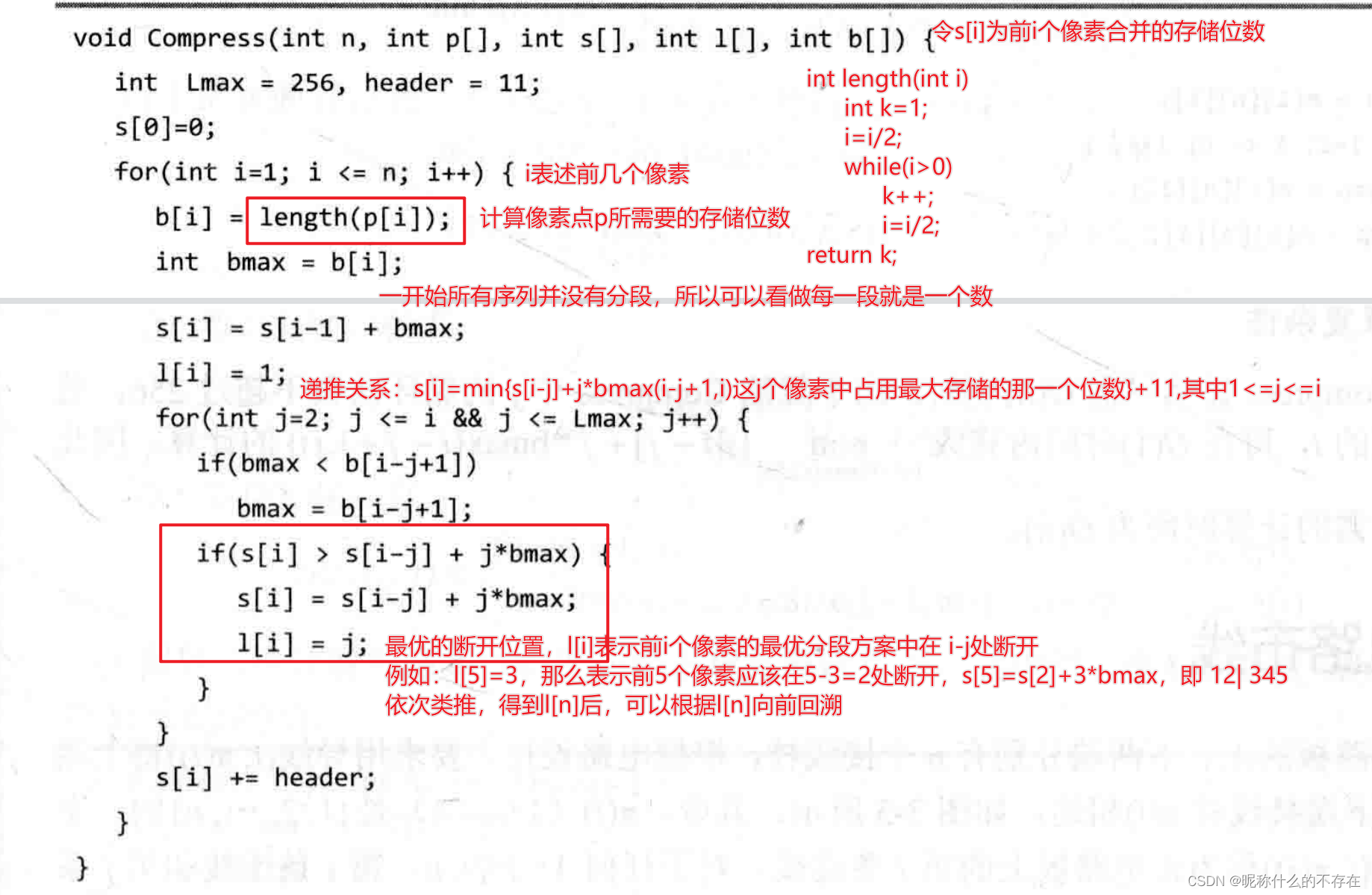
void Compress(int n, int p[], int s[], int l[], int b[]) //令s[i]为前i个段最优合并的存储位数
{
int Lmax = 256, header = 11;
s[0] = 0;
for(int i=1; i<=n; i++) //i表示前几段
{
b[i] = length(p[i]); //计算像素点p需要的存储位数
int bmax = b[i];
cout<<i<<"bmax: "<<bmax<<endl;
s[i] = s[i-1] + bmax; //故下面j从2开始
l[i] = 1;
for(int j=2; j<=i && j<=Lmax; j++) //递推关系:s[i]= min(1<=j<=i)(lsum(i-j+1, i)<=256) {s[i-j]+ lsum(i-j+1,i)*bmax(i-j+1,i) } + 11
{
if(bmax < b[i-j+1])
bmax = b[i-j+1];
if(s[i] > s[i-j] + j*bmax) //因为一开始所有序列并没有分段,所以可以看作每一段就是一个数,故lsum(i-j+1, i) = j;
{
s[i] = s[i-j] + j*bmax;
l[i] = j; //最优断开位置,l[i]表示前i段的最优分段方案中应该是在i-j处断开 比如l[5] = 3,这表示前五段的最优分段应该是(5-3=2)处断开,s[5] = s[2] + 3*bmax
//即 12 | 345,以此类推,得到l[n];之后构造最优解时再由l[n]向前回溯
}
}
s[i] += header;
}
}
void Traceback(int n, int &m, int s[], int l[])
{
if(n == 0) return;
Traceback(n-l[n], m, s, l);
s[m++] = n-l[n]; //重新为s[]数组赋值,用来存储分段位置
}
void Output(int s[], int l[], int b[], int n)
{
cout<<"The optimal value is "<<s[n]<<endl;
int m = 0;
Traceback(n, m, s, l);
s[m] = n;
cout<<"Decompose into "<<m<<" segments "<<endl;
for(int j=1; j<=m; j++)
{
l[j] = l[s[j]];
b[j] = b[s[j]];
}
for(int j=1; j<=m; j++)
cout<<"段长度:"<<l[j]<<" 所需存储位数:"<<b[j]<<endl;
}
int main()
{
int n;
while(cin>>n && n)
{
int p[n+1];
int s[n+1], l[n+1], b[n+1];
for(int i=1; i<=n; i++)
cin>>p[i];
Compress(n, p, s, l, b);
int m=0;
Traceback(n, m, s, l);
Output(s, l, b, n);
memset(p, sizeof(p), 0);
}
system("pause");
return 0;
}
/*6
10 12 15 255 1 2*/



![C#中[]的几种用法](https://img-blog.csdnimg.cn/c9f6bb41a0f24f06b985b645b89348c6.png)